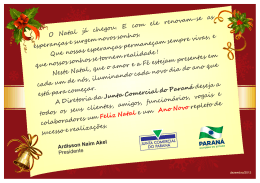
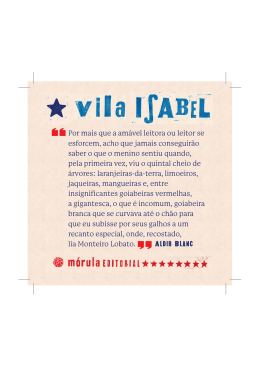
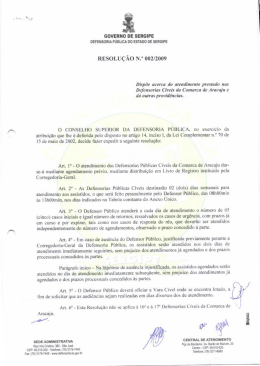
geometria e medidas Números e funções Guia do professor Experimento Transformação de Möbius Objetivos da unidade 1. Estudar o efeito da translação, rotação e dilatação no plano complexo; 2. Pôr em prática propriedades de matrizes; 3. Realizar propriedades de números complexos; 4. Apresentar a transformação de Möbius. licença Esta obra está licenciada sob uma licença Creative Commons Secretaria de Educação a Distância Ministério da Ciência e Tecnologia Ministério da Educação Governo Federal Guia do professor Transformação de Möbius Sinopse Depois de visualizar a translação, a rotação e a dilatação de um triângulo no plano complexo através de uma multiplicação de matrizes, os alunos deverão obter as formas analíticas de tais transformações. Em seguida, será apresentado um caso particular da Transformação de Möbius e algumas de suas interessantes características. Conteúdos Números Complexos, Interpretação Geométrica; Matrizes, Propriedades e Aplicações; Geometria Plana, Transformações. Objetivos 1. Estudar o efeito da translação, rotação e dilatação no plano complexo; 2. Pôr em prática propriedades de matrizes; 3. Realizar propriedades de números complexos; 4. Apresentar a transformação de Möbius. Duração Três aulas: será necessária uma aula de explicações entre as atividades sugeridas. Material relacionado Vídeo: Um sonho complexo; Software: Movimentos complexos. Introdução Motivação O estudo das transformações desempenha um papel muito importante em várias áreas da matemática, bem como da ciência como um todo. Uma grande importância das transformações reside no fato de elas tornarem possível transformar problemas aparentemente complicados em problemas análogos com soluções mais simples. August Ferdinand Möbius, matemático alemão que nasceu em 1790 e morreu em 1868, introduziu o que hoje conhecemos por Transformação de Möbius como sendo uma transformação complexa de variável complexa, definida por uma composição de convenientes transformações mais sim ples, a saber: translação, rotação, dilatação (ou contração) e inversão. A proposta deste experimento é apresentar uma maneira simples de introduzir a Transformação de Möbius através de exemplos, utilizando os conceitos e propriedades de matriz e de número complexo. Em especial, são utilizadas as interpretações geométricas das operações de números complexos. Por simplicidade, não vamos considerar transformações que envolvem a inversão em sua composição. Na primeira etapa, apresentamos os movimentos básicos, ou seja, trans lação, dilatação (ou contração) e rotação, que compõem a transformação, por meio de seus efeitos sobre um triângulo no plano. Na segunda etapa, são propiciadas condições para que os alunos encontrem a forma analí tica associada a cada uma das transformações apresentadas na primeira etapa. A terceira etapa envolve o estudo de transformações que podem ser expressas como composição de pelo menos dois dos movimentos básicos e tem como objetivo desenvolver a habilidade de identificação destes movimentos, assim como de associação entre a forma analítica da transformação e seu comportamento geométrico. O estudo de números complexos na maioria das vezes não é abordado nas aulas do Ensino Médio. O motivo seja talvez pelo fato de não estar em evidência em problemas de nível elementar ou, também, por falta de materiais adequados de apoio ao ensino-aprendizagem. Este experimento vem mostrar uma aplicação que contempla estes dois aspectos: está em nível adequado para alunos do Ensino Médio e preten demos que se torne um material de apoio a ser utilizado nas escolas. Além disso, trata-se de uma interessante aplicação envolvendo a inves tigação de transformações convenientes no plano através de funções que levam números complexos em números complexos. Esta proposta vem facilitar sobremaneira o estudo dessas transformações com suas atuações em triângulos e mostrar suas relações com matrizes. O experimento Comentários iniciais O desenvolvimento deste experimento propicia rever conceitos de matrizes e suas propriedades, assim como rever o conceito de números complexos, suas operações e propriedades. . Etapa 1 Matrizes e transformações Nesta etapa, o aluno deve compreender como atua no triângulo cada uma das transformações: translação, rotação e dilatação (ou contração), através da visualização de um exemplo específico. Transformação de Möbius Guia do professor 2 / 19 Antes de iniciar o experimento, o professor poderá fazer uma revisão com os alunos do conceito de números complexos e suas operações az + b e, também, do conceito de matrizes. Além disso, deve ser apresentada f(z) = cz + d a definição de Transformação de Möbius e mostrar como pode ser expressa na forma matricial. Uma Transformação de Möbius é uma função complexa dada por Matriz associada a uma Transformação de Möbius abcd az + b Observando pode em ad − bc = 0o diagrama c = 0 a seguir, z = d c = 0 que f(z) = ser expressa c= 0 c notamos d notação matricial. � a c � az + b az + b 1 − bc = 0= az + 0b czz+=dd f(z) = a b c d z ad c = c = 0= f(z f(z) c az + b az + b b d cz + d cz + d , abcd ad − bc = 0 c = 0 z = d f(z) = c=0 f(z) = c=0 c cz + d d az az az az ++ + + bbbb az + b az + b dddd az az az ++ + + bbbb az az + b d az d+b com af(z) ,dd números complexos condição f(z) f(z) (z) z) == = = aa,abbbbc,cc= d cd ad ad ad ad −− − − bc bc bc bc a== b= =0c000d f(z)ccec= = c= ad = =00az 00−+ bczbzz= = z= = = 0c.ca ccd = cc= c= = 0=0000adzf(z) − = f(z) f(z) f(z) bc = ==0 c = 0c = 0cf(z) cc= c= = =00z= 00= cd c = c0 = 0 f(z) = az + b c=0 cA cab c= az ++ bb az + b b0 f(z) =cz + d bdc d ad − bc = 0ddd c+ = z = cd c=0 f(z) = d c=0 cz cz cz cz ++ + + daz ddd cz + d daz d podem se== f(z) f(z)== garante que aa b bc d ce d não ad ad −− bcbc=ser = 0 0simultaneamente ccz = c = 0 0d z = z =nulos. cAlém = c= 0 0disso, f(z) f(z) c= c= 00 + d cc az + b czcz ++ dd d d − bc = 0 c = 0, a função z = d c=0 f(z) = c=0 c az + b az + az + b db abcd ad − bc = 0 c = 0 z = f(z) = abcd ad − bc = 0 c = 0 z = d f(z) = c=0 f(z) = c=0 c cz + d cz + d d +b az + b az + b d az + b az + b az + b fig. 1 d para tal enquanto f(z)a=b está c d definida ad − ab bc c= d 0todof(z) ad c = − =bc 0que = 0z = cc, a = b0cc = d 0z =que, ad f(z) −sebc =c = 0 , como cf(z) = c0= = 0 z = d c c==0 0 f(z) = c=0 c c az + b az + b az + b +d cz + d cz + d d d d d nulo e a b c d f(z) ad = − bc = 0, temos a bc c=d0não ad z =−d bc = 0 c = 0 c = 0 f(z) = z = c = c 0 = 0 f(z) = c = 0 c � a c az + b cz + d dc az + b d d multiplicando ca = matriz f(z) = abcd ad − bc = 0 Ou c =seja, 0 podemos z = c obter c =o0valor f(z),= 0 linha z 1 = az + b b d cz + d d d , pela matriz c=0 bc = 0 c = 0 z = c c=0 f(z) = � a c � az + b d z 1 , = az + b cz + d f(z) = f az + b az + b az + b b d cz + d d 0 = d implica que está definida para todo complexo . Pode ser provado c = 0 z =o que c = 0 f(z) = c = 0 f(z) = a b c d ad − bc = 0 c = z c = 0 f(z) = c = 0 c c� � a c az + b az + b d cz + d d az + b d z obtendo 1 é uma dilatações (ou contrações), translações a matriz dividindo o primeiro c = 0 que f(z) = composiçãocde =rotações, 0 = az + b cz + d e, depois, f(z) = f(z) elemento 2×2 c b d d cz + d cz + d e inversões. No caso geral, esse resultado está provado no Fechamento desta matriz pelo segundo elemento, chegando a deste guia. � a c � az + b az + b z 1 cuja No experimento são analisadas as Transformações de Möbius . = az + b cz + d f(z) = f(z) 2×2 z1 z2 z3 z1 = f(z1 az + b az + b b d cz + d cz + d constante complexa a zero. f(z) = a b c éd igualad − bcAssim, = 0 a transformação c = 0 z = d c=0 f(z) = c=0 cestá definida cz + d d para todo número complexo e, em particular, ela está definida para todos os pontos de um triângulo e para seus pontos interiores. Além disso, neste az + b Definição d transforma um triângulo bc = 0 ccaso, = 0 pode z =ser c = 0que f(z) = c = 0 em outro cujos c provado d vértices são as imagens dos vértices do triângulo inicial. Usaremos essa Dizemos que a matriz � a c � az + b az + b az + b d z 1 característica de0Möbius que c = 0 paraf(z) investigar )= a b c d das adTransformações − bc = 0 c = z =em = c=0 = az + b cz + d f(z) = c b d cz + d d cz + d seus comportamentos. az + b az + b associada de Möbius , dada f(z) = a b c d é uma admatriz − bc = 0 c =à 0Transformação z = d c= 0 f(z) = por c=0 c cz + d d az + b , f(z) = cz + d abcd ad − bc = 0 az az az az ++ + + bbbb az + b dddd com aaa ,a ,dd complexas e= f(z) f(z) f(z) f(z) == = = bbf(z) bb c,ccd cd =constantes ad ad ad ad −− − − bc bc bc bc = = = a= 00b 00c dccc= c= = 00ad 00 −zbc zz= z= = = = c= = = 0000 ccc0 c. ccc= cz cz cz cz ++ + + dddd cz + d Transformação de Möbius Guia do professor c = 0 az az az ++ + + bbbb d az f(z) f(z) f(z) zf(z) === = = c = 0 ccc= c= c dddd 3 / 19 az + b z) = cz + d az + b Partindo de matrizes 2 × 2 previamente professor, f(z) z1 z2selecionadas z3 z1pelo = f(z z2 = f(z2 ) 1) cz + d z3 = f(z3 ) 1 0 a 0 1 0 Também, comparando d = ±icom a ∈ Rpelos diversos grupos b ∈ C as conclusões obtidas 0 d 0 1 b 1 o aluno investigará qual o comportamento geométrico da transformação relação a estas matrizes, pode ser observado que: 0=zero bb=real correspondente. Isso será feito da forma descrita a seguir. se= 1.b = , b= é, a |b| parte e= b bb1b= + +12bi+2 ib b= 0 0=e0 b b= b= 0, 0isto = 0|b| |b| b = 0 0diferente = 0b2b= b= 0de 0 z z = z1 + 1=+ 2i12i + 2iz 1b 2 ib 2 azaz + b+az b+ b azaz + b+az b+ b 12 10 101 1 01 a a0 0a1 10 1 1 1101 011 0 2 2 2 +cz d + df(z) escolhidos que igual a zero, se desloca d =d ±i = d±i= ±i a ∈aRhorizontalmente, ∈a f(z) =f(z) = Devem = serf(z) f(z)f(z) três números 2 ×22×complexos 2 ×z21 z1 zz12, z2 ezz23 ztais R∈ R z31 z=1suas f(z =z1f(z ) 1f(z ) 1z)2 z=2 f(z =z2f(z ) 2f(z ) 2z)3az=3parte f(z =z3f(z )imaginária ) 3) b ∈bC∈ob Ctriângulo ∈C 3 z 1= 2= 3= 3f(z 0 0d d0 d 0 01 10 1 b b1 1b 1 cz cz + d+cz d+ d cz cz + d+cz d+ d representações no plano complexo formam os vértices de um triângulo. para a esquerda a2direita, b ou = bpara i buma b2 =igual 0 a |b|; b1 = 0 b2 = 0 1 +b 1 = 0distância b|b| b=b i0, b=0= zé, i0 b2.bb=se0= Para uma dada matriz, utilizando a expressão matricial da transformação e b02bb um imaginário o+2triângulo b =bb=1 b+1b+2 ib2bi=bb11b = + 0b= =b00 =b |b| + b|b|0= =12 0= = b, isto 00= 0bz=é1 = |b| +012i + 2ibz1z= = 012puro, + 2=+ 2i2b 3i 3i =z02z= = 23z+ 3= 3i = 32i + 1+ 2i2i z3b 2z 3z 1+ az az + b+az b+b a 1a02 0a2 1 0 1 1 1 120 011 210 1 10 101 2 0 2 12 = f(z )= f(z ), = f(z )= f(z ) = f(z )= correspondente, valores e , se desloca na vertical; a ∈ a ∈ a ∈ d = d ±i = d ±i = ±i (z) 2 ×22× 2 ×z21 z1 calculam-se z12 z2 z23 zos C C C R R R z z = z f(z ) z z = z f(z ) z z = z f(z f(z ) ) b ∈ b ∈ b ∈ 3 3 1 1 11 1 12 2 22 2 23 3 33 3 3 b b1 1 0 01 10 1 0 0d d0 d b 1 cz + czd+cz d+d que também definem um triângulo no plano complexo. Analisando visualse b = b 1 + b2 i b1 = 0 3. bse = b0= b1b+1 |b| b +2bi 2 i ,bb b= 0 0e bb b= 0, o0 triângulo z1|b|= |b|1 +b2i b= = 0 z02 =b22bnas + = = 0 duas 0 zz13z= = 13+ + 1 2i + 2i2i 2b= 1 1= 10= 2 2= 20= 1 1desloca 2 3i 1= mente o triângulo inicial e o triângulo obtido pela transformação, o aluno direções. deve descobrir qual movimento leva um triângulo ao outro. Nesta etapa, as transformações envolvidas são: translação, dilatação (ou contração) Além disso, pode ser observado em todos os casos que as medidas dos e rotação. Ademais, não serão utilizadas matrizes que resultam em comlados e as medidas dos ângulos são mantidas, isto é, o triângulo inicial e o transformado são congruentes. posição desses movimentos. Assim, será fácil identificar o movimento visualmente. Cada grupo de alunos receberá matrizes, temos: b= btrês = bb = + b= i+ b ib+ b ib12b= i1 = b 0que b10uma b=2b0= = b 0 20= b20|b| =|b| 0 |b|b1|b| b= b 0 10= b10b=2b0= b 0Exemplo: b20z= 01Para = 1z1+1= z2i +112i =+12i+ z22i z= 2z2+2= z3i +223i =+23i+ z,33i z= 3z3+3= z2i +332i =+e32i+ b= 2i b= 2b+2= 2i +b2,2i =+ 22i+ 2i 1b+ 1bb 21b 21 2sendo 10= 2resulta 1= 2 = 20= 1z= 2, = 3= em uma translação, outra em uma dilatação (ou contração) e outra corres� 1 0 � ��� 1 11 0 00� �� = 22++2i zj 1 zj zz1jzj+ 12i jj,= ,.,222,,3+ 3z2i == zz2jj+ pondendo a uma rotação. As matrizes, nesta etapa, são dos seguintes ,j= − − jz− = 1z,z2j2j+ ,+ 32i zj =11f(z = 2= z,j131+ zj1f(z )f(z =jj3z))j+ +4i j 211+ 2i 1 j−+ j) 1 jj= j =zzf(z 2 2 + + 2i 2i 1 1 2 + 2i 1 2 + 2i 1 tipos: � � � 1 101 0� 0 � � )= z= = z= = = zj 1zjzj 1 1 2+ 21+ 2i2i 1 1j = 1,jEntão, − zj−+−2zj+z+j2i+ 1, 12, 23z, j3 = f(z 2=j, 3= z√ =f(z zjj) j+ = ) 2= zj+z+j2i+ 2 .+ 2√+ 2iz2i 3+ 3+ 4iz4i 4+ 4+ 5iz5i z= 5+ 5 Assim, ,3 = z53+ j f(z jz= 1 = z31+ 14i 2 ,= z42+ 25i 34i � 2 + 2i 2 + 2 1 + 2i 2i 1 1 1 0 Translação Dilatação Rotação j = 1 , 2, 3 zj = f(zj ) = zj + 2 + 2i z1 = 3 + 4i z2 = 4 + 5i z3 = 5 + 4i. 2 2 |2 + 2i| = 2 2 2 + 2i − zj + 2 + 2i 1 2 + 2i 1 ou contração 1 0 1 0 a 0 a 0 1 0 1 0 1 0 1 0 a 0 d = ±i d = ±i d = ±i a ∈ a ∈ a ∈ z ) = f(z ) b ∈ C b ∈ C b ∈ C R R R 33 3 d 0 d 0 d 0 1 0 1 0 b b 1 b 1 0 1 1 a 0a 0 a 0 1 01 0 1 0 0 1 0 a ∈ Ra ∈ R, a > a 0∈ R d = ±i d = ±i d = ±i b ∈ Cb ∈ C b ∈ C 0 10 1 0 1 0 d0 d 0 d 1 b 1 Im � TABELA 1 = f(z1 ) = f(z2 ) z’₁ � Translação Para matrizes do tipo z2 z’₂ � z3 = f(z3 ) z₂ � 1 0 , b 1 b∈C a 0 0 1 a∈R com b uma = b1constante + b2 i complexa, b1 = 0 esperamos b2 = 0 que|b|os alunos b1 =percebam 0 b2visual= 0 mente que o movimento realizado é uma translação. 1 0 d = ±i 0 d z1 = 1 + 2i z’₃ z₁ � z₃ � z2 = 2 + 3i� –� � z3 = 3 + 2i � � � b = 2 + 2i � � � Re � –� fig. 2 Transformação de Möbius Guia do professor 4 / 19 √ √ √ √ 4=+ desloca + 4i z1Note z=2 3=que +44i +cada 5i zponto 55i + 4i z3 2= 52√+unidades, 4i |2 +22i|isto 2= 2é, 2|2 = 2i 2 2 jz+ 1 2=+32i 2 z= 3 se √+ 2i|2 + unidades na4direção z1 = 3 + 4i z2 = + 5i doz3vetor = 5 correspondente + 4i 2 2 ao|2número + 2i|√ =complexo 2 2 2 + 2i . √ na = zj + 2 + 2iIsto corresponde z1 = 3 + 4i a umzdeslocamento z3 horizontal = 5 + 4i de 2 unidades, 2 |2 +seguido 2i| = 2 2 2 = 4 + 5i √ √ deslocamento z1 = 3 + 4i de um z2 = 4 + 5i z3na = vertical 5 + 4i de 2 unidades. 2 |2 + 2i| = 2 2 2 + 2i 3 Dilatação ou contração tipo Para matrizes do 2 + 2i Im 2 + 2i � � 1 0 a 0 d = ±i a∈R = f(z3 ) b∈C , 0 d 0 1 1 0 esperamos que os alunos percebam visu0 constante real positiva, com a uma d = ±i a∈R b∈C 0 d é uma dilatação ou uma contração. 0 1que o movimento realizado almente 1 0 b 1 z3 a 1. 0 a > 2. 1 = 1 + 2i Ademais, comparando as conclusões obtidas pelos diversos grupos com ser observado que: relação a matrizes deste tipo, pode 0 a 0 se a > 1, a ∈ 0R< , oatriângulo se dilata, sendo a ∈ oR fator de dilatação. Neste <1 1 0 1 caso, as medidas do triângulo transformado são maiores do que as medidas do triângulo inicial; a 0 Se 0 < a < 1, o triângulo sofre uma contração, sendo a ∈ o fator R de contração. 0 1 Neste caso, as são menores do que as 2do0triângulo � transformado � medidas zj 1 inicial. = 2zj 1 j = 1 , 2, 3 zj = f(zj ) = 2zj a = 2 do triângulo medidas � z₃ � z’₁ z’₂ z₁ � z₂ Re � � –� � � � � � � � –� fig. 3 z1 Rotação Para matrizes do tipo z2 z3 1 0 , 0 d = 2 + 2i = 4 + 2i = 2 + 4i d = ±i 1 0 j =dois 1, 2,casos 3 = f(zj ) =inicial 2zj e oztransformado z2 = 4 + 2i z3 = 2 + 4i com d = ±i , esperamos que os alunos percebam visualmente que o moviNos ozjtriângulo são semelhantes, 1 = 2 + 2i 0 d 0 1 � = 2zj 1 z’₃ � isto é, os ângulos são preservados e as medidas dos lados do triângulo transformado são proporcionais às medidas dos correspondentes lados do triângulo inicial. É importante perceber que a dilatação (ou contração) se dá em relação à origem do plano complexo. mento realizado é uma rotação de 90 graus em torno da origem, no sentido � zj 1 d rotação = −i dez90 1 + iem torno z2 =da4 origem, +i z3 sentido = 2 + 2i � horário para d = i e uma graus no 1= 1 zj 1 d = ipara d = −i. z1 = 1 + i z2 = 4 + i z3 = 2 + 2i anti-horário 0 Também, pode ser observado que as medidas dos lados e as medidas são mantidas, isto é, o triângulo inicial e o transformado são ângulos �� � � 22 020 20 ��0 � � dos = = + 1j 1jj= 2zjj= 2z11j2zcongruentes. =1j1,= = 2z = z11 = = z111= + z+111i 1i =+11i+z1i z22,= = z222= + z+221i 1i =+21i+, z1i z33 = = z311= + z+312i 2i =+.12i +a2i a= =a22,=temos: a2= 2zzjj z11j z1j 1 = ,22,j1 ,3= 3, Pode 21, 3, 2z,zser zproposto f(z zjjf(z ))== =jf(z )2z 2z =jj)2z = zz1j1 = = zque, z+1utilizando 22i 2i =+22i+z2i z22 = = z244transferidor, = + z+242i 2i =+42i+z2i z33 = = z322= + z+324i 4i =+24i+ aos alunos um Exemplo: zSejam Se j2z j3j = jf(z 122= 0 0 1 0 1 0 1 1 meçam o ângulo de rotação. � � 2 02 0 � � 1 01 0 = 2z = j 2z1j 1 , j = 1j ,=2,13,.2, 3 zj =zf(z ) =j )2z=j 2zj z1 =z12 = + 22i+ 2i z2 =z24 = + 42i+ 2i z3 =z32 = + 24i+ 4i d =d±i = ±i z31 = + 12i+ 2i a =a2 = 2 zj z1j 1 3= j =jf(z � � � 1 10 10 0� � � 0 10 1 0 d 0 d d =d z = z−i= z− zj1, temos: z1j z11 = 1 +=i = i=di =di= d−i =d−i = −i z1 = z11= z+11i= +1i +zi2, = z24= z+24i= +4i ,+zi3 = z32d= z+ = = i+.22i +d2iz=j −i Exemplo: Sejam Se 322i 0 0−i 0−i −i j j2 j 1 110 100 0 = 2= 2 , = 4= 4 = 2= 2 2z11j 1j =jj1= = , 2j11, = ,3,22Então, ,1,33, 2,z3j = zzjjf(z = =zjf(z f(z ) = = f(z ) ) 2z = = ) 2z 2z = 2z z z z = z + 2 2i = + + 2 2i 2i + 2i z z z = z + 4 2i = + + 4 2i 2i + 2i z z z = z + 2 4i = + + 2 4i 4i + 4i d = d d ±i = = d ±i ±i = ±i . Assim, , . j jj jj jj j1 11 1 2 22 2 3 33 3 � � 2 1 0 0 � � 0 00d 0dd d z j zj 1 1 = 2z 2,13,. 2, 3zj = f(zj ) = 2zj z1 = 1+ 1+ a 2=+2 2i = j zj1 −i , j = 1j,= d = i z1 = d= −i1i zz12==12++i1i z2z= 4+ i 2i z3 = 3= 0 0 1 −i Transformação de Möbius Guia do professor 5 / 19 Então, pretações geométricas das operações de números complexos, para dizer se zj zz1jj 11 = z= = zzkjk = zj = f(z zzjjj= = )= f(z f(zjj))= =iz izzjj.1 = −1 zz11 = + =i−1 −1+ +zii2 = −1 zz22 = + =4i −1 −1+ +4i 4i z3 = −2 zz33 = + =2i −2 −2 +2i 2i a+ transformação é uma translação, dilatação, contração ou rotação. Além k = iz −i −i −i −i −i disso, pode ser proposto aos alunos que comparem as conclusões obtidas na etapa 1 com as conclusões via análise das formas analíticas. Agora, vamos analisar a relação entre cada tipo de matriz utilizada na etapa 1 e sua correspondente forma analítica, e, principalmente, o que a forma analítica pode nos dizer a respeito do tipo de transformação correspondente. Não é demais lembrar que, dada uma matriz 1 1 z= zkiz= zjkiz=j iz zj1 = z1−1 = z1−1 +=i −1 + i +z2i , = z2−1 = z2−1 +=4i−1 + 4i+, 4i z3 = z3−2 = z3−2 +=2i−2 +. 2i+ 2i Assim, k= −i −i Im � a c � z 1 , = az + b cz + d b d � � � z’₂ � � z’₃ z₃ � � z’₁ –� –� z₂ z₁ � � � Re � � � � � � � � �� desta matriz pelo segundo elemento, chegando a �� � –� z 1 fig. 4 f(z) = az + b cz + d Etapa 2 Explicação das transformações e suas � � formas analíticas z 1 z az + b f cz + d az + b az + b forma correspondente de Möbius , = f(z) = para obter a a b c danalítica ad da − bc = �0 c = 0transformação z = d c= 0 f(z) c � � cz + d d z 1 az + b cz + d devemos multiplicar a matriz linha z 1 pela matriz f(z) � a c � az + b z 1 , = az + b cz + d f(z) = f b d cz + d � � � az + b 1 0 z 1 obtendo z a1matriz az + b cz + d , e depois f(z) =dividir o primeiro elementob ∈ C f( b 1 cz + d abcd � z 1 � az + b cz + d Translação 1 az + b . cz + d 1 0 b 1 b∈C f(z) = z+b 1 az + b correspondente ao primeiro tipo de ad − bc = 0A forma c =analítica 0 z =dad c=0 f(z) = c= 0 ctransformação d matriz da etapa 1, ou seja, f(z) = f(z) = � az + b cz + d az + b f(z) = cz + d 1 0 com b ∈ C , b 1 z+b f(z) = = z+b 1 a 0 f 0 1 1 0 1 Se achar necessário, é possível fazer uma recordação das operações de números complexos e suas interpretações geométricas. é � � � Este conheci- az + b az z+b 1 0 a 0 1 feita nesta z 1 etapa az + seguinte. b cz + d mento é necessário para a análiseza ser e na f(z) = b∈C = z + b. f(z) = = az z=x f(z) = b 1 0 1 cz + d 1 1 destes No FechameNto deste guia, apresentamos um desenvolvimento � � � az + b z+b az 1 0 a 0 z conceitos 1 z 1facilitar.az + b cz + d para Como pela interpretação f(z) = b∈C f(z) = = z + b é um número complexo f(z) = constante, = az z=x + yi z =geométrica r(cos θ + i sen θ) az + b az + b b 1 0 1 cz + d 1 analítica = a b cd daad c =complexos, z = 1ad transformação c = 0 f(z) Esta etapa tem como objetivo mostrar como encontrar a forma soma de números leva cada número f(z) − bc = 0 0 = ccom=0 c � � � � � � az + b ++ bd az d 1 0 azcz 1 0 z+b az +0b az a 0 = az θ) z = zda 1transformação z 1 correspondente z az 1 + b cz z +a1dcada um az += b tipos cz +de d� matrizes dos da plexo no seu transladado por . Assim, a transformação correspondente f(z) f(z) = b ∈ b ∈ C f(z) = = C z + b f(z) = = f(z) z + = b z f(z) = x = + yi = az z = r( cos z = θx++iyi sen b 1 � cz + d � b 1 az0+ 1b1 0 1 1 10 a 0 cz + d 1 1 z+b z 1as inter-z 1 az + b cz +éduma translação número etapa 1. A seguir, a meta é analisar a forma analítica, usando f(z) = dada pelo vetor correspondente b ∈ C aof(z) = complexo = z + b. cz + d Transformação de Möbius b 1 Guia do professor 6 / 19 0 < a < 1 é uma dilatação a > 1e, se 0 < a < 1, a transAssim, se a > 1, a transformação Dilatação e contração az + b transformação correspondente à matriz do tipo formação é uma contração. Além disso, o fator de dilatação ou contração = 0 z = Ad c = 0 f(z) = c = 0 c d 1 que 0 <aadilatação <1 é a.>Note (ou contração) é em relação à origem do plano z+b az 0 a 0 ,f(z) = b∈C f(z) = = z+b = az z = x + yi z = r(cos θ + i sen θ) complexo. 1 0 1 1 1 az 0 Rotação f(z) = com = azuma constante z = x + yireal positiva, z = r(coséθ + i sen θ) 1 1 Na etapa 1 foram investigadas as matrizes do tipo z+b az a 0 = az . z = x + yi z = r(cos θ + i sen θ) C f(z) = = z+b f(z) = z 0 1 1 0 1 1 f(z) = d = −1 f(z) = , d = ±i az 0 d a 0 d O número complexo na forma polar é dado por f(z) = = az z = x + yi z = r( cos θ + i sen θ) 0 1 z z az + b az + b 1 0 1 d az 0 d =−±i f(z) = =correspondente iz= i = cos π sen π A 0forma da f(z) = a b c dcom ad bc. = canalítica = 0 dz= =−1 cf(z) = 0= f(z) 2cà+=i 0 2 ctransformação 0 d f(z) = = az z = x + yi z = r(cos θ + i sen θ), d −i cz + d d 1 matriz 1 xx= rrcos yy= rrsen cos θθ+ iisen ff zqquadr zqquadr x= r=cos cos θ θθe y = r=sen sen θ.θθ azaz az == ar( =ar( ar( cos cos θ+ i+sen sen θ)θ) θ) e,f portanto, zqquadr θ θθ azaz az arar ar θ θθ com Logo, z z z z 1 0 1 0 =os azrθcos = ar( θ ycos =ayθ rtransformação sen = + irsen θ senθ) θ az =az far( = cos ar( zqquadr θcos +número iθsen + i θ) sen θθ) f azf zqquadr zqquadr θ eθ argumento θ az az ar ar θ θ d = ±i édf(z) = ±i= . f(z)d== −1 d f(z) = −1= f(z) = iz= i = leva cada complexo dear módulo 0 d 0 d d −i d −i qquadr sen θy+ θ)= i sen r sen fθ)θθ no zqquadr fnúmero az az=zqquadr ar(complexo ar cosθθ +θi sen az θ de θ) módulo az ar f θ arzqquadr θ θ. Ou seja, az a transar θ e argumento z z π 1 0 x = r cos θ = r sen θ doaz = ar( cos θ + i sen θ)ao ponto f zqquadr az = ar Se dθ= −1, d = ±iθ f(z) f(z) = = iz i = cos π + i sen π 1 z = r(cos θ formação mantém ay inclinação vetor correspondente e 2 2 z z π 0 d 1 0 d −i π2 + i sen θ) o módulo f zqquadr θ por az. ar θ d = ±i f(z) = d = −1 f(z) = = iz . i = cos π + i sen 1 z é multiplicado 2 2 d d −i 2 0 z z z π 1 0 1 z0 π π/f(z) −i = cos 3π/2d+=i ±i sen 3π/Como 2 /2=±i +−1 i senf(z) 2 ,= f(z) =i = cosdπd= = módulo =diz = −1 f(z)π =+ i sen = cos 1i = cos π + izse = seu é ei = o argumento é iz . Sendo 2 2 z z π π 0 d 0 d Im 1 0 d d −i −i 22 π d =±i f(z) = d = −1 f(z) = = iz i = cos π + i sen 1 z = r( cos θ + i sen θ) iz 1r r + θ , pela interpretação geométrica do produto de nú meros 2 z z z −i z z 2 π π 2 π π 1 00 d 1 0 1 0 z d π π π 2 ππ 3π/2 + θ d= ±i = df(z) = ±i = d = −1 f(z) d =f(z) −1 = df(z) ==−1 = iz az= f(z) i= izcos = π i+ = =icos iz senπ +ii=sen cos 1π i1sen z2=complexos, r(cos 1 zθ=+r(i cos sen θθ) z+=i sen r(cos izθ)tem θ +1r i sen iz θ)r 1r, ou iz + r θ 1r, e+argumento θr +πθ/2 + θ. o produto módulo seja, ay ±i d =f(z) 2 2 2 22 + z z π az + b az + b 0 d 0 d 0 d 1 0 d d d −i −i −i 2 2 2 2 2 2π π π π d 3π θi = ar(cos θ)=θo+ponto zqquadr ar d = ±i f(z) = f(z) =d = −1 f(z) izr cos i sen r( cos ifsen θ) iz0 1rθ e argumento raz /2 + +θθ, ao θ /2 + θ leva , de módulo ab= c d x== ad − bc cos 0y= cr sen = 0 θ Logo, z az =a1c=transformação c =θ0+z i=sen f(z) c= 2+ 2 + z dπ 3π az z z π b az + b 0 d 0 d −i 23π 2 cz + d 3π 3π π 3π d π i iz f(z)i = = 2−i i = cos + i sen − iz + θ / 2 + θ / 2 + θ d = ±i f(z) = d = −1 f(z) =d = = = cos + i sen−π 1 z = r( cos θ + i sen θ) iz 1r r + θ ponto , de módulo e argumento . Com isto, concluímos que é = f(z) = a b c d ad − bc = 0 c = 0 z = c = 0 f(z) 2 2 2 c d i 2 cz 2 d −i 2 2 +d d π 2 + θ de3π/2 + a/rotação noθsentido anti-horário e centro na origem. z 3π 3π ar 3π f(z) = = −i − i = cos 3π − iz + Se d = i , 2 + i sen 2 z 3π i 2 2 3π 3π = −i − i = d = i f(z) = cos + i sen . 2 2 z i 2 y z z 1 0 π/2 = +θ = 2+ i sen 3π /2 ,=seui = cos d/= ±i f(z) dπ =/2−1 f(z) iz /2.+iθ= cos π Como −i = cos 3π módulo é+ ei sen o argumento é 3π 2+ z z π π 0 d 1 0 r d −i π π d = ±i f(z) = d = −1 f(z) = = iz i = cos 2 + i sen 2 1 1r r geométrica + θ do produto de Sendo z = r(cos θ + i sen θ), pelaizinterpretação 3π z z z z z π π 0 d 1 0 1 0 d −i 2 3π π 3π π ππ 2 3ππ π f(z) = = −i − i = cos + i sen − iz + θ d = ±i df(z) = ±i= f(z)d== −1 d f(z) = −1=d = if(z) = iz= i = iz i = cos + i sen cos + i sen 1 1 z = r( cos θ z + = i r( sen cos θ) θ + i sen iz θ) 1r iz r 1r, e + rθ +θ números complexos, o produto tem módulo , ou seja, argumento 2 2 2 2 2 2 z z π az + b az 0 d 01 d0 2 2+b d d −i −i i 2 2π π 3π π2 d 2 π / 2 + θ / 2 + θ x = r cos θ y = r sen θ az = ar( cos θ + i sen θ) f zqquadr θ az θ d = ±i f(z) = d = −1 f(z) = = iz i = cos + i sen 1 z = r( cos θ + i sen θ) iz 1r r +arθ . Logo, a transformação leva o ponto , de módulo e argumento f(z) = a b c d ad − bc = 0 c = 0 z = c = 0 f(z) = c = 0 2 c 2 3π 3π 2 zθ 0 d z d πd 1 0 2 czz + d 3π π 3π π Re π−i π 3π π 3π i iz f(z)i = cos=2−i −θ iz , de módulo 22 + 2+ /2r+ θ d = ±i f(z) = d = −1 f(z) = d = = + i sen− 1 2 + i senz/= r(θcos + i/sen θ) iz + θ1r e argumento + θ/2 + θ. Com isto, concluímos , aoθponto 2 i = cos az + b 0 d i 2 π az + b 3π2 −i d 2 2 � ax / 2 + θ / 2 + θ que é a rotação de no sentido anti-horário e centro na origem, que é f(z) =x abcd ad − bc = 0 c = 0 z = d c = 0 f(z) = c = 0 c cz + d d fig. 5 2 + θ de3π/2 + igual πà/rotação noθsentido horário e centro na origem. Transformação de Möbius Guia do professor 7 / 19 Etapa 3 Troca de matrizes x = transformação r cos θ y = rmultiplica sen θ az ar(cos θcomplexo + i sen θ)qualquer f zqquadr θ Esta um=número pelo d b r1 = r1 = número complexo a/d e, ao resultado, o número complexo /d é somado. azaz ++ bb azaz ++ bb aa bb aa a a bab a a a a0 0 f(z) f(z) =uma = transformação adad −− bc bc =Möbius = 0 0 cé= cdefi = 0 0nidaad ad = = 00 f(z) f(z) == = = z+ z+ r= r= |z|θ |z|θ r1r= | || | doθnúmero θ+ θ θ r1rr1 r z+ z+ zz Considerando Lembremos que de por e o argumento 1= 1θ1 θ1complexo 1+ bb d d d dd dd czcz ++ dd d d dd dd dd d b az + b az + b az + b a b az ba + b b a a d a a a ba a b a a az 0 + b az + a 0 a 0 a ad −0bcc==ad 00 = 0cad = 0= 0 ad = 0 f(z) = f(z) = =f(z)z = zb/r+d= |z|θ f(z) = f(z) = f(z)ad =− bc ad=−0, bc = c0= += z + r= = |z|θ r,1r1=r=|=r|z|θ |1 = =θθ||1d1/+ | |θ θ1θ+ rzθ1 r θ1r+ z + r1zr+ z a e| θ1| rr11 = 1 1 rθ d b d b d b d d d dd ddd d d dd d d cz + d cz + d cz + d da d d d az + b az + b a b a a b a az az az az+ + + +bbbb az az az az + + + + b b b b a 0 dd d d complexo 0= a f(z) = 0= c= 0= adf(z) = = z + do número r = |z|θ θ1interpretação θ1 + θ geométrica r1 r z+ com aaaa ,bbbb,ccccd,ddd números complexos . cOcccobjetivo f(z) (z) z) (z)= = = = ad ad ad ad− − − −bc bc bc bc= = = =0000 eccccad = = = =00− 00 bc z= zzz= = = cccc= = =0do 00 0 experimento f(z) f(z) f(z) = = = cccc= = = =00f(z) 00 = o argumento d r1 = | /dd| , pela az + b az + b a b a a b a b d a 0 d d d d d cz + d d cz cz cz cz+ + + +dddd d d d d | θ1 r1 o=θ − bc que devemos = ad = 0com c = 0, o que adsignifi = 0 ca f(z) = = z + do produto r = |z|θbde r1 r= r1zré o número z + complexo z /dnúmeros |1d/+aθ | a/da éf(z) investigar as transformações produto 1a|=complexos, d az + b azcz ++ bd az + b aa 0 ba b 0 d az + b az a + a b b a b a a b a a b a a b a az aza++bb0 az az + + b b d d d d d d a d bc = f(z) 0 = f(z) cconsiderar = 0= ad ad = − 0bc= ad =complexos − 0 bc =c 0= 0aa,bcb f(z) = 0ad =bc = 0 .=Assim, r00=etapa = |z|θ f(z) + | 0=0 θ z 1f(z) +f(z) r ==|z|θ θde r= θ |z|θ r1 = r1c|rc= | 1argumento | θ1 + θz, θcomo r1θrna figura. r1 rz + z+ z é módulo números com er= Assim, estez produto f(z) f(z) = c,= cad dd0= ad−− bc =z0+ 0 cnesta c=f(z) = z z==d=dr ==c|cz== = 00= |θz1+ 1+ 1+ a bd d db d a 0 d cc 1 d d az d d d+ b d a d d dd a db cz + d cz + d az + bcz d dd d a d d czb++ddd dbd f(z) = bc = 0 c=0 ad = 0 f(z) = = az composição + r = da |z|θrotação r1 de = |ângulo | θ1 e a dilatação θ1 + θ derfator z+ z são consideradas matrizesad do−tipo 1r b d d d d d d cz + d d d a b az + b a b a a r1 =b d . a r1 = |d/a| a 0 b dz ad − bc = 0 c=0 ad = 0 f(z) = = z+ r = |z|θ r1 = | | θ1 θ1 + θ r1 r/d z+ a z , b d d d d d d d d az az az+ ++bbb azaz ++ bb az az az+ ++bbb d d azaz ++ bb dd complexos, ezz não nulos. comaaa,bbbcc,cdddnúmeros z) (z) z)= == ad ad ad f(z) − −− f(z) bc bc bc == ==000 csendo cc= ==00a0 a b cb dcz= = d =d ad −ccc− bc = ==bc 00= 0 = 0 0f(z) f(z) f(z) c= c=== 0 0 z = z =c cccc= ==00c0= c= 0 0 f(z) f(z) == c= c= 00 cccad Im d d cz cz cz+ ++ddd czcz ++ dd ddd b Esperamos que os alunos, ao receberem uma matriz do tipo ad − bc = 0 c=0 ad = 0 a 0 , b d f(z) = az + b a b = z+ d d d r = |z|θ az + b az + b analítica transformação f(z) =tenham a iniciativa a b c d de encontrar ad − bc =a0formac = 0 z da = d c=0 f(z) = c cz + d d correspondente. A seguir, utilizando a forma analítica e a interpretação geométrica das operações de números complexos, consigam dizer quais os movimentos envolvidos na transformação. Caso os alunos tenham dificuldade, oriente-os a encontrar a forma analítica e a interpretá-la. a r1 = | | d θ1 θ1 + θ r1 r a b z+ d d a z d c=0 θ + θ₁ z az + b az + b a b a a b a a 0 r = |z|θ r1 =r| | f(z) = ad − bc = 0 c=0 ad = 0 f(z) = = z+ θ1 θ1 + θ r1 r z+ z Forma da transformação associada à matriz b d cz +analítica d d d d d d d d az + b Re θ correspondente acmatriz ad − bc = 0A forma c =analítica 0 z =dad c=0 f(z) = =0 ctransformação d � b b az + b a a a b a a 0 fig. 6 ad − bc = 0 c=0 ad = 0 f(z) = = z+ r = |z|θ r1 = | | θ θ1 + θ r1 r z+ z , 1 b d d d d d d d d az + b az + b Agora, pela interpretação geométrica da soma de números complexos, acom b c d um número ad − bccomplexo = 0 cnão = 0nulo,zé= d c=0 f(z) = c=0 c cz + d d a soma b b a +b az + ba 0a az + b a ab a a b a a a 0 = z + .f(z) r== |z|θ = r1 z=+| | z+ z rθ1= |z|θθ1 +rθ1 = | r1| r θ1 z + θ1 + θ z r1 r c = 0 adad − = bc0= 0 c=0 ad f(z) = = 0 b d b d d d d d d d +d d d dd d d d d d a r1 complexo d b/adtransladar r1 = o número corresponde d = | /a| a/dd z pelo avetor correspona r1 = r1 = |d/a| dente ao complexo b/d. dz a Transformação de Möbius Guia do professor 8 / 19 b d Se b = 0, temos= 0 e três possibilidades: 1. se b=0 a d b=0 b =0 d b = 0 b =0 d a =1 b d b = 0 0 = d b =0 d a d a > 1, b =00< d b <= 10 d a =1 d a transformação é a composição de uma rotação e de uma dilatação, podendo ser simplesmente uma dilatação se a/d for um número real positivo; 2. se a a b b = 0 b=0 > 1= 0 0 < < 1, b = 0 =1 d 0 d d a =1 d b=0 a transformação é a composição de uma rotação, uma contração e de uma translação, podendo ser a composição de uma contração e uma translação se a/d for um número real positivo; 3. se a b b a =0 b = 0 = 0 = 1, d d d d a transformação é a composição de uma rotação e de uma translação. E, se também a/d for igual a 1, a transformação é simplesmente uma translação. Exemplo: Seja a matriz d −2 + 6i 0 . 6 + 8i 1 + i a = −2 + 6i b = 6 + 8i d= a transformação é a composição de uma rotação e de uma contração, −2−2 + 6i −2 + −26i + +6i 06i 0 00 a =a−2 =aa−2 = + =6i −2 + −26i + +6i 6i b ,=b6=b + b6= 8i = +668i + +e8i 8i d =d1=d + d1= i= + 1i+ +ad iique ad = ad 0= ad0= =0z0.1Primeiro z=1 1z= z1+ i= +11i+ +zii2 z=2 3z= z2+ podendo ser simplesmente uma contração se /d for um número real Nesteacaso, . 1Note 11= 2 az + b az + b 6 +68i +668i + +18i 8i +1i+11i+ +ii positivo; vamos transformação associada a esta matriz em f(z) = abcd ad − bc = visualizar 0 c = o0 efeito z =dad c = 0 f(z) = c = 0 c cz + d d 3. se um triângulo e, em seguida, vamos encontrar e analisar a forma analítica b b a az + b az + b a 1,= =0 b = 0 = 0 correspondente. abcd ad − bc = 0 c = 0 z =dad c=0 f(z) = c=0 =f(z) ctransformação +−2 + 6i6i+d6i 0 0 0 cz + d d d −2−2 d d a= a= −2 a−2 = +−2 + 6i6i+ 6ib = b= 6b+ 6=+ 8i68i+ 8id = d= 1d+ 1=+ i 1i + iadad =ad = 0 0=Sejam 0z1z= 1z1+ 1=+ i 1i + iz,2z= 3z2+ 3=+ i 3i + 1z3+ 1=+ 2i12i 2i e iz3z= .+ Temos: 1= 2= 3= 6+ 6+ 8i68i+ 8i 1+ 1+ i 1i + i a transformação é uma rotação, podendo ser a identidade se, também, � � −2 + −26i+ 6i 0 0 � � a/d for igual a 1. zj z1j 1 + 6i)z + 6i)z 8i+ 8i 1 + 1i + i , j = 1j ,=2,13, .2, 3 = (−2 = (−2 j + 6j + 6 a b Se b = 0, temos =0 b d d a b=0 =0 d d e três possibilidades: 1. se b=0 a =1 b d 0 = b = 0 d b =0 d 6 + 68i+ 8i1 + 1 + 1 a =1 d a > 1, b =00< d Então, zj = f(zj ) = (−2 + 6i)zj + 6 + 8i . 1+i z1 = 5 + 7i a (−2(−2 + 6i)z (−2 + 6i)z +j68i + +68i+ 8i b j++6i)z j6+ 1=jf(z <= 1 0 zj =zjf(z = f(z )= ) =j ) = + z2i , = z29= z+2915i = +915i + ,15i z3 = z31= z+319i = +. 19i+ z9i1 = z11= z+11i= +1i +z2i = z23= z+23i= +3i +z3i = z31= z1 = z15= z+157= Assim, z= i 57i+ 7 j d d 1 +1i +1i + i a transformação é a composição de uma rotação, uma dilatação e uma translação, podendo ser a composição de uma dilatação e uma translação se a/d for um número real positivo; 2. se a a b b = 0 b=0 > 1= 0 0 < < 1, b = 0 =1 d d z2 = 9 + 15 d Transformação de Möbius d Guia do professor 9 / 19 w v Logo, Im a a b b −2−2 + 61 + 61 6 +6 8i + 8i s f(z) f(z) = = z +z + = = z +z + == (2(2 + 4i)z + 4i)z + (7 + (7 + i) + i) 1 +1 i+ i d d d d 1 +1 i+ i z’₂ �� a au bb + 4i e s+u= = 7 +7 i+. i == 2 +2 4i dd dd aa z= z= (2(2 + 4i)z + 4i)z θ1θ= arg arg 2 +2 1= dd Pela interpretação geométrica do produto de números complexos, o produto �� f(z) = a b −2 + 61 6 + 8i z+ = z+ = (2 + 4i)z + (7 + i) d 1+i 1+i d a = 2 + 4i d �� a b � −2 + 61 6 + 8i z+ = z+ = (2 + 4i)z + (7 + i) d 1+i 1 + i z’₁ d a = 2 + 4i d b = 7+i d a z = (2 + 4i)z d � θ1 = arg 2 + 4i Agora, a soma 6 + 8i = (2 + 4i)z� + (7 + i) 1+i a = 2 + 4i d b = 7+i d a z = (2 + 4i)z d θ1 = arg 2 + 4i a = 2 + 4i d b = 7+i dz₁ � θ1 = arg 2 + 4i a √ r1 = = |2 + 4i| = 2 5 d a √ r1 = = |2 + 4i| = 2 5 . d a r1 = = |2 + 4 d b a z + = (2 + 4i)z + (7 + i) d d a b z + = (2 + 4i)z + (7 + i) d d a z = (2 + 4i)z d corresponde a transladar o número complexo z₃ � a z = (2 + 4i)z d é a composição da rotação de ângulo θ1 = arg (2 + 4i) e a dilatação de fator z’₃ f(z) = b = 7+i d � a z = (2 + 4i)z d z₂ � � Re θ1 = arg 2 + 4i � fig. 7 a √ r1 = = |2 + 4i| = 2 5 d a b z + = (2 + 4i)z + (7 + i) d d a z = (2 + 4i)z d b = 7+i d pelo vetor correspondente ao complexo b = 7+i d b √ = |7 + i| = 5 2 d a b √ √ b a a b a b = |7 + i| = 5 2 = 7 + i = 7 + i z = (2 + 4i)z θ = arg 2 + 4i r = = |2 + 4i| = 2 5 z + = (2 + 4i)z + (7 + i) z = (2 + 4i)z , 1 1 z6j +d8i 6 + 8i d d d d d d d + 7i = + 75i+ 7i zo2 triângulo =z29 = + 15i 9+ 15i z3 =z31pelos = + 9i 1 +vértices 9i z1 =z11 = + i1 + i, z2 =z23 = + i3, + i z3 =z31 = + 2i 1 + 2i z1 =z√ 5 + 7i z2 =z29 = + 15i 9 + 15i z3 =z31 = + 9i 1 + 9i z1 =zVisualizando determinado 15a 15 = b a a b a a b +i = 3++(7 i + i)z3 = 1 +=2i = 5+ + (2 15i+ 9iarg 2vértices 4i)z 2+ = 7i 7 +transformado i z2 = z9 = 4i)zz3 = 1θ+ + 4i r1 = = |2 + 4i| = 2ou5seja, transladar z + = (2 4i)z +e(7sentido + i) do vetor z = (2 + 4i)z =a 7 + i e , e4ioz1 triângulo determinado pelos na+ direção correspondente 1= d d d d d d d d 2i = +12i+ 2i z1 = z15= z+157i = +57i+ 7i z2, = z29= z+2915i = +915i + 15i z31= z+319i = +,19i + 9i , z3 = podemos perceber facilmente que com deslocamento igual a houve pelo menos uma dilatação se houve mais a e uma rotação.√Para ver b √ a b a b = |7 + i| = 5 2 . z = (2 + 4i)zalgumθ1movimento, = arg 2 + 4i r1 = estes + 4i|para = 2 transformar 5 z +um no = (2 + 4i)z + (7 + i) z = (2 + 4i)z = 7+i ou se bastam outro, = |2dois d d d d d d b = |7 + d vamos analisar a forma analítica da transformação. A forma analítica da transformação é f(z) = b −2 + 61 6 + 8i a z+ = z+ = (2 + 4i)z + (7 + i). d d 1+i 1+i Transformação de Möbius a = 2 + 4i d b = 7+i d a z = (2 + 4i)z d θ1 = arg 2 + 4i a √ r1 = = |2 + 4i| = 2 5 d Guia do professor 10 / 19 a b z + = (2 d d f(z) = Im az + b cz + d abcd � + �i � ad − bc = 0 az + b correspondente àcmatriz c = 0Portanto, z = ad c=0 f(z) = =0 ctransformação d � −2 + 6i � 0 zj 1 = (−2 + 6i)zj + 6 + 8i 1 + i 6 + 8i 1 + 1 j= é a composição de uma rotação, uma dilatação e uma translação. � Fechamento � � � θ₁ � �+i � � Re � � � � � � � � � fig. 8 Im z’₂ �� translação no sentido e direção do vetor correspondente a � + i A seguir, desenvolveremos alguns conceitos necessários para a realização do experimento. Números Complexos Em um plano com um sistema de coordenadas, um número complexo pode = xvetor z2 = x2 + y 2 i ser representado tanto pelo ponto P(x, y) comoz1pelo inicial 1 + ycom 1 i ponto z1 = x1os + y1 i na origem dos eixos coordenados e ponto final em P(x . O, y) plano em que números complexos são representados é chamado plano complexo ou plano de Argand-Gauss. �� e deslocamento � + i = � � Im �� � z’₃ P(x,y) � dilatação de fato � � z₃ z₁ –�� –�� –�� –�� –� z = x + yi � � θ₁ –�� y z’₁ –� –� –� � � z₂ � Re � � –� fig. 9 Re � x fig. 10 Transformação de Möbius Guia do professor 11 / 19 z1 z2 = x2 + y 2 i x1 + y 1 i A soma de números complexos Im P(x P(x , y), y) z1z= x1x+ +1yi1 i e z2z= x2x+ +2yi.2Ai soma z1z+ +2z= (x(x +2x)2+) (y + (y +2y)i2 )i (x(x + ,y +2y)2 ) z1z− −2z= z1z+ + (−z r 0 0 x= x= r cos rc Considere os números complexos 1= 1y 2= 2y 1z 2= 1+ 1x 1+ 1y 1+ 1x 2x 2 ,1y+ 1y 1z 2= 1 (−z 2 )2 ) r θr θ r y₂ z₂ 2 2xy= z1 + z2P(x = ,(x y) + x z ) + P(x = (y x , y) + + y y i )i z = z x (x = + + x y x + i , y y i + z y = z ) x + + z z y = − i (x z = + z z x + + ) z + (−z = (y (x ) + + y x )i r ) θ + (y (x r + + y 0 x )i , y x + = (x y r cos ) + θ x , z y − y + = z y r = sen ) z θ + z (−z − z z = ) = r( cos z r + θ θ (−z = i sen r ) θ) 0 r θ x r = = r r cos x 0 θ + y = r r rco s= dos números complexos e é defi nida por 1 21 11 12 1 21 1 212 21 2 2 12 212 21 1 12 2 1 21 22 11 22 1 2 1 2 11 22 1 1 22 1 2 z 2 = x2 + y 2 i (x1 + x2 , y1 + y2 ) z1 + z2 = (x1 + x2 ) + (y1 + y2 )i . z1 − z2 = z1 + (−z2 ) r0 rθ x = r cos θ y = r sen θ z = r(cos θ = i sen θ) r z₁ y₁ Interpretação geométrica da soma e da diferença de números complexos P(x, y) zDe acordo x1 + ycom z2 = P(x nição, x2, y) +y a 2soma i z1 =z1x+ z2y= dos z2x2=) x+2complexos (y +1y+ z21 = + (x x21, y +1x+ −)iz2 = z(x11++(−z x2 ,2y)1 + yr2θ) zr1−0Rez2 =xz1=+r (−z cos θ2 ) yr=θr senrθ 0 z =xr(=cos rc 1= 1 i a defi 1+ 1 i(xnúmeros 1+ 2 iy2 )i z1 +(x 2 )y+ 2 )(y1 +zy 12 –x₂ x₂ x₁ – x₂ x₁ � + yz21i + z2z= e(xz12+= corresponde x(x x21)++ao y(y ponto )i1 + x(x x2y,2y)1. + Este yz21)ponto, − z2z= − z1zsua + (−z vez, z12+ ) (−zr2 )θ rrθ 0 r x0= r cos x= θ r cosyθ= r sen y= θ r senzθ= r(cos z =θ r( =cos i sen θ= θ)i sen rθ)= xr2=+ y2x2 + yr 2= |z| r = |z a 1+ 2 )1++(y 2 )i 1 + y2(x 2 ,1y+ 1+ 1por 2= corresponde ao vetor cujas componentes são as coordenadas do ponto. número pela + y1 i z2Assim, = x2 +o y z1 + z2 é=representado (x1 + x2 ) + (y y2 )i dos vetores (x1 + x2que , y1repre+ y2 ) z1 − z2 = z1 + (−z2 ) rθ ry₁ x = r cos θ y = r sen θ z = r(cos θ = i sen θ) r= z₁ – z₂ 2i 1 +soma – y₂0 como y) z1 P(x = xsentam ,1y) + y1 i z1 e=zx21,= +xy21+ imostra y2 i z2 a=fi zx1gura. i (x1 + z1x+ (y(x y2x)i (x11++yx22)i, y1 +(x y21)+ x2 ,zy11−+zy ) z1 +z(−z z2) = z1r + θ (−z2r ) 0 r θx = rrcos 0θ xy==rrcos senθθ yz==rr( sen cosθθ = izs 2++zy 2 2= 2 )z+ 2= 1+ 1+ 2 ) + (y 2 2= 1 −2 –y₂ –z₂ Im fig. 12 z₁+z₂ y₁+y₂ O produto e o quociente de números complexos A seguir, vamos apresentar as expressões para as operações produto e quociente de números complexos na forma polar e as interpretações z₂ y₂ geométricas dessas operações. Sejam asrcoordenadas representando , como = x1x+ + y y i i z z = = x x + + y y i i z z + + z z = = (x (x + + x x ) + ) + (y (y + + y y )i )i (x (x + + x x , y , y + + y y ) ) z z − − z z = = z z + + (−z θer θ, y) r 0z01 = x 1= x+ = rpolares y cos r1cos iθ θ do z2yponto = y == xr2sen r+ sen yθ2θi z = z1= r( +r( cos zcos θ== θ(x= i1sen i+sen xθ) ) + (yr1 1 1 1 2 2 2 2 2 2 1 1 2 2 1 1 2 2 1 1 2 2 1 1 2 21 1 2 2 1 1 2 2 1 1 (−z 2 )2 ) rP(x 2 2θ) + y1 i z 2 = x2 + y 2 i z1 + z2 = (x1 + x2 ) + (y1 + y2 )i (x1 + x2 , y1 + y2 ) z1 − z2 = z1 + (−zna r θonde r 0. x = r cos θ y = r sen θ z = r(cos θ = i sen θ) r= 2 )figura, y₁ z₁ Im Re � x₂ x₁ x₁+x₂ fig. 11 z cos Para diferença (yz11++yz22)i= (x1(x +1x+ )x+ y1a1+ +yy22))i z1(x−1 z+2,x=podemos y2fazer: )2 ) z1r − θ z2 =r z1 0+ (−zx2= ). r cos rθ ry = 0r sen θx = r cos zy=θr(cosyθ = ri sen θ θ) zr==r( x2θ+=yi2sen θ) r = |z|r = arg x2 (z) + y2 2obter 2 ,(y 2 ,zy 11++(−z 2 2 oy número soma rdos que repre)i (x1 + xAssim, z1 − z2 é=representado z1 + (−z2 ) pelar θ 0vetores x= r cos θ y = r sen θ z = r(cos θ = i sen θ) r = x + y r = |z| arg (z) 2 , y1 + 2) 2 r x2 e−(−z a rfi gura.xr=r 0cos θ x = yr cos +1 y +2x)2 , y1z+ ysentam z2 = θmostra 0θ = rθsen θ y = rz sen = r(θcos θ z==i sen r(cos θ)θ = irsen = θ)x2 +ry= r= +y |z|2 arg r = (z) |z| arg (z) 1− 2z)2 = zz11+ 2 ),zcomo 1 +r(−z 2) r θ 0 r = |z| Re x fig. 13 Transformação de Möbius Guia do professor 12 / 19 ar 2+ 2 y2 rr= y =y xr= sen r cos sen θ, eθθo znúmero =yzr(=cos rr(complexo sen cos θ= θθi = sen i sen zθ)= pode θ) r(cos r ser =θrescrito ==xi sen x2y θ)+ =r|z|=x2|z|+ arg y2 arg (z) (z) r = |z| arg (z) Im 2 2 2 2 forma polar por x (x= rrcos x20,θy1na +xy = )rrcos sen θ z1θ − zy2z==rzr( sen + cos(−z θθ =2 )izsen = r( θ) r cos θ, com θ= rr=isen 0.xAssim, θ)+xy=rr= cosrθ= x |z| + y = rarg sen r(z) = θ |z| z =arg r( cos (z)θ = i sen θ) r = x2 + y2 z⋅w r = |z| arg (z) 1+ 2= 1 2 + y2 chamado o módulo ou valor absoluto do número complexo . Também, z1 − z2 = z1e+é(−z ) r θ r 0 x = r cos θ y = r sen θ z = r( cos θ = i sen θ) r = x r = |z| arg (z) 2 2 y=)ipor 2(−z 2)arg (z) o2θ) módulo de é22θ) denotado assim, . Oy2ângulo r( xrsen cos cos ) +θθ(y =1i+ sen zyy = = r( )i r sen cos θ r(x == sen z x= ,r( + ycos =x2|z| zθ) + y2z2arg r==z(z) r1= + x|z| + rθ = é|z|chamado r arg 0 (z)x = r cos θ y = r sen θ z = r(cos θ = i sen θ) r = x2 + y2 2 1i + 1y+θr 2 rsen 1, − θr = cosi sen θ θ)yargumento = rrsen = θ x2de+zy= e2 ér(denotado cos rθ == |z|i sen por θ) arg (z).r = x2 + y2 r = |z| arg (z) (−z r02 ) Então 0 xr=θxr= cos rrcos θ θ0, 2 r=θzr1θ+ r r = |z| arg (z) Expressão trigonométrica para o produto de números complexos Para encontrar a expressão do produto dos números complexos z1 z=1 r=1 (rcos θ1θ+1 i+sen i sen θ1θ) 1 ) e z2 z=2 r=2 (rcos θ2θ+2 i+sen i sen θ2θ) 2 ) z1 z· 1z2· z=2 r=1 (rcos θ1θ+1 i+sen i sen θ1θ) 1· r)2· (rcos θ2θ+2 i+sen i sen θ2θ) 2 ) 1 (cos 2 (cos 1 (cos 2 (cos na forma polar, fazemos: sen θ2 ) ) z1 · z2 = r1 (cos θ1 + i sen θ1 ) · r2 (cos θ2 + i sen θ2 ) z1 · z2 = r1 (cos θ1 + i sen θ1 ) · r2 (cos θ2 + i sen θ2 ) sen θ2 ) cos θ2 )] = r=1 r· 1r2· [( r2cos [(cos θ1θcos θ2θ−2 sen − sen θ1θsen θ2θ) 2+) i( +cos i(cos θ1θsen θ2 1 cos 1 sen 1 sen r₁⋅r₂ = r1 · r2 [(cos θ1 cos θ2 − sen θ1 sen θ2 ) + i(cos θ1 sen θ2 + sen θ1 cos θ2 )] = r1 · r2 [(cos θ1 cos θ2 − sen θ1 sen θ2 ) + i(cos θ1 sen θ2 + sen θ1 cos θ2 )] = r1 · r2 [(cos θ1 cos θ2 − sen θ1 sen θ2 ) + i(cos θ1 sen θ2 + sen θ1 cos θ2 )] = r1 · r2 [cos (θ1 + θ2 ) + i sen (θ1 + θ2 )] = r1 · r2 [cos (θ1 + θ2 ) + i sen (θ1 + θ2 )] = r1 · r2 [cos (θ1 + θ2 ) + i sen (θ1 + θ2 )] = r1 · r2 [cos (θ1 + θ2 ) + i sen (θ1 + θ2 )] Produto de números complexos w A expressão para o produto dos números complexos z1 z=1 r=1 (rcos θ1θ+1 i+sen i sen θ1θ) 1 ) e z2 z=2 r=2 (rcos θ2θ+2 i+sen i sen θ2θ) 2 ) z1 z· 1z2· z=2 r=1 (rcos θ1θ+1 i+sen i sen θ1θ) 1· r)2· (rcos θ2θ+2 i+sen i sen θ2θ) 2 ) 1 (cos 2 (cos 1 (cos 2 (cos é θ21(cos senθθ22++isen senθθ12cos ) θ2z)]1 · z2 = =rr11(·cos r2 [θcos (θi 1sen + θ21) + · ri2sen (cos(θ θ21 + iθsen 1+ 2 )] .θ2 ) = r=1 r· 1r2· [( r2cos [(cos θ1θcos θ2θ−2 sen − sen θ1θsen θ2θ) 2+) i( +cos i(cos θ1θsen θ2 1 cos 1 sen 1 sen r₂ θ₂ θ sen θ + sen θ cos θ )] = r1 · r2 [(cos θ1 cos θ2 − sen θ1 sen θ2 ) +θ₁i(+ cos 1 2 1 2 Interpretação geométrica do produto de números complexos Pela expressão para o produto obtemos z θ₂ +sen i sen (θ1(θ+1θ+2 )] θ2 )] |z1|z· z12·|z= =1|z | ·1|z| 2· |z | 2 | e argarg (z1(z· z12·)z2=) arg = arg (z1(z )+ + arg (z2(z ),2 ) z1 z=1 r=1 (rcos θ1 θ+1i+sen i sen θ1 )θ1 ) z2 z=2 r=2 (rcos θ2 θ+2i+sen i sen θ2 )θ2 ) 2 | |z 1 )arg 1 (cos 2 (cos isto é, o módulo do produto é o produto dos módulos e o argumento do produto é a soma dos argumentos. Assim, a representação geométrica do produto é o vetor de comprimento igual ao produto dos comprimentos · · r r [ [ cos cos (θ (θ + +θθ2vetores +iisen sen (θ (θ1representam +θθ22)])] |z|z11e··zz22||e= =cujo |z|z11||·ângulo ·|z|z22|| dearg arg (z (z11··zz22))é= = arg(z (z11))+ +arg arg(z (z22)) que inclinação a arg soma 11 22 11dos 2))+ 1+ arg i sen z1 =ângulos zr21= (cos r2 (θcos iθsen ,+ conforme 1 + (z 2 ) θ1 )dos 1 e+θi2sen 1 ) θ2 )fizgura. 2 = r2 (cos θ2 + i sen θ2 ) Transformação de Möbius = r1 · r2 [cos (θ1 + θ2 ) + i sen (θ1 r₁ θ₁ Re � fig. 14 zz11= =rr11((cos cos θθ11+ +iisen senθθ11)) zz22= =rr22((cos cosθθ22+ +iisen senθθ22)) Guia do professor 13 / 19 == cos r+ r1(θicos (2sen cos +θiθ1sen )+Expressão iθisen sen ) )zr1trigonométrica zz2z22= = θ= + r2(·icos r(sen cos θpara θ22+ (θ )+io1isen + sen θzθ12θ2)·2)+ z)2i= sen zrz1números (θ z·12z+ [= cos = θr21r(θ )] r· 2r+2[cos [θcos |z21)(θ ·(θ +z12i1+ sen |+ = θθ2|z(θ )1)+ |+ ·+ i|zisen θ sen |2 )] (θ (θ11arg ++|z θθ2(z )]·1)]z·2z| 2=)|z|z = arg |z··z2|z2|(z = |e= |1|z )|z1+1| ·|arg |z ·ângulo |z22|(z| 21)· zde arg )inclinação = z(z1(zarg ·r(z z212)(1)cos = )= arg θarg (z +(z (z i1)sen )+arg θarg )z(z(z ) )zr21 (=cos zzr121= θ(= cos re+ r1(θicos (2sen cos )+iθisen sen quociente de complexos cujo é+ aarg ângulos ,+θiθ1sen 1 1 1+ 2 )zθ 2θ 1= 1 2 (· cos 2rr1 2 2 [cos 1· r 2 1· 1 2 1 2 12 11·e 2 2arg 1= 1· z 1diferença 1 2)+ 1dos 12= 2 1 1 1+ 2 )zθ 2 Para encontrar a expressão do quociente dos números complexos conforme figura. z z1 r1 r1 = [cos [cos (θ1(θ−1 θ−2θ) 2+)i+sen i sen (θ1(θ−1 θ−2θ)]2 )] z1 z=1 r=1 (rcos θ1θ+1 i+sen i sen θ1θ) 1 ) e z2 z=2 r=2 (rcos θ2θ+2 i+sen i sen θ2θ),2 ) r2 r=2 0= 0 1 = 1 (cos 2 (cos z2 z2 r2 r2 z1 r1 (cos θ1 + i sen θ1 ) r1 (cos θ1 + i sen θ1 )r2 (cos θ2 − i sen θ2 ) = = z2 r2 (cos θ2 + i sen θ2 r2 (cos θ2 + i sen θ2 )r2 (cos θ2 − i sen θ2 ) − i sen θ2 ) − i sen θ2 ) = (θ1 − θ2 )] (θ2 − θ2 )] = z₁ Im fazemos: r1 · r2 [cos (θ1 − θ2 ) + i sen (θ1 − θ2 )] r2 · r2 [cos (θ2 − θ2 ) + i sen (θ2 − θ2 )] = = r1 · r2 [cos (θ1 − θ2 ) + i sen (θ1 − θ2 )] r2 · r2 [cos (θ2 − θ2 ) + i sen (θ2 − θ2 )]z₂ = r1 [cos (θ1 − θ2 ) + i sen (θ1 − θ2 )] r2 r₂ r1 [cos (θ1 − θ2 ) + i sen (θ1 − θ2 )] r2 r₁ θ₂ r1 [cos (θ1 − θ2 ) + i sen (θ1 − θ2 )] r2 θ₁ � Quociente de números complexos A expressão para o quociente dos números complexos Re θ₁ – θ₂ r₁ r₂ z₁ z₂ fig. 15 z z1 r1 r1 = [cos [cos (θ1(θ−1 θ−2θ) 2+)i+sen i sen (θ1(θ−1 θ−2θ)]2 )] z1 z=1 r=1 (rcos θ1θ+1 i+sen i sen θ1θ) 1 ) e z2 z=2 r=2 (rcos θ2θ+2 i+sen i sen θ2θ),2 ) r2 r=2 0= 0 1 = 1 (cos 2 (cos z z r r 2 2 2 2 r z Como calcular o quociente de números complexos + i sen θ2 ) se r2 = 0 , é 1 = 1 [cos (θ1 − θ2 ) + i sen (θ1 − θ2 )] z1 |z1 | z1 11 + 2i (11 + z r 2z 2r = arg (z1 )de |z2 | = 0 = arg − arg θ1 θ2 z = x + yi é o znúmero = x − yi = O conjugado um (z número complexo 1 1 2 ) (11complexo z |z z 11 + 2i + 2i)(2 + i) 20 + 15i | + i sen θ ) r = 0 = [ cos (θ − θ ) + i sen (θ − θ )] . z2 z2 (2 − 2−i |z2 | 1 1 1 2 1 2 2 2 2 1 = |z = arg (z ) − arg (z ) θ θ z = x + yi z = x − yi = = = 4 + 3i | = 0 arg . Para calcular a divisão de dois números complexos, basta multiz r 2 1 2 1 2 2 z |z |2 z2 2−i (2 − i)(2 + i) 5 2 2 denúmeros complexos Interpretação do quociente z1 |z1geométrica z1 | | = 0 arg Pela expressão para|zo2quociente obtemos = arg (z1 ) − arg (z2 ) = plicar o numerador e o denominador pelo conjugado do denominador. Por exemplo, 11 + 2i (11 + 2i)(2 + i) 20 + 15i = = = 4 + 3i . z2 2−i (2 − i)(2 + i) 5 |z2 | z2 z1 |z1 | 11 + 2i (11 + 2i)(2 + i) 20 + 15i = |z2 | = 0 θ1 θ2 z = x + yi z = x − yi = = = 4+3 z |z | , 2−i (2 − i)(2 + i) 5 2 2 Caso Geral da Transformação de Möbius z1 z1 |z1 | + 15i 11 + 2i (11 + 2i)(2 + i) 20 = do = argquociente (z1 ) − argé (z ) θ1 θdos z = x +eyi z = x − yi = analisaremos o = + 3i quando a matriz associada à se |z2 | = 0 , istoarg é, o módulo o 2quociente Agora, caso geral, = ou4seja, 2 módulos, az + b z2 |z2 | z2 2−i (2 − i)(2 + i) a c 5 a b cd ad − bc = 0 f(z) = transformação f é do tipo z1 |z1 | z 11 + 2i (11 + 2i)(2 + i) 20 + 15i b d cz + d 1 = az + = arg (z1 ) − arg (z2 ). |z2 | = 0 = arg θ1 θ2 z = x + yi z = x − yi = a c = 4 + 3i z |z | abcd ad − bc = 0 f(z) = , z2 2−i (2 − i)(2 + i) f 5 2 2 b d + az az az az ++ + + bbbb az az az az ++ + + bbbb czaz a c ddd f0000 ccquaisquer ad b c d ad − bc = 0 f(z) = com aaa Assim, a representação geométrica do quociente é o vetor de comprimento ,a ,dd números complexos . f(z) f(z) f(z) f(z) == = = bbbb c,ccd cd ad ad ad ad −− − − bc bc bc bc == = = c= c= = = 0000 zzz= zsatisfazendo = = = c c c = c = = = 0 0 0 0 f(z) f(z) f(z) f(z) = = = = c c c= c= cccc b d cz cz cz cz cz ++ + + dddd dddd θ1 θ2 z = x + yi z1 = arg (z1 ) − arg (z2 ) arg z2 z = x − yi igual ao quociente dos comprimentos dos vetores que representam Transformação de Möbius Guia do professor 14 / 19 A forma analítica da transformação é bc − ad 1 d d soma inverte f(z) T c = 0 z z = (z) = z + I(z) = D(z) = ·z 2 a1 dc bc−−ad az + d 1b bc − ad a 1d c 1 1bcz− ad bc d d d1 cad c = 0 z z = f(z) T (z) = z + I(z) = D(z) = · z ad bc==z0+ f(z)I(z) = = . D(z) = = T T1−(z) · z T (z) = + z (T ◦ D ◦ I ◦ T )(z) = (T ◦ D ◦ I) z + = (T ◦ D) · I(z) = D(z) c = 0 z z = f(z) T (z) = z + · z T (z) = +z 1 2 2 1 2 2 2 d z c2 c21 cz +z d c cc22 c2 c c zc c c d c z+ z+ az + b a c c c cd ad − bc = 0 f(z) = A expressão de f pode ser reescrita a dabseguinte forma: b d cz + d multiplica por ad bc − ad a bc − ad d 1 bc − ad(cz + d) + a d − ad 1 1 a bc − + az + bc − ad bc − ad 1 a bc a 1 az + b f(z) T1 (z)f(z) = z= + I(z) = T2 (z) =c += z +(T2 ◦ D ◦ I· ◦ T1 )(z) =(T2 ◦ f(z) D ◦ I) + = (T·2 ◦ D) = T2 · = + c D(z) c= c ·z 2 = z+ d d c z cz + d ccz + d = c c c c=2 c d z+ d c cz + d c c c2 z + z + c z+ c c c c d 1 bc − ad a d 1 a bc − ad az + 1b bc − ad 1 a c + bc −I(z) D(z) = bc −2ad · z T2 (z) = + z (T2 ◦ D ◦ I ◦ T1 )(z) = (T2 ◦ D ◦ I) z + = (T2 ◦ D) f = T2 a b c2d · ad − = ad ad = a bc== 0 + f(z) =· 1 (z) = z 2 d d b d c z (cz + d) + c c c c c c az + + cz + d a bc − ad 1 a bc − ad 1 z + z + z + c c c = + · f(z) = + · = c c c c d cz + d c c c cz + d c2 d z + c z + d 1 bc − ad a d 1 a bc − ad 1 a bc − ad 1 soma z) = z + I(z) = D(z) = ·z T2 (z) = + z (Tc2 ◦ D ◦ I ◦ T1 )(z) = (T2 ◦ D ◦ I) zc+ = (T2 ◦ D) = T2 · = + · = 2 2 2 d d d c z c c c c c c c z+ z+ z+ c c c Então, d a bc − ad 1 a bc − ad 1 a bc − ad 1 f(z) = + · f(z) = + = + · · 2 d c c d d c c c c2 z+ z+ c z+ c c c a a a d d ddd 1 bc − ad ddd 11 1a bc bc − bc − ad − ad ad d 16 f(z)D(z) T= z = adcomplexo f(z) cqualquer T= c1= c(z) 0= 0 z ,+ zcom z z = zbc = zI(z) = = f(z) T1T(z) (z) (z) ==z= + z2+ z + · z fig. I(z) I(z) I(z) T= (z) === D(z) +D(z) zD(z) ==(T = 22◦2D2◦·zI· ◦z· Tz1 )(z) T2T(z) T(z) = (z) =(T=2=◦+D + z+ ◦z I) z (Tz(T + (T ◦2 D ◦2 D ◦◦D I= ◦◦I◦(T T◦I1T2◦)(z) T)(z) )(z) = =(T= (T Assim, se c = 0, paraz um número , f(z) bc − ad a0 = − ad 1 1 2 2 2 2 1◦ 1D) bc − ad d d 1 bc − ad a d 1 12 c c c z z z c a bc − ad c + c c c z a bc − ad c c c1 c c (cz + d) az +c + c c c 1 az + z z =o valor f(z) podeT1ser (z)obtido =bz + seguindo I(z) D(z)c= · z T (z) = + z (T ◦ D ◦ I ◦ T )(z) = (T ◦ D ◦ I) z + = (T ◦ D) = T · o= diagrama: z + c c c 2 2 1 2 2 2 az + · f(z) = + = +c · ca c f(z) = =c = d c z c2 c2 d a bcomposição: c dz + ad − bc = 0 f(z) = z + dLogo, a transformação pela cz + d c c c cz + d cz + d cf 2pode ser obtida zb+ d c z+ cz + c c 1 bc − ad d c d a I(z) = D(z) = c = 0 z z = da translação f(z) T1 (z) = z + ; ·z T2 (z) = + z c z c c c2 bc − ad d d 1 a D(z) = c = 0 z z = f(z) T1 (z) + I(z) = ; ·z T2 (z) = + z (T2 ◦ D ◦ I ◦ T1 )(z = daz inversão z c c c c2 d d 1 bc − ad c = 0 z = e dilatação f(z) (ou T1contração) (z) = z + em relação I(z) = · z; T2 (z) = z da rotação à origem D(z) = c c z c2 bc − ad d d 1 a d c = 0 z z = f(z) T1 (z) = z + I(z) = D(z)= e da2translação ·z T2 (z) = + z . (T2 ◦ D ◦ I ◦ T1 )(z) = (T2 ◦ D ◦ I) z + = (T2 ◦ c c c z c c d a c d z z = a b cf(z) b d c Transformação de Möbius Guia do professor 15 / 19 ad a ad a az +b az + b az + c c (cz + d) aaz + b+ c b c (czd+ d) az + b az + b azaz + az1 + ba az + b f(z) =2. b adb− =bc 0ad ad bc = bc b =a dfracadc f(b Enfim, Se=c dfracadc deve ser nulo e, 0como , concluímos ad − bc = 0 ad = bc c =f(z) 0 = b= dfracadc == 0 = 0, então ad f(z) f(z) ad− bc f(z) = 0 = ad − bc ad== bc cf(z) == 0= f(z) =−não cf(z) = =− bc a c bc d= bc− == 0== c ==0ad= zf(z) = ==c == c0 = 0que b c0.d= adad c cz + b cz + d cz + d bc − ad cz + d ccza+ d bc cz + bd cz + dczz + dc d a a d a − ad bc − ad1 1 azcz ++ b azd+cz b +czd+ d d Assim, 1 1 ad bc a − ad1 1 = T2 2 (cz z)+ =z + z(T2 ◦ (T D2◦◦I D ◦ T◦1I)(z) ◦ T1=)(z) (T2=◦ (T D2◦◦I)D ◦zI) + z += (T2=◦ (T D)2 ◦ D) = T2 · + d) · = + = +2 ·2 · = = = f(z)= f(z) 1 az d d d + bd az + c c c c cc cz + dcz +az d +b b c c c2 d ad c c c = = . f(z) = ad − bc = 0 ad = bc c = 0 b = dfracadc f(z)z= c=0 ad + z+ = z + z=+ z += bc z + f(z) = cz + d d z cz cz + d cz + d c cc c + dc c c ad a az + (cz + d) az + b az + b a c = c bc=− ad b = bc 1 f(z) ad −abc =bc0 − adad −1bc = 0az +ad c = 0 b = dfracadc = = = c=0 ad = bc f(z) = Logo, f(z) é constante. 1 = = f(z). = T2 · a cz + d cz + d cz + d cad cz +· b = + 2 2 d d d c cz + d c (cz + d) a azc+ b z + az + b az + b az + c az + z+ z+ f(z) = adc− bc = 0 ad − bc =f(z) 0 = ad = bc ad c Enfim, =−0bc = b 0 = dfracadc ad − bc = 0, f(z) ad = = bc não =c sendo, = 0 portanto, b==cdfracadc = f(z)c== 0 quando é constante, uma trans c c cz + d cz + d cz + d c cz + cz + b cz + b Portanto, uma transformação de Möbius qualquer pode ser expressa como uma composição de transformações mais simples, a saber: trans lações, rotação, dilatação (ou contração) e inversão. Observação A Transformação de Möbius é definida por formação. Este caso é chamado singular. Circunferências e Transformações de Möbius É fácil perceber que a translação, rotação, dilatação e contração transfor mam uma circunferência em uma circunferência. Por sua vez, a inversão ad a (cz + d) a az + b az + c az + b b 1 ad a ad = bc c = 0 b = dfracadc f(z) = = = c = c=0 ad = bc f(z) = = f(z) = az + (cz + d) a az + b az +cz b+ d z cz + d cz + d c cz + d d c = c ad − bc = 0 ad − bc = 0 ad = bc c= 0 b = dfracadc f(z) = = = c=0 f(z) = , ad ac cz + b cz + d acz + d cz +ad d transforma uma circunferência em uma circunferência ou em uma reta, (cz +b d) az (cz + d) a az + b az az + b az + c az + a+ c az az az az ++ + + bbbb az az az az ++ + + bbbb a c ou c ad = bc dd d + bad f(z) = ad f(z) = ad − bc ad = 0 − bc = ad 0 = bc ad − bc = 0 b ad = dfracadc = bc c = 0 f(z) = b = dfracadc = f(z) = = = = c = = 0 = com aaa,abbbbc,cccd,ddd números complexos . A condição assim como transforma uma reta em uma reta em uma circunferência, f(z) (z) z) (z)== = = ad ad ad ad −− − − bc bc bc bc== = =0000 ccecc== = =0000− bc zzz= z== = 0d c c c c = = = = 0 0 0 0 f(z) f(z) f(z) f(z) = = = c c c c = = = = 0 0 0 0 az + (cz + d) c +b az + b ccccz az + b cz + bd cz + d1 cz cz++dd cz c +d cz + d c cz + b cz cz cz cz ++ + + dddd dddda ad = bc é necessária c = 0 bpara = dfracadc =seja uma = função cconstante. = c c=0 ad =obc = garantir que f(z) não Para = que jáf(z) não=é fácil de=perceberf(z) visualmente levando em consideração cz + d cz + d cz + d c cz + d d z justificar este fato, primeiro é preciso notar que o quociente o experimento desenvolvido. Logo, como uma Transformação de Möbius ad a pode ser expressa por meio de uma composição de translações, (cz + d) rotação, az + b az + c a az + b c ad − bc = 0 ad − bc = 0 ad = bc c = 0 dilatação b = dfracadc = = ela transforma = = c=0 a f(z) = (ou contração)f(z) e inversão, então circunferências cz + b cz + d cz + d cz + d c em circunferências ou retas, assim como transforma retas em retas ou azaz ++ bb azaz +ad + b b ada a d só faz sentido e f(z) define uma função,ase forem simultaneamente circunferências, uma de suas principais propriedades. f(z) == a bb cd ce d não ad ad −− bcbc == 0 0 c = c = 0 0 z = z =d c= c= 0 0 f(z) f(z) =az = +az + co(cz = cque = 0 0constitui d) + d) c c az +az b +b az +az b + b d dc c c c+(cz a a az +az b +b b ad a czcz ++ dd = = c = 0c = 0ad =ad bc= bcf(z) = f(z) = = = f(z f(z) = f(z) = iguais ad −ad bcAssim, − =bc 0 =se0ad −ad bc− =bc 0 , ou = 0seja, ad =ad bc= bcc, temos = 0c+=duas 0b =possi dfracadc b = dfracadcf(z) = f(z) = = = = = a zero. (cz d) a az + b b 1 az + b az + c cz + cz b +b cz + cz d + d cz + cz d + d cz + cz d + d c c cz + cz d +d d bc c = 0 bilidades b = dfracadc = = c = c=0 ad = bc f(z) = e Transformações = f(z)de=Möbius para a função f(z) definida por = Ângulos ad a cz + d d z cz + d cz + d cz + d c É fácil perceber que a translação, rotação, dilatação e contração (cz + d)trans az + b az + c a az + b c = c=0 ad − bc = 0 ad − bc = 0 ad = bc c = 0 bum = ângulo dfracadc f(z) = congruente, = ou seja,= f(z) = : formam em um ângulo preserva ângulos. cz + b cz + d cz + d cz + d c ad a Por sua vez, a inversão (cz + d) a ad az + b b 1 az + b az + ad a = 1. Se c = 0, então , o que implica ad = bc b =b dfracadc f(z) =que = az + c = c (cz + d) = c=0 ad = bc f(z) = = f(z) = a az + b b az + b c cz + d d z1 cz + d cz + dc cz + d c = c=0 ad = bc f(z) = = f(z) = ad = bc c = 0 b = dfracadc f(z) = = = c ad cz + ad z cz + d d cz + d cz + d c (cz + d) a az + b b 1 az + b az + c pode=transformar, = = c = . c=0 ad = bc f(z) = f(z) por = exemplo, um ângulo em dois arcos de circunferências, 0 b = dfracadc f(z) = cz + d ad cz +ad cz + d c cz + d d z como mostra a figura. (cz + d) a az + b az + c az + b b 1 c b = dfracadc = = = = c=0 ad = bc f(z) = = f(z) = Logo, f(z) é constante. cz + d c cz + d d z cz + d cz + d Transformação de Möbius Guia do professor 16 / 19 Neste sentido, dizemos que a inversão também preserva ângulos. E, assim, uma Transformação de Möbius preserva ângulos ou, de outra forma, dizemos que é uma Transformação Conforme. θ Variações θ fig. 17 Definindo o ângulo entre esses arcos como sendo o ângulo entre suas tangentes no ponto de interseção dos arcos, pode ser provado que o ângulo inicial e o ângulo entre os arcos são congruentes. Como uma variação deste experimento, é possível propor aos alunos as seguintes questões: 3++ A,A BeCC, associadas ABC ABC àACB ACB ACB AB AB AB deBA BA BA xx33x+ px px ++ Considerando matrizes A transformação translação, BBC ABC px + qqq de rotação e de translação, respectivamente, analise se as transformações 3+ AB BC CA BA C ABC ABC B ABC ACB ACB ACB ACB AB AB AB BA BA AB BA xx3BA +px px x3 correspondentes aos produtosA eA sãoABC iguais. B CC ABC ACB AB BA 3 3 3 A BCB C ABC ABC ACB ACB AB AB de BA BA + pxpx qq Considerando matrizes AA,B e C, associadas à ACB transformação rotação, ABC AB BA xx x++px ++q+ de translação e de rotação, respectivamente, analise se as transformações 3+ AB BC CA BA C ABC ABC B ABC ACB ACB ACB ACB AB AB AB BA BA AB BA xx3BA +px px x3 correspondentes aos produtosA eA sãoABC iguais. B CC ABC ACB AB BA 3 3 ABC à transformação ACB AB ABde translação BA x xe++ Considerando matrizes AA eB B C,Cassociadas ABC ACB BA pxpx ++ qq de rotação, respectivamente, analise se as transformações correspondentes az + a 3q C CB ABC ACB ACB AB AB AB BA BA BA x3 +x3px +x+ px q +x q=x = x aos produtos A BA e BA são iguais. C ABC ABC ACB ++px cz +c θ ABC ABC θ Proponha aos alunos que mostrem que a translação, dilatação, contração e rotação transformam retas em retas, circunferências em circunferências e que preservam ângulos. az + b azaz ++ b b az + b azaz ++ bb 3+ 3 ABC AA BB CC ACB ABC ABC AB ACB ACB BAAB ABx3 BA +BA px + qx,3xcom + px xpx =+ qq xx ==x =sef(z) = xax =uma = f(z) f(z) ==x3 + px + qx3= x+ Mostre que e+ constantes, reduz fração cz + d czcz ++ dd cz + d czcz ++ dd racional fazendo a substituição ABC ACB AB BA x3 + px + q x= az + b , cz + d x = f(z) = az + b cz + d x3 + px + q = 0 ou seja, usando uma Transformação de Möbius. fig. 18 Transformação de Möbius Guia do professor 17 / 19 A Comentário: a substituição indicada nesta questão, utilizando a Transfor mação de Möbius x3 + px + q x= az + b cz + d x = f(z) = az + b , cz + d Bibliografia x3 + px + q = 0 permite encontrar um algoritmo que fornece as soluções da equação de az + b x = f(z) =terceiro grau x3 + px + q = 0. Este é um exemplo em que a Transformação cz + d de Möbius possibilita transformar um problema em outro mais manipulável. Para uma leitura sobre o assunto, veja [Santos]. J. C. Santos, Transformadas de Möbius e Equações do Terceiro Grau, Bol. Soc. Por. Mat., 2005; E. Capelas de Oliveira e W. A. Rodrigues Jr., Funções Analíticas com Aplicações, Editora Livraria da Física, São Paulo, 2006; G. Ávila, Variáveis Complexas e Aplicações, 3ª edição, editora ltc, Rio de Janeiro, 2000; L. Adauto da J. Medeiros, Introdução às Funções Complexas, Editora McGraw-Hill do Brasil, São Paulo, 1972; R. P. Burns, Groups: A Path to Geometry, Cambridge University, Cambridge, 1987; R. P. Pazos, Visualizando Funções Complexas, III Congresso Internacional de Ensino de Matemática, Canoas (RS), 2005; C. Carathéodory, Conformal Representation, Dover Publications, Inc., New York, 1998. E. L. Lima, P. C. P. Carvalho, E. Wagner, A. C. Morgado. A Matemática do Ensino Médio, Vol. 3, Coleção do Professor de Matemática, (3a Edição). Rio de Janeiro: sbm, 2000. Transformação de Möbius Guia do professor 18 / 19 Ficha técnica Autores Claudina Izepe Rodrigues, Edmundo Capelas de Oliveira, Eliane Quelho Frota Rezende e Maria Lúcia Bontorim de Queiroz Projeto gráfico e ilustrações técnicas Preface Design Universidade Estadual de Campinas Reitor Fernando Ferreira da Costa Vice-Reitor e Pró-Reitor de Pós-Graduação Edgar Salvadori De Decca Revisores Matemática Antonio Carlos do Patricínio Língua Portuguesa Carolina Bonturi Pedagogia Ângela Soligo Matemática Multimídia Coordenador Geral Samuel Rocha de Oliveira Coordenador de Experimentos Leonardo Barichello Instituto de Matemática, Estatística e Computação Científica (imecc – unicamp) Diretor Jayme Vaz Jr. Vice-Diretor Edmundo Capelas de Oliveira licença Esta obra está licenciada sob uma licença Creative Commons Secretaria de Educação a Distância Ministério da Ciência e Tecnologia Ministério da Educação Governo Federal
Baixar