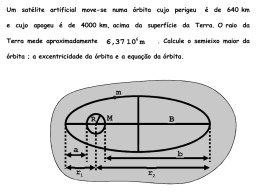
Anais do XVI Encontro de Iniciação Científica e Pós-Graduação do ITA – XVI ENCITA / 2010 Instituto Tecnológico de Aeronáutica, São José dos Campos, SP, Brasil, 20 de outubro de 2010 TRAJETÓRIAS LUNARES E INTERPLANETÁRIAS Guilherme Lourenço Mejia Instituto Tecnológico de Aeronáutica – ITA Rua H8C, 324, Campus do CTA, 12228-462, São José dos Campos/SP Bolsista PIBIC-CNPq [email protected] Sandro da Silva Fernandes Instituto Tecnológico de Aeronáutica – ITA Praça Marechal Eduardo Gomes, 50, Vila das Acácias, 12228-900, São José dos Campos/SP Bolsista PQ-CNPq [email protected] Resumo. O objetivo deste projeto é o estudo de trajetórias lunares e interplanetárias realizadas mediante a aplicação de impulsos (mudanças instantâneas do vetor velocidade), utilizando a aproximação “patched-conic”, caracterizada pelo uso do conceito de esfera de influência e de resultados analíticos do problema de dois-corpos. O trabalho abrange os seguintes assuntos: problema de dois-corpos, elementos orbitais, equação para o tempo de vôo, Problema de Kepler e Problema de Gauss. Tais tópicos são necessários para os seguintes temas serem abordados: transferência coplanar entre uma orbita circular ao redor da Terra e uma orbita circular ao redor da Lua; trajetórias interplanetárias utilizando manobra “patched-conic” em conjunto com a transferência de Hohmann; e a aplicação da resolução do Problema de Gauss em variáveis universais nas transferências Terra-Planeta Alvo. Finalmente o estudo é aplicado utilizando-se o software MATLAB para o desenvolvimento dos algoritmos necessários. Palavras chave: Trajetórias lunares, transferências interplanetárias, e aproximação “patched-conic” 1. Introdução Os problemas de otimização de trajetórias espaciais - transferências simples e “rendez-vous” - são fundamentais em Mecânica Espacial e têm sido tema de diversos estudos analíticos e numéricos desde o início dos anos 50 quando Lawden (1954, 1963) estabeleceu os fundamentos da moderna navegação espacial através do Cálculo de Variações clássico - Teoria de Euler-Lagrange (Bliss, 1946; Gelfand e Fomin, 1963; Elsgolts, 1977). Deve-se ressaltar que o primeiro estudo analítico sobre o problema de transferências espaciais ótimas foi desenvolvido por Hohmann (1960) em 1925, antes do advento da Era Espacial. Hohmann estabeleceu uma elipse bitangente como a trajetória de menor consumo de combustível entre as órbitas de dois planetas, considerando que a transferência é realizada através de impulsos para razões de raios final e inicial r2/r1 menores ou iguais a 11.94, considerando as órbitas coplanares. Os principais resultados analíticos têm sido desenvolvidos para transferências de pequenas amplitudes com duração fixada, realizadas através de sistemas propulsivos de baixo empuxo e potência limitada, para as transferências de longa duração fixada, também realizadas através de sistemas propulsivos de baixo empuxo e potência limitada (Edelbaum, 1964, 1965; Marec e Vinh, 1981), e para as transferências impulsivas entre órbitas quaisquer com duração livre (Marchal, 1967a, 1976; Marchal, Marec e Winn, 1967; Bell ,1968; Edelbaum, 1964, 1967; Gobetz e Doll, 1969). Excelentes sínteses sobre estes problemas podem ser encontradas nos trabalhos de Marec (1967, 1979, 1984), Marchal (1967b), Gobetz e Doll (1969). Trabalhos mais recentes têm considerado manobras impulsivas com duração fixada (Eckel e Vihn, 1984; Lawden, 1993) e problemas de “rendez-vous” em torno de um ponto (estação espacial) em órbita (Carter, 1984, 1989, 1990; Carter e Humi, 1987; Carter e Brient, 1991, 1992). A maioria destes estudos, realizados nas décadas de 60 e 70, e em parte da década de 80, consideram a hipótese de campo central Newtoniano. A possibilidade de se empregar forças secundárias tais como o achatamento do corpo central, o arrasto nas manobras na atmosfera, as forças atrativas devido a outros planetas no caso de viagens interplanetárias no sistema solar, foi ressaltada por Marchal (Marchal, Marec e Winn, 1967), e tem recentemente despertado o interesse dos pesquisadores. Conforme foi ressaltado nos parágrafos anteriores, a maior parte das análises preliminares de missões utiliza a hipótese de campo central Newtoniano (que define o clássico problema de dois corpos), tanto para aplicações envolvendo manobras de satélites artificiais como para trajetórias lunares ou interplanetárias de sondas ou naves espaciais tripuladas. No caso de trajetórias lunares ou interplanetárias, utiliza-se na análise preliminar de missões a aproximação patched-conic (Bate et al, 1971; Prussing e Conway, 1993), que envolve o conceito de esfera de influência, segundo a qual a trajetória de uma sonda ou nave espacial enviada da Terra para um Planeta-Alvo pode ser decomposta em três fases distintas cada uma descrita pela dinâmica do problema de dois corpos: a primeira fase Anais do XVI ENCITA, ITA, 20 de outubro de 2010 , corresponde ao vôo nas proximidades da Terra, a segunda ao vôo interplanetário em que o Sol é o centro de atração e a terceira corresponde ao vôo nas proximidades do Planeta-Alvo. 2. Problema de dois-corpos Consideram-se dois corpos puntiformes 1 e 2 de massas m1 e m2, respectivamente, cujos vetores posição em um sistema de referencia inercial Oxyz são denotados por r1 e r2. Seja O’x’y’z’, onde O’=CM (centro de massa), um sistema inercial associado ao CM em Oxyz. F1 e F2 representam as forças gravitacionais atuantes. Conforme a Fig. 1 abaixo. Figura 1. Representação dos sistemas referenciais Oxyz e O’x’y’z’ 2.1. Integrais Primeiras Pode-se chegar à Eq. (1) do movimento relativo no problema de dois corpos: d2r 3r 2 dt r (1) onde µ: parâmetro gravitacional, igual a G.m1, quando m1>>m2, sendo m1 o corpo central. A partir da Eq. (1), podemse deduzir as seguintes Eqs. (2), (3) e (4). 2.1.1. Integral de energia v2 2 r Equação (2) representa a conservação de energia mecânica. 2.1.2. Integral de Momentum Angular (2) Anais do XVI ENCITA, ITA, 20 de outubro de 2010 , h r dr dt (3) A conservação de momentum angular, Eq. (3) , mostra que o movimento ocorre no plano. 2.1.3. O vetor de Laplace-Runge-Lenz B vh r r (4) 2.2. Equação polar da trajetória Considera-se o movimento do corpo orbitante m em torno do corpo primário M, M >> m. A trajetória é descrita no plano de movimento através da Eq. (5). r (h 2 / ) 1 ( B / ) cos f (5) onde f: ângulo entre r e B denominado de anomalia verdadeira 2.3. Seções cônicas r p 1 e cos f (6) onde p: semi-latus rectum, e: excentricidade Note que a equação polar da trajetória está sob a forma da equação das seções cônicas. 2.4. Órbitas elíptica, circular, parabólica e hiperbólica As órbitas são classificadas como: Circular se e = 0 Elíptica se 0 < e < 1 Parabólica se e = 1 Hiperbólica se e > 1 Caso h = 0 haverá um caso degenerado, movimento em linha reta. 3. Elementos Orbitais A título de ilustração considere o movimento de um satélite artificial com respeito ao sistema geocêntricoequatorial, sistema no qual com a origem está no centro da terra, o plano xy é o plano do Equador e o eixo x segue a direção de γ, conforme as Figs. 2 e 3 a seguir. Anais do XVI ENCITA, ITA, 20 de outubro de 2010 , Figura 2. Representação elementos orbitais no sistema geocêntrico-equatorial Figura 3. Representação dos elementos orbitais no plano da órbita Elementos orbitais clássicos ou Keplerianos: a: semi-eixo maior e: excentricidade e=(c/a) I: inclinação do plano da órbita: I pertencente a [0º, 180º] Ω: longitude do nodo ascendente: Ω pertencente a [0º, 360º[ ω: argumento do pericentro: ω pertencente a [0º, 360º[ Anais do XVI ENCITA, ITA, 20 de outubro de 2010 , f: anomalia verdadeira: f pertencente a [0º, 360º[ Além da anomalia verdadeira existem duas outras grandezas angulares associados à posição do objeto em órbita: a anomalia excêntrica E e anomalia média M. 3.1. Relação entre r e v com elementos orbitais Dados o vetor posição e o vetor velocidade em um instante t, podem ser determinados os elementos orbitais clássicos através das Eqs (7) a (15). h rv (7) N kh (8) a r rv 2 2 e 1 r rh r (9) (10) cos I k h h (11) cos iN N (12) cos iN N (13) cos e N eN (14) cos f er er (15) onde e ≠ 0 e N ≠ 0. 3.2. Expressão de r e v em termos dos elementos orbitais A passagem do sistema geocêntrico-equatorial para o sistema de Gauss (sistema móvel inserido no plano de órbita) é efetuada através de três rotações sucessivas. Para tanto matrizes de rotação serão usadas: cos sen 0 RZ sen cos 0 0 0 1 0 0 1 RX 1 I 0 cos I sen I 0 sen I cos I cos f sen f 0 RZ 2 f sen f cos f 0 0 0 1 O produto destas matrizes define a matriz de transformação Gauss|Geo: (16) (17) (18) Anais do XVI ENCITA, ITA, 20 de outubro de 2010 , TGauss|Geo , I , f RZ 2 f RX 1 I RZ (19) Uma vez que essa transformação é ortogonal, chegam-se as Eqs. (20) e (21). (20) (21) 4. Equação para o tempo de vôo A equação para o tempo de vôo é aquela que descreve a trajetória de um objeto orbitante em função do tempo. 4.1. Equação de Kepler (para o movimento elíptico) (22) M E e senE onde E é a anomalia excêntrica elíptica, M é a anomalia média e: M n(t ) n (23) (24) a3 sendo n o movimento médio e τ: o tempo de passagem pelo periapsis. 4.2. Equação de Barker (para o movimento parabólico) 2 (t ) pD D3 3 (25) onde D é anomalia excêntrica parabólica: D f 2 p tan (26) 4.3. Generalização da Equação de Kepler para o movimento hiperbólico N esenh F F (27) onde F é a anomalia excêntrica hiperbólica, N é a anomalia média hiperbólica e: N nH (t ) nH a 3 (28) (29) Anais do XVI ENCITA, ITA, 20 de outubro de 2010 , 4.4. Métodos de resolução da equação para o tempo de vôo: A forma de resolução da equação para o tempo de vôo pode ser divida em dois tipos: solução analítica – método de aproximações sucessivas e solução numérica – métodos iterativos. Com respeito a solução numérica, os processos estudados foram método de Newton-Raphson, da bissecção e o método de Newton-Raphson de segunda ordem. 5. Problema de Kepler O problema de Kepler consiste em determinar os vetores posição e velocidade em um instante qualquer t, dados seus valores no instante t0 conhecidos (t0 < t). (Fonte: Bate, 1971) 5.1. Resolução clássica, envolvendo elementos orbitais Primeiramente determinam-se os elementos orbitais através dos dados iniciais. Em seguida calcula-se anomalia verdadeira f para o instante t a através de uma das equações listadas no tópico 4. Finalmente, determinam-se os vetores posição e velocidade em t pelas expressões de 3.2 5.2. Coeficientes de Lagrange Desde que o movimento do corpo orbitante se realize em um plano – plano da órbita – e os vetores posição e velocidade sejam linearmente independentes (nos casos não-degenerados), podem-se estabelecer as Eqs. (30) e (31). r t f r 0 gv0 (30) v t f ' r 0 g ' v0 (31) f e g são funções do tempo t, onde f, g, f’, g’ são denominados de coeficientes de Lagrange Encontrando as Eqs. (32) a (35): (32) (33) (34) (35) Pode-se resolver o problema de Kepler através dos coeficientes de Lagrange, sem o uso de elementos orbitais clássicos. 6. Problema de Gauss A formulação (PVCDP – problema de valor de contorno em dois pontos) pode ser descrita pela frase a seguir. Dados os vetores posição r1 e r2, o intervalo de tempo Δt=t2-t1, e, o sentido de movimento, determinar os vetores velocidade v1 e v2, isto é, estabelecer a trajetória do objeto em estudo. 6.1. Algoritmos de resolução em anomalia excêntrica e método de iteração em p O código desenvolvido através do programa MATLAB para o caso elíptico pode ser visto pela Fig. 4. Anais do XVI ENCITA, ITA, 20 de outubro de 2010 , Figura 4. Algoritmo de resolução do problema de Gauss em anomalia excêntrica com iteração em p 7. Trajetórias lunares O cálculo preciso de uma trajetória lunar só pode ser feito por integração numérica das equações de movimento, levando em conta a forma geóide da Terra, perturbações solares, pressão solar e a atração da Lua na fase final entre outros fatores. Devido aos movimentos complexos da Lua, o planejamento de uma missão real se baseia fortemente nas efemérides lunares, que é uma lista tabulada da posição da Lua a intervalos regulares de tempo. Deste modo, missões lunares são planejadas respeitando uma base horária, diária e mensal. 7.1. Esfera de influência É coveniente definir a esfera de influência em torno de cada corpo gravitacional e dizer que quando o objeto cruza a fronteira da “esfera de influência”, considera-se que esse objeto atingiu a velocidade de escape e, portante, está livre da ação gravitacional do corpo central. Obviamente recorre-se a tal artifício para simplificar a análise da trajetória descrita, pois a velocidade de escape só seria atingida à uma distância infinita. (Fonte: Bate, 1971) 7.2. Método da aproximação “patched-conic” Pode-se levar em conta a gravidade lunar e ainda usar a mecânica orbital de dois-corpos, basta considerar que a nave esteja sob influência única da gravidade terrestre até entrar na “esfera de influência” da Lua e assumir que aí ela se move apenas sob a influencia gravitacional da Lua. Este é o chamado método “patched-conic”. Pode-se dizer que esta é uma boa aproximação para uma análise preliminar. 7.3. Algoritmo para determinação de trajetórias lunares com condições iniciais e de contorno: r0, v0, φ0 e λ1. Basicamente determina-se a trajetória descrita pela nave conhecendo as condições iniciais e de contorno: raio da órbita circular em torno da Terra r0; velocidade inicial v0; ângulo φ0 entre v0 e a velocidade da órbita circular em torno da Terra vcirc0; e o ângulo λ1 de chegada na esfera de influência da Lua. Anais do XVI ENCITA, ITA, 20 de outubro de 2010 , 7.4. Algoritmo iterativo em v0 para determinação de trajetórias lunares com condições iniciais e de contorno: r0, rf, φ0 e λ1. Neste caso, a trajetória é determinada conhecendo-se: raio r0; raio da órbita final circular em torno da Lua rf; ângulo φ0 ; e o ângulo λ1. Para resolver este problema utilizou-se um método iterativo em v0 com o auxílio do algoritmo anterior. A Fig. 5 mostra a execução do código desenvolvido através do programa MATLAB. Figura 5. Algoritmo iterativo em v0 para determinação de trajetórias lunares com condições iniciais e de contorno: r0, rf, φ0 e λ1. A Fig. 6 gerada mostra o arco de hipérbole da trajetória geocêntrica descrita pela nave espacial; o arco circular da trajetória da Lua durante o Δt considerado; a esfera de influência da Lua, quando a nave passa a sofrer o efeito gravitacional lunar; e, finalmente, o arco de hipérbole da trajetória selenocêntrica. Note que também estão desenhados mais dois círculos completos, correspondendo às órbitas circulares inicial em torno da Terra e final em torno da Lua. Figura 6. Trajetória da viagem da Terra à Lua utilizando o método “patched-conic”. Anais do XVI ENCITA, ITA, 20 de outubro de 2010 , 8. Trajetórias interplanetárias 8.1. Transferência de Hohmann É a transferência entre duas órbitas circulares coplanares feita através de um arco de elipse tangente as duas órbitas circulares. A Fig. 7 a seguir representa a trajetória de transferência de uma órbita circular inicial de raio r1 para uma órbita final de raio r2 com r2> r1. Figura 7. Transferência de Hohmann entre as órbitas circulares 1 e 2. (Fonte: Bate , 1971 ) Também é transferência que requer o mínimo de Δv para a mudança de órbitas circulares para razões de raios final e inicial r2/r1 menores ou iguais a 11.94, considerando as órbitas coplanares. As Eqs. (36) a (42) são mostradas abaixo. (36) (37) (38) (39) (40) (41) (42) 8.2. Algoritmo para determinação de trajetórias interplanetárias e do ângulo de fase necessário para transferências de Hohmann Terra-Planeta Alvo Determina-se a trajetória descrita por uma nave espacial entre a Terra e um planeta do Sistema Solar utilizando a transferência de Hohmann. Sabendo a velocidade angular do planeta alvo, também é calculado o ângulo de fase, que é o ângulo que os dois planetas devem formar no instante de partida da nave da Terra. Neste modelo, o único efeito Anais do XVI ENCITA, ITA, 20 de outubro de 2010 , gravitacional considerado foi o do Sol. O ângulo de fase é calculado considerando o tempo total da transferência de Hohmann e a velocidade angular relativa dos dois planetas. Considerando a trajetória correspondendo a transferência de Hohmann, montou-se a Tab. 1 com os elementos orbitais principais e as manobras delta-V necessárias: delta-V1 para sair da órbita circular inicial e injetar a nave na semi-elipse de transferência e delta-V2 para sair da semi-elipse de trasferência e entrar na órbita circular final. Tabela 1. Transferência de Hohmann da Terra para cada outro planeta do Sistema Solar, sendo calculadas as manobras delta-V de partida 1 e de chegada 2; o ângulo de fase gama1; o tempo –“tof” ou “time of flight”- da manobra; o semi-eixo maior e a excentricidade da órbita de transferência. Terra-Mercúrio Terra-Vênus Terra-Marte Terra-Júpiter Terra-Saturno Terra-Urano Terra-Netuno Terra-Plutão delta-V1(km/s) delta-V2(km/s) gama1(rad) tof(anos) a(km) e 7,532951207 9,611558980 -4,39254505 0,28899510 1,04E+08 0,441859 2,495394171 2,706569998 -0,94302239 0,40020582 1,29E+08 0,160542 2,944816435 2,648998985 0,77397406 0,70922967 1,89E+08 0,207514 8,791817329 5,643160046 1,69561054 2,73177161 4,64E+08 0,677482 10,28894723 5,442738161 1,85169376 6,05162409 7,88E+08 0,810212 11,28057615 4,659720627 1,94289892 16,0404614 1,51E+09 0,900908 11,65358505 4,054234655 1,97497860 30,6142156 2,32E+09 0,935598 11,81325781 3,688030760 1,98836108 45,4920065 3,02E+09 0,950543 8.3. Algoritmo para determinação de trajetórias interplanetárias Terra-Planeta Alvo usando a aproximação “patched-conic”. Determina-se a trajetória descrita por uma nave espacial entre a Terra e um planeta do Sistema Solar utilizando o método “patched-conic”. Este modelo é mais refinado do que o adotado pelo algoritmo anterior, pois considera os efeitos gravitacionais dos planetas em suas respectivas esferas de influência, e a gravidade do Sol entre as duas esferas. Considerando a fase heliocêntrica da trajetória correspondendo a transferência de Hohmann, calculam-se os elementos orbitais principais e as manobras delta-V necessárias para viagem Terra-Planeta do Sistema Solar. Para exemplificar segue abaixo a Tab. 2, transferência Terra-Marte. As altitudes das órbitas circulares de partida da Terra e de chegada em Marte consideradas foram 300km e 200km, respectivamente. A definição da velocidade hiperbólica de excesso é a velocidade que a nave espacial possui após ter saído da esfera de influência, isto é, trata-se da velocidade final após ter escapado da ação gravitacional do corpo central considerado. Tabela 2. Transferência Terra-Marte, com manobras delta-V; velocidades hiperbólicas de excesso Vhexc; semi-eixos maior e excentricidades; ângulo de fase gama1; e tempo –“tof”. Os índices 1, 2, H correspondem aos dados relativos a esfera de influência da Terra, de Marte e do Sol, respectivamente. E “delta-Vt” é o delta-V total. delta-V1(km/s) delta-V2(km/s) delta-Vt(km/s) Vhexc1(km/s) Vhexc2(km/s) a1(km) e1 3,590038734 18,54821627 22,138255 2,944816435 21,4804012 -45964,3 1,1453 aH(km) eH a2(km) e2 gama1(rad) tofH(anos) 188771418,1 0,207513753 -95,0266025 38,82098806 0,77393503 0,709229666 8.4. Algoritmo para determinação de trajetórias interplanetárias Terra-Planeta Alvo usando resolução do Problema de Gauss em variáveis universais e método de iteração em anomalia excêntrica. Determina-se a trajetória descrita por uma nave espacial entre a Terra e um planeta do Sistema Solar resolvendo o Problema de Gauss em variáveis universais e método de iteração em anomalia excêntrica. Este modelo considera apenas a gravidade do Sol e permite a determinação de quaisquer trajetórias, inclusive aquelas que não sejam transferência de Hohmann. Considerando diversos tempos de vôo Δt e diversas diferenças de anomalias verdadeiras Δf, calcularam-se os elementos orbitais principais e as manobras delta-V necessárias para viagem Terra-Marte. Para exemplificar segue abaixo a Tab. 3, transferência Terra-Marte para um caso particular. Tabela 3. Transferência Terra-Marte usando a resolução do Problema de Gauss em variáveis universais, sendo calculadas as manobras delta-V de partida 1 e de chegada 2; o semi-eixo maior e a excentricidade da órbita. sentido do movimento progressivo Δt(anos) Δf(rad) delta-V1(km/s) delta-V2(km/s) a(km) e 2,83692 3,1316 17,53731693 17,44848213 3,26E+08 0,6689 Anais do XVI ENCITA, ITA, 20 de outubro de 2010 , 9. Conclusões A Mecânica Orbital tem como foco o estudo trajetórias de naves espaciais, incluindo manobras orbitais, mudanças de plano de órbita, e transferências interplanetárias. É usada em missões para prever os resultados de manobras propulsivas. A Mecânica Newtoniana é suficiente na maioria dos casos de cálculo de trajetórias. Entretanto, a Relatividade Geral de Einstein é algumas vezes usada em ambientes de alta gravidade (por exemplo, orbitas próximas ao Sol) ou que requerem maior precisão O projeto em questão limita-se a Mecânica Newtoniana, mais especificamente, ao problema de dois-corpos. Esta será parte fundamental para aplicações posteriores. Como já foi dito o estudo de trajetórias lunares e interplanetárias realizadas mediante a aplicação de impulsos (mudanças instantâneas do vetor velocidade), utilizando a aproximação “patched-conic” pode ser usado em uma análise preliminar de missões espaciais lunares ou interplanetárias. Para os casos considerados as trajetórias lunares são coplanares com a órbita da Lua e as trajetórias interplanetárias são coplanares com as órbitas dos principais planetas do Sistema Solar. Isso pode ser explicado pelo fato de as mudanças de plano de órbita demandarem energia extra de propulsão (sendo, portanto, mais custosas). Nas trajetórias lunares foram analisados os efeitos do tempo de vôo da manobra e do ângulo de entrada na esfera de influência, sobre o delta-V necessário para a realização da manobra. Enquanto, nas trajetórias interplanetárias foram determinados os raios da esfera de influência de cada planeta, os ângulos fase para a realização do “rendez-vous” com o planeta alvo, a duração da manobra e os incrementos necessários para a realização da transferência de Hohmann. Finalmente, o problema de Gauss possui grande versatilidade em aplicações em Mecânica Orbital tais como: problemas de “rendez-vous” (encontro de naves espaciais), problemas de interceptação e de trajetórias interplanetárias. 10. Agradecimentos Ao Conselho Nacional de Desenvolvimento Cientifico e Tecnológico – CNPq, ao Instituto Tecnológico de Aeronáutica, e ao orientador Sandro da Silva Fernandes. 11. Referências Bate, R.R., Mueller, D.D. & White, J.E., 1971, “Fundamentals of Astrodynamics”, Dover, New York. Carter, T.E., 1984, “Fuel - Optimal Maneuvers of a Spacecraft Relative to a Point in Circular Orbit”, Journal of Guidance, Control and Dynamics, Vol 7, No 6, p.710-716. Carter, T.E. and Humi, M., 1987, “Fuel - Optimal Rendezvous Near a Point in General Keplerian Orbit”, Journal of Guidance, Control and Dynamics, Vol 10, No 6, p.567-574. Carter, T.E., 1989, “Effects of Propellant Mass Loss on Fuel - Optimal Rendezvous Near Keplerian Orbit”, Journal of Guidance, Control and Dynamics, Vol 12, No 1, pp.19-26. Carter, T.E., 1990, “New Form for the Optimal Rendezvous Equations Near a Keplerian Orbit”, Journal of Guidance, Control and Dynamics, Vol 13, No 1, p.183-186. Carter, T.E. and Brient, J., 1991, “Optimal Bounded - Thrust Space Trajectories Based on Linear Equations”, Journal of Optimization Theory and Applications, Vol 70, No 2, pp.299-317. Carter, T.E. and Brient, J., 1992, “Fuel - Optimal Rendezvous for Linearized Equations of Motion”, Journal of Guidance, Control and Dynamics, Vol 15, No 6, pp.1411-1416. Edelbaum,T.N.,1964, Öptimal Low-Thrust Rendez-vous and Station Keeping”, AIAA Journal, Vol. 2, pp.1196-1201. Edelbaum, T.N., 1967, “How Many Impulses?”, Astronautics & Aeronautics, Vol 5, No 11, pp. 64-69. Elsgolts, L., 1977, “Differential Equations and the Calculus of Variations”, Mir Publishers, Moscow, 440 p. Gobetz, F.W. and Doll. J.R., 1969, “A Survey of Impulsive Trajectories”, AIAA Journal, Vol 7, No 5, pp. 801-834. Hohmann, W., 1960, “The Attainability of Heavenly Bodies”, NASA Technical Translation F-44. Lawden, D.F., 1993, “Time - Closed Optimal Transfer by Two Impulses Between Coplanar Elliptical Orbits”, Journal of Guidance, Control and Dynamics, Vol 16, No 3, pp.585-587. Marchal, C., 1967a, “Synthése des Résultats Analytiques sur les Transferts Optimaux Entre Orbites Képlériennes (Durée Indifférente), ONERA TP no 482, 88 p. Marchal, C., 1967b,“Transferts Optimaux Entre Orbites Elliptiques (Durée Indifférente)”, ONERA Publication 131p. Marchal, C., 1976, “Optimization of Space Trajectories”, ONERA TP no 1976-107, 11 p. Marchal, C.; Marec, J.P. & Winn, C.B., 1967, “Synthése des Résultats Analytiques sur les Transferts Optimaux Entre Orbites Képlériennnes”, ONERA TP no 515, 35 p. Marec, J.P., 1965, “Transfeerts Orbitaux Économiques (Orbites elliptiques coplanaires Coaxiales. Durée Non-limitée), La Recherche Aérospatiale, No 105, pp. 11-21. Marec, J.P. , 1967, “Transferts Optimaux Entre Orbites Elliptiques Proches”, ONERA Publication no 121, 254 p. Prussing, J.E. e Conway, B.A., 1993, “Obital Mechanics”, Oxford University Press, New York, 194 p.
Baixar