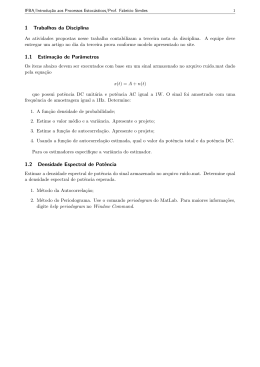
MODELAGEM E ANÁLISE DE ESTABILIDADE PARA CURVA DE POTÊNCIA EM TURBINAS EÓLICAS. Raffael Queiroz de Almeida∗, José Oniram de Aquino Limaverde Filho∗, Bruno Batista Suehara∗, Eugênio Liborio Feitosa Fortaleza∗ ∗ GRACO - Grupo de Automação e Controle Universidade de Brası́lia, Campus Darcy Ribeiro Asa Norte 70.910-900 Brası́lia, Distrito Federal, Brasil Emails: [email protected], [email protected], [email protected], [email protected] Abstract— The development and the growth in demand for wind energy generates more researches on the power optimization area of the wind turbines. This article illustrates the stall problem found for low rotational speed in wind turbines that cause inaccuracy in power curve of the system. This study demonstrates the dynamic modeling of the system with the use of an external resistance as input in order to analyze the behavior of rotational speed and is applied the tangent linearization method to analysis of stability of the system in function of the poles of the system. The use of resistance as input system has important results on the instability area, therefore this study can be a reference for the implementation of a non-linear control method of rotational speed for wind systems. Keywords— Systems control, Wind Turbine, Analysis of stability and Power curve. Resumo— O desenvolvimento e o crescimento na demanda por energia eólica fazem com que se desenvolvam cada vez mais pesquisas na área de otimização de potência de produção das turbinas eólicas. O presente artigo mostra o problema de stall encontrado para baixas rotações em turbinas eólicas causando imprecisão na curva de potência do sistema. Neste estudo foi demonstrado a modelagem dinâmica do sistema utilizando uma resistência externa como entrada para a análise do comportamento da velocidade de rotação e aplicou-se o método de linearização tangente para análise de estabilidade em função dos pares de polos do sistema. O uso da resistência externa como entrada obteve resultados importantes na zona de instabilidade, logo o presente estudo pode servir de referência para a implementação de métodos de controle não linear no controle da velocidade de rotação de sistemas eólicos. Palavras-chave— 1 Controle de sistemas, Turbina eólica, Análise de estabilidade e Curva de potência. Introdução As turbinas eólicas são conhecidas por possuı́rem um problema de stall em baixas rotações (Burton et al., 2001). O que produz uma súbita queda no torque produzido e torna instável o sistema em um certo intervalo de pontos de operação (velocidades de rotação que não podem ser obtidas em regime permanente com o sistema em malha aberta). Este trabalho foi baseado em uma turbina eólica em escala reduzida, com condições de vento constante gerada por um túnel de vento, utilizada para os testes experimentais. Um importante parâmetro nos estudos de turbinas eólicas é o coeficiente de potência Cp que traduz a quantidade de energia mecânica gerada que é fortemente dependente das velocidades de rotação e do vento. O Cp varia com a velocidade do vento, a velocidade de rotação e o ângulo da pá β. Logo, a curva de potência é definida pela seguinte expressão empı́rica (Slootweg et al., 2001): G5 G2 − G3 β − G4 e i (1) Cp (λ, β) = G1 i onde G1 , G2 , G3 , G4 e G5 são coeficientes que variam de acordo com o formato da hélice da tur- bina. β é dado em graus e i é obtido de: 1 1 0.035 = − 3 i λ + 0.08β β +1 (2) A curva de potência baseia-se principalmente na variação do ângulo da pá e da relação de velocidade λ que é dependente da velocidade de rotação. A Figura 1 mostra os testes de potência para diferentes ângulos de pá: Figura 1: Coeficiente de potência em função dos diferentes ângulos de passo e relação de velocidade. (González-Longatt et al., 2011). A utilização de freios mecânicos (com torques constantes) não conseguem estabilizar a rotação da turbina na faixa instável da velocidade de rotação do sistema. Logo, se faz necessária a utilização de outros tipos de freios em malha fechada nesta faixa em questão para o controle da velocidade de rotação. A linearização tangente utilizada como ferramenta de controle é importante para a análise e compreensão de sistemas não lineares. A forte acessibilidade de um sistema não linear está intimamente ligada com a controlabilidade do sistema linearizado tangente (Coron, 1994). Portanto, o presente artigo tem o objetivo de modelar o sistema eólico não linear inserindo uma resistência externa variável como entrada, com a função de utilizá-la como um freio para se obter uma melhor precisão na curva de potência de turbinas eólicas, além de aplicar o método de linearização tangente para a definição exata da área de instabilidade da velocidade de rotação do modelo. 2 onde ω é a velocidade de rotação e o r é o raio da pá. Para o sistema em questão, o ângulo da pá utilizado foi β = 0, e os valores de Cp variaram em função da velocidade de rotação ω, pois o sistema possui raio de pá e velocidade do vento constantes. Foi utilizado no sistema um método de aproximação da curva de potência e ao utilizar a aproximação quadrática é possı́vel gerar um polinômio com determinada ordem que facilita a manipulação algébrica no sistema conforme a Figura 3. Modelagem da Turbina Eólica O modelo em questão é definido através de uma turbina eólica em escala reduzida. A turbina é utilizada dentro de um túnel de vento e possui as pás do sistema pré-moldadas. O sistema consiste em uma hélice que recebe as pás, ligada a um motor DC que tem a função de gerar energia e este é ligado à uma resistência variável em série com o circuito do motor, conforme a Figura 2: Figura 3: Pontos de potência com dados experimentais e curva de potência do polinômio aproximado, Laboratório de termociencia e metodologia dinâmica UnB (2015). Portanto, pode-se inferir pelo método dos mı́nimos quadrados que o polinômio gerado pela curva de Cp xλ é definido da seguinte forma: Cp = a1 λ4 + a2 λ3 + a3 λ2 + a4 λ Figura 2: Turbina eólica em escala reduzida localizada dentro do túnel de vento, Laboratório de termociência e metodologia dinâmica UnB (2015). 2.1 Modelagem aerodinâmica Sendo a energia dada pelo produto da potência pelo tempo, a potência mecânica que o vento transfere à turbina pode ser calculada da seguinte forma (Ackermann et al., 2005): Pm = 1 ρπr2 v 3 Cp 2 (3) onde ρ é a densidade do ar, πr2 é a área varrida pelo rotor da turbina, v é a velocidade do vento e Cp é o coeficiente de potência. O coeficiente de potência, pode ser entendido como um fator de rendimento da turbina. A relação de velocidade λ é definida como: ωr λ= (4) v (5) onde os valores de a são os coeficientes de aproximação geradas pelo método dos mı́nimos quadrados conforme a tabela 1. Tabela 1: Coeficientes da turbina eólica. Sı́mbolo Valor a1 −0.004883 a2 0.02959 a3 −0.04195 a4 0.024622 O torque aerodinâmico Ta pode ser calculado a partir da potência mecânica extraı́da da turbina dividido pela velocidade de rotação. Ta = Pm ω (6) Substituindo (5) em (3) e posteriormente (3) em (6), obtemos as constantes e a seguinte expressão final para o torque aerodinâmico: Ta = c1 ω 3 + c2 ω 2 + c3 ω + c4 (7) onde temos que: c1 = 1ρπa1 r4 2v (8) c2 = 1ρπa2 r3 2 (9) c3 = 1ρπa3 r2 v 2 (10) Figura 4: Representação do modelo mecânico para turbina eólica de uma massa (Iov et al., 2004). (11) Como o sistema de uma massa possui somente um eixo, a rigidez e o fator de amortecimento podem ser desconsiderados pelo fator de redução do rotor. Assim, o modelo de uma massa pode ser representado da seguinte forma: c4 = 2.2 1ρπa4 rv 2 2 Modelagem do gerador ω̇ = O gerador em questão se trata de um motor DC, o qual consiste em enrolamentos no motor que giram segundo um campo magnético gerado por imãs. Pela lei das malhas de Kirchhoff, o circuito eletromecânico de um gerador DC, é definido como: 1 I˙a = [Km ω − Ra Ia ] La (12) onde La é a indutância, Km é a constante eletromotriz, Ra é a resistência interna e o Ia é a corrente do sistema. O torque elétrico de um motor DC pode ser definido da seguinte forma: Te = Km Ia (13) Ao inserir uma resistência externa variável em série com sistema elétrico (12), tem-se que: 1 I˙a = [Km ω − Ra Ia − Re Ia ] La (14) A resistência será utilizada como entrada para a turbina com o objetivo de ser uma alternativa para controlar a velocidade de rotação do sistema. 2.3 Modelagem mecânica A equação dinâmica da parte mecânica do sistema, pode ser definida em dois pontos: de um lado fica o rotor que recebe torque aerodinâmico resultante da entrada do vento e por outro lado temos o gerador que sofre influência da velocidade de rotação do rotor e gera um torque elétrico de retorno sobre o mesmo, como pode ser representado na Figura 4: 1 [Ta − Te ] J (15) onde ω̇ é a aceleração da rotação, J é a soma dos momentos de inercia do rotor e da turbina e Te é o torque elétrico. Portanto substituindo (7) e (13) em (15), tem-se que: J ω̇ = [c1 ω 3 + c2 ω 2 + c3 ω + c4 − Km Ia ] 3 3.1 (16) Aplicação do linearizado tangente no sistema Representação do sistema Substituindo x1 = ω e x2 = Ia em (14) e (16), o comportamento dinâmico da turbina eólica pode ser representada pelas seguintes equações: 1 3 2 x˙1 = J c1 x1 + c2 x1 + c3 x1 + c4 − Km x2 x˙2 = 1 [Km x1 − Ra x2 − Re x2 ] La (17) 3.2 Definição do sistema em função da velocidade de rotação e resistência externa Inicialmente isola-se o seguinte termo: −Km x2 = [J ẋ1 − c1 x31 − c2 x21 − c3 x1 − c4 ] (18) Em seguida, deriva-se (17), resultando: J x¨1 = [3c1 x31 x˙1 + 2c2 x1 x˙1 + c3 x˙1 − Km x˙2 ] (19) Substituindo (17) em (19), tem-se que: J x¨1 = [3c1 x21 x˙1 + 2c2 x1 x˙1 + c3 x˙1 − + Ra K m Re Km x2 + x2 ] La La 2 Km x1 La (20) 4 Resultados Por fim, substitui-se (18) em (20): J x¨1 = 3.3 [3c1 x21 x˙1 K2 + 2c2 x1 x˙1 + c3 x˙1 − m x1 La − JRa C1 Ra 3 C2 Ra 2 x˙1 + x + x La La 1 La 1 + C4 Ra Re Km C 3 Ra x1 + + x2 ] La La La Tabela 2: Parametros da turbina eólica. (21) Linearização dos termos A linearização dos termos não lineares do sistema através da aplicação do linearizado tangente pode ser representado pelo limite do termo não linear na vizinhança do ponto de equilı́brio. Sendo a os pontos de equilı́brio para velocidade de rotação, b são os pontos de equilı́brio para corrente e d são as resistências associados a cada um dos pontos. lim f (x) = f (P E) + f (P E)0 (x − P E) |{z} (22) x→P E 3.4 Os parâmetros utilizados na simulação numérica, podem ser visualizados na Tabela 2: Substituição dos termos linearizados e função de transferência do sistema linearizado Parâmetro Momento de inércia do sistema (J) Raio da pá (r) Indut^ ancia(La) Constante eletromotriz (Km) Resist^ encia interna (Ra) Massa especı́fica do ar (Rho) Velocidade do vento (v) 4.1 Valor 0.0109 kg/m2 0.5211 N m/A 0.0085 H 0.5211 V s/rad 29 Ω 1.2 kg/m3 14 m/s Comportamento da velocidade de rotação através dos termos do denominador da função de transferência. Para a identificação da zona de instabilidade do sistema, aplicou-se na função de transferência do sistema linearizado um vetor de pontos de equilı́brio da velocidade de rotação variando de 0 a 230 rad/s, obtendo assim os pontos de equilı́brio equivalente da corrente e resistência externa. O comportamento do sistema pode ser visualizado na Figura 5: Obtido a linearização dos termos não lineares substitui-se em (21). Portanto, o sistema linearizado pode ser representado por: A=− B= − C= − 2C2 a C3 Ra b 3C1 a2 − − + + J J J La La (23) 2 3C1 Ra a2 2C2 Ra a C3 Ra Km − + + JLa JLa JLa JLa 3C1 ba2 2C2 ba C3 b − − JLa JLa JLa (24) Ra Ra Ra 2C1 a2 + C2 a2 − C4 La La La b b Km b 2C1 a2 + C2 a2 − C4 − bd (25) La La La La Resultando: x¨1 + Ax˙1 + Bx1 + C = Km dRe La (26) Para obter a função de transferência do sistema aplicou-se a transformada de Laplace no sistema linearizado (26), assumido como entrada a resistência externa e saı́da a velocidade de rotação, tem-se que: x1 (s) Km d/La = 2 Re (s) S + AS + B (27) Figura 5: Função de transferência do sistema em função dos pares de pontos de equilı́brio para parte do denominador, Termo A e Termo B. Nota-se que a zona de instabilidade na velocidade de rotação varia entre os valores de 62 a 143 rad/s, que pode ser caracterizado pela parte negativa evidenciada no termo B do denominador da função de transferência. O termo A não influencia na instabilidade do sistema pois os pontos de equilı́brio em A são sempre positivo, logo são estáveis. 4.2 Comportamento da resistência externa em função da velocidade de rotação do sistema. O comportamento da resistência externa em função da velocidade de rotação é importante para observar o comportamento da variação da resistência nas zonas de estabilidade e instabilidade do sistema. Conforme observado na Figura 6: Figura 6: Comportamento da resistência externa em função da velocidade angular. Figura 8: Representação do modelo dinâmico do sistema em função velocidade de rotação. Para x˙1 = 0.0001, x˙2 = 0.33 e Re = 223.4Ω, tem-se a Figura 9: Percebe-se na faixa de 160 a 280Ω , que as resistências externas podem ser iguais em três pontos da velocidade de rotação. De acordo com a zona de instabilidade definida pelo linearizado do sistema, observa-se que pode existir valores de resistências externas iguais tanto na zona estável, quanto na zona instável da velocidade de rotação do sistema. Figura 9: Representação do modelo dinâmico do sistema em função velocidade de rotação. 4.3 Comportamento da resistência externa em função da velocidade de rotação do sistema. Para x˙1 = 220, x˙2 = 0.33 e Re = 195.5Ω, tem-se a Figura 10: As simulações do modelo dinâmico do sistema são importantes para mostrar o comportamento da velocidade de rotação conforme a variação dos parâmetros escolhidos. Para x˙1 = 0.0001, x˙2 = 0.33 e Re = 159Ω, tem-se a Figura 7: Figura 10: Representação do modelo dinâmico do sistema em função velocidade de rotação. Figura 7: Representação do modelo dinâmico do sistema em função velocidade de rotação. Para x˙1 = 0.0001, x˙2 = 0.33 e Re = 308.4Ω, tem-se a Figura 8: Nota-se na Figura 7 que ao se definir uma condição inicial próxima de zero e uma resistência externa equivalente a uma velocidade de rotação muito baixa o sistema tende a estabilizar na região estável até 42 rad/s. Logo na Figura 8, quando define-se uma resistência externa equivalente a uma velocidade de rotação muito alta, o sistema tende a estabilizar na região estável acima de 143 rad/s. O comportamento do sistema é semelhante ao se definir uma condição inicial alta, pois como pode ser observado na Figura 10, ao colocar uma condição inicial elevada e uma resistência externa equivalente a uma velocidade de rotação alta, o sistema estabiliza na região estável acima de 143 rad/s. Logo ao colocar uma resistência externa equivalente a uma velocidade de rotação baixa, o sistema estabiliza na zona estável abaixo de 42 rad/s. Por outro lado, ao observamos a Figura 9 que representa uma condição inicial baixa e uma resistência equivalente a uma velocidade de rotação localizada dentro da zona instável, observa-se que o sistema tende a estabilizar na zona estável mais próxima das condições iniciais que foram definidas, portanto como foi definido uma condição inicial próxima de zero o sistema tende a estabilizar em uma velocidade de rotação da zona estável abaixo de 42 rad/s. Logo através da análise dos resultados observa-se que o sistema em malha aberta não consegue convergir na área de instabilidade da velocidade de rotação. 5 Conclusão A modelagem do sistema utilizando uma resistência externa variável, permitiu observar o comportamento do sistema através da variação da resistência e identificando-a como uma possı́vel entrada para um controlador. A modelagem do sistema foi corretamente definida e validada através de simulações, o qual representou bem as condições do sistema real. A aplicação do método linearizado tangente foi capaz de definir corretamente a área de estabilidade do sistema e possibilitou a avaliação do comporta-mento do sistema através da função de transferência. Sugere-se a aplicação de um método de controle não linear para o sistema, com o objetivo de estabilizar o sistema em velocidades de rotação dentro da área de instabilidade utilizando a variação da resistência externa como entrada. Acknowledgment Os autores agradecem as instituições ANP, FINEP, MCTI e Petrobrás pela colaboração com o Programa PRH-PB 223 e por todo o apoio prestado para este trabalho. Referências Ackermann, T. et al. (2005). Wind power in power systems, Vol. 140, Wiley Online Library. Burton, T., Sharpe, D., Jenkins, N. and Bossanyi, E. (2001). Wind energy handbook, John Wiley & Sons. Coron, J.-M. (1994). Linearized control systems and applications to smooth stabilization, SIAM journal on control and optimization 32(2): 358–386. González-Longatt, F., Wall, P. and Terzija, V. (2011). A simplified model for dynamic behavior of permanent magnet synchronous generator for direct drive wind turbines, PowerTech, 2011 IEEE Trondheim, IEEE, pp. 1–7. Iov, F., Hansen, A. D., Sorensen, P. and Blaabjerg, F. (2004). Wind turbine blockset in matlab/simulink, Denmark: Aalborg University . Slootweg, J., Polinder, H. and Kling, W. (2001). Dynamic modelling of a wind turbine with doubly fed induction generator, Power Engineering Society Summer Meeting, 2001, Vol. 1, IEEE, pp. 644–649.
Baixar