PROGRESSÕES
1. PROGRESSÃO ARITMÉTICA
Vamos considerar as seqüências numéricas
a) (2, 4, 6, 8, 10, 12). Veja que a partir do 2º termo a diferença entre cada termo e o seu antecessor, é
constante:
a2 - a1 = 4 - 2= 2; a3 - a2 = 6 - 4 = 2; a5 - a4 = 10 - 8 = 2; a6 - a5 = 12 - 10 = 2
b) (2, 3/2, 1, 1/2, 0, -1/2)
a2 - a1 = 3/2 - 2= -1/2; a3 - a2 = 1 - 3/2 =-1/2; a5 - a4 = 0 - 1/2 = -1/2; a6 - a5 = -1/2 - 0 = -1/2
Quando observamos que essas diferenças entre cada termo e o seu antecessor, é constante, damos o
nome de progressão aritmética (P.A.) À constante damos o nome de razão (r).
Obs.:
r = 0 => P.A. é constante.
r > 0 => P.A. é crescente.
r < 0 => P.A. é decrescente.
De um modo geral temos:
Chama-se de progressão aritmética (P.A.), toda sucessão de números que, a partir do segundo, a
diferença entre cada termo e o seu antecessor é constante. Isto é:
Sucessão: (a1, a2, a3, a4, a5, a6, a7, ..., an, ...)
a2 - a1 = a3 - a2 = a4 - a3 = ...= an - an -1 = r
1.1 – FÓRMULA DO TERMO GERAL DE UMA P.A.
Vamos considerar a seqüência (a1, a2, a3, a4, a5, a6, a7, ..., an) de razão r, podemos escrever:
Somando membro a membro essas n - 1 igualdades, obtemos:
a2 + a3+ a4+...+ an -1 + an = a1+ a2+ a3+ ... an -1+ (n - 1).r
Após a simplificação temos a fórmula do termo geral de uma P.A.:
an = a1 + (n - 1).r
Oliveira
Nota Importante:
Quando procuramos uma P.A. com 3, 4 ou 5 termos, podemos utilizar um recurso bastante útil.
• Para 3 termos: (x, x+r, x+2r) ou (x-r, x, x+r)
• Para 4 termos: (x, x+r, x+2r, x+3r) ou (x-3y, x-y, x+y, x+3y). Onde y = r/2
• Para 5 termos: (x, x+r, x+2r, x+3r, x+4r) ou (x-2r, x-r, x, x+r, x+2r)
Prof. Júlio Oliveira
1.2 – INTERPOLAÇÃO ARITMÉTICA
Interpolar ou inserir k meios aritméticos entre dois números a1 e an, significa obter uma P.A. de k+2
termos, cujos os extremos são a1 e an.
Pode-se dizer que todo problema que envolve interpolação se resume em calcularmos a razão da P.A.
Exemplo 1.1
Veja esta P.A. (1, ..., 10), vamos inserir 8 meios aritméticos, logo a P.A. terá 8+2 termos, onde:
Solução:
81
a1 = 1; an = 10 ; k = 8 e n = k + 2 = 10 termos.
an = a1 + (n-1).r
=> r = 1
a P.A. ficou assim: (1, 2, 3, 4, 5, 6, 7, 8, 9, 10)
1.3 – SOMA DOS n TERMOS DE UMA P.A.(Sn)
Vamos considerar a P.A.
(a1, a2, a3, ..., an-2, an-1, an) (1).
Agora vamos escrevê-la de uma outra forma:
(an, an-1, an-2, ..., a3, a2, a1) (2).
Vamos representar por Sn a soma de todos os membros de (1) e também por Sn a soma de todos os
membros de (2), já que são iguais. Somando (1) + (2), vem:
Sn = a1 + a2 + a3 + ... + an-2 + an-1 + an
Sn = an + an-1 + an-2 +...+ a3 + a2 + a1
2Sn = (a1 + an) + (a2 + an-1) + (a3 + an-2) ... + (an-1 + a2) + (an + a1)
Observe que cada parênteses representa a soma dos extremos da P.A. , portanto representa a soma
de quaisquer termos eqüidistantes dos extremos. Então:
2Sn = (a1 + an) + (a1 + an) + ... +(a1 + an) + (a1 + an)
2Sn = (a1 + an) . n
=>
que é a soma dos n termos de uma P.A.
Exemplo 1.2: Calcular a soma dos 20 primeiros termos da P.A. ( 3, 7, 11,...).
Solução:
a1 = 3; r = 4
[
=>
Exemplo 1.3: Calcule o 17: termo da P.A. ( 3,
]
8, 13, )
Solução:
Temos que:
a1 3 e r 5
Logo,
a17 a1 17 1r a1 16r 3 16 5 83
Exemplo 1.4: Calcule a soma dos doze primeiros números ímpares.
Solução:
Temos então:
( 1, 3, 5, )
Donde,
a1 1 e r 2 , logo
a12 a1 12 1r a1 11r 1 11 2 23
a a 12 1 2312 144
S12 1 12
2
2
Exemplo 1.5: No depósito de uma firma de informática, costuma-se empilhar as caixas de um
determinado equipamento em filas horizontais superpostas, conforme ilustrado na figura. Quantas dessas filas
seriam necessárias para empilhar 171 dessas caixas?
82
Fig. 1.2
Solução:
Temos uma P.A. representada por
( 1, 2, 3, )
onde,
a1 1 e r 1
Desejamos saber o n para o qual temos
Sn 171 .
Sabemos que:
Sn
a1 a n n a1 a1 n 1r n 2a1 n 1 r n
2
2
2
Substituindo valores,
171
2 1 n 1 1n ,
2
342 2 n 1n,
342 1 nn,
342 n 2 n,
n 2 n 342 0
que é uma equação do 2º grau para a qual a 1 , b 1 e c 342 .
Assim sendo,
b b 2 4ac 1 12 4 1 342
n
2a
2 1
1 1369 1 37
2
2
n' 18
n" 19
Como não existe número de fileiras negativo, só a 1ª raiz tem significado físico.
2. PROGRESSÃO GEOMÉTRICA
Chamamos Progressão Geométrica (P.G.) a uma seqüência de números reais, formada por
termos, que a partir do 2º, é igual ao produto do anterior por uma constante q dada, chamada de razão da P.G.
Dada uma seqüência (a1, a2, a3, a4, ..., an,...), então se ela for uma P.G. _an = an-1 . q , com n ≥ 2 e n ϵ
IN, onde:
83
2.1 – CLASSIFICAÇÃO DAS P.G'S.
3. Alternante ou Oscilante: quando q < 0.
4. Constante: quando q = 1
5. Estacionária ou Singular: quando q = 0
2.2 – FÓRMULA DO TERMO GERAL
Vamos considerar uma P.G. (a1, a2, a3, a4,..., an,...). Pela definição temos:
Depois de multiplicarmos os dois membros das igualdades e simplificarmos, vem:
an = a1.q.q.q....q.q => (n-1 fatores q)
Termo Geral da P.G.
2.3 – INTERPOLAÇÃO GEOMÉTRICA
Interpolar, Inserir ou Intercalar m meios geométricos entre dois números reais a e b significa obter uma
P.G. de extremos a e b, com m+2 elementos. Podemos resumir que problemas envolvendo interpolação se
reduzem em calcularmos a razão da P.G.
84
2.4 – SOMA DOS TERMOS DE UMA P.G. FINITA
Dada a P.G. (a1, a2, a3, a4, ..., an-1, an...), de razão q ≠ 0 e q ≠ 1 e a soma Sn de seus n termos pode ser
expressa por:
Sn = a1+a2+a3+a4... +an (Eq.1)
Multiplicando ambos os membros por q, vem:
q.Sn = (a1+a2+a3+a4... +an).q
q.Sn = a1.q+a2.q+a3 +.. +an.q (Eq.2) .
Encontrando a diferença entre a (Eq.2) e a (Eq.1), temos:
com q ≠ 1
ou
Obs.: Se a P.G. for constante, isto é, q = 1 a soma Sn será:
Sn = a1+ a1+ a1+ ...a1 = n. a1
2.5 – SOMA DOS TERMOS DE UMA P.G. INFINITA
Dada a P.G. infinita: (a1, a2, a3, a4, ...), de razão q e S sua soma, devemos analisar 3 casos para
calcularmos a soma S.
1. Se a1= 0 => S = 0, pois an = 0
2. Se q < –1 ou q > 1, isto é |q| > 1 e a1 ≠ 0, S tende a −∞ ou + ∞ . Neste caso é impossível calcular a
soma S dos termos da P.G.
3. Se –1< q < 1, isto é, |q| < 1 e a1 ≠ 0, S converge para um valor finito. Assim a partir da fórmula da
soma dos n termos de uma P.G. , vem:
n
Quando n tende a + ∞ , q tende a zero, logo:
que é a fórmula da soma dos termos de uma P.G. Infinita.
Obs.: S nada mais é do que o limite da Soma dos termos da P.G., quando n tende para + ∞ é
representada desta forma:
Exemplo 2.1: Determine o 10º termo da P.G. (1 , 2 , 4 , )
Solução:
a1 1 e q
Logo,
2
a10 a1q101 a1q9 12 512
9
Exemplo 2.2: Determine a soma dos vinte primeiros termos da P.G. ( 2
2
,
21 , 20 , )
Solução:
Temos:
a1 2 2
21
1 1
e
q
21 2 21 2 2
2
2
2
4
2
Logo,
a 1 q
S20 1
1 q
262 143,75
20
1
1 220
4
1 2
85
Exemplo 2.3: Um barco patrulha está distante 65 milhas de um navio carregado de contrabando de
armas pesadas. Sabendo-se que ambas as embarcações estão seguindo o mesmo rumo (movimentos na
mesma direção e mesmo sentido) e que a velocidade do barco patrulha é o dobro da velocidade do navio,
pede-se calcular a distância que o barco deve percorrer para alcançar o navio.
Solução:
v
v
2
x
0
65 mi
Fig. 1.3
Quando o barco patrulha tiver percorrido as 65 milhas iniciais, o navio terá percorrido
vez que sua velocidade é a metade da do barco. Assim o barco terá que percorrer também
barco tiver percorrido estas últimas milhas, o navio terá percorrido
a distância total a ser percorrida pelo barco é:
milhas. Quando o
milhas, e assim por diante, de modo que
65
65
mi
mi .
2
4
xb 65 mi
Temos pois uma P.G. decrescente ilimitada, para qual a
xb
milhas, uma
a1 65 mi e
. Logo,
a1
65 mi
130 mi.
1 q 1 1
2
Claro, o estudante deve estar se perguntando: o problema não poderia ter sido pelos métodos da
Cinemática aprendidos na Física do 2º grau?
Sim, é claro! Senão vejamos:
As equações horárias dos movimentos são:
Barco xb vt
Navio xn 65
No encontro
v
t
2
xb xn
e
v
vt 65 t ,
2
vt
vt 65 ,
2
vt
65
2
e o tempo de encontro é:
t
130
.
v
Voltando à equação do barco, temos então:
xb vt v
130
130 mi
v
e concluímos, mais uma vez, que o barco deve percorrer 130 mi para alcançar o navio.
Aí cabe uma outra pergunta: Por quê não termos utilizados diretamente o segundo método?
86
A resposta é simples: esta foi apenas uma ilustração de soma de parcelas, que são termos de uma
P.G., as quais vão se tornando cada vez menores.
3 - Trigonometria
3.1 Introdução
Historicamente, existem vestígios de um estudo de Trigonometria entre os babilônios, que a usavam
para resolver problemas práticos de navegação, de Astronomia e de Agrimensura.
As correspondências entre relações das medidas dos lados de um triângulo retângulo e da medida dos
seus ângulos foram, sistematicamente, empregadas, pela primeira vez, pelo astrônomo grego Hiparco, por
volta do ano 140 a.C.
A Trigonometria não se limita ao estudo de triângulos. Sua aplicação hoje em dia se estende, por
exemplo, à Análise, à Eletricidade, à Mecânica, à Acústica, à Topografia, etc. Do ponto de vista etimológico, a
palavra Trigonometria significa “medida dos triângulos”, sendo formada por três radicais gregos tri = três, gonos
= ângulo e metron = medir.
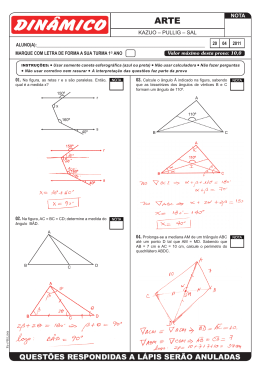
3.2 Ângulos
Um ângulo no plano é uma região delimitada por duas semi-retas de origem no mesmo ponto. Na
figura, α é a menor região delimitada pelas semi-retas. Outro ângulo definido pelas semi-retas é o ângulo β, que
é uma região de abertura visivelmente maior que a o ângulo α.
Os ângulos α e β na figura ao lado dizem respeito a ângulos no plano (Existem os chamados ângulos
sólidos, definidos no espaço, mas estão fora do âmbito deste estudo).
No plano, o sentido positivo atribuído aos ângulos é contrário ao dos ponteiros do relógio. Na figura ao
lado está indicado o sentido de crescimento de um ângulo. O ângulo α aumenta se a abertura aumentar no
sentido indicado pela seta. O sentido negativo é definido pela semi-reta ̅̅̅̅ movendo-se no sentido horário.
3.2.1 Medida de Ângulos
O grau é a unidade de medida de ângulo obtida ao dividirmos uma circunferência em 360 partes iguais.
Denotaremos a medida desta parte como sendo um grau ( ).
Usualmente, utiliza-se o grau como unidade de medida de ângulos, porém, a unidade de ângulo
adotada pelo Sistema Internacional (SI) é o radiano. Ele é definido de tal forma que um ângulo de π radianos
é igual a
: π radianos =
, em que π é o número irracional 3,141592654..., definido pelo quociente entre
o perímetro de uma circunferência e o seu diâmetro. Assim teremos, por exemplo, que
. Para
ângulos em unidades de grau de arco, é necessário indicar o símbolo “◦” para distinguir da unidade radiano.
Existem, além destas, outras medidas utilizadas. Por exemplo, o grado, que é obtido de forma análoga
ao grau; porém, a divisão é feita por 400. Podemos estabelecer, portanto, que
= 100 grad. Esta última
unidade é muito pouco utilizada.
3.2.2 Mudança de Unidades
Considere x a medida em radianos de um ângulo que corresponde a α graus. A relação entre estas
87
medidas é obtida pela seguinte proporção:
π rad ——
x rad ——
Isso permite que façamos a conversão da medida de uma unidade para a outra através de uma regra
de três simples. Podemos estabelecer a seguinte tabela de medidas de ângulos:
Da tabela acima podemos notar que medidas em graus e em radianos de um arco de circunferência são
diretamente proporcionais, isto é,
Exemplo 3.1: Converta 126◦ em radianos.
Solução: Temos
—— π rad
—— x
Então,
Exemplo 3.2: Converter 2π/5rad em graus.
o
Exemplo 3.3: Exprimir 300 em radianos.
3.2.3 Classificação de Ângulos
(i) quanto à abertura:
1. Ângulo nulo: α =
2. Ângulo agudo:
.
<α<
3. Ângulo reto: α =
.
.
<α<
4. Ângulo obtuso:
5. Ângulo raso: α =
.
6. Ângulo giro: α =
.
.
(ii) quanto ao posicionamento (relativamente a outros ângulos):
1. Ângulos complementares: α+β =
. Diz-se que α e β são complementares se a soma α+β for um
ângulo reto. Neste caso, diz-se também que 90◦ − α é o complementar ou o complemento de α, e vice-versa.
Naturalmente,
<α<
e
<β<
, com 0 < α + β <
.
88
2. Ângulos suplementares: α + β =
. Diz-se que α e β são suplementares se a soma α + β for um
−α é o suplementar ou o suplemento de α, e vice-versa.
ângulo raso. Neste caso, diz-se também que
Naturalmente,
<α<
e0<β<
, com 0 < α + β <
3. Ângulos replementares: α + β =
. Diz-se que α e β são replementares se a soma α + β for um
− α é o replementar ou o replemento de α, e vice-versa.
ângulo giro. Neste caso, diz-se também que
Naturalmente,
<α<
e
<β<
, com 0 < α + β <
4. Ângulos explementares: α + β = 72
.
. Diz-se que α e β são explementares se a soma α + β for um
ângulo de dois giros. Neste caso, diz-se também que 72
versa. Naturalmente, 0◦ < α < 72
.
e 0◦ < β < 72
− α é o explementar ou o explemento de α, e vice-
, com 0 < α+β < 72
.
Exemplo 3.4: O complemento do suplemento do triplo de um ângulo mede 30◦. Classifique este ângulo
quanto a abertura.
Solução: O triplo de um ângulo: 3x. O suplemento do triplo de um ângulo: 18
do suplemento do triplo de um ângulo: 9 −(18 −3x). Este último é igual a 3
Resolvendo-se esta equação encontramos x = 4 . Logo, o ângulo é agudo.
−3x, e o complemento
, ou seja, 9
−(18
−3x) = 3
.
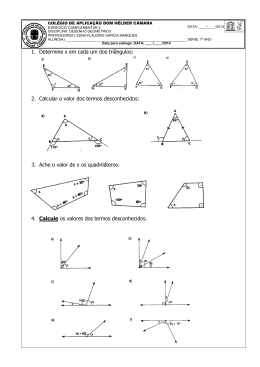
3.3 A Circunferência Trigonométrica
Considere uma circunferência de raio unitário com centro na origem de um sistema cartesiano
ortogonal. Essa circunferência será denominada ciclo ou circunferência trigonométrica. O ponto A = (1, 0),
interseção da circunferência com o semi-eixo positivo OX, será chamado origem do ciclo. Os pontos A, B, C e
D, interseções do ciclo com os eixos coordenados, dividem o ciclo em quatro partes congruentes denominadas
quadrantes. Os quadrantes são numerados, a partir de A, no sentido anti-horário (de A para B para C),
conforme indicamos na figura abaixo. Convencionamos que o ponto divisor de dois quadrantes está em ambos;
assim, por exemplo, B está no
quadrante e também no
(ele é o ponto final do
e o ponto inicial do
quadrante).
Os quadrantes são usados para localizar pontos e a caracterização de ângulos trigonométricos. Por
convenção, os pontos situados sobre os eixos não pertencem a qualquer um dos quadrantes.
Já sabemos associar os números reais aos pontos de uma reta. Veremos agora como associar a cada
número real x a um ponto na circunferência trigonométrica. Sabemos também que ao número x = 0 está
correspondido o ponto A, que é a origem do ciclo. Se x ≠ 0, associamos a x o ponto final do seguinte percurso
realizado sobre a circunferência:
• partimos de A;
• se x > 0, percorremos o ciclo no sentido anti-horário;
89
• se x < 0, percorremos o ciclo no sentido horário;
• o comprimento de percurso é |x|.
O ponto associado ao número x é denominado imagem de x no ciclo.
OBS.
*Esses percursos podem ter mais do que uma volta na circunferência. Mesmo assim vamos chamá-los
de arcos.
*Como a circunferência tem raio 1, o seu comprimento é l = 2π · 1 = 2π. Nessa circunferência o
comprimento de qualquer arco é numericamente igual à sua medida em radianos. Isso significa que fazer um
percurso de comprimento x é percorrer um arco de x rad.
3.3.1 Ângulo Trigonométrico
Vimos que um ângulo pode ter o valor real que se desejar. No entanto, a semi-reta que determina o
ângulo (com outra semi-reta, fixa, de referência) completa uma volta após 36 , duas voltas após 720◦, etc., ou
uma volta no sentido contrário e, nesse caso, diz-se que descreveu um ângulo de −36 . O menor ângulo α
descrito pela semi-reta é o ângulo trigonométrico, ou primeira determinação positiva, e para o ângulo ϕ descrito
pela semi-reta tem-se:
ϕ = α + k · 36
, k ∈ Z.
O ângulo α é o de maior interesse em trigonometria, em particular, no que toca às funções
trigonométricas, abordadas posteriormente. Por exemplo, se x = α+m·36 e y = α+n·36 (m e n números
inteiros), para igualar os ângulos x e y é necessário que m = 0 e n = 0 (por exemplo), uma condição trivial. A
razão para a existência desta periodicidade para ângulos prende-se com o caráter das funções trigonométricas,
o qual será discutido adiante. No entanto, é necessário definir univocamente a aplicação que determina o
ângulo definido por duas retas que se intersectam. Portanto, e para esse efeito, medem-se os ângulos num
domínio que vai de
a 36
(ou, o que é equivalente, de 0 a 2π radianos).
3.3.2 Números Congruentes
Os números x e x + 2π têm representação no mesmo ponto da circunferência trigonométrica. Nesse
mesmo ponto são representados, de fato, todos os seguintes números,
x, x ± 2π, x ± 4π, x ± 6π, x ± 8π, ..., etc,
que denominamos números congruentes (ou côngruos) a x. Podemos notar que cada número congruente a x
se escreve na forma x +( número par )π e, portanto, pode ser representado por x +2kπ, em que k ∈ Z.
Assim, o conjunto dos números congruentes a x é {x + 2kπ; k ∈ Z}.
3.4 Trigonometria e as Relações no Triângulo Retângulo
A partir da sua criação pelos matemáticos gregos, quando a trigonometria dizia respeito exclusivamente
à medição de triângulos, e tal como as funções e relações trigonométricas apresentadas a seguir, era aplicada
ao estudo de triângulos retângulos. Porém, as funções trigonométricas resultantes, e apresentadas mais
adiante, encontram aplicações mais vastas e de maior riqueza noutras áreas como a Física (por exemplo, no
estudo de fenômenos periódicos) ou a Engenharia. Teorias mais elaboradas como a dos números complexos, a
das funções trigonométricas hiperbólicas e do desenvolvimento em série de Taylor de funções trigonométricas,
dependem do estudo da trigonometria. Nos limitaremos à trigonometria no plano.
Em trigonometria, os lados dos triângulos retângulos assumem nomes particulares, apresentados na
figura ao lado. O lado oposto ao ângulo reto, chama-se hipotenusa; os lados que formam o ângulo reto
chamam-se catetos.
3.4.1 O Teorema de Pitágoras
90
O geômetra grego Pitágoras (570−501 a.C.) formulou o seguinte teorema, que tem hoje o seu nome, e
que relaciona a medida dos diferentes lados de um triângulo retângulo.
Teorema (de Pitágoras). A soma dos quadrados dos comprimentos dos catetos é igual ao quadrado do
comprimento da hipotenusa, ou seja, se a e b são os comprimentos dos dois catetos e c o comprimento da
hipotenusa, temos
.
3.4.2 Relações Trigonométricas no Triângulo Retângulo
Boa parte das aplicações trigonométricas estão relacionadas com comprimentos dos lados e com os
ângulos de um triângulo. Devemos, no entanto, apresentar algumas definições das relações trigonométricas
no triângulo retângulo.
Definição. Considere um triângulo ABC retângulo em B, cujos lados medem ̅̅̅̅ = a,̅̅̅̅̅ = b e ̅̅̅̅ = c e
seja α o ângulo oposto ao cateto ̅̅̅̅ . Então,
Exemplo 3.5: Encontre, para o ângulo α, as relações trigonométricas no
triângulo da figura.
Exercícios Propostos
1.12 até 1.18 no final da apostila.
3.5 Funções Trigonométricas
3.5.1 As Funções e as Relações Trigonométricas Fundamentais
Recorrendo-se à circunferência trigonométrica, podemos estender o valor das razões trigonométricas
no triângulo retângulo para quaisquer valores, além dos ângulos de medida entre zero e noventa.
91
Considere o ponto P(xP, yP) sobre a circunferência trigonométrica e cujo centro coincide com o sistema
cartesiano ortogonal. O triângulo ΔOMP é retângulo e ̅̅̅̅ = 1. Assim sendo,
Como na circunferência trigonométrica o raio ̅̅̅̅ é unitário, temos que as coordenadas do ponto P são
(xP, yP) = (cos(x), sen(x)). Assim, se P é um ponto de coordenadas (xP, yP) na circunferência trigonométrica,
então:
Desta forma, definimos o seno e o cosseno do ângulo para quaisquer valores de x, e não somente para
aqueles entre
(ou 0 radianos) e 9 (ou π/2 radianos), como anteriormente. Enunciemos a definição,
portanto, destas funções.
Definição. A função que associa cada x ∈ R à abscissa do ponto P da circunferência trigonométrica,
denomina-se função cosseno, ou seja,
Definição. A função que associa cada x ∈ R à ordenada do ponto P da circunferência trigonométrica,
denomina-se função seno, ou seja,
De acordo com a definição e observando a figura, podemos ver que
92
Pode-se observar ainda que, por P pertencer à circunferência trigonométrica, −1 ≤ cos(x) ≤ 1 e −1 ≤
sen(x) ≤ 1. Assim, o conjunto imagem das funções cosseno e seno estão limitadas ao intervalo [−1, 1], ou seja,
f(x) =cos(x) e g(x) = sen(x). Então,
A definição de tangente de um ângulo num triângulo retângulo nos diz que:
e, de acordo com a figura, os triângulosΔOPM e ΔOP’A são retângulos e o ângulo em O é comum. Logo, eles
são semelhantes. Assim,
ou seja,
Segue, da primeira igualdade, que
93
e, da segunda,
A tangente de x é, portanto, também assinalada pela ordenada do ponto P′, ou seja, o ponto P′ tem
coordenadas P′(x, y) = (1, tg(x)).
Definição. A função que associa cada x ∈ R à ordenada do ponto P′, obtido da interseção do
prolongamento do segmento OP com a reta tangente à circunferência trigonométrica no ponto A, denomina-se
função tangente, ou seja,
h : {x ∈ R; x ≠ π/2 + kπ, k ∈ Z}
x
R
h(x) = tg(x) = yP’
Definição. A função que associa a cada x, em que cos(x) ≠ 0, ao inverso multiplicativo do seu cosseno,
denomina-se função secante, ou seja,
h : {x ∈ R; x ≠ π/2 + kπ, k ∈ Z}
R
x
Observe que estamos definindo a secante do ângulo x como o inverso multiplicativo do cosseno deste
mesmo ângulo. Sendo assim,
O mesmo se passa para as funções cotangente e cossecante. O valor da cotangente de um ângulo
corresponde à abscissa do ponto P′′, situado sobre a reta horizontal tangente à circunferência no ponto (0, 1),
ou seja, o ponto P′′ tem coordenadas P′(x, y) = (cotg(x), 1). De fato, são semelhantes os triângulos ΔOPM e ΔP′′
OB. Assim,
ou seja,
Segue, da segunda igualdade, que
e, da primeira, que
Quanto maior for a abscissa do ponto P, menor será o ângulo x, e a semi-reta definida pelo ângulo com
o eixo X se aproxima deste. Logo, cotg(x) aumenta, bem como a abscissa do ponto P′′.
Definição. A função que associa cada x ∈ R à abscissa do ponto P′′, obtido da interseção do
prolongamento do segmento OP com a reta tangente à circunferência trigonométrica no ponto B, denomina-se
função cotangente, ou seja,
Definição. A função que associa a cada x, em que sen(x) ≠ 0, ao inverso multiplicativo do seu seno,
denomina-se função cossecante, ou seja,
94
Observe que estamos definindo a cossecante do ângulo x como o inverso multiplicativo do seno deste
mesmo ângulo. Sendo assim,
Por se tratar de triângulos retângulos, podemos escrever para ΔOPM, ΔOP′A e ΔP′OB as seguintes
relações:
3.5.2 As Funções Trigonométricas e os Números Trigonométricos
Nas aplicações são bastantes usados o seno e o cosseno das medidas de arcos dadas em graus, que
são respectivamente iguais ao seno e ao cosseno dos números reais que se obtém transformando as medidas
em radianos. Podemos formar a tabela abaixo.
95
Dois números congruentes tem imagens coincidentes no ciclo trigonométrico e por isso possuem senos
iguais e cossenos iguais.
Para todo x real e para todo inteiro k, temos
Exercícios Propostos
1.19 até 1.33 no final da apostila.
3.5.4 Paridade das Funções Trigonométricas
Nesta seção serão apresentadas algumas propriedades importantes das funções trigonométricas seno,
cosseno, tangente e cotangente, nomeadamente: paridade, sinal, monotonia, periodicidade, e o resultado
da redução ao primeiro quadrante.
Das funções trigonométricas (seno, cosseno, tangente, cotangente, secante e cossecante), todas têm
uma paridade bem definida.
Proposição. A função seno é ímpar e a cosseno é par.
Proposição. As funções tangente, cotangente e secante são ímpares e a função secante é par.
3.5.5 Sinal das Funções Trigonométricas
Seja P(cos(α), sen(α)) um ponto da circunferência trigonométrica.
Em suma, temos o seguinte quadro
96
3.5.7 Reduções ao Primeiro Quadrante
A circunferência trigonométrica fica dividida em quatro partes quando, por exemplo, sua origem coincide
com o sistema cartesiano ortogonal, como indicado na figura ao lado. Cada partes é denominada quadrante e
são indicados conforme o sentido do crescimento dos ângulos.
Vimos que existem alguns ângulos, no primeiro quadrante, para os quais podemos determinar
facilmente os valores das razões trigonométricas, e que convém ter sempre presente.
A aplicação da redução ao primeiro quadrante nos auxilia, por exemplo, a encontrar o valor de cada
uma das funções trigonométricas para outros ângulos, entender o comportamento destas nos quadrantes
restantes e na simplificação de expressões e de equações.
Redução do Segundo ao Primeiro Quadrante
Proposição. Seja α um ângulo no primeiro quadrante. Então,
Proposição. Seja α um ângulo no primeiro quadrante. Então
Redução do Terceiro ao Primeiro Quadrante
Proposição. Seja α um ângulo no primeiro quadrante. Então,
97
Proposição. Seja α um ângulo no primeiro quadrante. Então,
Redução do Quarto ao Primeiro Quadrante
Apesar desta redução poder ser demonstrada da mesma maneira que as anteriores, a faremos de outro
modo mais simples.
Proposição. Seja α um ângulo no primeiro quadrante. Então
Proposição. Seja α um ângulo no primeiro quadrante. Então
Os resultados obtidos para a redução de quadrantes encontram-se resumidos no seguinte quadro:
em que α é um ângulo do
quadrante e β é um ângulo a converter.
3.5.8 Periodicidade das Funções Trigonométricas
Definição. Uma função y = f (x), definida no domínio D, é chamada função periódica se existe um
número positivo p que satisfaz a igualdade, f (x + p) = f (x), para todo x ∈ D. O menor valor positivo de p que
satisfaz essa condição é chamado período da função. Verifica-se que para este valor p, f (x + k · p) = f (x), para
todo k ∈ Z.
O período de uma função é o comprimento do intervalo no qual esta função passa por um ciclo
completo de variação. Graficamente, o gráfico da função periódica apresenta um elemento de curva que se
repete.
Proposição. O período das funções f (x) = cos(x) e g(x) = sen(x) é 2π.
98
3.5.9 Resumo das Propriedades das Principais Funções Trigonométricas
A Função Cosseno
Denominamos função cosseno à função que a cada número real x faz corresponder o número y =
cos(x). Utilizando os pares (x, y) da tabela abaixo, em que y = cos(x), construímos o gráfico da função cosseno
no intervalo 0 ≤ x ≤ 2π.
Propriedades
• O domínio da função y = cos(x) é o conjunto dos números reais R.
• Imagem: Im = {y ∈ R;−1 ≤ y ≤ 1} = [−1, 1] (∃x; cos(x) = y ⇔ −1 ≤ y ≤ 1).
O valor máximo de cos(x) é 1, enquanto o valor mínimo é −1.
• Período: p = 2π, pois, x temos cos(x + 2π) = cos(x).
A Função Seno
Denominamos função seno à função que a cada número real x faz corresponder o número y = sen(x).
Utilizando os pares (x, y) da tabela abaixo, em que y = sen(x), construímos o gráfico da função cosseno
99
no intervalo 0 ≤ x ≤ 2π.
Propriedades
• O domínio da função y = sen(x) é o conjunto dos números reais R.
• Imagem: Im = {y ∈ R;−1 ≤ y ≤ 1} = [−1, 1] (∃x; sen(x) = y ⇔ −1 ≤ y ≤ 1).
O valor máximo de sen(x) é 1, enquanto o valor mínimo é −1.
• Período: p = 2π, pois, x temos sen(x + 2π) = sen(x).
A Função Tangente
Denominamos função tangente à função que a cada número real x ≠ π/2+kπ, k ∈ Z, faz corresponder o
número y = tg(x). Utilizando os pares (x, y) da tabela abaixo, em que y = tg(x), construímos o gráfico da função
tangente no intervalo 0 ≤ x ≤ 2π.
100
Propriedades
• O domínio da função y = tg(x) é o conjunto dos números {x ∈ R; x ≠ π/2 + kπ, k ∈ Z}.
• Imagem: Im = R (∃x; tg(x) = y ⇔ y ∈ R).
• Período: p = π, pois, ∀ x ≠ π/2 + kπ, k ∈ Z, temos tg(x + π) = tg(x).
A Função Cotangente
Denominamos função cotangente à função que a cada número real x ≠ kπ, k ∈ Z, faz corresponder o
número y = cotg(x). Utilizando os pares (x, y) da tabela abaixo, em que y = cotg(x), construímos o gráfico da
função cotangente no intervalo 0 ≤ x ≤ 2π.
101
Propriedades
• O domínio da função y = cotg(x) é o conjunto dos números {x ∈ R; x ≠ kπ, k ∈ Z}.
• Imagem: Im = R (∃x; cotg(x) = y ⇔ y ∈ R).
• Período: p = π, pois, ∀ x ≠ kπ, k ∈ Z, temos cotg(x + π) = cotg(x).
A Função Secante
Denominamos função secante à função que a cada número x ∈ R; x ≠ π/2+kπ, k ∈ Z, faz corresponder o
número y = sec(x). Utilizando os pares (x, y) da tabela abaixo, em que y = sec(x), construímos o gráfico da
função secante no intervalo 0 ≤ x ≤ 2π.
102
Propriedades
• O domínio da função y = sec(x) é o conjunto dos números {x ∈ R; x ≠ π/2 + kπ, k ∈ Z}.
• Imagem: Im = R \ (−1, 1) (∃x; sec(x) = y ⇔ y ∈] −∞,−1] ∪ [1,+∞[).
• Período: p = 2π, pois, ∀ x ≠ π/2 + kπ, k ∈ Z, temos sec(x + 2π) = sec(x).
A Função Cossecante
Denominamos função cossecante à função que a cada número x ∈ R; x ≠ kπ, k ∈ Z, faz corresponder o
número y = cossec(x). Utilizando os pares (x, y) da tabela abaixo, em que y = cossec(x), construímos o gráfico
da função secante no intervalo 0 ≤ x ≤ 2π.
103
Propriedades
• O domínio da função y = cossec(x) é o conjunto dos números {x ∈ R; x ≠ kπ, k ∈ Z}.
• Imagem: Im = R \ (−1, 1) (∃x; cossec(x) = y ⇔ y ∈] −∞,−1] ∪ [1,+∞[).
• Período: p = 2π, pois, ∀ x ≠ π/2 + kπ, k ∈ Z, temos cossec(x + 2π) = cossec(x).
Exercícios Propostos
1.34 até 1.46 no final da apostila.
3.6 Relações Importantes das Funções Trigonométricas
Em muitos casos é previsto a utilização de relações que envolvem funções trigonométricas diferentes
das que temos visto até aqui. Algumas destas podem envolver, por exemplo, funções trigonométricas da adição
de ângulos ou determinadas funções que envolvem funções trigonométricas de um ângulo, e cuja escrita pode
ser simplificada.
3.6.1 Fórmulas de Adição e Subtração
104
Considere dois arcos α e β com extremidades, respectivamente, nos pontos A e B, que estão sobre o
ciclo trigonométrico com centro na origem do sistema cartesiano ortogonal (ver figura abaixo). Pela lei dos
cossenos temos que:
Teorema. Considere α e β dois ângulos quaisquer. Então,
O cálculo de tg(β ± α) decorre, naturalmente, dividindo-se sen(β ± α) por cos(β ± α). Portanto,
exceto π/2, 3π/2 e seus côngruos.
3.6.2 Fórmulas de Duplicação
Teorema. Seja α um ângulo qualquer. Então,
Teorema. Seja α 6= π/2 + kπ e α 6= π/4 + kπ/2, k ∈ Z, um ângulo. Então,
3.6.3 Fórmulas de Bissecção
Teorema. Seja α um ângulo qualquer. Então,
Teorema. Seja α ≠ kπ, k ∈ Z, um ângulo. Então,
3.6.4 Fórmulas de Transformações da Adição em Produto
105
Teorema. Sejam α e β dois ângulos quaisquer. Então,
Os resultados obtidos nesta seção estão resumidos na seguinte tabela:
Exercícios Propostos
1.47 até 1.53 no final da apostila.
3.7 Funções Trigonométricas Inversas
Uma função f está devidamente caracterizada quando temos expresso quem é o seu domínio,
contradomínio e a lei de correspondência y = f (x). Quando uma dada relação entre números reais y = f (x) é
dita uma função, fica subentendido que o domínio D desta é o maior subconjunto de R que a define como tal.
Se dada uma função y = f (x), alterarmos seu domínio para um subconjunto D′ de D, dizemos que esta função
está restrita a D′ e a denotamos por
. Por um abuso de notação, utiliza-se f tanto para a função original
quanto para sua restrição.
A relação
(y) = x é função se f é uma função bijetora. Notoriamente, a classe das funções
trigonométricas não é bijetora. Neste caso, para determinar cada elemento que compõe a classe das funções
trigonométricas inversas trabalharemos com a classe das funções resultante de restrições impostas a cada
função trigonométrica.
Devido à periodicidade das funções trigonométricas, existem muitos intervalos nos quais cada restrição
a um destes define uma outra função bijetora. No entanto, usualmente é escolhido um intervalo de comprimento
máximo no qual o elemento zero é o ponto médio dos extremos deste ou é o extremo inferior.
3.7.1 Arco Cosseno
106
A função f : R → R definida por f (x) = cos(x) é não bijetora. Isto é facilmente constatado pelo seu
gráfico.
Pelo que foi dito anteriormente, a inversa da função cosseno será obtida de uma restrição de f tal que
ela seja bijetora. Por convenção, utiliza-se o intervalo [0; π] como o novo domínio, e, para que a função seja
sobrejetora, tomamos como contradomínio o conjunto dos valores permitidos para o argumento de f , ou seja, o
intervalo [−1; 1].
Desta forma, a função inversa do cosseno
(x) = arccos(x) pode ser estabelecida e, por definição de
função inversa, tem-se para esta função que o domínio é [−1; 1] e o contradomínio é [0; π].
Definição. Definimos a função arco cosseno y = arccos(x) à função que associa cada número real do
intervalo [−1, 1] ao ângulo y, 0 ≤ y ≤ π. Simbolicamente,
3.7.2 Arco Seno
Podemos facilmente verificar que a função f : R → R definida por f (x) = sen(x) não é bijetora através do
seu gráfico.
A inversa da função seno é obtida se restringirmos f (x) = sen(x) de tal modo que ela seja bijetora. Por
convenção, utiliza-se o intervalo [−π/2; π/2] como o novo domínio, e, para que a função seja sobrejetora,
tomamos como contradomínio o conjunto dos valores permitidos para o argumento de f , ou seja, o intervalo [−
1; 1]. Desta forma, a função inversa do seno
(x) = arcsen(x) pode ser estabelecida e, por definição de função
inversa, tem-se para esta função que o domínio é [−1; 1] e o contradomínio é [−π/2; π/2].
107
Definição. Definimos a função arco seno y = arcsen(x) à função que associa cada número real do
intervalo [−1, 1] ao ângulo y, −π/2 ≤ y ≤ π/2. Simbolicamente
3.7.3 Arco Tangente
Podemos facilmente verificar que a função
definida por f (x) = tg(x) não é bijetora através do seu gráfico.
A inversa da função tangente é obtida se restringirmos f (x) = tg(x) de tal modo que ela seja bijetora. Por
convenção, utiliza-se o intervalo ] − π/2; π/2[ como domínio, e, para que a função seja sobrejetora, tomamos
como contradomínio o conjunto dos valores permitidos para o argumento de f , ou seja, o conjunto dos números
reais.
Desta forma, a função inversa da tangente
(x) = arctg(x) pode ser estabelecida e, por definição de
função inversa, tem-se para esta função que o domínio é R e o contradomínio é ] − π/2; π/2[. Note que os
extremos do intervalo, −π/2 e π/2, são excluídos, pois, nesses pontos, a tangente não está definida.
Definição. Definimos a função arco tangente y = arctg(x) à função que associa cada número real ao
ângulo y, −π/2 < y < π/2. Simbolicamente
3.7.4 Arco Cotangente
108
Podemos facilmente verificar através do seu gráfico que a função
definida por f (x) = cotg(x) não é bijetora.
A inversa da função cotangente é obtida se restringirmos f (x) = cotg(x) de tal modo que ela seja
bijetora. Por convenção, utiliza-se o intervalo ]0; π[ como domínio, e, para que a função seja sobrejetora,
tomamos como contradomínio o conjunto dos valores permitidos para o argumento de f , ou seja, o conjunto
dos números reais.
Desta forma, a função inversa da cotangente
(x) = arccotg(x) pode ser estabelecida e, por definição
de função inversa, tem-se para esta função que o domínio é R e o contradomínio é ]0; π[. Note que os extremos
do intervalo, 0 e π, são excluídos, pois, nesses pontos, a cotangente não está definida.
Definição. Definimos a função arco cotangente y = arccotg(x) à função que associa cada número real
ao ângulo y, 0 < y < π. Simbolicamente,
3.8 Equações Trigonométricas
Uma grande parte das equações trigonométricas são ou ficamreduzidas a uma das seguintes equações
fundamentais:
1. cos(α) = cos(β)
2. sen(α) = sen(β)
3. tg(α) = tg(β)
Teorema. Dados dois números reais α e β, o conjunto solução da equação cos(α) = cos(β) é
Teorema. Dados dois números reais α e β, o conjunto solução da equação sen(α) = sen(β) é
Teorema. Dados dois números reais α e β, o conjunto solução da equação tg(α) = tg(β) é
109
Exercícios Propostos
110
111
112
113
114
Download