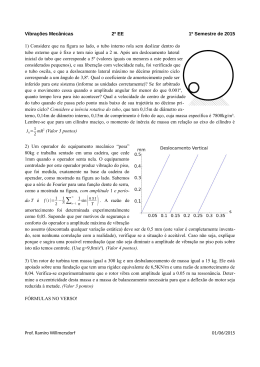
Aplicações: Desbalanceamento Rotativo, Excitação da Base, Isolamento de Vibrações 17 1 Aplicações: Desbalanceamento Rotativo Excitação da Base Isolamento de Vibrações 1 INTRODUÇÃO A vibração pode ser um fenômeno desejável ou indesejável. Em certos situações, como no caso de britadoras, transporte automático de peças por movimento vibratório, certos eletrodomésticos, etc., a vibração é desejável. Entretanto, na maioria dos casos, a vibração é um fenômeno indesejável, sendo causa de quebra de peças, geradora de ruídos, transmissora de forças às fundações das máquinas, etc. Nesse caso, procuramos minimizar os seus efeitos através do isolamento de vibrações, que consiste na colocação de uma suspensão (molas e amortecedores) entre a máquina e o solo. Tal suspensão pode ser ativa ou passiva. Dizemos que a suspensão é ativa quando a vibração é gerada pelo próprio sistema mecânico e, nesse caso, desejamos reduzir a vibração transmitida por ele para a base (fundação). É o caso, por exemplo, de prensas mecânicas que geram vibrações e as transmitem, através do solo, para as demais máquinas nas proximidades. Por outro lado, dizemos que a suspensão é passiva quando a vibração é gerada no meio ambiente e desejamos reduzir a vibração vinda da base para o sistema mecânico. É o caso, por exemplo, das vibrações geradas pelas irregularidades da estrada e que são transmitidas à carroceria de um automóvel. 2 VIBRAÇÃO DEVIDA AO DESBALANCEAMENTO ROTATIVO Se o centro de massa de um corpo rígido em rotação não coincidir com o centro de rotação, dizemos que o sistema está desbalanceado. A fig. 1 mostra uma máquina de massa total M, a qual inclui a massa desbalanceada m, situada a uma distância r (chamada excentricidade) do centro de rotação. Ao produto mr denominamos desbalanceamento. A máquina está montada sobre uma suspensão ativa composta por uma mola k e um amortecedor c. Consideremos que as partes rotativas (que compõem o rotor) giram com velocidade angular ω rad/s. Sabemos, da Física, que será gerada uma força centrífuga f0 com ponto de aplicação na massa m e módulo mω2r. Tal força gira com o rotor, apontando radialmente para fora. Aplicações: Desbalanceamento Rotativo, Excitação da Base, Isolamento de Vibrações 2 Na presente análise, vamos considerar o movimento apenas no sentido vertical, restringindo o movimento horizontal através de “paredes” verticais fictícias, conforme mostrado na figura. Tal consideração assegura um grau de liberdade ao sistema. Fig. 1 A força centrífuga desbalanceadora (1) f0 = mω2r pode ser decomposta em uma componente horizontal, f0cosωt, que é equilibrada pela reação da parede vertical, e em uma componente vertical (2) f(t) = mω2r senωt que fará o sistema vibrar na direção vertical. Comparando com o estudo feito anteriormente, concluímos tratar-se também de um forçamento harmônico, sendo que agora o valor da amplitude do forçamento é conhecido e dado pela eq. (1). Assim sendo, podemos aproveitar os resultados anteriores, simplesmente substituindo f0 por mω2r. Vimos que o fator de amplificação e o ângulo de fase são dados, respectivamente, por: X 1 FA = = (3) 2 2 f0 (1 − ν ) + (2ςν)2 k φ = arctg( − (4) 2ςν ) 1 − ν2 Substituindo f0 por mω2r na eq. (3) e tendo em conta que k = Mωn2, chegamos facilmente à expressão do fator de amplificação para o caso do desbalanceamento rotativo: (5) FA = MX = mr ν2 (1 − ν 2 ) 2 + (2ςν) 2 cujo gráfico é mostrado na fig. 2 para vários valores de ζ. Podemos tirar observações interessantes do gráfico, algumas delas semelhantes às obtidas para o caso já examinado anteriormente: Aplicações: Desbalanceamento Rotativo, Excitação da Base, Isolamento de Vibrações 3 Fig. 2 (1) Fatores de amortecimento mais fortes tendem a diminuir o fator de amplificação e, em conseqüência, a amplitude da vibração, principalmente para ν < 3. (2) Já para ν ≥ 3, quase nenhum proveito obtemos usando amortecedores mais fortes; isso é importante do ponto de vista prático: de nada adianta usarmos fortes amortecimentos com o objetivo de reduzir a amplitude da vibração quando o sistema operar com ν ≥ 3, pois, nessa faixa, as curvas praticamente coincidem. (3) Quando ν = 1 ocorre o chamado fenômeno da ressonância, no qual a freqüência da excitação iguala a freqüência natural do sistema e grandes amplitudes se observam. Normalmente, é uma situação indesejável, pois grandes amplitudes de vibração levam a altos níveis de tensão que podem conduzir ao colapso do material. Fazendo ν = 1 na eq. (5), obtemos o valor da amplitude na ressonância: (6) Xres = mr 2ςM Já a substituição de ν = 1 na eq. (4) permite que obtenhamos o valor do ângulo de fase na ressonância: (7) φ = π/2 (4) Por outro lado, podemos notar que os valores máximos de amplitude ocorrem, agora, um pouco à direita de ν = 1 e cada vez mais à direita, à medida que cresce o valor de ζ. Isso pode ser facilmente demonstrado usando a teoria dos máximos e mínimos, caso em que podemos provar que o valor máximo da amplitude se encontra na abcissa (8) ν= 1 1 − 2ς 2 Aplicações: Desbalanceamento Rotativo, Excitação da Base, Isolamento de Vibrações 4 No que diz respeito ao ângulo de fase, a eq. (4) permanece a mesma, logo também resta imutável o seu gráfico (ver fig. 3). Fig. 3 3 EXCITAÇÃO DA BASE Enfocaremos, agora, uma outra situação de forçamento harmônico também muito importante na prática: a vibração decorrente de uma excitação da base. Um exemplo clássico desse tipo de forçamento ocorre com um automóvel de massa m e suspensão composta por molas de rigidez total k e amortecedores de coeficiente de amortecimento total c, o qual se desloca com velocidade constante v sobre uma estrada cujo perfil y(x) possa ser considerado como senoidal, conforme ilustra a fig. 4 (a): Fig. 4 Nessas condições, estamos modelando o veículo como um sistema m-k-c de um só grau de liberdade e o terreno ondulado como a função senoidal (9) y(x) = A sen 2πx L onde A é a amplitude da onda senoidal do terreno e L é o comprimento dessa onda senoidal. O movimento do veículo ao longo do perfil y(x) resulta em um movimento vertical y(t) da roda. Considerando que a velocidade do carro é constante, podemos escrever Aplicações: Desbalanceamento Rotativo, Excitação da Base, Isolamento de Vibrações (10) 5 x = vt e o movimento vertical y(t) pode então ser expresso como (11) y(t) = A sen 2πvt L Consideremos, agora, o diagrama de corpo livre da fig. 4 (b). Nesse diagrama, z é a coordenada que descreve o movimento vertical da massa m do carro. Aplicando a 2a Lei de Newton obtemos . (12) . .. − c(z − y) − k(z − y) = m z donde chegamos a .. . . m z + c z + kz = c y + ky (13) Aqui também podemos calcular a resposta permanente usando a expressão obtida anteriormente, apenas substituindo o módulo da força, f0, pelo módulo da amplitude do deslocamento da base, A : (14) zss(t) = A |G(iω)| sen(ωt + φ) Na eq. (14), |G(iω)| é o módulo da função de transferência senoidal, φ é o ângulo de fase e ω é a freqüência da excitação, dada por 2πv ω= L Vamos, então, simplesmente calcular |G(iω)| e φ para o presente caso. Aplicando a transformação de Laplace à eq. (13): (ms2 + cs + k)Z(s) = (cs+k)Y(s) donde tiramos a função de transferência G(s) = Z(s)/Y(s): (15) G(s) = cs + k 2 ms + cs + k Podemos mostrar que, agora, o fator de amplificação, que é a relação entre a amplitude da vibração, Z, e a amplitude da excitação, A, é dado por (16) FA = Z = A 1 + (2ςν) 2 (1 − ν 2 ) 2 + (2ςν) 2 e que o ângulo de fase é dado por (17) φ = arctg( − 2ςν3 1 − ν 2 + (2ςν)2 ) Aplicações: Desbalanceamento Rotativo, Excitação da Base, Isolamento de Vibrações 6 Os gráficos das eqs. (16) e (17) estão ilustrados, respectivamente, nas figs. 5 e 6: Fig. 5 Fig. 6 Examinando a fig. 5, podemos extrair dela algumas conclusões importantes: (1) Fatores de amortecimento mais fortes tendem a diminuir o fator de amplificação e, em conseqüência, a amplitude da vibração, principalmente nas vizinhanças de ν = 1. (2) Todas as curvas, independentemente do valor de ζ, passam pelo ponto ( 2 , 1). Portanto, para ν > 2 , nenhum proveito obtemos usando amortecedores mais fortes, pois, ao contrário, verifica-se uma troca de posição das curvas. Isso é importante do ponto de vista prático: à direita de ν = 2 , o uso de fortes amortecimentos tende a amplificar (ao invés de reduzir) a amplitude da vibração. (3) Quando ν = 1 ocorre o chamado fenômeno da ressonância, no qual a freqüência da excitação iguala a freqüência natural do sistema e grandes amplitudes se observam. Normalmente, é uma situação Aplicações: Desbalanceamento Rotativo, Excitação da Base, Isolamento de Vibrações 7 indesejável, pois grandes amplitudes de vibração levam a altos níveis de tensão que podem conduzir ao colapso do material. Fazendo ν = 1 na eq. (16), obtemos o valor da amplitude na ressonância: (18) X= A 1 + 4ς 2 2ς Já a substituição de ν = 1 na eq. (17) permite obter o valor do ângulo de fase na ressonância: (19) φ = arctg(-1/2ζ) (4) Podemos também notar que os valores máximos de amplitude ocorrem um pouco à esquerda de ν = 1 e cada vez mais à esquerda à medida que cresce o valor de ζ. As abcissas onde ocorrem tais máximos podem ser obtidas através da aplicação da teoria de máximos e mínimos, à semelhança do que foi feito anteriormente para os casos de excitação da massa por força harmônica e de desbalanceamento rotativo. Já o exame da fig. 6, referente ao ângulo de fase, permite notar que, para ν < 1, φ tende para zero, enquanto que para ν > 1 ele tende para -π/2. 4 ISOLAMENTO DE VIBRAÇÕES O isolamento de vibrações é um processo pelo qual os efeitos da vibração são minimizados, já que é impossível eliminá-los. Conforme a suspensão (que desempenha o papel de isolador) seja ativa ou passiva, ela reduzirá, respectivamente, a amplitude da força transmitida do sistema para a base (fig. 7a), ou a amplitude do movimento transmitido da base para o sistema (fig. 7b). Fig. 7 O isolador de vibrações, obviamente, é um conjunto de molas (rigidez equivalente k) e amortecedores (coeficiente de amortecimento equivalente c). A medida do isolamento de vibrações é feita através de um parâmetro denominado transmissibilidade. A transmissibilidade, simbolizada por TR, é definida de acordo com o tipo de suspensão. Assim: Aplicações: Desbalanceamento Rotativo, Excitação da Base, Isolamento de Vibrações • suspensão ativa: (20) TR = amplitude da força transmitida amplitude da força de excitação • suspensão passiva: (21) TR = amplitude domovimento transmitido amplitude do movimento de excitação Para o cálculo da TR, no caso da suspensão ativa, vamos considerar o sistema da fig. 8: Fig. 8 cuja modelo matemático já foi obtido anteriormente, como sendo .. . m x + c x + kx = f(t) = f0 sen ωt Aplicando a transformada de Laplace: (22) (ms2 + cs + k)X(s) = F(s) Por outro lado, a força transmitida à estrutura fixa é dada pela soma vetorial da força transmitida através da mola e da força transmitida através do amortecedor, ou seja: . ftr(t) = c x + kx Aplicando a transformada de Laplace: (23) Ftr (s) = (cs + k)X(s) Eliminando X(s) nas eqs. (22) e (23), chegamos à função de transferência (24) G(s) = Ftr (s) cs + k = 2 F(s) ms + cs + k 8 Aplicações: Desbalanceamento Rotativo, Excitação da Base, Isolamento de Vibrações 9 Comparando as eqs. (24) e (16), vemos que as mesmas são idênticas, logo podemos aproveitar o desenvolvimento já feito para concluir que, no caso da suspensão ativa: TR = (25) 1 + (2ςν)2 (1 − ν2 )2 + (2ςν)2 Por outro lado, para o caso da suspensão passiva, a TR é facilmente identificada simplesmente pelo exame das eqs. (21) e (16), o que nos conduz à mesma expressão (25) para a TR. Portanto, podemos concluir que a TR, para ambos os tipos de suspensão, é dada pela eq. (25). EXERCÍCIOS 1 Observa-se que a vibração livre de uma haste vertical engastada cai de uma amplitude inicial de 20 mm à metade desse valor em 10 ciclos. Calcular a amplitude da resposta permanente na ressonância quando a base da viga é excitada pelo deslocamento horizontal harmônico da figura, dado em m. Solução 1 X0 1 20 ln δ = ln = = 0,0693 n Xn 10 10 ς= Na ressonância : ν = 1 ⇒ FA = δ 2 4π + δ X = A 2 = 0,0693 2 4π + 0,06932 1 + (2ςν )2 (1 − ν ) 2 2 + (2ςν )2 = = 0,011 1 + (2ς )2 2ς = 1 + (2x0,011)2 2x0,011 = 45,466 Logo : X = 0,001x 45,466 = 4,5466x10 -2 m = 45,466 mm 2 Um motor elétrico, de massa 25 kg, está montado sobre a extremidade de uma viga horizontal em balanço. Em vibração livre, a razão entre duas amplitudes consecutivas quaisquer é 2:1. Calcular a transmissibilidade quando o motor estiver operando em uma rotação tal que ω = 5ωn. Resp.: 0,062 Aplicações: Desbalanceamento Rotativo, Excitação da Base, Isolamento de Vibrações 3 10 Um motor elétrico aciona um equipamento mecânico a uma velocidade de 1750 rpm. O sistema está montado sobre calços de borracha os quais apresentaram uma deflexão estática de 5 mm quando da montagem. Determinar o percentual de força transmitida à fundação se o fator de amortecimento do sistema for 0,25. Solução ωn = g δ est = 9,81 = 44,29 rad / s 0,005 1750x2π = 183,26 rad/s 60 ω 183,26 ν= = = 4,137 44,29 ωn ω= TR = Logo : 4 1 + (2ςν )2 (1 − ν ) 2 2 + (2ςν )2 = 1 + (2x0,25x 4,137 )2 (1 − 4,137 ) 2 2 + (2x0,25x 4,137 )2 = 0,1414 TR = 14,14 % Um equipamento eletromecânico está montado sobre um conjunto de isoladores de borracha. O sistema, cuja freqüência natural é 500 rpm, exibe, na ressonância, um fator de amplificação igual a 5. A partir de qual freqüência a transmissibilidade de força é reduzida a 50%? Resp.: 879 rpm 5 A figura mostra a resposta em freqüência do movimento vertical do piso nas proximidades de uma prensa. Estimar o fator de amortecimento ζ e calcular a transmissibilidade a 1800 rpm. Resp.: ζ = 0,0625 TR = 0,133 Aplicações: Desbalanceamento Rotativo, Excitação da Base, Isolamento de Vibrações 6 11 Um bloco de massa 35 kg está ligado a um suporte através de uma mola de rigidez 1,4 x 106 N/m e um amortecedor de coeficiente de amortecimento 1,8 x 103 Ns/m. O suporte se movimenta com deslocamento harmônico de amplitude 10 mm e freqüência 35 Hz. Calcular a amplitude da resposta permanente do bloco. Resp.: 29,4 mm 7 A figura mostra um modelo simplificado da suspensão de um veículo que trafega sobre uma estrada cujo perfil pode ser admitido como y(x) = A sen(2πx/L) em metros, onde A = 0,01 m é a amplitude do perfil senoidal e L = 2,5 m é o comprimento de um ciclo. Calcular a amplitude da vibração do veículo. Resp.: 0,687 mm 8 Um motor elétrico gira a 1750 rpm e deve ser montado sobre suportes de borracha. Há disponibilidade de dois tipos de suportes: os do tipo A possuem deflexão estática de 5 mm e os do tipo B, 8 mm. Qual tipo é o mais adequado no que diz respeito ao isolamento de vibrações? Considerar que ambos os tipos apresentam um fator de amortecimento de 0,2.
Baixar