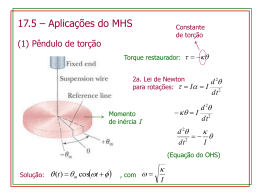
ESTÁTICA – DEC 3674 42 5 Características geométricas da seção transversal1 5.1 Centro de Gravidade de um Corpo Bidimensional. Consideremos uma placa horizontal. Podemos dividir essa placa em n elementos pequenos. As coordenadas do primeiro elemento são denominadas x1 e y1, as do segundo elemento x2 e y2 etc. As forças exercidas sobre os elementos da placa serão denominadas P1, P2, Pn, respectivamente. Essas forças ou pesos podem ser consideradas paralelas. Sua resultante é, por conseguinte, uma única força na mesma direção. A intensidade P desta força é obtida pela adição das intensidades dos pesos elementares. ΣFz = P = P1 + P2 + ... + Pn Para obtermos as coordenadas X e Y do ponto G onde a resultante P deve ser aplicada devemos satisfazer a condição de que os momentos das parcelas Pi em relação aos eixos x e y sejam iguais ao momento da resultante P em relação aos mesmos eixos. ΣMx = PX = P1 x1 + P2 x2 + ... + Pn xn ΣMy = PY = P1 y1 + P2 y2 + ... + Pn yn (5.2) Se aumentarmos o número de elementos em que a placa é dividida e diminuirmos simultaneamente o tamanho de cada elemento, teremos as seguintes expressões P = ∫dP PX = ∫x dP PY = ∫y dP (5.3) Essas expressões definem o peso P e as coordenadas x e y do centro de gravidade G da placa. 5.2 Centróides de Áreas. No caso de uma placa homogênea de espessura uniforme, a intensidade P do peso de um elemento da placa pode ser expressa como: 1 Mecânica vetorial para engenheiros - Ferdinand P. Beer e E. Russell Johnston, Jr.; McGraw-Hill, 1976 ESTÁTICA – DEC 3674 43 P = γ.t.A Sendo: γ = peso específico .(peso por unidade de volume) do material t = espessura da placa, e A = área do elemento Substituindo P e Pi na equação de momentos (5.2) e dividindo por γt, escrevemos ΣMx = AX = A1 x1 + A2 x2 + ... + An xn ΣMy = AY = A1 y1 + A2 y2 + ... + An yn (5.4) Aumentando o número de elementos em que a área A é dividida, obtemos XA = ∫ x.dA AY = ∫ y.dA (5.5) Essas equações definem as coordenadas x e y do centro de gravidade de uma placa uniforme. O ponto de coordenadas X e Y é também conhecido como o centróide C da área A da placa A integral ∫x.dA é conhecida como o momento estático da área A em relação ao eixo y. Analogamente, a integral ∫y.dA define o momento estático de A em relação ao eixo x. Vê-se das Eqs. (5.5) que, se o centróide de uma área está situado sobre um eixo coordenado, o momento estático da área em relação a este eixo é nulo. Áreas simétricas em relação aos eixos Quando uma área A possui um eixo de simetria BB', o centróide da área deve estar situado neste eixo. Se possuir dois eixos de simetria, o centróide da área está situado na intersecção dos dois eixos de simetria. Esta propriedade nos possibilita determinar imediatamente o centróide de áreas tais como círculos, elipses, quadrados, retângulos, triângulos eqüiláteros ou quaisquer outras figuras simétricas. A seguir são fornecidos alguns centróides de formas usuais de áreas: ESTÁTICA – DEC 3674 y Triângulo xCG = 44 yCG = h/3 Área = ½ . b.h C y b/2 b/2 Quarto de círculo C C O y r Área = π.r2/4 yCG = 4.r/3.π Semi círculo xCG =0 O x xCG = 4.r/3.π yCG = 4.r/3.π Área = ½.π.r2. Quarto de elipse b C O C y O x xCG = 4.a/3.π r a Semi elipse xCG =0 Área = π.a.b/4 yCG = 4.b/3.π Área = ½.π.a.b Semi parábola a C O yCG = 4.b/3.π C h y O x xCG = 3.a/8 yCG = 4.h/5 Parabólica xCG =0 Área = 2.a.b/3 yCG = 3.h/5 Área = 4/3.a.h Superfície arqueada de uma abóbada – forma geral a n y = k.x O xcg h xcg = n +1 .a n+2 ycg = n +1 .h 4.n + 2 Área = a.h n +1 ycg 5.3 Placas Compostas. Uma placa pode ser dividida em retângulos, triângulos ou outras das formas usuais. A abscissa X de seu centro de gravidade G pode ser determinada das abscissas dos centros de gravidade das várias partes, expressando que o momento do peso de toda a placa em relação ao eixo y é igual à soma dos momentos dos pesos das várias partes em relação ao mesmo eixo (Fig. 5.9). A coordenada Y do centro de gravidade da placa é encontrada de maneira análoga, equacionando os momentos em relação ao eixo x. ESTÁTICA – DEC 3674 z 45 z y P3 P = ΣPi P1 X O G1 O Y P2 G3 G2 x x FIGURA 5.9. Centro de gravidade de uma placa composta Se a placa é homogênea e de espessura uniforme, o centro de gravidade coincide com o centróide G de sua área. A abscissa X do centróide da área pode ser então determinada, considerando que o momento estático da área composta com respeito ao eixo y é igual à soma dos momentos estáticos das diversas áreas em relação ao mesmo eixo (Fig. 5.10). A ordenada Y do centróide é encontrada de maneira análoga, isto é, equacionando momentos estáticos das áreas em relação ao eixo x. y y A3 Σ Ai C C1 X Y O C3 A1 O x C2 A2 x FIG. 5.10. Centróide de uma área composta ∑M x =Y ( A1 + A2 + ... + An ) = y1. A1 + y2 . A2 + ... + yn . An ∑M y =X ( A1 + A2 + ... + An ) = x1. A1 + x2 . A2 + ... + xn . An (5.8) Cuidado: Momentos estáticos de áreas podem ser positivos ou negativos. Uma área com centróide à esquerda do eixo y terá momento estático negativo em relação ao eixo y. 10 cm r = 10 cm Exemplo 1 5 cm Determinar o centro de gravidade da placa homogênea ao lado. 15 cm 22,5 cm 17,5 cm ESTÁTICA – DEC 3674 4r = 4,24 cm 3π 26,74 cm y C Y = 14,34 cm 5 cm 15 cm 24,24 cm y 46 x 11,25 cm 28,33 cm x X = 15,16 cm X ( A1 + A2 + ... + An ) = x1. A1 + x2 . A2 + ... + xn . An Da equação 5.8: Y ( A1 + A2 + ... + An ) = y1. A1 + y2 . A2 + ... + yn . An Componente A x y x.A y.A 675 11,25 15 7593,75 10125 Quarto de círculo 78,54 26,74 24,24 2100,16 1903,81 triângulo 131,25 28,33 5 3718,71 656,25 13412,62 12685,06 Retângulo 884,79 → X.(884,79) = 13412,62 → X = 15,16 cm → Y.(884,79) = 12685,06 → Y = 14,34 cm y Exemplo 2 r = 15 cm 15 cm Determinar o centróide da área mostrada ao lado. Observe que a área é desconhecida, mas, ela é o complemento da área do quarto de circulo, que tem seu centróide e área x 15 cm conhecidos. Observe também que pela simetria X =Y, assim: y 4r = 6,365 cm 3π y Y 15 cm y 7,5 cm x x 8,635 cm C X x ESTÁTICA – DEC 3674 Componente 47 A x x.A Quadrado 225,0 7,5 1687 Quarto de Círculo - 176,6 8,64 - 1525 Σ A = 48,4 Σ x.A = 162 Da equação 5.8: X ( A1 + A2 + ... + An ) = x1. A1 + x2 . A2 + ... + xn . An X ( ∑ Ai ) = ∑ xi . Ai → X.(48,4) = 162 → X = 3,35 cm Na Tabela anterior que fornece os centróides das figuras planas não consta o trapézio. Determine o centróide do trapézio abaixo b-a b ℓ a b a a ℓ ℓ ℓ 5.4 Determinação do Centróide por Integração. X.A = ∫x dA -Y.A = ∫y dA (5.5) Exemplo 1 dx y Para a área ao lado determinar o momento estático e as coordenadas x do centro de gravidade. h dy Momento estático: Mx = ∫ y dA ∴ y dA = b.dy b A Mx = ∫ y ( bdy ) = h 0 h b ∫ ydy = 0 b. y 2 2 h = 0 b.h 2 2 x ESTÁTICA – DEC 3674 My = ∫ x dA ∴ 48 dA = h.dx A b My = ∫ x ( hdx ) = b h.x 2 = 2 0 h h ∫ xdx = 0 0 h.b 2 2 hb 2 My 2 =b Centro de gravidade X = = 2 A b.h e bh 2 Mx 2 =h = Y= 2 A b.h y u Exemplo 2 dy h Para a área ao lado determinar a coordenada Y do CG. y x Y = Mx / A b h Mx = ∫ y dA dA = u.dy e 0 u h − yu = b h → u= b( h − y ) h ∴ dA = b(h − y ) dy h b( h − y ) ybh − by 2 b Mx = ∫ y. dy = ∫ dy = ∫ ( yh − y 2 ) dy h h h0 0 0 h h h h b ⎡ hy 2 y 3 ⎤ b ⎛ h3 h3 ⎞ b b.h 2 Mx = . ⎢ − ⎥ = . ⎜ − ⎟ = .h 2 = h ⎣ 2 3 ⎦0 h ⎝ 2 3 ⎠ 6 6 Y= y Exemplo 3 y = k.x2 Determinar por integração direta o centróide da figura ao lado Condições de contorno: x = a → y = h → y= Mx b.h 2 6 h = = A b.h 2 3 h 2 .x a2 e x= ∴ h = k.a2 a 1/ 2 .y h1/ 2 a h x3 A= 2. = a 3 0 ∴ dA = y dx y/2 h A = ∫ dA = ∫ y.dx = ∫ 2 .x 2 .dx a h . a3 − 0 ) = 2 ( 3.a x a y Mx e My com o elemento vertical Área: dA = y.dx h h.a 3 3.a 2 ∴ 1 A = a.h 3 y x x a ESTÁTICA – DEC 3674 ⎛ y⎞ Mx = ∫ ⎜ ⎟ . y.dx 2⎠ 0⎝ a 49 a Mx = ∫ ycg ,vert .dA dA = y.dx 0 a 1 ⎡ h2 5 ⎤ Mx = . ⎢ 4 x ⎥ 2 ⎣ 5.a ⎦0 1 h2 4 Mx = .∫ 4 .x .dx 2 0a a h 1 ⎡ h 2 5 ⎤ a.h 2 Mx = . ⎢ 4 a ⎥ = 10 ⎣ a ⎦ 10 ⎛ h ⎞ My = ∫ x. ⎜ 2 .x 2 ⎟ .dx ⎝a ⎠ 0 h My = ∫ xcg ,vert .dA a My = ∫ x. y.dx dA = y.dx 0 0 a 1 ⎡ h ⎤ h.a 2 My = . ⎢ 2 a 4 ⎥ = 4 ⎣a 4 ⎦ ⎡ h ⎤ My = ⎢ 2 x 4 ⎥ ⎣ 4.a ⎦0 a h My = ∫ 2 .x 3 .dx a 0 y Mx e My com o elemento horizontal h Mx = ∫ ycg ,vert .dA 2 1 ⎛ h 2⎞ ⎜ .x ⎟ .dx 2 ∫0 ⎝ a 2 ⎠ a Mx = dA = (a-x) dy h dA = ( a − x ) .dy Mx = ∫ ( y ) . ( a − x ) .dy 0 y 0 a ⎛ ⎞ Mx = ∫ y ⎜ a − 1/ 2 y1/ 2 ⎟ .dy h ⎝ ⎠ 0 (a + x)/2 a ⎛ ⎞ Mx = ∫ ⎜ ya − 1/ 2 y 3/ 2 ⎟ .dy h ⎠ 0⎝ h x x h a h ⎡ ⎤ ⎢ y2 y5 / 2 ⎥ Mx = a ⎢ − 5 1/ 2 ⎥ ⎢2 .h ⎥ ⎣ ⎦0 2 h ⎡ h 2 2.h5/ 2 ⎤ Mx = a. ⎢ − 1/ 2 ⎥ ⎣ 2 5.h ⎦ ⎡ h 2 2.h 2 ⎤ ah 2 Mx = a. ⎢ − = 5 ⎥⎦ 10 ⎣2 dA = ( a − x ) .dy My = ∫ xcg ,horiz .dA 0 ⎛a+x⎞ My = ∫ ⎜ ⎟ . ( a − x ) .dy 2 ⎠ 0⎝ h a2 ⎛ y ⎞ My = ∫ ⎜1 − ⎟ .dy 2 0⎝ h⎠ h 1 2 a − x 2 ) .dy ( 2 0 My = ∫ a2 My = 2 h h ⎡ y2 ⎤ y − ⎢ 2h ⎥⎦ 0 ⎣ My = a2 ⎡ h 2 ⎤ a 2 .h . ⎢h − = 2 ⎣ 2.h ⎥⎦ 4 Posição dos centróides a 2 .h My X= = 4 a.h A 3 X= 3 a 4 ah 2 Mx 10 Y= = a.h A 3 Y= 3 h 10 ESTÁTICA – DEC 3674 50 y Exemplo 3 Para a figura ao lado, calcular a área, os momentos estáticos Mx h e My e a posição do centro de gravidade C. Considerar uma curva parabólica y = h[1- (x2/b2)]. X y C y/2 Y dx x dA = y.dx ( A = ∫ dA = ∫ y.dx = ∫ h 1 − x ∴ 2 b2 x b ) .dx h h ⎛ x2 ⎞ h A = h.∫ ⎜1 − 2 ⎟ .dx = 2 .∫ ( b 2 − x 2 ) .dx b ⎠ b 0 0⎝ ⎤ h ⎡⎛ 2 b 3 ⎞ − − − . b b 0 0 ( ) ⎢ ⎥= ⎜ ⎟ b 2 ⎣⎝ 3⎠ ⎦ b h 2 x3 = A= 2 .b x− b 3 0 b y Mx = ∫ .dA 2 0 b Mx = ∫ dA = y.dx 0 2 b 1 ⎡ ⎛ x2 ⎞⎤ Mx = ∫ ⎢ h ⎜1 − 2 ⎟ ⎥ .dx 2 0 ⎣ ⎝ b ⎠⎦ h2 Mx = 2.b 4 Mx = h 8.b5 ) 4 ( 30.b b My = ∫ x.dA = 0 b → ∴ A= 2.b.h 3 y y.dx 2 1 h2 4 b − 2b 2 x 2 + x 4 ) .dx 4 ( ∫ 20b b Mx = ⎡ 4 2 2 3 x5 ⎤ b x − b x + ⎥ = ⎢ 3 5 ⎦0 ⎣ 2 h ⎛ 3.b3 − b3 ⎞ ⎜ ⎟ b2 ⎝ 3 ⎠ Mx = h 2 ⎛ 4 2 2 3 b5 ⎞ h2 b b − b b + = (15.b5 − 10.b5 + 3.b5 ) ⎜ ⎟ 2.b 4 ⎝ 3 5⎠ 30.b 4 4.b.h 15 4.b.h 2 Mx Y= = 15 2.b.h A 3 2 b ⎛ x2 ⎞ ⎛ x3 ⎞ x h − dx = h x − . 1 ∫0 ⎜⎝ b2 ⎟⎠ ∫0 ⎜⎝ b2 ⎟⎠ dx b ⎛ b2 b4 ⎞ ⎛ b2 ⎞ My = h. ⎜ − 2 ⎟ = h. ⎜ ⎟ ⎝ 2 4.b ⎠ ⎝ 4⎠ My = h.b 2 4 Y= 2 h 5 b ⎡ x2 x4 ⎤ My = h. ⎢ − 2 ⎥ ⎣ 2 4.b ⎦ 0 h.b 2 . My X= = 4 2.b.h A 3 3 X= b 8 ESTÁTICA – DEC 3674 51 Exemplos 2 01 - Determinar o ycg do triângulo com os eixos passando pelo vértice. y dA = x.dy dA b x ∫ y.dA ∫ dA a b = x y ∴ e dA = x.dy dy y x a b ycg = ycg = ∫ y.dA 0 A a y b ∴ a a y2 A = ∫ dA = ∫ y.dy = . b0 b 2 0 b b = x= a ∫ b y. y.dy 0 A b b 0 dA = a y.dy b a b 2 a.b = . = b 2 2 b a 2 y .dy b ∫0 2 y3 = = 2. a.b b 3 2 b 2 ycg = .b 3 0 Determinar o ycg do trapézio abaixo. y y b b a 2 x1 x A1 = b . x1 xcg,1 = 0,5 x1 ycg,1 = 0,5 b A2 = 1/2 b . x2 xcg,2 = 1/3 x2 ycg,1 = 1/3 b xcg = 1 x2 x Σ Ai.xi b.x1. ( 0,5.x1 ) + 0,5.b.x2 . (1 3.x2 + x1 ) 1 2.x12 + 1 2.x1.x2 + 1 6.x22 = = b. ( x1 + 0,5.x2 ) x1 + 1 2.x2 Σ Ai Σ Ai. yi b.x1. ( 0,5.b ) + 0,5.b.x2 . (1 3.b ) 1 2.b 2 .x1 + 1 6.b 2 .x2 1 6.b. ( 3.x1 + x2 ) ycg = = = = b. ( x1 + 0,5.x2 ) b. ( x1 + 0,5.x2 ) x1 + 1 2.x2 Σ Ai Por exemplo: b = 4,0 m, x1 = 7,0 m e x2 = 3,0 m xcg = 4,294 m ycg = 1,882 m ESTÁTICA – DEC 3674 52 02 - Determinar o ycg da seção T abaixo. y h1 h 1 1 3 2 2 2 ou x a b xcg = 0,5 b. A seção é simétrica em relação ao eixo vertical. A = b.h − ( h − h1 ) . ( b − a ) 2 b.h ) . ( 0,5.h ) − ( b − a ) . ( h − h1 ) .0,5. ( h − h1 ) ( 0,5.b.h ) − 0,5. ( b − a ) . ( h − h1 ) ( ycg = = b.h − ( h − h1 ) . ( b − a ) b.h − ( h − h1 ) . ( b − a ) Por exemplo: para b = 150, a = 30, h = 75 e h1 = 15 cm. 2 ycg = 50,83 cm 03 - Determinar o c.g. da seção T abaixo. y y h3 h1 x3 x2 x1 1 h2 3 2 y3 y1 a b d y2 x c x a b c h1 h2 h3 60 30 60 15 75 45 ESTÁTICA – DEC 3674 A.xcg 53 Área xcg ycg A.ycg 1 900 30 67,5 27000 60750 2 2250 75 37,5 168750 84375 3 2700 120 52,5 324000 141750 xcg = 88,846 cm Total 5850 519750 286875 ycg = 49,038 cm 04 - Determinar o c.g. da seção abaixo. 20 40 30 20 60 40 60 05- Determine para a superfície plana da figura: os momentos estáticos em relação aos eixos x e y e a posição do centróide. y 120 mm y y 120 mm 120 mm 80 mm 60 mm O 40 mm O 60 mm O x x 80 mm y y 40 mm xcg = 55 mm ycg = 37 mm x 80 mm 60 mm O 80 mm 60 mm 120 mm O x O 60 mm x ESTÁTICA – DEC 3674 54 5.5 Momentos de Inércia 5.5.1 Momentos de 2º ordem ou Momentos de inércia de Áreas Uma viga bi-apoiada solicitada por dois momentos iguais e opostos aplicados em suas extremidades, está em um estado de solicitação chamado flexão pura. O efeito dessa ação pode ser facilmente visualizado flexionado as duas extremidades de uma régua, ou seja, a régua será flexionada e, sua face inferior será tracionada e a superior comprimida. Na figura abaixo, a região superior (hachurada) é comprimida, a inferior é tracionada e, a linha que separa as duas regiões é chamada de Linha Neutra ou eixo neutro da seção. Compressão A C B Tração Em função da ação externa aplicada têm-se solicitações internas nas seções da viga e, consequentemente, os esforços internos resistentes. Assim, as forças em um lado do eixo neutro são forças de compressão e do outro lado, forças de tração, enquanto que no eixo as forças são nulas. Esses esforços internos resistentes são distribuídos e seus módulos variam linearmente com a distância y a partir da linha neutra. A Figura abaixo mostra o trecho AC da viga AB, e a seção da viga na posição C. y MS,ext A MS,int Compressão C ∆F = k.y.∆A y L.N. y Tração Uma força elementar atuando em uma área elementar é dada por: ∆F = k . y.∆A E o módulo da resultante R das forças elementares ∆F sobre a seção inteira é dada por: R = ∫ k . y.dA = k ∫ y.dA A última integral na expressão da resultante é conhecida como momento de primeira ordem da seção, em relação ao eixo x; e é nula, pois o baricentro da seção está localizado sobre o eixo x, e, portanto Y.A = 0, pois Y= 0. ESTÁTICA – DEC 3674 55 O sistema de forças ∆F reduz-se, portanto, a um conjugado e, o módulo M deste conjugado (momento fletor) deve ser igual à soma dos momentos ∆Mx = y.∆F = k.y2.∆A das forças elementares. Integrando sobre a secção inteira, obtemos: M = ∫ k . y 2 .dA = k ∫ y 2 .dA A última integral na equação acima é conhecida como o momento de segunda ordem ou momento de inércia da seção da viga em relação ao eixo x e é designada por Ix. O momento de segunda ordem é obtido pela multiplicação de cada elemento de área dA pelo quadrado de sua distância ao eixo x, e integrando sobre a secção da viga. Observe que y poderá ser positivo ou negativo, mas essa integral será sempre positiva e diferente de zero. No exemplo da figura acima, para a seção retangular de largura b e altura h, teríamos: y Ix = ∫ y 2 .dA = ∫ y 2 .b.dy dA = b.dy h h b. y 3 b.h3 Ix = ∫ y .b.dy = = 3 0 3 0 h dy 2 e, analogamente: x b b h.x3 h.b3 Iy = ∫ x .h.dx = = 3 0 3 0 b 2 Mudando-se os eixo de forma que passem pelo centróide Ix = ∫ y 2 .dA = ∫ y 2 .b.dy y dA = b.dy h/2 3 dy y x h/2 +h / 2 b. y 3 Ix = ∫ y .b.dy = 3 −h / 2 h/2 2 −h / 2 b ⎛h⎞ b. ⎜ ⎟ b.h3 b.h3 2 = 2. ⎝ ⎠ = 2. = 3 3x8 12 3 +b / 2 Iy = ∫ −b / 2 x 2 .h.dx = h.x 3 3 b/2 −b / 2 ⎛b⎞ h. ⎜ ⎟ h.b3 h.b3 2⎠ ⎝ = 2. = 2. = 3 3 x8 12 ESTÁTICA – DEC 3674 56 Determine o Momento de inércia da seção triangular. y dy h-y u y h u= dA = u.dy dA = x b b (h − y) h b h = u h− y Ix = ∫ y 2 .dA = ∫ y 2 . b(h − y) .dy h b(h − y) b .dy = ∫ ( y 2 .h − y 3 ) .dy h h h b h. y 3 y 4 b ⎡ 4h 4 − 3h 4 ⎤ b.h3 Ix = − = ⎢ ⎥ = 12 h 3 4 0 h ⎣ 12 ⎦ 5.5.2 Momento Polar de inércia da área J O = ∫ r 2 .dA r = distancia do elemento de área até o pólo O. y dA 2 2 2 Observe que r = x + y , portanto também pode ser calculada r através dos momentos retangulares de inércia Ix e Iy. O J O = ∫ r .dA = ∫ ( x + y ) .dA = ∫ x .dA + ∫ y .dA 2 2 2 2 y x 2 A J O = ∫ r 2 .dA = I x + I y Determine o Momento de inércia da seção circular. y y dρ r y ρ x r dα dA = ρ.dα.dρ y = ρ.sen α α x ⎧0 ≤ ρ ≤ r ⎨ ⎩0 ≤ α ≤ 2π Ix = ∫ y 2 .dA = ∫ ( ρ .senα ) .ρ .dα .d ρ 2 2π r Ix = 2π ∫ ∫ ρ .sen α .dα .d ρ = ∫ sen α .dα . 3 2 0 0 Ix = Iy = 2 0 π .r 4 4 ρ4 4 r 0 r 4 α sen2α = − 4 2 4 2π 0 r 4 2π sen4π = . − 4 2 4 x ESTÁTICA – DEC 3674 57 5.5.3 Raio de Giração de uma área Uma determinada área tem um Momento de Inércia Ix em relação ao eixo x. Se concentrarmos esta área em uma faixa estreita, paralela ao eixo x, e com o mesmo momento de inércia Ix, a distancia dessa faixa ao eixo x, é denominada Raio de Giração. y y A A ky O I x = k x2 . A Ix A ∴ kx = Como J O = I x + I y O x analogamente temos ky = Iy A x JO (polar) A kO = e kO2 = k x2 + k y2 5.5.4 Teorema dos Eixos Paralelos. dA yc Na figura ao lado, consideremos conhecido o Momento de Inércia da seção em relação ao eixo x1, Ix1, e queremos A y determinar o Momento de Inércia Ix, em relação ao eixo x, CG d x paralelo a x1. Ix = ∫ y 2 .dA = ∫ ( yc + d1 ) .dA 2 Ix = ∫ ( yc2 + 2. yc .d1 + d12 ) .dA Ix = ∫ yc2 .dA + 2.d1 ∫ yc .dA + d12 ∫ dA Nesta expressão temos: ∫ y .dA = Ix1 = Momento de Inércia em relação ao CG 2.d1 ∫ yc .dA = ∫ y .dA = 0 Momento estático em relação ao CG d12 ∫ dA = ∫ dA = A Área x deslocamento dos eixos ao quadrado 2 c x1 c ESTÁTICA – DEC 3674 Teorema dos eixos paralelos: 58 I x = I x1 + d x2 . A I y = I y1 + d y2 . A Sendo: Ix1 e Iy1 Momentos de inércia em relação ao CG. dx e dy deslocamentos dos eixos x e y, respectivamente A Área da seção Ix e Iy Momentos de inércia em relação aos eixos transladados. 5.5.5 Teorema dos Eixos Paralelos para Momentos de Inércia Polares. Na figura ao lado, consideremos conhecido o Momento de y y1 Inércia da seção em relação aos eixos x1 e y1 passando pelo CG da seção, Ix1 e Iy1 e queremos determinar os Momento de Inércia xc dA d2 em relação ao eixo x e y, paralelos a x1 e x1. x1 ρ J = Ix + I y I x = I x1 + d12 . A yc CG d1 x e I y = I y1 + d 22 . A ρ 2 = d12 + d 22 J1 = I x1 + I y1 J = I x + I y = ( I x1 + d12 . A ) + ( I y1 + d 22 . A ) = I x1 + I y1 + ( d12 + d 22 ) . A = J1 + ρ 2 . A Teorema dos eixos paralelos para Momentos de Inércia Polar. J = J1 + ρ 2 . A J Momento de Inércia Polar em relação à origem dos eixos que passam pelo CG. J1 Momento de Inércia Polar em relação aos eixos transladados. ρ distância entre as origens dos sistemas de eixos considerados. ESTÁTICA – DEC 3674 59 5.5.6 Módulo de Resistência. Veja a seção abaixo. Já vimos que acima da Linha Neutra temos compressão e abaixo, tração. Estas tensões de tração e compressão não são constantes, como já foi visto, elas são nulas na Linha Neutra e aumentam à medida que se afastam em direção às bordas, onde atingem seus valores máximos. σmax. Compr. MS,ext Compressão MS,int A y L.N. C Tração σmax. Tração Admitindo-se uma distribuição linear das tensões, a tensão devida à flexão é dada por: σ= Mf y I Esta equação nos da a tensão ao longo da altura da seção, com y variando entre –h/2 e +h/2, mas, normalmente o que nos interessa é o valor máximo dessa tensão, que ocorrerá nas bordas. Assim obtemos σmax em função de ymax. Como a distância do centróide de uma seção às suas bordas é uma característica da seção, definimos Módulo de Resistência (W) de uma seção como: I W= σ= ymax Mf y I Wx = Ix ymax σ max = e Wy = Mf ymax I Iy unidades : ( L3 ) xmax σ max = Mf W 5.5.7 Módulo de Resistência Polar. De forma análoga, no dimensionamento de peças submetidas à esforços de torção, tem-se o Módulo de Resistência Polar (Wp). Quanto maior o Módulo de Resistência Polar de uma seção, maior a sua resistência à torção. Wp = J0 rmax (unidades : L3 ) ESTÁTICA – DEC 3674 60 Exemplo: Determinar o raio de giração, o módulo de resistência e o módulo de resistência polar, relativos aos eixos baricêntricos x e y, para as seções retangular e circular: C h ix = Ix = A iy = Iy b.h3 2 12 = h b.h 12 x A h.b3 2 12 = b b.h 12 = ix = h h. 3 = 6 2. 3 iy = b b. 3 = 6 2. 3 b I Wx = x = ymax b.h3 J0 = I x + I y = h 12 2 b.h 2 Wx = 6 Wy = Iy xmax = h.b3 b 12 Wy = 2 b.h3 h.b3 b.h 2 + = ( h + b2 ) 12 12 12 2 2 1 2 ⎛b⎞ ⎛h⎞ 2 2 rmax = xmax + ymax = ⎜ ⎟ +⎜ ⎟ = b + h2 2 ⎝2⎠ ⎝2⎠ b.h 2 h + b2 ) ( J0 b.h 2 Wp = = 12 = b + h2 1 2 rmax 6 b + h2 2 ix = i y = y D x Wx = Wy = Ix π .D 4 4 d . = = 2 64 π .D 4 A Ix π .D 4 2 π .D3 . = = 64 D 32 ymax J0 = I x + I y = 2 π .D 4 64 = π .D 4 32 Wp = J 0 π .D 4 2 π .D 3 . = = 32 D 16 rmax h.b 2 6 ESTÁTICA – DEC 3674 61 5.5.8 Produto de Inércia. A integral do produto de cada elemento dA de uma área A por suas coordenadas x e y é conhecida como o produto de inércia da área A em relação aos eixos x e y (Pxy). Pxy = ∫ xy.dA O Produto de Inércia Pxy pode ser positivo ou negativo e, quando um ou ambos os eixos x e y são eixos de simetria da área A, o produto de inércia Pxy é zero. y y A y A A dA x dA x Pxy > 0 Pxy < 0 x Pxy = 0 Teorema dos eixos paralelos para os Produtos de Inércia. y y’ x dA x' X y’ A C C Baricentro x’ e y’ x’ e y’ eixos baricêntricos coordenadas de dA em relação aos eixos baricêntricos x = x’ + X e y x’ Y x y = y’ + Y Pxy = ∫ xy.dA = ∫ ( x '+ X ) . ( y '+ Y ) .dA = ∫ ( x '. y '+ x '.Y + X . y '+ X .Y ) .dA ∫ ( x '. y ') .dA ∫ ( x '.Y ) .dA Px’y’ e ∫ ( X . y ') .dA Momentos estáticos nulos (eixos baricentricos) ∫ ( X .Y ) .dA = X .Y ∫ dA Área Pxy = Px ' y ' + X .Y . A = Px ' y ' + d x .d y . A sendo dx e dy os deslocamentos dos eixos. ESTÁTICA – DEC 3674 62 5.5.9 Rotação de Eixos. Considere um eixo de coordenadas x, y e uma y1 α superfície A. Os Momentos e Produtos de Inércia são: y I x = ∫ y 2 .dA dA x x1 y1 x1 e Ix1y1) através da rotação de um ângulo α, dos eixos x O I xy = ∫ x. y.dA Determinar os Momentos e Produtos de Inércia (Ix1, Iy1 α y I y = ∫ x 2 .dA originais, em torno da origem. Após a rotação: y1 y a = x.cos α b = y.sen α x1 = a + b x1 = x.cos α + y.sen α b a a α α O y1 = a - b y1 = y.cos α - x.sen α dA dA yα α a = y.cos α b = x.sen α y1 y α a x1 b b O x y1 = y.cos α − x.sen α I x1 = ∫ y12 .dA = ∫ ( y.cos α − x.sen α ) .dA = ∫ ( y 2 .cos 2 α − 2.x. y.cos α.sen α + x 2 .sen 2 α ) .dA 2 I x1 = I x .cos 2 α + I y .sen 2 α − 2.I xy .cos α.sen α e, analogamente, obtém-se: I y1 = I x .sen 2 α + I y .cos 2 α + 2.I xy .cos α.sen α I x1 y1 = I x .cos α.sen α − I y .cos α.sen α + I xy . ( cos 2 α − sen 2 α ) Considerando as identidades trigonométricas: sen 2α = 2 . sen α . cos α cos 2 α = 1 + cos 2α 2 cos 2α = cos 2 α − sen 2 α . sen 2 α = 1 − cos 2α 2 x1 b α x x x1 = x.cos α + y.sen α a y x ESTÁTICA – DEC 3674 63 Pode-se escrever as equações da seguinte forma: I x1 = I y1 = Ix + I y 2 Ix + I y I x1 y1 = 2 + − Ix − I y 2 Se somarmos Ix − I y 2 Ix − I y 2 .cos 2α − I xy .sen 2α e, analogamente, obtém-se: .cos 2α + I xy .sen 2α .sen 2α + I xy .cos 2α (I x1 + I y1 ) obteremos I x1 + I y1 = I x + I y Ou seja, quando o giro é sobre a origem, a soma dos Momentos de Inércia em relação a estes eixos é constante e igual ao Momento de Inércia Polar. 5.5.10 Eixos Principais e Momentos Principais de Inércia Eixos Principais de uma área em relação a um ponto O, são aqueles para os quais se tem um Momento de Inércia máximo em relação a um dos eixos e mínimo em relação ao outro. Logo: dI x1 =0 dα Obs. d du sen u = cos u dx dx d du cos u = − sen u dx dx d du tan u = sec 2 u dx dx I −I ⎛I +I ⎞ d ⎜ x y + x y .cos 2α − I xy .sen 2α ⎟ 2 2 dI x1 ⎠ = − I x − I y .2.sen 2α − I .2.cos 2α=0 = ⎝ xy 2 dα dα (I x − I y ) .sen 2α= − I xy .2.cos 2α 2.I xy sen 2α =− Ix − I y cos 2α αp é o valor de α que define os eixos principais. tan 2α p = − 2.I xy Ix − I y ESTÁTICA – DEC 3674 64 Se fizermos: Ix1y1 = 0 I x1 y1 = Ix − I y 2 2.I xy sen 2α = tan 2α = − cos 2α Ix − I y .sen 2α + I xy .cos 2α = 0 Logo o Produto de Inércia é nulo em relação aos eixos principais. Em resumo a) os eixos principais são ortogonais b) Ix1y1 = 0 (um eixo de simetria é sempre um dos eixos principais) c) Ix1 e Iy1 é um máximo e um mínimo. Momentos Principais de Inércia Determinado o valor de αp basta substituir em Ix1 e Iy1 para se obter Imax e Imin.: I x1 = I y1 = Ix + I y 2 Ix + I y 2 + − Ix − I y 2 Ix − I y 2 .cos 2α p − I xy .sen 2α p .cos 2α p + I xy .sen 2α p Ou através da equação: I1,2 = Ix + I y 2 2 ⎛ Ix − I y ⎞ 2 ± ⎜ ⎟ + I xy 2 ⎝ ⎠ onde I1 é o máximo e I2 o mínimo Exemplo 01: Determinar os eixos e momentos principais de inércia da seção abaixo. y 1 Baricentro: 10 2,5 O xcg = 1/ST ΣMy 2,5 x 15 2 e ou 2 1 ycg = 1/ST ΣMx xcg = 1 (150.7,5 − 93, 75.8, 75) = 5, 417 56, 25 ycg = 1 (150.5, 0 − 93, 75.6, 25) = 2,917 56, 25 ESTÁTICA – DEC 3674 y 10 2,5 O 5,417 65 Momentos de Inercia passando pelo CG, ycg paralelos aos eixos x e y 1 ST = 56,25 cm2 xcg 2,917 2 2,5 x 15 b h A x y x.A y.A Ret 01 2,50 10,00 25,00 1,25 5,00 31,25 125,00 Ret 02 12,50 2,50 31,25 8,75 1,25 273,44 39,06 304,69 164,06 Soma xcg = 56,25 ΣM y ΣA = 304, 688 = 5, 417 56, 25 ycg = ΣM x 164, 0625 = = 2,917 56, 25 ΣA A.(y)2 Ix+A.(y)2 Ix y A 1 208,3333 2,08 25,00 108,5069 316,84028 2 16,27604 -1,67 31,25 86,80556 103,0816 Soma (Ix) 419,92188 Iy x A.(x)2 A Iy+A.(x)2 1 13,02083 -4,17 25,00 434,0278 447,04861 2 406,901 31,25 347,2222 754,12326 3,33 Soma (Iy) 1201,1719 Produto de Inércia Ixy A x y A.x. y 1 25,00 -4,17 2,08 -217,014 2 31,25 3,33 -1,67 -173,611 Soma -390,625 Ixy = -390,625 ESTÁTICA – DEC 3674 tan 2α = − 2.I xy Ix − I y Ix + I y I1,2 = 2 =− −781, 25 = −1 −781, 25 2 α = -45 2 ⎛ Ix − I y ⎞ 2 ± ⎜ ⎟ + I xy ⎝ 2 ⎠ 66 = α1 = -22,5º ( −390, 625) + ( −390, 625) 2 810,547 ± α2 = 67,5º 2 Imax = 1362,974 e Imin = 258,1197 Exemplo 02: Determinar os eixos e momentos de inércia da área abaixo: em relação ao eixo YY e em relação ao eixo a-a. Obs. medidas em mm y A1 = b.h = 175 x125 = 21875 Y 50 50 A2 = − 2 50 3 A3 = − π .d 2 16 π .d 2 125 75 1 x 4 16 π .752 a = - 1963,495 = - 4417,865 4 r 175 a =− π .1002 Área Total = 15493,64 X 50 =− Tabelado: __ y x __ x=y= 4.r 3.π A x A.x y A.y 1 21875 87,50 1914062,50 62,50 1367187,50 2 -1963,5 153,78 -301946,32 103,78 -203771,55 3 -4417,86 50,00 -220893,23 75,00 -331339,85 Soma 15493,64 1391222,9 X = 89,79 e 832076,1 Y = 53,7 y y r x 1 Ix = I y = π r4 4 r x y x Ix = I y = 1 π r 4 − A.d 2 16 ESTÁTICA – DEC 3674 67 Solução A - Em relação ao eixo vertical I1 = 55826822,92 I2 = -342990,502 I3 = -1553155,548 I A d A.d2 I+A.d2 1 55826822,92 21875 2,29 114714,6875 55941537,6 2 -342990,502 -1963,5 -63,99 -8039964,115 -8382954,617 3 -1553155,548 -4417,86 39,79 -6994558,172 -8547713,72 Soma 4 39010869,27 4 3901,086927 IY (mm ) IY (cm ) Solução B - Em relação ao eixo horizontal a-a I1 = 28483072,92 I2 = -342990,502 I3 = -1553155,548 I A d A.d2 I+A.d2 1 28483072,92 21875 112,50 276855468,8 305338541,7 2 -342990,502 -1963,5 153,78 -46433305,69 -46776296,19 3 -1553155,548 -4417,86 125,00 -69029135,45 -70582291 Ia-a (mm4) 187979954,5 Ia-a (cm4) 18797,99545 Soma Exemplo 03: Determinar o produto de inércia da seção abaixo em relação ao centróide. y y' X =Y = x' C a 4.a 3.π I xy = I x ' y ' + A. X .Y onde A= π .a 2 4 e a4 I xy = 8 x a4 π .a 2 ⎛ 4.a ⎞ = Ix' y' + .⎜ ⎟ 8 4 ⎝ 3.π ⎠ 2 ∴ Ix' y' = a 4 4.a 4 ⎛ 9.π − 32 ⎞ 4 − = a4.⎜ ⎟ −0, 016471.a 8 9.π ⎝ 72.π ⎠ Observe que as coordenadas do centróide tem sinal, veja: ESTÁTICA – DEC 3674 Segundo quadrante: Ixy = – a4/8, Área > 0, Y > 0 e X < 0 ∴ A X.Y < 0 y y' 68 I x ' y ' +0, 016471.a 4 C x' x a y y' Terceiro quadrante: Ixy = a4/8, Área > 0, Y < 0 e X < 0 ∴ A X.Y > 0 x I x ' y ' −0, 016471.a 4 x' C a y' y Quarto quadrante: Ixy = – a4/8, Área > 0, Y < 0 e X > 0 ∴ A.X.Y < 0 x C x' I x ' y ' +0, 016471.a 4 a Resumindo: y a4 8 = +0, 016471.a 4 I xy = − Ix' y' Ix' y' y' a4 8 = −0, 016471.a 4 I xy = y' x' x' a x y' x' a4 8 = −0, 016471.a 4 x' a4 8 = +0, 016471.a 4 I xy = I xy = − Ix' y' Ix' y' ESTÁTICA – DEC 3674 69 5.5.11 Núcleo Central de Inércia Núcleo Central de Inércia, ou Núcleo Central da Seção, é uma região ao redor do centróide onde aplicando-se uma carga obtém-se, em toda a seção, tensões de mesma natureza da carga aplicada (tração ou compressão). Apenas como exemplo, considere um pilar retangular submetido a uma carga de compressão P, aplicada sobre o eixo horizontal, a uma distância “e” do centróide. Uma outra forma de representar este carregamento excêntrico é através de uma carga centrada P e um momento (P.e), conforme mostrado na figura abaixo. B’ A’ b P A a M = P.e e e P P AA’ BB’ AA’ BB’ B A seção é solicitada por dois esforços combinados, uma compressão axial e uma flexão pura, conforme mostrado na figura abaixo, e as tensões atuantes na seção serão iguais à soma destas tensões. AA’ AA’ BB’ AA’ BB’ BB’ Em função da excentricidade “e” as tensões resultantes na seção: • Excentricidade pequena Seção inteiramente comprimida (não uniforme) • Excentricidade grande Seção comprimida e tracionada ESTÁTICA – DEC 3674 70 O que se busca é o limite entre os dois casos, ou seja, a excentricidade que provoca tensões nulas em uma borda (AA’) e compressão na outra borda (BB’) Compressão axial σ1 = − Flexão pura σ2 = σ = σ1 + σ 2 = − P P =− S a.b M P.e = W b.a 2 6 P 6.P.e P ⎛ 6.e ⎞ ± = ⎜ −1 ± ⎟ 2 b.a b.a b.a ⎝ a ⎠ Borda AA' σ AA ' = P ⎛ 6.e ⎞ ⎜ −1 + ⎟ b.a ⎝ a ⎠ Borda BB' σ BB ' = P ⎛ 6.e ⎞ ⎜ −1 − ⎟ b.a ⎝ a ⎠ A questão se resume em determinar a excentricidade que anula as tensões na borda AA’. σ AA ' = 0 ⇒ −1 + 6.e =0 a ou seja, 6.e =1 a ⇒ e= a 6 e= b 6 Analogamente, para a carga aplicada no outro eixo b/3 b/3 b/3 a/3 a/3 Núcleo Central de Inércia, ou Núcleo Central da Seção, de um retângulo é um paralelogramo de diagonais a/3 e b/3. a/3 Aplicada uma carga P de compressão: • dentro desta região, toda a seção é comprimida. • fora desta região, parte da seção comprimida e parte tracionada. • Nas bordas (nos cantos) compressão numa lateral e tensão nula na outra. O núcleo central de inércia de uma seção qualquer pode ser obtido pelo cociente entre o quadrado do raio de giração e a distância entre o c.g. e a borda. ESTÁTICA – DEC 3674 e= y c e 71 ix2 c Para a seção retangular acima ix = x e= I x b. 3 = A 6 e, c = b / 2 ix2 b 2 .3 1 b . = = 36 0,5.b 6 c Núcleo Central de Inércia de uma seção circular é um círculo de raio r/4. r/4 r ix = Ix = A (1 4.π .r ) = 4 π .r 2 r2 r = 4 2 e, c = r. ix2 r 2 4 r e= = = c r 4 Normalmente encontram-se tabelados, em livros de Resistência dos Materiais, os valores do Núcleo Central de Inércia para as seções mais comuns. ESTÁTICA – DEC 3674 72 Propriedades das Áreas Planas Elementares A = área X, Y = centróide Ix, Iy = Momentos de Inércia Ixy = Produto de Inércia Ip = Ix + Iy = Momento de InérciaPolar IBB = Momento de Inércia em relação ao eixo BB y X h C b h Y= 2 2 b.h 2 IP = ( h + b2 ) 12 A = b.h x Y X= I xy = 0 b y c b.h b+c A= X= 2 3 2 b.h I xy = ( b − 2c ) 72 X h x C Y b c y B b.h3 12 Iy = h.b3 12 h b.h3 b.h 2 Y= Ix = Iy = b − bc + c 2 ) ( 3 36 36 b.h 2 IP = h + b 2 − bc + c 2 ) ( 36 b.h3 b.h Iy = ( 3b2 − 3bc + c 2 ) 12 12 b.h 2 b.h3 I xy = I BB = ( 3b − 2c ) 24 4 B Ix = h x b Ix = y b.h b h b.h3 h.b3 X= Y= Ix = Iy = 2 3 3 36 36 3 2 2 b .h b.h 2 b.h I xy = − IP = h + b2 ) I BB = ( 72 36 12 A= h X C x Y B B b y h A= X C B Y h C b I xy = 0 a Y B b h Y= 2 3 b.h IP = 4h 2 + 3b 2 ) ( 144 X= B b y x b.h 2 A = h. x B Ix = a+b 2 Y = h. ( 2.a + b ) 3. ( a + b ) h3 . ( a 2 + 4.a.b + b 2 ) 36. ( a + b ) b.h3 36 3 b.h I BB = 12 Ix = I BB = h3 . ( 3a + b ) 12 Iy = h.b3 48 ESTÁTICA – DEC 3674 y A = π .r 2 = r C x B I xy = 0 B y r A= C Y B x B π .D 2 Ix = I y = 4 IP = π .r 2 π .r 2 Y= 72.π = π .D π .r 4 4 = 4 32 I BB π .D 4 64 5.π .r 4 5.π .D 4 = = 4 64 4.r 3.π 2 ( 9.π 2 − 64 ) .r 4 Ix = 4 73 ≅ 0,1098.r 4 Iy = π .r 4 8 I xy = 0 I BB = π .r 4 8 y X B O A= C Y r π .r 2 B x I xy = 4 r4 8 4.r π .r 4 Ix = I y = 3.π 16 2 4 ( 9.π − 64 ) .r ≅ 0, 05488.r 4 = 144.π X =Y = I BB I BC = −0, 0165.r 4
Download