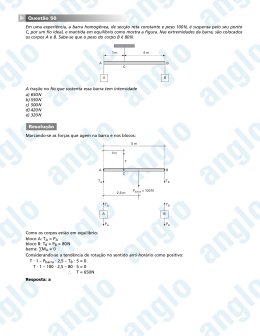
Determinação da matriz de rigidez a partir da matriz de flexibilidade 2.1 2 - DETERMINAÇÃO DA MATRIZ DE RIGIDEZ A PARTIR DA MATRIZ DE FLEXIBILIDADE 2.1 - Barra de pórtico tridimensional No capítulo 6 dos apontamentos da disciplina de Estruturas I verificou-se que a matriz de flexibilidade de uma barra de pórtico tridimensional (Figura 2.1) apresentava a seguinte constituição: fb=f dd L EA 0 0 = 0 0 0 0 0 0 0 L L3 + GAl' 2 3EI l 3 0 0 0 0 L L3 + GAl' 3 3EI l 2 0 0 0 0 L2 − 2 EI l 2 L2 2 EI l 3 0 L2 2 EI l 2 − L GI l1 0 0 L EI l 2 0 0 0 L2 2 EI l 3 0 . 0 0 L EI l 3 (2.1) l2 X 5 = Qdl5 X 2 = Qd 2 d e X3 = Q l d3 X 1 = Qdl1 X 4 = Qdl 4 l1 X 6 = Qdl 6 l3 Figura 2.1 - Barra de pórtico tridimensional Versão 1.0 (Fevereiro de 1999) Autor: Joaquim Barros Determinação da matriz de rigidez a partir da matriz de flexibilidade 2.2 Na disciplina de Estruturas I verificou-se ainda que a matriz de rigidez associada aos graus de l , pode ser obtida invertendo a correspondente matriz liberdade da extremidade direita da barra, K dd de flexibilidade, f , dd [ ] K dd = f dd l l −1 (2.2) em que l significa que as grandezas em causa estão definidas no referencial local da barra. Assim, EA L 0 0 l K dd = 0 0 0 0 12 EI l 3 L3 φ1 0 0 0 φ2 6 EI l 2 L2 φ1 L φ2 0 0 φ2 L2 0 4 EI l 2 L 0 6 EI l 3 − 2 φ1 L 0 . 0 0 4 EI l 3 φ1β1 L 0 6 EI l 2 0 GI l 1 0 0 L2 0 L3 0 6 EI l 3 0 12 EI l 2 0 − 0 φ2 β2 0 (2.3a) em que φ1 = 1 1 , φ2 = , 1 + 2α1 1 + 2α 2 β1 = 1 + α1 = 6 EI l 3 2 L α1 2 , β2 = 1 + α2 2 (2.3b) , (2.3c) 6 EI l 2 1 1 ' , α2 = GAl 2 L2 GAl' 3 (2.3d) e Al' 2 , Al' 3 são as áreas reduzidas de corte segundo os eixos l 2 e l 3 do referencial local da barra. Na Figura 2.2 representam-se os graus de liberdade de uma barra de pórtico tridimensional, em que, u1l = uel1 ; u2l = uel2 ; u3l = uel3 ; u4l = uel4 ; u5l = uel5 ; u6l = uel6 u7l = udl 1 ; u8l = udl 2 ; u9l = udl 3 ; u10l = udl 4 ; u11l = udl 5 ; u12l = udl 6 (2.4) pelo que: Versão 1.0 (Fevereiro de 1999) [ = [u ] U el = uel1 uel2 uel3 uel4 uel5 uel6 U dl udl 3 udl 4 udl 5 udl 6 l d1 udl 2 T ] (2.5a) T (2.5b) Autor: Joaquim Barros Determinação da matriz de rigidez a partir da matriz de flexibilidade 2.3 são os deslocamentos generalizados (deslocamentos e rotações) do nó esquerdo e direito da barra, no referencial local da barra. l3 l2 u5l u6l u2l u1l u3l u12l u4l u9l b e u8l u11l l u7l u10 l1 d Figura 2.2 - Graus de liberdade da barra de estrutura reticulada contínua tridimensional, no referencial local da barra. Na Figura 2.3 representam-se as forças que actuam numa barra de pórtico tridimensional, em que, Q1l = Qel1 ; Q2l = Qel2 ; Q3l = Qel3 ; Q4l = Qel4 ; Q5l = Qel5 ; Q6l = Qel6 (2.6) Q7l = Qdl1 ; Q8l = Qdl 2 ; Q9l = Qdl 3 ; Q10l = Qdl 4 ; Q11l = Qdl5 ; Q12l = Qdl 6 pelo que, [ Q l = Qel1 Qel2 e [ Q l = Qdl1 Qdl 2 d l3 Qe2l T Qel4 Qel5 Qel6 Qdl 3 Qdl 4 Qdl5 Qdl 6 . ] (2.7a) T (2.7b) l2 Qe1l Qe4l Qe5l ] Qel3 L b e Qdl1 Qdl 4 Qdl5 d Qdl 6 Qdl 2 Qdl 3 Qe6l l e3 Q l1 Figura 2.3 - Forças nodais numa barra de pórtico tridimensional. Para que a barra esteja em equilíbrio têm de se verificar as seguintes relações, Versão 1.0 (Fevereiro de 1999) Autor: Joaquim Barros Determinação da matriz de rigidez a partir da matriz de flexibilidade 2.4 Qel1 +Qdl1 =0 Qel2 +Qdl 2 =0 Qel3 +Qdl 3 =0 (2.8) Qel4 +Qdl 4 =0 Qel5 +Qdl 5 −L.Qdl 3 =0 Qel6 +Qdl 6 + L.Qdl 2 =0 ou 0 0 0 0 Qdl1 Qel1 − 1 0 l 0 0 0 Qdl 2 Qe 2 0 − 1 0 Qel3 0 0 −1 0 0 0 Qdl 3 l = 0 0 −1 0 0 Qdl 4 Qe 4 0 Q l 0 0 L 0 − 1 0 Qdl5 el5 0 0 − 1 Qdl 6 Qe 6 0 − L 0 (2.9) Q l = S ed Q l (2.10) 0 0 0 0 − 1 0 0 −1 0 0 0 0 0 0 −1 0 0 0 Sed = . 0 0 −1 0 0 0 0 0 L 0 −1 0 0 0 − 1 0 −L 0 (2.11) ou ainda, e d em que Assim, Q l = S ed Q l e d l = S ed K dd U dl (2.12) dado que l Q l = K dd U dl d Versão 1.0 (Fevereiro de 1999) (2.13) Autor: Joaquim Barros Determinação da matriz de rigidez a partir da matriz de flexibilidade 2.5 l pois K dd são as forças generalizadas que se aplicam na extremidade direita da barra para provocar deslocamentos unitários generalizados nesta extremidade, mantendo-se nulos os deslocamentos generalizados da extremidade esquerda (U el = 0 ). Como (2.12) estabelece uma relação entre as forças na extremidade esquerda ( Q l ) e os deslocamentos na extremidade direita ( U dl ), então, e l Q l = K ed U dl (2.14) l l K ed = S ed K dd (2.15) e pelo que, l representando K ed as forças generalizadas que devem ser aplicadas na extremidade esquerda, para manter nulos os deslocamentos generalizados desta extremidade, quando na extremidade direita se aplicam deslocamentos generalizados de valor unitário. Efectuado o produto matricial (2.15) obtém-se: EA − L 0 0 K ed = 0 0 0 0 − 12 EI l 3 L3 φ1 − 0 0 6 EI l 3 L2 0 0 0 0 0 12 EI l 2 3 L φ2 6 EI l 2 L2 φ1 0 − 0 0 − 0 φ2 6 EI l 2 L2 GI l 1 L 0 0 − 0 φ2 0 2 EI l 2 L 0 6 EI l 3 φ L2 1 0 0 0 2 EI l 3 φ1γ 1 L 0 φ2γ 2 (2.16a) em que γ 1 = 1 − α1 , γ 2 = 1 − α 2 . (2.16b) Do teorema da reciprocidade das forças sabe-se que: [ ] l l K de = K ed T , (2.17) l . A em que o sobreíndice T representa a transposta de uma matriz, neste caso, a matriz K ed l submatriz K de representa as forças generalizadas que devem ser aplicadas na extremidade direita, para manter nulos os deslocamentos generalizados desta extremidade, quando na extremidade esquerda se aplicam deslocamentos generalizados de valor unitário. Assim, Versão 1.0 (Fevereiro de 1999) Autor: Joaquim Barros Determinação da matriz de rigidez a partir da matriz de flexibilidade 2.6 l Q l = K de U el (2.18) d que substituída em (2.10) resulta: Q l = S ed Q l e d l = S ed K de U el (2.19) l = K ee U el em que l l K ee = S ed K de (2.20) apresentando a seguinte constituição: EA L 0 0 l K ee = 0 0 0 0 12 EI l 3 L3 φ1 0 0 0 0 3 L 0 φ2 − φ1 6 EI l 2 L2 0 0 − L2 L φ2 0 0 φ2 0 4 EI l 2 L 0 6 EI l 3 φ L2 1 0 . 0 0 4 EI l 3 φ1β1 L 0 6 EI l 2 GI l 1 0 0 L2 0 12 EI l 2 0 6 EI l 3 0 φ2 β2 (2.21) que representa as forças generalizadas que devem ser aplicadas na extremidade esquerda da barra, para provocar deslocamentos generalizados unitários nesta extremidade, mantendo-se nulos os deslocamentos generalizados da extremidade direita. Assim, a matriz de rigidez de uma barra de pórtico tridimensional, no referencial local desta barra, apresenta a seguinte constituição: Versão 1.0 (Fevereiro de 1999) Autor: Joaquim Barros Determinação da matriz de rigidez a partir da matriz de flexibilidade l K K = l ee l T K de = K ed l b EA 0 L 12 EI l 3 0 φ1 L3 0 0 0 0 0 0 6 EI l 3 l φ1 K ed 0 L2 = l EA K dd − 0 L 12 EI l 3 − φ1 0 L3 0 0 0 0 0 0 6 EI l 3 φ1 0 L2 Versão 1.0 (Fevereiro de 1999) 0 0 0 0 0 0 6 EI l 3 3 L φ2 6 EI l 2 − L 2 6 EI l 2 2 L L φ2 0 6 EI l 2 0 0 0 0 0 6 EI l 2 − 6 EI l 2 2 L 0 φ2 GI l1 L 0 2 EI l 2 0 0 L φ1 β1 6 EI l 3 2 L 0 φ 2γ 2 0 EA L φ1 0 − 6 EI l 3 L2 3 L φ1 0 12 EI l 3 L3 φ1 0 0 0 0 6 EI l 2 0 0 0 0 6 EI l 2 2 L 0 φ2 φ2 GI l1 L φ2 φ2 0 0 L3 Autor: Joaquim Barros L 0 12 EI l 2 φ1 GI l1 0 0 L2 L2 0 0 6 EI l 3 6 EI l 2 0 0 − − − 0 0 0 0 2 EI l 2 0 φ1γ 1 φ2 L L2 φ 2γ 2 φ2 0 0 4 EI l 2 0 0 L 6 EI l 3 φ 1 L2 0 0 0 2 EI l 3 φ1γ 1 L 0 6 EI l − 2 3 φ L 0 0 .(2.22) 0 4 EI l 3 φ1β1 L 0 0 L2 0 2 EI l 3 L 12 EI l 2 0 0 0 0 0 L φ2 0 0 0 L2 − 0 0 0 φ2 φ1 0 4 EI l 3 L3 L3 0 0 0 − 12 EI l 3 0 0 0 φ2 β 2 − 0 0 0 L 0 0 0 4 EI l 2 φ2 φ1 EA L 0 0 L2 12 EI l 2 − 0 GI l1 0 − − 0 12 EI l 2 − 2.7 φ2 β 2 Determinação da matriz de rigidez a partir da matriz de flexibilidade 2.8 2.2 - Matrizes de rigidez das restantes estruturas reticuladas As matrizes de rigidez de barras de estruturas articuladas planas, articuladas tridimensionais, pórticos planos e grelhas podem ser definidas por processo análogo ao descrito, partindo das correspondentes matrizes de flexibilidade, obtidas no capítulo 6 dos apontamentos da disciplina de Estruturas I. Contudo, estas matrizes podem ser determinadas de forma mais expedita, anulando as linhas e colunas de (2.22) correspondentes a graus de liberdade não representativos das estruturas em análise. 2.2.1 - Pórtico Plano Uma barra de pórtico plano apresenta os graus de liberdade representados na Figura 2.4. Considere-se que o pórtico está inscrito no plano x1 x2 , coincidente com o plano l 1l 2 . l2 u2l u5l u3l u6l u4l u1l l3 b i l1 j Figura 2.4 - Graus de liberdade da barra de pórtico plano, no referencial local da barra. Assim, a matriz de rigidez desta barra pode ser obtida de (2.22) suprimindo as linhas e as colunas correspondentes aos graus de liberdade nº 3, 4, 5, 9, 10 e 11, resultando, l K ee K bl = l l T K de = K ed EA L 0 l 0 K ed l = EA K dd − L 0 0 0 12 EI l 3 3 L 6 EI l 3 L2 φ1 φ1 6 EI l 3 L 4 EI l 3 L 3 L 6 EI l 3 L2 φ1 − φ1β1 0 − EA L φ1 L 2 EI l 3 L φ1 0 φ1γ 1 0 L3 6 EI l 3 L2 φ1 φ1 0 12 EI l 3 − L3 6 EI l 3 L2 6 EI l 3 φ L2 1 2 EI l 3 φ1γ 1 L . (2.23) 0 6 EI l 3 − 2 φ1 L 4 EI l 3 φβ L 1 1 0 12 EI l 3 − 6 EI l 3 2 0 0 0 12 EI l 3 EA L φ 2 0 − − 0 φ1 φ1 2.2.2 - Grelha Uma barra de grelha apresenta os graus de liberdade representados na Figura 2.5. Considere-se que a grelha está inscrita no plano x1 x2 , coincidente com o plano l 1l 2 . Versão 2.0 (Fevereiro de 2001) Autor: Joaquim Barros Determinação da matriz de rigidez a partir da matriz de flexibilidade l3 l2 l 3 u u1l 2.9 u6l u4l u5l l 1 u2l b i j Figura 2.5 - Graus de liberdade de uma barra de grelha, no seu referencial local. Assim, a matriz de rigidez desta barra pode ser obtida de (2.22) suprimindo as linhas e colunas correspondentes aos graus de liberdade nº 1, 2, 6, 7, 8 e 12, resultando, 12 EI l 2 φ2 3 L 0 6 EI l 2 l K ed − L2 φ2 l = 12 EI l 2 K dd − φ2 L3 0 6 EI l 2 − L2 φ2 l K ee K = l l T K de = K ed l b − 0 6 EI l 2 2 L GI l 1 L 0 − − 12 EI l 2 3 L 0 0 4 EI l 2 6 EI l 2 φ2 β2 L 6 EI l 2 0 φ1 L2 GI l 1 φ2 L 2 EI l 2 0 L L 0 φ2 0 L3 − GI l 1 φ2 GI l 1 0 φ2γ 2 0 − L2 12 EI l 2 0 φ2 6 EI l 2 L2 L φ2 0 − 6 EI l 2 2 L φ2 0 2 EI l 2 φ2γ 2 . (2.24) L 6 EI l 2 − 2 φ2 L 0 4 EI l 2 φ2 β2 L 2.2.3 - Estrutura articulada (treliça) Uma barra de estrutura articulada apresenta os graus de liberdade representados na Figura 2.6. Nestas estruturas sómente existe rigidez corresponde aos graus de liberdade segundo o eixo da barra. Contudo, para se simular o peso próprio das barras, considerou-se, ainda, os graus de liberdade u2l e u4l nas treliças planas e os graus de liberdade u2l , u3l , u5l e u6l nas treliças tridimensionais. l2 u4l u2l l3 l 3 u l l 1 u l3 i b l 2 u l 3 u j l2 u5l u6l u4l l 1 u i (a) b l1 j (b) Figura 2.6 - Graus de liberdade de uma barra de estrutura articulada plana (a) e tridimensional (b), no referencial local da barra. Versão 2.0 (Fevereiro de 2001) Autor: Joaquim Barros Determinação da matriz de rigidez a partir da matriz de flexibilidade 2.10 No caso de barra de treliça plana, a sua matriz de rigidez pode ser obtida de (2.22) anulando as linhas e as colunas correspondentes aos graus de liberdade nº 3 a 6 e 9 a 12, resultando, EA L l 0 K ed l = EA K dd − L 0 l K ee K bl = l l T K de = K ed EA L 0 EA L 0 0 − 0 0 0 0 0 . 0 0 (2.25a) Por sua vez, a matriz de rigidez de treliça espacial pode ser obtida de (2.22) anulando as linhas e as colunas correspondentes aos graus de liberdade nº 4 a 6 e 10 a 12, resultando, K K bl = l l T K de = K ed l ee EA L 0 l K ed 0 l = EA K dd − L 0 0 0 0 − 0 0 0 0 EA L 0 0 0 0 EA L 0 0 0 0 0 0 0 0 0 0 0 0 . 0 0 0 0 0 0 (2.25b) 2.3 – Exemplo de aplicação Uma barra de cinco metros de comprimento de um pórtico plano tem a seguinte matriz de flexibilidade: f = f b dd 28 0 0 1 = 0 7783 2315 . E 0 2315 926 Determine a correspondente matriz de rigidez. Resolução: −1 K = f dd l dd 0 0 3.571429e − 02 = E 0 5.01127e − 04 − 1.252819e − 03 . − 1.252819e − 03 4.211961e − 03 0 0 − 1 0 S ed = 0 − 1 0 . 0 − 5 − 1 Versão 2.0 (Fevereiro de 2001) Autor: Joaquim Barros Determinação da matriz de rigidez a partir da matriz de flexibilidade 2.11 0 0 − 3.571429e − 02 K =S ed K = E 0 − 5.01127e − 04 1.252819e − 03 0 − 1.252819e − 03 2.052133e − 03 l ed l dd [ ] K =K l de l T ed 0 0 − 3.571429e − 02 = E 0 − 5.01127e − 04 − 1.252819e − 03 . 0 1.252819e − 03 2.052133e − 03 0 0 3.571429e − 02 K =S ed K = E 0 5.01127e − 04 1.252819e − 03 . 0 1.252819e − 03 4.211961e − 03 l ee l de 2.4 - Barras de secção variável A formulação descrita deve ser utilizada no caso da determinação da matriz de rigidez de barra de secção variável. No capítulo 6 da disciplina de Estruturas I verificou-se que os termos da matriz de flexibilidade obtêm-se a partir da resolução de integrais. Para o caso geral de uma barra de pórtico tridimensional, um coeficiente genérico f ij obtém-se aplicando o teorema dos trabalhos virtuais às forças da configuração C X i nos deslocamentos da configuração C X f ij = ∫ N L Xi l1 N l1 j EA X dl 1 + ∫ Vl 2 Xi L Vl 2 j GAl' 2 X ∫ L M lX2 i Ml2 j EI l 2 Xj , resultando, X dl 1 + ∫ Vl 3 Xi L Vl 3 j GAl' 3 X dl 1 ∫ M L Xi l1 M l1 j GI l1 dl 1 + . X dl 1 + ∫ M lX3 i L Ml3 j EI l 3 (2.26) dl 1 Se a barra for de secção variável, os parâmetros A , Al' 2 , Al' 3 , I l 1 , I l 2 e I l 3 variam ao longo do comprimento da barra, pelo que os integrais (2.26) vêm em função de parâmetros que variam ao longo da barra. A resolução deste integrais pode oferecer alguma dificuldade sendo corrente resolvê-los por intermédio de técnicas de integração numérica, como por exemplo, a regra de Simpson (ou do trapézio). Determinada a matriz de flexibilidade desta forma, a obtenção da correspondente matriz de rigidez efectua-se a partir dos passos descritos nas anteriores secções. 2.5 – Exercícios propostos 1 - A matriz de flexibilidade de uma barra de pórtico plano com 5 metros de comprimento e com características mecânicas e materiais constantes é a seguinte (admitia E=30 GPa), F b = F dd ? ? 24 1 = ? 4859 1458 E ? ? 583 (Unidades de força em kN, de deslocamento em metros e de rotação em radianos) Versão 2.0 (Fevereiro de 2001) Autor: Joaquim Barros Determinação da matriz de rigidez a partir da matriz de flexibilidade 2.12 Determine a correspondente matriz de rigidez justificando todos os passos adoptados. 2 - A matriz de flexibilidade de uma barra de grelha com 5 metros de comprimento e com características mecânicas e materiais constantes é a seguinte, 0.096937 ? ? F b = F dd ? 0.013953 ? . − 0.029070 ? 0.011628 (Unidades de força em kN, de deslocamento em metros e de rotação em radianos) Determine a correspondente matriz de rigidez justificando todos os passos adoptados e indicando os teoremas considerados. 2.5 – Barras de secção qualquer de pórtico tridimensional Versão 2.0 (Fevereiro de 2001) Autor: Joaquim Barros Determinação da matriz de rigidez a partir da matriz de flexibilidade 2.13 2.5.1 - Introdução Nas estruturas reticuladas utiliza-se, por vezes, barras em que o centro de gravidade da secção não coincide com o centro de corte da secção dessas barras. Na Figura 2.7 representa-se algumas secções de barras deste tipo. C C G G C G G = Centro de Gravidade da secção C = Centro de Corte ou de Torção da secção Figura 2.7 – Secções em que o centro de gravidade não coincide com o centro de corte. O centro de corte coincide com o centro de torção, conforme se demonstra de seguida. Para este efeito, considere-se uma barra em consola com secção em que o centro de corte não coincide com o centro de gravidade, como é o caso da secção em U, representada na Figura 2.8. l2 l1 (l3) l2 FC =1 FC MG θ GC u CG l3 C u CG (l1) G θ GC MG =1 Figura 2.8 – Barra em consola, de secção U. Aplicando uma força unitária no centro de corte, C, da secção livre da barra, segundo o eixo l 2 , FC =1, a barra roda de um ângulo θ GC . Por sua vez, aplicando-se um momento unitário no centro de gravidade, G, da secção livre da barra M G =1, o ponto C desloca-se uCG segundo a direcção de FC . Segundo o teorema de Maxwell ou da reciprocidade dos deslocamentos sabe-se que, f ij = f ji (2.27a) que no caso presente se traduz por Versão 2.0 (Fevereiro de 2001) Autor: Joaquim Barros Determinação da matriz de rigidez a partir da matriz de flexibilidade 2.14 uCG = θ GC . (2.27b) Se o ponto C é o centro de corte, a barra fica submetida a flexão simples, não ocorrendo torção, pelo que θ GC = 0 . Assim, segundo (2.27b), uCG = 0 , pelo que o centro de corte não se desloca segundo l 2 quando actua um momento torsor na extremidade livre da barra. Daqui conclui-se que as secções transversais da peça rodam em torno do eixo longitudinal formado pelos centros de corte das secções transversais da barra. 2.5.2 - Deslocamentos No caso das barras em que o centro de corte não coincide com o centro de gravidade da secção, quer os deslocamentos correspondentes a forças transversais, quer a rotação correspondente a momento torsor, são aplicados no centro de corte da secção. Os restantes deslocamentos aplicam-se no centro de gravidade da secção, tal como se representa na Figura 2.9. l3C l2C l l3G x 2C l l x 3C u 2C ul3C l θ 1C C l2G l 1C l θ 2G l u 1G l θ 3G l 1G G Figura 2.9 – Graus de liberdade no centro de corte e no centro de gravidade de uma secção. As acções que actuam nas barras estão, geralmente, aplicadas no centro de gravidade das secções das barras, como é o caso do peso próprio das barras. Não é prático considerar que as forças correspondentes aos graus de liberdade u 2lC , u3lC e θ1lC sejam aplicados no centro de corte e as forças correspondentes aos restantes graus de liberdade sejam aplicados no centro de gravidade da secção. Assim, as forças nodais equivalentes serão aplicadas no centro de gravidade das secções das barras. Por este facto, será necessário reduzir todos os graus de liberdade ao centro de gravidade da secção (ver Figura 2.10). Este procedimento efectua-se da seguinte forma (ver Figuras 2.9 e 2.10) Versão 2.0 (Fevereiro de 2001) Autor: Joaquim Barros Determinação da matriz de rigidez a partir da matriz de flexibilidade 2.15 u1lG = u1lG u2lG = u2lC + x3lCθ1lC u3lG = u3lC − x2lCθ1lC θ =θ l 1G (2.28a) l 1C θ 2lG = θ 2lG θ 3lG = θ 3lG que em notação matricial fica, u1lG 1 l u2G 0 u3lG 0 l = θ1G 0 θ l 0 2lG θ 3G 0 0 0 0 1 0 x3lC 0 0 u1lG 0 0 u2lC 0 0 u3lC 0 0 θ1lC 1 0 θ 2lG 0 1 θ 3lG 0 1 − x2lC 0 0 1 0 0 0 0 0 0 (2.28b) ou U G = T CG ,G U CG l l (2.28c) em que [ U CG = u1lG l u2lC u3lC θ1lC θ 2lG θ 3lG ] T (2.29) é o vector dos deslocamentos com componentes referidas ao centro de corte e com componentes referidas ao centro de gravidade da secção, e [ U G = u1lG l u2lG u3lG θ1lG θ 2lG θ 3lG ] T (2.30) é o vector dos deslocamentos referidos ao centro de gravidade da secção. Versão 2.0 (Fevereiro de 2001) Autor: Joaquim Barros Determinação da matriz de rigidez a partir da matriz de flexibilidade 2.16 l3G =l 3 l2G =l 2 l θ 2G l l θ 3G u 2G l u 1G l u3G l θ 1G l 1G =l 1 G Figura 2.10 – Graus de liberdade no centro de gravidade de uma secção. 2.5.3 - Forças Em analogia com os deslocamentos, os esforços de corte e o momento torsor estão aplicados no centro de corte, enquanto o esforço axial e os momentos flectores estão aplicados no centro de gravidade (ver Figura 2.11a). l3C l2C l l3G x 2C l l x 3C V2C l V 3C l3 l 2G l2 l M1C C l 1C l M2G l M 2G l l N 1G l M 3G G l M3G l 1G V2G l N 1G l V 3G l1 G (a) l M 1G (b) Figura 2.11 – Esforços em C e G (a) e esforços unicamente em G (b). A redução das forças ao centro de gravidade efectua-se da seguinte forma (ver Figura 2.11) Versão 2.0 (Fevereiro de 2001) Autor: Joaquim Barros Determinação da matriz de rigidez a partir da matriz de flexibilidade ∑F ∑F ∑F ∑M ∑M ∑M l 1 = 0 ∴ N1lG = N1lG l 2 = 0 ∴ V2lG = V2lC l 3 = 0 ∴ V3lG = V3lC 2.17 l 1 = 0 ∴ M 1lG = M 1lC − V2lC x3lC + V3lC x2lC l 2 = 0 ∴ M 2lG = M 2lG l 3 = 0 ∴ M 3lG = M 3lG (2.31a) que em notação matricial fica N1lG 1 0 l 1 V2G 0 l V3G 0 0 l = l M 1G 0 − x3C M l 0 0 2lG 0 M 3G 0 0 0 0 N1lG 0 0 0 V2lC 0 0 0 V3lC 1 0 0 M 1lC 0 1 0 M 2lG 0 0 1 M 3lG 0 0 1 x2lC 0 0 (2.31b) ou Q G = S CG ,G Q CG l l (2.31c) em que [ Q CG = N1lG V2lC V3lC l M 1lC M 2lG M 3lG ] T (2.32) é o vector dos esforços com componentes referidas ao centro de corte da secção e com componentes referidas ao centro de gravidade da secção, e [ Q G = N1lG V2lG V3lG l M 1lG M 2lG M 3lG ] T (2.33) é o vector dos esforços aplicados no centro de gravidade da secção. Pode facilmente verificar-se que [[ S CG ,G = T CG ,G ] ] −1 −T [ = T CG ,G ] −T (2.34) pelo que (2.31c) pode também ter a seguinte configuração [ Q G = T CG ,G l ] −T l Q CG . (2.35) 2.5.4 – Matriz de rigidez Versão 2.0 (Fevereiro de 2001) Autor: Joaquim Barros Determinação da matriz de rigidez a partir da matriz de flexibilidade 2.18 As equações de equilíbrio de uma barra de secção com o centro de corte não coincidente com o centro de gravidade são as seguintes l l k ed ,CG U e,CG Q e ,CG l = l l k dd ,CG U d ,CG Q d ,CG l l k ee ,CG l k de ,CG (2.36a) ou k CG U CG = Q CG l l l (2.36b) em que o índice CG significa que as grandezas em causa foram obtidas considerando-se componentes de deslocamento e de força no centro de corte e no centro de gravidade das secções da extremidade esquerda (e) e direita (d) da barra. Desta forma, a matriz de rigidez pode ser obtida por intermédio do procedimento descrito na secção 2.1. Desenvolvendo (2.36) fica, k ee,CG U e ,CG + k ed ,CG U d ,CG = Q e ,CG l l l l l k de,CG U e ,CG + k dd ,CG U d ,CG = Q d ,CG l l l l l . (2.37) Substituindo (2.28c) e (2.35) em (2.37) obtém-se k ee,CG [TCG ,G ] U e ,G + k ed ,CG [TCG ,G ] U d ,G = [TCG ,G ] Q e ,G −1 l l −1 l T l l k de,CG [TCG ,G ] U e ,G + k dd ,CG [TCG ,G ] U d ,G = [TCG ,G ] Q d ,G −1 l l [ Multiplicando os termos de (2.38) por TCG ,G [T ] [T ] −T CG ,G −T CG ,G −1 l ] −T T l l . (2.38) obtém-se k ee,CG [TCG ,G ] U e ,G + [TCG ,G ] k ed ,CG [TCG ,G ] U d ,G = Q e ,G l −1 l −T −1 l l l k de,CG [TCG ,G ] U e ,G + [TCG ,G ] k dd ,CG [TCG ,G ] U d ,G = Q d ,G l −1 l −T −1 l l l . (2.39a) ou [T CG ,G ]−T 0 l k ee ,CG −T l [T CG ,G ] k de,CG 0 l −1 k ed ,CG [T CG ,G ] l k dd ,CG 0 l U le ,G Q e ,G . = [T CG ,G ]−1 U ld ,G Q ld ,G 0 (2.39b) Tendo em atenção (2.34), a anterior relação pode ser rescrita na seguinte forma S CG ,G 0 l 0 k ee ,CG S CG ,G k lde ,CG l T k ed ,CG [S CG ,G ] l k dd ,CG 0 l U el ,G Q e ,G . = [S CG ,G ]T U ld ,G Q ld ,G 0 (2.40a) ou Versão 2.0 (Fevereiro de 2001) Autor: Joaquim Barros Determinação da matriz de rigidez a partir da matriz de flexibilidade 2.19 T l l l Sˆ CG ,G k CG Sˆ CG ,G U G = Q G (2.40b) k U = QG l G l G l em que T l l k G = Sˆ CG ,G k CG Sˆ CG ,G (2.41) é a matriz de rigidez da barra com os graus de liberdade referidos ao centro de gravidade da secção da barra. Desenvolvendo (2.40a) fica, l T S CG ,G k ee ,CG [S CG ,G ] l T S CG ,G k de,CG [S CG ,G ] l T S CG ,G k ed ,CG [S CG ,G ] l T S CG ,G k dd ,CG [S CG ,G ] l U el ,G Q e ,G l = l U d ,G Q d ,G (2.42a) ou k lee,G l k de ,G l k ed ,G l k dd ,G l U le ,G Q e ,G l = l U d ,G Q d ,G (2.42b) em que k ee,G = S CG ,G k ee,CG [S CG ,G ] l l T k ed ,G = S CG ,G k ed ,CG [S CG ,G ] l l T k de,G = S CG ,G k de ,CG [S CG ,G ] l l T . (2.43) k dd ,G = S CG ,G k dd ,CG [S CG ,G ] l l T Desta forma, para simular o efeito do centro de corte não coincidir com o centro de gravidade de uma secção de uma barra é suficiente pré-multiplicar a matriz de rigidez convencional pela matriz T e pós-multiplicar o resultado por Sˆ , conforme indica a relação (2.41), ou efectuar os Sˆ CG ,G CG ,G produtos matriciais (2.43), os quais representam a conversão das submatrizes de rigidez associadas l aos graus de liberdade em C e em G ( K eel ,CG , K edl ,CG , K del ,CG , K dd ,CG ) para submatrizes de rigidez associadas a graus de liberdade em G. Versão 2.0 (Fevereiro de 2001) Autor: Joaquim Barros
Download