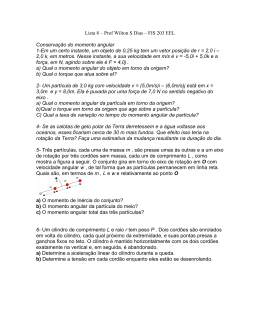
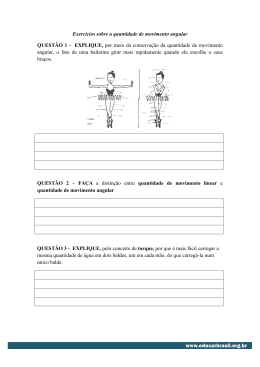
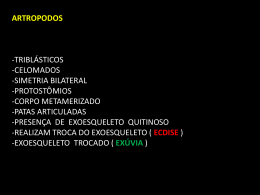
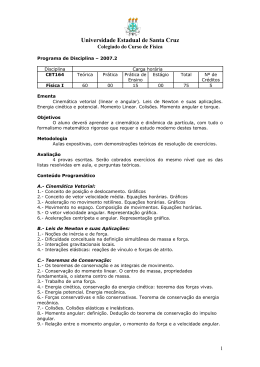
EXOESQUELETO ROBÓTICO PARA AUMENTAR A CAPACIDADE FÍSICA DO MEMBRO SUPERIOR HUMANO Daniela Sofía Cruz Garcés Dissertação de Mestrado apresentada ao Programa de Pós-graduação em Engenharia Mecânica, COPPE, da Universidade Federal do Rio de Janeiro, como parte dos requisitos necessários à obtenção do título de Mestre em Engenharia Mecânica. Orientador: Fernando Augusto de Noronha Castro Pinto Rio de Janeiro Agosto de 2013 EXOESQUELETO ROBÓTICO PARA AUMENTAR A CAPACIDADE FÍSICA DO MEMBRO SUPERIOR HUMANO Daniela Sofía Cruz Garcés DISSERTAÇÃO SUBMETIDA AO CORPO DOCENTE DO INSTITUTO ALBERTO LUIZ COIMBRA DE PÓS-GRADUAÇÃO E PESQUISA DE ENGENHARIA (COPPE) DA UNIVERSIDADE FEDERAL DO RIO DE JANEIRO COMO PARTE DOS REQUISITOS NECESSÁRIOS PARA A OBTENÇÃO DO GRAU DE MESTRE EM CIÊNCIAS EM ENGENHARIA MECÂNICA. Examinada por: ________________________________________________ Prof. Fernando Augusto de Noronha Castro Pinto, Dr.-Ing. ________________________________________________ Prof. Daniel Alves Castello, D.Sc ________________________________________________ Prof. Fernando Cesar Lizarralde, D.Sc ________________________________________________ Prof. Luciano Luporini Menegaldo, D.Sc RIO DE JANEIRO, RJ - BRASIL AGOSTO DE 2013 Garcés, Daniela Sofía Cruz Exoesqueleto robótico para aumentar a capacidade física do membro superior humano / Daniela Sofía Cruz Garcés. – Rio de Janeiro: UFRJ/COPPE, 2013. XV, 106 p.: il.; 29,7 cm. Orientador: Fernando Augusto de Noronha Castro Pinto. Dissertação (mestrado) – UFRJ/ COPPE/ Programa de Engenharia Mecânica, 2013. Referências Bibliográficas: p. 103-106. 1. Exoesqueleto. 2. Servo válvula pneumática. 3. Controle por modos deslizantes. I. Pinto, Fernando Augusto de Noronha Castro. II. Universidade Federal do Rio de Janeiro, COPPE, Programa de Engenharia Mecânica. III. Título. iii A Deus seja a glória. iv AGRADECIMENTOS Agradeço a meu Pai por seu amor, porque seu amor me da vida cada dia. Sem Você nada posso. Agradeço a minha família. Agradeço a meu amado Luis. Agradeço a todos os amigos que conheci neste país. Vocês são uma bênção para mim. Agradeço também a Fernando, meu orientador, por sua ajuda. Também agradeço ao CNPq e à FAPERJ pelo auxílio financeiro. v Resumo da Dissertação apresentada à COPPE/UFRJ como parte dos requisitos necessários para a obtenção do grau de Mestre em Ciências (M.Sc.) EXOESQUELETO ROBÓTICO PARA AUMENTAR A CAPACIDADE FÍSICA DO MEMBRO SUPERIOR HUMANO Daniela Sofía Cruz Garcés Agosto/2013 Orientador: Fernando Augusto de Noronha Castro Pinto Programa: Engenharia Mecânica O presente trabalho apresenta um exoesqueleto robótico desenvolvido para ampliar a força do braço humano, a fim de ajudar as pessoas a carregar pesos de até 10 kg de forma continua no tempo. O exoesqueleto tem dois graus de liberdade, os quais correspondem aos dois principais movimentos do braço humano. A estrutura foi usinada em alumínio pela sua propriedade de baixa densidade e por tanto, baixo peso. Em vez de motores elétricos, um cilindro pneumático compacto e uma servo válvula pneumática foram escolhidos como atuadores para cada junta. Os sensores usados são um potenciômetro linear e simples sensores de contato. Dois alvos foram selecionados para serem controlados. O primeiro é a velocidade, em que seu controle atua quando o usuário quer subir ou baixar o braço. O segundo alvo é a última posição, onde o usuário quer chegar e permanecer. Foi aplicado um controle de modos deslizantes com superfície deslizante PID. A efetividade do controle e desempenho do sistema foram testados ao aplicar diferentes cargas externas, obtendo sempre movimentos suaves e de velocidade moderada. Pelas respostas obtidas foi concluído que o exoesqueleto é apropriado para ser usado por pessoas. vi Abstract of Dissertation presented to COPPE/UFRJ as a partial fulfillment of the requirements for the degree of Master of Science (M.Sc.) ROBOTIC EXOSKELETON TO POTENTIATE THE HUMAN ARM CAPACITY Daniela Sofía Cruz Garcés August/2013 Advisor: Fernando Augusto de Noronha Castro Pinto Department: Mechanical Engineering This paper presents a robotic arm exoskeleton developed to magnify the human arm force in order to help people to carry heavy objects up to 10 kg continuously. The exoskeleton has two degrees of freedom, which corresponds to the two main human arm movements. The structure was built in aluminium because of its low density which means low weight. Instead of electric motors to drive each movement, a compact pneumatic cylinder and a servo pneumatic valve were chosen as actuators for each joint. The sensors used in this application are a linear potentiometer and simple contact sensors. Two targets were selected to be controlled. The first one is the velocity. The velocity control acts when the exoskeleton’s user wants to go up and down. The second target is the last position where user wants to remain. The control for this target is not the typical desired position control, because the final position depends on where or when the user wants to stop and leave the external load. A sliding mode control with PID sliding surface was applied. The effectiveness of the control and performance of the system were tested by applying different external weights, obtaining smooth movements with moderate speed. By the obtained responses it was concluded that the exoskeleton is suitable to be used by people. vii ÍNDICE 1 CAPÍTULO 1 ................................................................................................................... 1 Introdução ......................................................................................................................... 1 1.1 Motivação ......................................................................................................... 1 1.2 Objetivos........................................................................................................... 2 1.3 Revisão bibliográfica. ....................................................................................... 2 2 CAPÍTULO 2 ................................................................................................................... 7 Seleção do sistema de atuação. ......................................................................................... 7 2.1 Graus de liberdade e alcance de movimento .................................................... 9 2.1.1 2.2 Biomecânica do braço humano................................................................. 9 Seleção do tipo de sistema de atuação. ........................................................... 11 2.2.1 Sistema elétrico. ..................................................................................... 12 2.2.2 Sistema hidráulico. ................................................................................. 13 2.2.3 Sistema pneumático. ............................................................................... 14 2.3 Resultados da análise comparativa dos sistemas de atuação. ......................... 15 3 CAPÍTULO 3 ................................................................................................................. 16 Projeto do protótipo ........................................................................................................ 16 3.1 Seleção dos componentes do sistema ............................................................. 16 3.1.1 Cilindros pneumáticos. ........................................................................... 16 3.1.2 Estrutura ................................................................................................. 21 3.1.3 Válvula pneumática ................................................................................ 22 3.1.4 Sensores .................................................................................................. 24 4 CAPÍTULO 4 ................................................................................................................. 26 Modelagem matemática do sistema................................................................................ 26 4.1 Cinemática do exoesqueleto ........................................................................... 26 4.1.1 Cinemática direta .................................................................................... 27 4.1.2 Cinemática inversa ................................................................................. 29 viii 4.1.3 Relação entre os ângulos das juntas e o deslocamento do êmbolo de cada cilindro pneumático. ............................................................................................. 30 4.2 Dinâmica da estrutura mecânica ..................................................................... 36 4.2.1 4.3 Pontos de singularidade. ......................................................................... 42 Dinâmica das forças dos cilindros pneumáticos. ............................................ 44 4.3.1 Modelagem das pressões internas nas câmaras dos cilindros................. 45 4.3.2 Modelagem da válvula (vazões mássicas). ............................................. 52 4.3.3 Forças de atrito ....................................................................................... 58 5 CAPÍTULO 5 ................................................................................................................. 61 Sistema de Controle ........................................................................................................ 61 5.1 Controle por modos deslizantes...................................................................... 74 5.1.1 Escolha da superfície de deslizamento ................................................... 76 5.1.2 Escolha da lei do controle para manter a trajetória do sistema na superfície de deslizamento. ................................................................................... 77 5.1.3 Implementação do algoritmo para evitar a trepidação............................ 78 5.2 Simulação do sistema aplicando o controle por modos deslizantes. .............. 79 5.3 Controle por modos deslizantes com superfície deslizante PID. ................... 84 6 CAPÍTULO 6 ................................................................................................................. 86 Programação e resultados. .............................................................................................. 86 6.1 Programação. .................................................................................................. 86 6.2 Resultados....................................................................................................... 90 7 CAPÍTULO 7 ............................................................................................................... 101 Conclusões .................................................................................................................... 101 ix ÍNDICE DE FIGURAS Figura 1.1. Exoesqueletos desenvolvidos pela universidade Berkeley. A) Bleex. B) ExoHiker. C) Hulc. D) ExoClimber. E) eLEGS. F) Austin. Disponível em: http://bleex.me.berkeley.edu/research/exoskeleton/. Acesso em: Setembro, 2012. ......... 3 Figura 1.2. Exoesqueleto de perna que usa como atuador um músculo pneumático artificial (YEH et al., 2010). ............................................................................................. 4 Figura 1.3. Exoesqueleto de braço para dar suporte ao movimento do cotovelo (KIGUCHI et al., 2001). ................................................................................................... 5 Figura 1.4. Exoesqueleto de 7 graus de liberdade para potenciar a força do membro superior humano (PERRY et al., 2006). ........................................................................... 5 Figura 1.5. Localização de sensores para obter sinais mioelétricos (KIGUCHI et al., 2007). ................................................................................................................................ 6 Figura 2.1. Exoesqueleto fixo para reabilitação. (REINKENSMEYER et al., 2000). .... 8 Figura 2.2. Exoesqueleto portátil: HAL, da empresa japonesa Cyberdyne. (Custo de aluguel por mês $1000). Disponível em: http://www.cyberdyne.jp/english/robotsuithal/. Acesso em: Setembro, 2012. ............................................................................................ 9 Figura 2.3. Modelo de exoesqueleto de dois graus de liberdade. Acionamento por motores elétricos. ............................................................................................................ 13 Figura 3.1. Estrutura básica do exoesqueleto e principais forças. ................................. 17 Figura 3.2. Representação do caso extremo para selecionar o cilindro pneumático inferior. ........................................................................................................................... 18 Figura 3.3 Evolução da força do cilindro superior com relação ao deslocamento angular ϴ1. .................................................................................................................................. 19 Figura 3.4. Evolução da força do cilindro inferior com relação ao deslocamento angular ϴ2. ................................................................................................................................... 20 Figura 3.5 Foto de um cilindro pneumático CMPC da empresa Metal Work. .............. 20 Figura 3.6. Parte lateral do exoesqueleto mostrando a localização de cada cilindro pneumático. .................................................................................................................... 21 Figura 3.7 Ilustração dos movimentos angulares. ......................................................... 21 Figura 3.8. Vista lateral e frontal do exoesqueleto. ....................................................... 22 Figura 3.9. Foto da estrutura traseira de suporte. .......................................................... 22 x Figura 3.10 Válvula Festo MPYE-5-1/8-LF-010-B. ...................................................... 23 Figura 3.11 Elementos operacionais e conexões. 1). Conexão a terra, 2). Conexão elétrica, 3). Exaustores, 4). Portas para o fornecimento do ar comprimido, 5). Portas de trabalho, 6). Buracos para montagem, 7). Janela para inspeção do deslocamento. ........ 23 Figura 3.12 Representação da válvula 5/3 com acionamento elétrico. .......................... 24 Figura 3.13 Curva da direção do escoamento, vazão por tensão na entrada da válvula. 24 Figura 3.14. Potenciômetro linear de precisão de até 10 (KΩ) da empresa Vishay. ..... 25 Figura 3.15. Foto do potenciômetro fixo na estrutura do exoesqueleto. ....................... 25 Figura 4.1. Representação planar dos elos do exoesqueleto........................................... 27 Figura 4.2. Representação do manipulador para achar a cinemática inversa. ............... 29 Figura 4.3. Representação dos elos do exoesqueleto e dos seus principais comprimentos. ................................................................................................................ 31 Figura 4.4. Representação da parte superior................................................................... 31 Figura 4.5. Representação da parte inferior. .................................................................. 33 Figura 4.6. Representação dos comprimentos do cilindro superior. ............................. 34 Figura 4.7. Representação dos comprimentos do cilindro inferior................................ 35 Figura 4.8. Representação gráfica do sistema mecânico para determinar sua dinâmica. ........................................................................................................................................ 37 Figura 4.9. Esquema do manipulador para determinar o jacobiano espacial. ............... 43 Figura 4.10. Representação do volume de controle do sistema pneumático (cilindro – válvula). .......................................................................................................................... 46 Figura 4.11. Entrada do cilindro - câmara 1. .................................................................. 49 Figura 4.12. Saída do cilindro – câmara 2. ..................................................................... 50 Figura 4.13. Representação da distância que percorre o pistão. ..................................... 51 Figura 4.14. A) Deslocamento do carretel da válvula proporcional vs sinal de entrada. B) Resposta em frequência da válvula proporcional. (MENG et al., 2011)................... 53 Figura 4.15. Efeitos na vazão do ar pelo estrangulamento da válvula proporcional (KAZEROONI, 2004). ................................................................................................... 55 Figura 5.1. Baixar. Voltagem:5.3V ............................................................................... 64 Figura 5.2. Baixar. Voltagem:5.2V ............................................................................... 64 Figura 5.3. Baixar. Voltagem:5.1V ............................................................................... 64 Figura 5.4. Baixar. Voltagem:5V .................................................................................. 65 Figura 5.5. Baixar. Voltagem:4.9V ............................................................................... 65 xi Figura 5.6. Baixar. Voltagem:4.8V ............................................................................... 65 Figura 5.7. Baixar. Voltagem:4.7V ............................................................................... 66 Figura 5.8. Baixar. Voltagem:4.6V ............................................................................... 66 Figura 5.9. Baixar. Voltagem:4.5V ............................................................................... 66 Figura 5.10. Baixar. Voltagem:4.4V ............................................................................. 67 Figura 5.11. Baixar. Voltagem:4.3V ............................................................................ 67 Figura 5.12. Baixar. Voltagem:4 V ............................................................................... 67 Figura 5.13. Subir. Voltagem:5.5 V .............................................................................. 68 Figura 5.14. Subir. Voltagem:5.6 V. ............................................................................. 68 Figura 5.15. Subir. Voltagem:5.7 V .............................................................................. 69 Figura 5.16. Subir. Voltagem:5.8 V .............................................................................. 69 Figura 5.17. Subir. Voltagem:5.9 V .............................................................................. 69 Figura 5.18. Subir. Voltagem:6 V ................................................................................. 70 Figura 5.19. Subir. Voltagem:6.1 V .............................................................................. 70 Figura 5.20. Subir. Voltagem:6.2 V .............................................................................. 70 Figura 5.21. Subir. Voltagem:6.5 V .............................................................................. 71 Figura 5.22. Gráfico da voltagem de entrada na válvula para manter a posião vs o peso externo. ........................................................................................................................... 72 Figura 5.23 Modelo em malha aberta. ............................................................................ 73 Figura 5.24. Expansão do bloco do sistema de planta. ................................................... 73 Figura 5.25. Modelo em malha fechada do controle de velocidade. .............................. 74 Figura 5.26. Modelo em malha fechada do controle da última posição. ........................ 74 Figura 5.27. Representação do espaço de estado de . (UTKIN, 1977). .... 75 Figura 5.28. Sistema de estrutura variável assintoticamente estável. (UTKIN, 1977). 75 Figura 5.29. Represetação no espaço de estado do movimento de deslizamento (HOLLAND, C., 2002) .................................................................................................. 77 Figura 5.30. Função tangente hiperbólica. ..................................................................... 78 Figura 5.31. Sinal de controle, u, para valores da tangente hiperbólica: -1, 1. .............. 79 Figura 5.32.Sinal de controle, u, para . .......................... 79 Figura 5.33. Áreas de entrada e saída da válvula vs. sinal de entrada (MENG et al., 2011). .............................................................................................................................. 80 Figura 5.34. Programa da simulação computacional no ambiente Matlab/Simulink. ... 81 Figura 5.35. Posição angular do elo inferior obtida na simulação. ............................... 81 xii Figura 5.36. Resultado do erro ao longo do tempo. ...................................................... 82 Figura 5.37. Sinal de controle obtido da simulação. ...................................................... 82 Figura 5.38. Pressões obtidas na simulação. ................................................................. 83 Figura 5.39. Vazões mássicas das câmaras do cilindro pneumático .............................. 83 Figura 5.40. Força do cilindro pneumático. .................................................................. 84 Figura 5.41. Diagrama de blocos do controle por modos deslizantes com superfície deslizante PID. ................................................................................................................ 84 Figura 6.1. Aquisição de dados, trasformação da voltagem do potenciômetro a posição angular (em graus). ......................................................................................................... 87 Figura 6.2. Velocidade angular achada ao derivar a posição angular. .......................... 87 Figura 6.3. Controle para subir. ..................................................................................... 88 Figura 6.4. Controle para baixar. ................................................................................... 88 Figura 6.5. Controle para manter a última posição........................................................ 89 Figura 6.6. Sinal de saída............................................................................................... 89 Figura 6.7. Paniel para o usuário. .................................................................................. 90 Figura 6.8. Comparação da posição angular vs tempo dos controles SMC- por modos deslizantes e o controle PID+SMC (superficie deslizante PID). Para uma voltagem entre 4.8 e 5.7 Volts. ....................................................................................................... 91 Figura 6.9. Comparação da posição angular vs tempo dos controles SMC- por modos deslizantes e o controle PID+SMC (superficie deslizante PID). Para uma voltagem entre 4.7 e 5.7 Volts. ....................................................................................................... 91 Figura 6.10. Comparação do erro de posição vs tempo dos controles SMC- por modos deslizantes e o controle PID+SMC (superficie deslizante PID). Para uma voltagem entre 4.8 e 5.7 Volts. ....................................................................................................... 92 Figura 6.11. Comparação do erro de posição vs tempo dos controles SMC- por modos deslizantes e o controle PID+SMC (superficie deslizante PID). Para uma voltagem entre 4.7 e 5.7 Volts. ....................................................................................................... 92 Figura 6.12. Comparação do sinal de controle vs tempo dos controles SMC- por modos deslizantes e o controle PID+SMC (superficie deslizante PID). Para uma voltagem entre 4.8 e 5.7 Volts. ....................................................................................................... 93 Figura 6.13. Comparação do sinal de controle vs tempo dos controles SMC- por modos deslizantes e o controle PID+SMC. Para uma voltagem entre 4.7 e 5.7 Volts. ............ 93 xiii Figura 6.14 . Erro vs Derivada do erro. Controle SMC. Para uma voltagem entre 4.8 V e 5.7 V. ........................................................................................................................... 94 Figura 6.15. Erro vs Derivada do erro. Controle SMC. Para uma voltagem entre 4.7 V e 5.7 V. ........................................................................................................................... 94 Figura 6.16. Erro vs Derivada do erro vs Integral do erro. Controle PID+SMC. Para uma voltagem entre 4.8 e 5.7 Volts. ............................................................................... 95 Figura 6.17. Erro vs Derivada do erro vs Integral do erro. Controle PID+SMC. Para uma voltagem entre 4.7 e 5.7 Volts. ............................................................................... 95 Figura 6.18. Posição angular por tempo para 2 Kg de carga externa. Voltagem entre 4.7V e 5.7V..................................................................................................................... 96 Figura 6.19. Velocidade angular por tempo para 2 Kg de carga externa. Voltagem entre 4.7V e 5.7V..................................................................................................................... 97 Figura 6.20. Erro ao longo do tempo para 2 Kg de carga externa. Voltagem entre 4.7V e 5.7V. ............................................................................................................................... 97 Figura 6.21. Posição angular por tempo para 4 Kg de carga externa. Voltagem entre 4.7V e 5.7V..................................................................................................................... 98 Figura 6.22. Velocidade angular por tempo para 4 Kg de carga externa. Voltagem entre 4.7V e 5.7V..................................................................................................................... 98 Figura 6.23. Erro ao longo do tempo para 4 Kg de carga externa. Voltagem entre 4.7V e 5.7V. ............................................................................................................................... 98 Figura 6.24. Posição angular por tempo para 6 Kg de carga externa. Voltagem entre 4.7V e 5.7V..................................................................................................................... 99 Figura 6.25. Velocidade angular por tempo para 6 Kg de carga externa. Voltagem entre 4.7V e 5.7V..................................................................................................................... 99 Figura 6.26. Erro ao longo do tempo para 6 Kg de carga externa. Voltagem entre 4.7V e 5.7V. ............................................................................................................................. 100 xiv ÍNDICE DE TABELAS Tabela 2.1. Rotações do ombro humano. Disponível em: www.amicivirtual2.com.ar/Anatomia/09. Acesso em: Agosto, 2012. ........................... 10 Tabela 2.2. Principais movimentos do cotovelo humano. Disponível em: www.amicivirtual2.com.ar/Anatomia/10. Acesso em: Agosto, 2012. ........................... 11 Tabela 2.3. Especificações preliminares (torques e potência do exoesqueleto). ............ 12 Tabela 3.1. Parâmetros dos cilindros pneumáticos selecionados. ................................. 20 Tabela 4.1. Tipos de vazão do ar através da válvula proporcional segundo a razão de pressões........................................................................................................................... 54 xv 1 CAPÍTULO 1 Introdução 1.1 Motivação Para muitos trabalhos que requerem esforço físico elevado, a capacidade humana é limitada, podendo ser aumentada mediante o uso de um dispositivo externo com acionamento ativo. O presente trabalho considera o problema de projetar, construir, implementar e validar um exoesqueleto do membro superior humano para melhorar a capacidade física das pessoas ao levantar objetos, o qual é possível ao amplificar o torque gerado pelos músculos do usuário. Desta maneira, obtém-se menor esforço e desgaste físico que o indivíduo apresenta ao continuamente levantar objetos num tempo prolongado. Adicionalmente, podem-se evitar possíveis lesões físicas nas juntas do cotovelo ou do ombro enquanto cargas são manipuladas. O trabalho do exoesqueleto é levantar a maior porcentagem do peso dos objetos, enquanto a pessoa levanta uma porcentagem muito menor. O sistema composto pelo braço humano e o exoesqueleto trabalha como um sistema simbiótico, pois há uma interação entre os comandos do usuário e a resposta do dispositivo robótico. O sistema pessoa – máquina tem uma interação contínua e, graças ao controle, o dispositivo robótico responde às necessidades e intenções da pessoa de maneira rápida, efetiva e o mais naturalmente possível. Alguns exoesqueletos para potenciar a capacidade física do braço humano têm sido desenvolvidos anteriormente, mas a motivação do presente trabalho é que o usuário possa carregar 10 Kg com uma boa velocidade (considerando a velocidade normal do 1 braço humano) e sem que seu braço tenha que fazer esforço nem apresentar alguma lesão física. 1.2 Objetivos. O objetivo principal deste trabalho é desenvolver um exoesqueleto de braço para aumentar ou potencializar a capacidade física humana para carregar 10 Kg continuamente sem obter desgaste físico nem nos músculos do braço, nem nas articulações. Para alcançar esse objetivo, é importante considerar também os seguintes pontos: estudar o comportamento do movimento do braço humano, projetar um sistema robótico tipo exoesqueleto para o braço humano, e estudar e implementar algoritmos para controlar o exoesqueleto robótico para obter uma resposta rápida e o mais natural possível. 1.3 Revisão bibliográfica. Exoesqueleto ou órtese é um dispositivo aplicado na parte externa de uma ou várias partes do corpo humano. Estes dispositivos são criados com várias finalidades, mas em geral, servem para apoiar os movimentos e/ou melhorar as capacidades do corpo humano. Algumas outras finalidades na criação de exoesqueletos são: Apoiar o movimento humano quando a pessoa não tem a força suficiente para se movimentar (capacidade física limitada), por exemplo: idosos e pessoas com deficiência física. Prevenir lesões, por exemplo, no caso de trabalhos repetitivos ou que precisam de um esforço físico alto. Impedir o movimento humano indesejado que se apresenta com alguma doença neuromotora. Apoiar a reabilitação das pessoas com alguma deficiência física. Criar ambientes virtuais para teleoperação ou para alguma interação específica. Estudos e investigação biomecânica das partes do corpo humano. 2 Dependendo da aplicação do exoesqueleto, o controle pode ser feito para: Desenvolver uma tarefa específica, ou seja, um movimento previamente definido (como no caso dos movimentos na reabilitação ou fisioterapia). Acompanhar os movimentos comandados pelo usuário do exoesqueleto. O primeiro exoesqueleto robótico do corpo humano, Hardiman, foi criado pela General Electric em 1965. Este exoesqueleto foi concebido com a ideia de aumentar a capacidade física do corpo humano para levantar 680 Kg. Essa ideia era muito inovadora, mas a tecnologia dos atuadores, dos materiais, das fontes de energia e os tipos de controle de sistemas nessa época, fizeram possível somente a criação de um exoesqueleto de braço com movimentos bruscos e que não apresentava segurança para que uma pessoa pudesse usá-lo. Pelo avanço da tecnologia nos atuadores e nas fontes de energia, diversos protótipos têm sido desenvolvidos ao longo das últimas décadas. Por exemplo, a Figura 1.1 mostra os exoesqueletos criados pela Universidade Berkeley dos Estados Unidos: BLEEX Exoskeleton (ZOSS et al., 2005), (STEGER et al., 2006), ExoHiker, Hulc, ExoClimber, para a área militar. Enquanto que no setor da reabilitação têm sido desenvolvidos os exoesqueletos eLEGS e Austin. A B C D E F Figura 1.1. Exoesqueletos desenvolvidos pela universidade Berkeley. A) Bleex. B) ExoHiker. C) Hulc. D) ExoClimber. E) eLEGS. F) Austin. Disponível em: http://bleex.me.berkeley.edu/research/exoskeleton/. Acesso em: Setembro, 2012. 3 Em geral, os campos mais beneficiados pelo desenvolvimento dos exoesqueletos têm relação com aplicações militares (para aumentar a capacidade dos militares de carregar armas e outros equipamentos) e com a reabilitação física. Além dos atuadores elétricos e eletromecânicos, os atuadores pneumáticos também têm sido usados nos exoesqueletos. A obtenção de um modelo matemático exato dos sistemas pneumáticos é uma tarefa complexa, devido às não linearidades do sistema causadas principalmente pela compressibilidade do ar, atrito e vazão através de componentes como válvulas. Todo este comportamento não linear dos sistemas pneumáticos faz que os controles tradicionais de força, posição dos atuadores ou controles lineares baseados em modelos simplificados, não sejam as melhores opções para obter bons resultados e desempenho (McLATCHEY et al. 2006, KIGUCHI et al., 2007). Nos últimos anos alguns atuadores pneumáticos, chamados genericamente como músculos pneumáticos artificiais, têm sido desenvolvidos especialmente para a aplicação dos exoesqueletos, com o objetivo de ter um sistema com massa muito menor e ao mesmo tempo ser mais parecido ao músculo humano como mostra a Figura 1.2. No entanto, o controle necessário para obter uma resposta suave ainda é um desafio. Figura 1.2. Exoesqueleto de perna que usa como atuador um músculo pneumático artificial (YEH et al., 2010). Além do avanço dos atuadores, a evolução dos exoesqueletos tem relação com o número de graus de liberdade e o tipo de controle usado no sistema. Existem exoesqueletos de dois, três e sete graus de liberdade controlados mediante sinais mioelétricos do braço humano e controle por impedância (KIGUCHI et al., 2001, 4 PERRY et al., 2006) como por exemplo nos exoesqueletos mostrados na Figura 1.3 e na Figura 1.4. Figura 1.3. Exoesqueleto de braço para dar suporte ao movimento do cotovelo (KIGUCHI et al., 2001). Figura 1.4. Exoesqueleto de 7 graus de liberdade para potenciar a força do membro superior humano (PERRY et al., 2006). A melhoria do controle trás benefícios ao tempo de resposta, à precisão, e também à obtenção de movimentos suaves. A evolução do controle nos exoesqueletos de braço começou com o controle por impedância (PERRY et al., 2006), depois com a combinação da impedância e os sinais mioelétricos (sinais obtidos dos músculos e gerados pelo movimento ou intenção do movimento) (KIGUCHI et al., 2001, PERRY et al., 2006). Finalmente, chegou-se a controles mais complexos que procuram uma combinação da impedância, sinais mioelétricos e redes neurais (CAVALLARO et al., 2006), até controle neuro-fuzzy (KIGUCHI et al., 2007, GOPURA et al., 2009). A Figura 1.5 apresenta pontos importantes para a localização dos sensores dos sinais mioelétricos (KIGUCHI et al., 2007). 5 Figura 1.5. Localização de sensores para obter sinais mioelétricos (KIGUCHI et al., 2007). Na prática, quanto maior é o número de graus de liberdade do exoesqueleto, mais complexo precisa ser o controle para obter uma boa resposta. Até agora, muitos dos exoesqueletos desenvolvidos não têm sido construídos comercialmente, devido principalmente às limitações tecnológicas de atuadores de baixo peso, a capacidade limitada das fontes de armazenamento de energia e a dificuldade do seu controle (RUÍZ, 2008). 6 2 CAPÍTULO 2 Seleção do sistema de atuação. A geração do movimento no ser humano se baseia num fluxo de informação entre as distintas estruturas ou componentes do sistema motriz. Este fluxo de informação percorre algumas etapas, as quais implicam desde os receptores sensoriais e processamento no cérebro, com o objetivo de obter os respectivos comandos para gerar um determinado movimento (movimento resultante dos músculos). Em geral, é possível considerar três tipos principais de arquiteturas para a estrutura de um exoesqueleto robótico (ZOSS et al., 2005): Arquitetura antropomórfica. Com esta arquitetura a estrutura do exoesqueleto robótico copia exatamente a estrutura do corpo humano. Por exemplo, a junta do cotovelo do exoesqueleto coincide em posição com o cotovelo humano. Também, o comprimento do antebraço do exoesqueleto tem que ser igual ao comprimento do antebraço humano. Esta arquitetura apresenta algumas vantagens como também desvantagens. A vantagem principal é a cinemática do exoesqueleto repetir exatamente a cinemática do usuário, pelo qual não há perigo de choque entre os elos. Entre algumas desvantagens, tem-se a dificuldade tecnológica para uma mesma junta do exoesqueleto apresentar todos os tipos de movimentos ou graus de liberdade que têm as juntas do corpo humano, como por exemplo, o ombro humano com três rotações numa mesma junta. Outra desvantagem surge quando existem vários usuários porque quando o exoesqueleto é projetado com uma arquitetura antropomórfica, ele tem relativamente as mesmas dimensões que as 7 partes do corpo de cada usuário, por tanto, outra pessoa já não seria capaz de usar o mesmo exoesqueleto. Arquitetura não-antropomórfica. Seu desenho não segue o modelo humano. Existe uma grande variedade de possibilidades de desenho para um exoesqueleto, desde que o movimento obtido não apresente choques com o usuário, nem posições ou configurações que o ser humano não seja capaz de fazer. Arquitetura pseudo-antropomórfica. Esta arquitetura procura obter uma estrutura parecida à estrutura humana para garantir segurança no movimento e evitar qualquer choque e possíveis pontos de singularidade. Por exemplo, a junta do cotovelo humano apresenta 2 graus de liberdade, poderia-se ter uma arquitetura pseudo-antropomórfica ao colocar a junta do exoesqueleto sobre a junta do cotovelo humano, mas sem apresentar mais que 1 grau de liberdade. Segundo a portabilidade do dispositivo, um exoesqueleto pode ser: Não portátil ou fixo. O exoesqueleto é fixado ou ancorado a uma estrutura rígida imóvel como o chão ou a uma parede, a qual, sendo o apoio de todo o sistema, suporta as forças de reação. Em geral, esta característica se apresenta em dispositivos de alto peso, os quais normalmente são acionados por atuadores convencionais. Um exemplo de exoesqueleto não portátil é apresentado na Figura 2.1. Figura 2.1. Exoesqueleto fixo para reabilitação. (REINKENSMEYER et al., 2000). 8 Portátil. O objetivo deste exoesqueleto é a mobilidade como mostra a Figura 2.2. Este tipo de exoesqueleto é apoiado em dispositivos capazes de movimentar-se, por exemplo, as cadeiras de rodas, ou diretamente sobre o usuário, onde a própria pessoa suporta as forças de reação. Ao projetar um exoesqueleto portátil é importante ter em conta os fatores de peso (tanto dos atuadores como da estrutura) e de volume. Figura 2.2. Exoesqueleto portátil: HAL, da empresa japonesa Cyberdyne. (Custo de aluguel por mês $1000). Disponível em: http://www.cyberdyne.jp/english/robotsuithal/. Acesso em: Setembro, 2012. 2.1 Graus de liberdade e alcance de movimento 2.1.1 Biomecânica do braço humano O braço humano possui três articulações: ombro, cotovelo e pulso. A articulação do ombro apresenta 3 tipos de rotações, a do cotovelo 2 rotações e a do pulso 3 rotações. Ombro. Os principais movimentos obtidos pelas rotações puras do ombro são apresentados na Tabela 2.1. 9 Tabela 2.1. Rotações do ombro humano. Disponível em: www.amicivirtual2.com.ar/Anatomia/09. Acesso em: Agosto, 2012. Em torno do Movimentos obtidos plano Abdução Adução Flexão Extensão Rotação interna Rotação externa Frontal Longitudinal Transversal Cotovelo. Os principais tipos de movimento gerados nesta articulação são apresentados na Tabela 2.2. 10 Tabela 2.2. Principais movimentos do cotovelo humano. Disponível em: www.amicivirtual2.com.ar/Anatomia/10. Acesso em: Agosto, 2012. Flexão \ Extensão Pronação \ Supinação Das arquiteturas anteriormente mencionadas, a arquitetura escolhida para o presente projeto é a pseudo-antropomórfica. O exoesqueleto contará com 2 graus de liberdade, isto é: 1 grau de liberdade: rotação no ombro correspondente ao movimento de flexão do braço e 1 grau de liberdade: rotação no cotovelo correspondente ao movimento de flexão\extensão do antebraço. Estes são os principais movimentos relacionados à atividade física de levantar pesos. Cada um dos graus de liberdade terá um alcance de 90˚. 2.2 Seleção do tipo de sistema de atuação. Para selecionar o sistema que atuará sobre o exoesqueleto e obter os movimentos desejados, realiza-se um estudo dos principais sistemas de atuação tendo em conta as especificações gerais mostradas na Tabela 2.3. Estas especificações contêm: como carga externa: 10 Kg, um comprimento de 0.22 m para o antebraço e de 0.25 m para o braço. Estes comprimentos foram escolhidos segundo comprimentos standard do braço e antebraço humanos. A velocidade angular considerada foi escolhida como uma velocidade média dos movimentos do braço. 11 Tabela 2.3. Especificações preliminares (torques e potência do exoesqueleto). Os principais sistemas de atuação que são considerados na automatização da indústria são: Sistema elétrico. Sistema pneumático. Sistema hidráulico. Segundo o tipo de aplicação, cada um destes sistemas de atuação apresenta características que podem ser vantajosas ou desvantajosas. 2.2.1 Sistema elétrico. O torque necessário para obter o movimento desejado de cada uma das partes do exoesqueleto é proporcionado diretamente por motores de corrente contínua. Estes motores são colocados exatamente sobre as juntas do corpo humano, isso é, um motor é colocado no exoesqueleto na posição do ombro e outro motor sobre o cotovelo. É importante garantir que os motores se encontrem alinhados perpendicularmente às juntas do cotovelo e do ombro para obter a maior eficiência na resposta do movimento desejado. Devido às especificações (Tabela 2.1) para elevar uma carga externa de 10 (Kg) (além do pequeno peso da estrutura), é necessário gerar torques elevados. Por isso, não é possível usar somente motores DC, mas é importante selecionar motoredutores para obter uma velocidade baixa e um torque alto o suficiente. Com esta necessidade, foram encontrados os motoredutores adequados no mercado, porém eles apresentam um peso muito alto (aproximadamente 6 Kg). A Figura 2.3 mostra o primeiro protótipo desenvolvido no presente trabalho. Ele exemplifica o exoesqueleto ativado por um sistema eléctrico. 12 Figura 2.3. Modelo de exoesqueleto de dois graus de liberdade. Acionamento por motores elétricos. Os motores elétricos são comumente usados nos exoesqueletos para aplicações de reabilitação, teleoperação entre outros onde o torque requerido não é muito grande. Neste caso, os motores elétricos apresentam as seguintes vantagens: Peso, tamanho e custo relativamente baixos. A instalação dos equipamentos é relativamente fácil. Obtenção de alta potência e rendimento. Parâmetros com facilidade de integração no controle. No caso de um controle de força os sistemas mais convenientes são os sistemas baseados em algum fluido, como no caso dos sistemas hidráulicos ou pneumáticos porque a força é controlada mediante o controle da pressão do fluido (McLATCHEY et al., 2006). 2.2.2 Sistema hidráulico. Algumas das vantagens de usar um sistema hidráulico são: Possibilidade de se obter forças maiores que as forças obtidas com sistemas elétricos ou pneumáticos, devido à característica incompressível dos líquidos. As velocidades obtidas são menores em comparação aos sistemas elétricos ou pneumáticos. Algumas desvantagens são: 13 Os componentes deste sistema requerem uma manutenção constante. Os atuadores hidráulicos, bombas, válvulas entre outros equipamentos básicos que compõem este sistema são em general mais caros que os componentes elétricos, mas ao mesmo tempo apresentam uma maior relação de força / peso que compensa seu preço. A desvantagem deste tipo de aturadores para o caso do exoesqueleto de braço é que mesmo sendo possível obter forças altas com pressões altas, eles apresentam pesos muito maiores. Atualmente são usados nos exoesqueletos de pernas ou robôs pesados. 2.2.3 Sistema pneumático. Um sistema pneumático apresenta algumas vantagens sobre outros tipos de sistemas, entre elas se encontram: O fluido de trabalho é o ar, o qual é abundante e ilimitado. O ar é um elemento antideflagrante com o qual este sistema não apresenta o risco de iniciação ou propagação de uma explosão em ambientes inflamáveis. Não são requeridos canais de retorno, pois uma vez a tarefa termina, o ar pode voltar diretamente à atmosfera. Devido ao ar comprimido ser armazenado em acumuladores e ser possível transportar estes acumuladores, há a possibilidade de realizar as tarefas onde e quando sejam necessárias. Devido à característica compressível do ar, é possível atingir pressões altas; as quais são transformadas em forças e torques altos. O circuito pneumático apresenta uma alta relação de força – peso. Esta relação é muito importante sobre tudo em aplicações de robótica, onde é preciso que o sistema de atuação apresente um baixo peso, mas ao mesmo tempo, consiga exercer uma força ou torque alto. O controle de sistemas pneumáticos apresenta maior complexidade que o controle de sistemas mecânicos, elétricos e inclusive dos hidráulicos devido a seu comportamento não linear. Em general os sistemas mecânicos, elétricos e hidráulicos apresentam um comportamento dinâmico de até segunda ordem, 14 enquanto que a modelagem da dinâmica dos atuadores pneumáticos pode apresentar equações de até quarta ordem. Além disso, ao ar apresentar uma baixa ou nenhuma lubrificação, o atrito estático e dinâmico presente é alto. 2.3 Resultados da análise comparativa dos sistemas de atuação. Os motores elétricos representam uma boa opção como atuadores nos exoesqueletos robóticos porque sua instalação é fácil e seu controle não apresenta maiores inconvenientes. Porém, no caso do exoesqueleto de braço para aumentar a capacidade física, é necessário um torque alto e uma velocidade angular baixa, pelo qual é imprescindível colocar um redutor de velocidade para o motor elétrico. Em geral, um sistema motoredutor apresenta um peso e custo altos. Mediante os atuadores hidráulicos e pneumáticos é possível levantar maiores cargas externas, mas mesmo mantendo os devidos parâmetros de segurança, eles sempre apresentam vazamentos. Estes vazamentos, no caso dos sistemas hidráulicos, podem representar um problema ou perigo para o usuário do exoesqueleto, mas no caso dos sistemas pneumáticos, esses vazamentos são de ar, não representando nenhum perigo. Pelos motivos anteriormente apresentados, o sistema de acionamento escolhido para o exoesqueleto de braço deste projeto é o sistema pneumático, onde o maior inconveniente fica no seu comportamento não linear devido à fricção no pistão e a compressibilidade do ar. 15 3 CAPÍTULO 3 Projeto do protótipo As considerações feitas para selecionar os componentes do sistema pneumático escolhidas são as seguintes: Sistema pneumático de atuação. 1 rotação na junta superior, com deslocamento angular θ1, e 1 rotação na junta inferior, com deslocamento angular θ2. Portanto, dois cilindros pneumáticos são necessários para gerar os movimentos: um cilindro para o braço e o outro para o antebraço. Cada junta deve apresentar um deslocamento angular não maior que 90˚. A máxima força ou carga externa será de 10 (Kg). Uma estrutura básica do exoesqueleto foi projetada no software Solidworks. Esta estrutura é mostrada na Figura 3.1 3.1 Seleção dos componentes do sistema 3.1.1 Cilindros pneumáticos. Os primeiros cálculos foram feitos para obter uma estimativa da força que cada cilindro pneumático deve exercer para cumprir com o máximo de carga especificado ou força externa. Para isso, foram desenvolvidas equações da dinâmica do mecanismo com as principais forças aplicadas na estrutura. 16 O esquema apresentado na Figura 3.1 foi usado para realizar estes primeiros cálculos. Figura 3.1. Estrutura básica do exoesqueleto e principais forças. Fp1 e Fp2 representam as forças de cada cilindro pneumático. W1 e W2 são os pesos de cada elo, enquanto que Fext representa a força do peso externo no efetuador do manipulador. O ponto D representa a junta superior do exoesqueleto (articulação do ombro humano), enquanto que o ponto F representa a junta inferior do exoesqueleto (articulação do cotovelo humano). ⃗⃗⃗⃗⃗⃗ e ⃗⃗⃗⃗⃗⃗⃗⃗⃗ são vetores de posição desde o ponto F até as forças W2 e Fext respectivamente. A seguir, como exemplo, é apresentado o cálculo para estimar a força máxima que o cilindro pneumático inferior deve atingir. O torque no ponto F devido à força externa e ao peso do elo inferior é encontrado pela seguinte equação: ⃗⃗⃗⃗ ⃗⃗⃗⃗⃗⃗ ⃗⃗⃗⃗⃗⃗ ⃗⃗⃗⃗⃗⃗⃗⃗⃗ ⃗⃗⃗⃗⃗⃗⃗ 3.1 Para selecionar o cilindro inferior segundo a força máxima que ele deve atingir, os cálculos serão desenvolvidos na posição extrema exibida na Figura 3.2, a qual corresponde à posição angular . 17 Figura 3.2. Representação do caso extremo para selecionar o cilindro pneumático inferior. Para estes cálculos preliminares, W2 tem o valor de 0,5 (Kg) ou 5 (N), e Fext é de 10 (Kg) ou 100 (N). Se considerarmos a existência somente da força externa e do peso do elo, o torque no ponto F seria: |⃗⃗⃗⃗⃗⃗⃗⃗⃗ | |⃗⃗⃗⃗⃗ | |⃗⃗⃗⃗⃗⃗⃗ | 3.2 Considerando o comprimento do segundo elo, l2, igual a 380 (mm) ou 0,38 (m) e com os valores das forças mencionados anteriormente; o módulo do torque máximo é: |⃗⃗⃗⃗⃗⃗⃗⃗⃗ | 3.3 Logo, se consideramos a existência do cilindro pneumático inferior, ele deve atingir uma força capaz de executar esse torque máximo calculado para obter um deslocamento angular na junta do cotovelo. |⃗⃗⃗⃗⃗⃗⃗⃗⃗ | |⃗⃗⃗⃗⃗⃗⃗⃗⃗ | Para |⃗⃗⃗⃗⃗⃗⃗ | |⃗⃗⃗⃗⃗⃗⃗⃗⃗ | |⃗⃗⃗⃗⃗⃗⃗⃗⃗ | 3.4 |⃗⃗⃗⃗⃗⃗⃗ | 3.5 ou π (rad), o ângulo β toma o valor de 5,26° ou 0.0918 (rad). 18 |⃗⃗⃗⃗⃗⃗⃗⃗⃗ | 3.6 A força do cilindro inferior, Fp2, é encontrada ao igualar as equações 3.3 e 3.6. |⃗⃗⃗⃗⃗⃗⃗ | (N). 3.7 Com ajuda do módulo de simulação dinâmica do Solidworks, foi encontrada a evolução das forças nas juntas dos elos, como exibem a Figura 3.3 e a Figura 3.4. Sendo necessário incluir também o possível peso dos cilindros pneumáticos, a força do atrito no interior dos cilindros e um fator de segurança, as simulações foram feitas para 12 (Kg) de força externa ou 120 (N). Figura 3.3 Evolução da força do cilindro superior com relação ao deslocamento angular ϴ1. 19 Figura 3.4. Evolução da força do cilindro inferior com relação ao deslocamento angular ϴ2. Mediante o cálculo das forças máximas dos cilindros, as dimensões dos cilindros pneumáticos foram escolhidas. Os cilindros selecionados neste projeto (Figura 3.5) são da empresa Metal Work, da série chamada compacta “CMPC” devido a seu menor peso em comparação com os cilindros de outras séries. Eles são de duplo efeito e haste simples. Figura 3.5 Foto de um cilindro pneumático CMPC da empresa Metal Work. A próxima tabela apresenta as características de cada cilindro: Tabela 3.1. Parâmetros dos cilindros pneumáticos selecionados. Cilindro superior Cilindro inferior Ø (mm) Øêmbolo (mm) Pressão max. (bar) F max. @6 bar. Ida/volta (N) Peso (g) Curso (mm) 50 16 10 1178/1057 795 50 50 16 10 1178/1057 1050 100 20 A Figura 3.6 exibe a localização dos cilindros pneumáticos na estrutura final projetada. Figura 3.6. Parte lateral do exoesqueleto mostrando a localização de cada cilindro pneumático. 3.1.2 Estrutura A estrutura do exoesqueleto foi construída em alumínio. Como mostra a Figura 3.7, a estrutura da parte lateral apresenta três elos, cada um deles tem uma espessura de 10 (mm). O primeiro elo não pode movimentar-se porque funciona como uma extensão do suporte das costas. O segundo elo permite o movimento da parte superior do braço, obtendo o deslocamento angular ϴ1. Enquanto que o terceiro elo permite o movimento do antebraço ou deslocamento angular ϴ2. Embora o manipulador possua três elos, nos próximos capítulos somente dois deles, os que podem se movimentar, serão comentados. Figura 3.7 Ilustração dos movimentos angulares. 21 Como exibe a Figura 3.8, na extremidade do exoesqueleto foi projetada uma pequena garra para prender os elementos que se desejam carregar. Desta forma, nem a mão nem o pulso do usuário têm contato direto com a carga externa. Portanto, a possibilidade de uma lesão no pulso é reduzida. Figura 3.8. Vista lateral e frontal do exoesqueleto. Acerca de uma estrutura que trabalhe como suporte, uma armação baseada em tubos redondos de alumínio foi confeccionada para ficar nas costas do usuário. A Figura 3.9 mostra esta estrutura traseira de suporte. Figura 3.9. Foto da estrutura traseira de suporte. 3.1.3 Válvula pneumática A válvula escolhida para este projeto é a válvula direcional proporcional (servoválvula) MPYE-5-1/8-LF-010-B da empresa Festo. Esta válvula, apresentada na Figura 3.10, controla a vazão do ar comprimido. 22 Figura 3.10 Válvula Festo MPYE-5-1/8-LF-010-B. Esta válvula é de 5/3 vias, fechada, com acionamento elétrico de 24 V até 30 V. O sinal de entrada é de tensão entre 0 V e 10 V. A pressão de trabalho é de 6 bar e suporta até uma pressão máxima de 10 bar. Apresenta uma histerese reduzida devido ao controle de posição interno do carretel do êmbolo. A Figura 3.11 mostra os principais elementos operacionais e conexões da válvula pneumática. Figura 3.11 Elementos operacionais e conexões. 1). Conexão a terra, 2). Conexão elétrica, 3). Exaustores, 4). Portas para o fornecimento do ar comprimido, 5). Portas de trabalho, 6). Buracos para montagem, 7). Janela para inspeção do deslocamento. O diâmetro nominal do seu orifício é de 4 (mm). A vazão máxima é de 350 (l/min) ±10%. O diâmetro do orifício aumenta ou diminui proporcionalmente com relação à tensão na entrada da válvula (0 V a 10 V). Como foi dito, a válvula tem três posições e 5 vias. A Figura 3.12 é uma representação esquemática das posições e vias da válvula. 23 Figura 3.12 Representação da válvula 5/3 com acionamento elétrico. Para explicar a maneira de controlar a direção do escoamento, este esquema será usado. Para a válvula ficar na posição intermediária, onde não entra nem sai ar comprimido, a entrada de tensão deve ser de 5 (V). Para posicionar a válvula na posição direita, onde o escoamento de maior pressão vai desde a via 1 à via 2, a entrada de tensão deve ser escolhida entre 0 e 5 (V). E ainda, para colocar a válvula na posição da esquerda, onde o escoamento de maior pressão vai desde a via 1 à via 4, precisa-se de uma voltagem entre 5 e 10 (V). A voltagem de entrada além de controlar a direção do escoamento, também regula o diâmetro do orifício e consequentemente a vazão. A Figura 3.13 mostra como varia a vazão segundo a voltagem ou tensão elétrica de entrada na válvula. Figura 3.13 Curva da direção do escoamento, vazão por tensão na entrada da válvula. Como segurança em caso de ruptura do cabo de alimentação, a válvula tem acionamento automático para ficar na posição intermediária de bloqueio. 3.1.4 Sensores O exoesqueleto conta com dois tipos de sensores. Um sensor de posição em cada junta para medir o ângulo de deslocamento e dois sensores de contato por cada elo para comandar os movimentos para subir ou baixar. O sensor de posição é um potenciômetro multivoltas linear de precisão de até 10 (KΩ), apresentado na Figura 3.14. Este sensor não foi colocado diretamente na junta do 24 exoesqueleto, mas foi projetada uma pequena estrutura para acoplar o sensor perto da junta, reduzindo a excentricidade ao máximo possível, como mostra a Figura 3.15. Figura 3.14. Potenciômetro linear de precisão de até 10 (KΩ) da empresa Vishay. Figura 3.15. Foto do potenciômetro fixo na estrutura do exoesqueleto. 25 4 CAPÍTULO 4 Modelagem matemática do sistema. A obtenção de um modelo matemático exato dos sistemas pneumáticos é uma tarefa complexa devido às não linearidades do sistema causadas por várias razões, entre as principais, tem-se: a compressibilidade do ar, os efeitos do atrito entre as paredes do cilindro pneumático e as suas vedações, as relações de escoamento mássico e pressões do ar nos orifícios da válvula pneumática e a zona morta da servoválvula. Todo este comportamento não linear faz com que os controles tradicionais de força, de posição e controles lineares baseados em modelos simplificados, não sejam as melhores opções para obter bons resultados e desempenho (MENG et al., 2011, ŠITUM et al., 2003). Em geral, um modelo matemático não simplificado de um sistema servopneumático tem em consideração: uma modelagem da servoválvula ou válvula proporcional, uma modelagem termodinâmica do comportamento do ar nas câmaras do cilindro e uma modelagem da dinâmica do pistão, forças externas e forças de atrito. Neste capítulo, serão abordados os seguintes temas: cinemática (direta e inversa) do exoesqueleto, dinâmica tanto da estrutura mecânica como da parte pneumática e os possíveis pontos de singularidade. 4.1 Cinemática do exoesqueleto Com relação à cinemática, o exoesqueleto pode ser considerado como manipulador planar simples de dois elos, dois eixos, de cadeia aberta como mostra a Figura 4.1. 26 4.1.1 Cinemática direta Mediante as equações da cinemática direta do manipulador e conhecendo os ângulos ϴ1 e ϴ2, podemos saber exatamente qual é a posição cartesiana do efetuador do exoesqueleto. A representação do exoesqueleto exibida na Figura 4.1, foi usada para achar a cinemática direta. Figura 4.1. Representação planar dos elos do exoesqueleto. Existem alguns métodos para achar a cinemática direta. Neste trabalho são usados o método da transformada homogênea e o método dos twist (MURRAY et al., 1994). A matriz obtida ao aplicar estes métodos, apresenta a orientação e a posição do efetuador segundo os ângulos e . Método da transformada homogênea 4.1 [ ] 4.2 27 [ ] 4.3 [ ] 4.4 Método dos Twist (MURRAY et al., 1994) ̂ [ ] ̂ 4.5 [ ], [ ] [ ̂ ̂ ̂ [ ̂ [ ] 4.6 ] ( ̂ ) [ 4.7 ] 4.8 ] [ 4.9 ] [ 4.10 ] 4.11 Portanto, a posição do efetuador no sistema de coordenadas de referência é: No eixo x: . 28 No eixo y: . No eixo z: 0. 4.1.2 Cinemática inversa Mediante a cinemática inversa é possível achar os ângulos de cada junta a partir de configuração ou posição do efetuador. O método mais fácil para achar a cinemática inversa deste manipulador é mediante um enfoque geométrico usando a representação da Figura 4.2. Figura 4.2. Representação do manipulador para achar a cinemática inversa. √ 4.12 4.13 4.14 ( ) 4.15 4.16 29 ( ) , 4.17 4.18 ( ) √ 4.19 Substituindo as equações 4.17 e 4.19 na equação 4.16: ( ) ( √ ) 4.20 Mediante as equações 4.15 e 4.20 são encontrados os valores dos ângulos das juntas para uma posição específica do efetuador. 4.1.3 Relação entre os ângulos das juntas e o deslocamento do êmbolo de cada cilindro pneumático. Até agora as equações encontradas tanto na cinemática direta como na cinemática inversa relacionam os ângulos das juntas com a posição cartesiana do efetuador. No entanto, ainda não foi expressa uma relação entre os ângulos das juntas e o deslocamento do êmbolo dos cilindros. Isto é necessário quando se deseja movimentar o braço até atingir uma posição específica, para então saber qual é o deslocamento de cada êmbolo para chegar até essa posição. Esta relação é achada também mediante um enfoque geométrico usando uma representação simples de toda a estrutura do exoesqueleto como mostra a Figura 4.3. 30 n1=50,5 (mm) n2=105 (mm) n3=45 (mm) n4=65,22 (mm) n5=160 (mm) n6=105 (mm) n7=38,5 (mm) l1=255 (mm) l2=380 (mm) Figura 4.3. Representação dos elos do exoesqueleto e dos seus principais comprimentos. Na figura anterior, l1 e l2 representam os dois elos do manipulador, isso é o braço e o antebraço. Os pontos A e E representam os lugares de apoio de cada cilindro. Os pontos A e D são fixos, todos os outros pontos se movimentam segundo os ângulos das juntas ou deslocamentos dos cilindros. Outros parâmetros importantes na figura são r1 e r2 os quais representam o comprimento de cada cilindro pneumático de ponto a ponto; isso é, a estrutura externa dos cilindros e o deslocamento do pistão. Primeiro será encontrada uma expressão de relação entre os ângulos das juntas e r1, r2; posteriormente será encontrada uma relação entre r1, r2 e os próprios deslocamentos de cada êmbolo. Figura 4.4. Representação da parte superior. 31 ̅̅̅̅ ̅̅̅̅ ̅̅̅̅ ̅̅̅̅ 4.21 4.22 ̅̅̅̅ √ 4.23 ̅̅̅̅ √ 4.24 4.25 ( ) 4.26 4.27 ( ) 4.28 Substituindo as equações 4.26 e 4.28 na equação 4.22 é achado o ângulo α1. ( ) ( ) 4.29 Logo, r1 é calculado substituindo as equações 4.23, 4.24 e 4.29 na equação 4.21: ⁄ ( √ ( ( ) ( ) )) 4.30 32 Figura 4.5. Representação da parte inferior. ̅̅̅̅ ̅̅̅̅ ̅̅̅̅ ̅̅̅̅ 4.31 ̅̅̅̅ √ 4.32 ̅̅̅̅ √ 4.33 4.34 ( ) 4.35 ( ) 4.36 Substituindo as equações 4.32, 4.33, 4.34, 4.35 e 4.36 na equação 4.31, o valor do r2 é calculado. ⁄ ( √ ( ( ) ( ))) 4.37 33 Com estas relações de r1 e r2 com os ângulos das juntas e , são calculados os deslocamentos correspondentes a cada êmbolo. 1 2 Vp1A Vp1B B A Figura 4.6. Representação dos comprimentos do cilindro superior. Se o deslocamento do êmbolo superior for zero, isso é, se o êmbolo superior estiver na posição inicial como mostra a Figura 4.6-A, o parâmetro r1 pode ser expresso da seguinte maneira: 4.38 Onde n9, lp1 e w1, são valores constantes do cilindro superior. No entanto, devido ao deslocamento do êmbolo, o parâmetro r1 muda dependendo desse deslocamento, chamado xp1 no caso do êmbolo superior. Segundo a Figura 4.6-B é achada a relação entre r1 e o deslocamento: Ou 4.39 Os volumes nas câmaras são calculados pelas seguintes equações: 4.40 Onde é o volume da câmara 1 do pistão superior e é o volume da câmara 2 do mesmo pistão superior. Como mostra a Figura 4.6-B. A1 é a área transversal da câmara 1. A2 é a área transversal da câmara 2. Os dois cilindros apresentam as mesmas áreas, A1 e A2, pois a diferença entre eles está só no curso. 34 4.41 ( Onde é o diâmetro do cilindro e ) 4.42 é o diâmetro do êmbolo. Seus valores foram apresentados na Tabela 3.1. Da mesma forma, é construída a relação de r2 com o deslocamento xp2 do cilindro pneumático inferior. A Figura 4.7-C mostra o êmbolo do cilindro inferior na posição inicial, onde xp 2 é zero. A Figura 4.7-D apresenta o cilindro inferior com o êmbolo deslocado um valor xp2. 1 2 Vp2A Vp2B C D Figura 4.7. Representação dos comprimentos do cilindro inferior. A relação entre o parâmetro r2 e o deslocamento xp2 é encontrada pela seguinte equação: Ou 4.43 Os volumes das câmaras do cilindro inferior são: 4.44 Onde é o volume da câmara 1 do pistão inferior e é o volume da câmara 2 do mesmo pistão. Como exibe a Figura 4.7-D. Com as equações anteriores é possível saber, por exemplo, para uma posição cartesiana específica, quais são os valores dos ângulos das juntas e quais são os deslocamentos correspondentes de cada êmbolo. 35 Segundo FRENCH et al. (1988) existem três considerações principais para projetar um modelo matemático de um sistema pneumático. Estas são: determinação da dinâmica dos escoamentos mássicos através da válvula ou válvulas pneumáticas; caracterização das pressões, temperaturas e volume do ar dentro do cilindro pneumático; e a determinação da dinâmica da carga aplicada no cilindro pneumático. 4.2 Dinâmica da estrutura mecânica Mediante o estudo da dinâmica de um sistema mecânico, é encontrada uma relação entre forças ou torques aplicados nas juntas e o movimento do manipulador, ou seja, deslocamentos, velocidades e acelerações. Existem alguns métodos para determinar as equações que descrevem o comportamento dinâmico dos sistemas, mas o método usado neste projeto é o método de balanço de energias potencial e cinética, chamado método de Lagrange. Para achar a relação mencionada, primerio é necessário definir o Lagrangiano, L, como na equação 4.45, (MURRAY et al., 1994). ̇ ̇ 4.45 Onde T é a energia cinética do sistema, e V é a energia potencial. Estas duas energias são expressas em coordenadas generalizadas, q. No caso do presente projeto, estas coordenadas generalizadas são ϴ1 e ϴ2 (Não as típicas coordenadas x, y, z). Depois, a equação de Lagrange é: 4.46 ̇ Onde representa o torque aplicado na junta i generalizada. Substituindo as coordenadas generalizadas próprias do manipulador, as equações de Lagrange têm a forma: ̇ ]=[ ] [ 4.47 ̇ 36 Onde é o torque gerado na junta do ombro e é o torque na junta do cotovelo. Estes dois torques são causados pela dinâmica do sistema mecânico, isso é, sem considerar as força dos pistões devido às pressões internas. O esquema gráfico usado para o cálculo da dinâmica é mostrado na Figura 4.8: Figura 4.8. Representação gráfica do sistema mecânico para determinar sua dinâmica. A energia cinética é expressa como: ̇ ̇ 4.48 Onde: ̇ ̇ [ ] e ̇ é a sua transposta. ̇ 4.49 4.50 [ ]; [ ] 4.51 [ ]; [ ] 4.52 37 [ ]; [ ] 4.53 Para achar a matriz de massa do sistema, , é necessário calcular os jacobianos do corpo de cada elo. [ ] 4.54 Substituindo as equações 4.51 e 4.53 na equação 4.54 é achado o jacobiano do corpo do elo superior. 4.55 [ ] [ ] 4.56 Como a junta do cotovelo gira no mesmo sentido e direção que a junta do ombro, . [ ] 4.57 Substituindo as equações 4.52 e 4.53 na equação 4.57, temos: [ ] 4.58 Substituindo as equações 4.51, 4.53 e 4.58 na equação 4.56, o jacobiano do corpo do segundo elo é: 38 4.59 [ ] Além disso, temos as matrizes de massa de cada elo como: ; [ 4.60 ] [ ] Depois de substituir as equações 4.55, 4.59 e 4.60 na equação 4.50 e fazer as operações indicadas, a matriz da massa do sistema passa a ser: [ ] 4.6 1 Portanto, a energia cinética da equação 4.48 é: ̇ ̇ ̇ ̇ ̇ ̇ ̇ ̇ ̇ ̇ ̇ ̇ ̇ ̇ 4.62 ̇ Para o cálculo da energia potencial, a cinemática direta pelo método dos twist é usada: ̂ ̂ ̂ 4.63 4.64 39 ̂ [ ] [ ] 4.66 [ ] ⃗⃗⃗⃗⃗⃗ [ ̂ ̂ 4.65 4.67 ] 4.68 ̂ 4.69 [ ] [ 4.70 ] 4.71 [ ] ⃗⃗⃗⃗⃗⃗ [ ] 4.72 4.73 40 ( ⃗⃗⃗⃗⃗⃗ ) ⃗⃗⃗⃗⃗⃗ ) ( 4.74 Considerando as coordenadas de referência x0 e y0, o vetor da gravidade é: [ ] 4.75 Substituindo as equações 4.68, 4.73 e 4.75 na equação 4.74 e realizando as operações indicadas, a energia potencial se torna: 4.76 Tendo as expressões das energias potencial e cinética, é possível determinar o lagrangeano L ao substituir as equações 4.62 e 4.76 na equação 4.45. Em seguida, L é derivado com respeito a ϴ1 e ϴ2: L também é derivado com respeito a ̇ e ̇ . Então, estas últimas derivadas são novamente derivadas, mas com respeito ao tempo: ( ̇ ) ( ̇ ). Com todas estas derivadas, os torques em cada junta são calculados: ( ( ̇ ̇ ) 4.77 ) 4.78 Estes torques podem ser expressos mediante matrizes ao rearmar as expressões anteriores: [ ] ̈ [ ] ̈ ( ̇ ̇) [ ] ̇ 4.79 Onde: [ ] 4.80 41 ̇ [ ̇ ] ̇ [ 4.81 ] 4.82 Devido à existência de uma força ou carga externa no efetuador do exoesqueleto, é necessário adicionar na equação 4.79, um termo do torque gerado por essa força. [ Onde ] 4.83 é a parte do torque gerado pela carga externa. Desta forma, a dinâmica da parte mecânica do exoesqueleto é expressa na seguinte equação: [ ] ̈ [ ] ̈ ( ̇ ̇) [ ] ̇ 4.84 A relação entre a parte mecânica com a parte pneumática deve garantir que as forças dos cilindros pneumáticos, estudadas na seção 4.3, produzam os torques da equação 4.84 para obter os movimentos desejados. 4.2.1 Pontos de singularidade. Ponto de singularidade é uma configuração (posição, orientação) do manipulador onde não é possível controlar a mobilidade. Normalmente, quando muito perto dos pontos de singularidade, uma pequena velocidade de entrada (no espaço de trabalho) pode resultar numa alta velocidade no espaço das juntas (SICILIANO et al., 2009). Os pontos de singularidade são facilmente achados ao analisar o jacobiano. O esquema da Figura 4.9 é usada para determinar os pontos de singularidade. Estes pontos aparecem quando a matriz do jacobiano perde ou diminui seu posto. Ou seja, quando existe a seguinte condição: | | 4.85 42 Figura 4.9. Esquema do manipulador para determinar o jacobiano espacial. [ ] [ ] [ [ ]; ] [ ] 4.86 4.87 O jacobiano espacial pode ser calculado mediante a seguinte equação: [ ] 4.88 Substituindo as equações 4.86 e 4.87 na equação 4.88 e fazendo as operações indicadas, obtemos o jacobiano espacial: 4.89 [ ] Como o manipulador trabalha no plano xy, o jacobiano pode ser considerado: [ ] 4.90 43 O determinante da matriz da equação anterior é: | | ( ) ( ) 4.91 | | Se a condição da equação 4.85 existe, então existem pontos de singularidade. Avaliando a última equação, encontra-se que estes pontos aparecem para: ; ; O exoesqueleto foi projetado e fabricado de tal maneira que o ângulo 4.92 tenha um valor mínimo de 23ᴼ e um valor máximo de 87ᴼ. Com isto, a condição da equação 4.92 não é atingida e portanto, o exoesqueleto não apresenta perigo de pontos de singularidade. 4.3 Dinâmica das forças dos cilindros pneumáticos. De acordo com SHU, et al. (2005), duas são as referências consideradas como a base na modelagem de sistemas servo pneumáticos: SHEARER (1956) e McCLOY et al. (1980). Nestas referências, a modelagem matemática do sistema pneumático foi desenvolvida em base às cinco seguintes leis: a primeira lei da termodinâmica, a equação da continuidade dos escoamentos, a equação ou lei dos gases ideais, o comportamento do escoamento mássico a través de um orifício e finalmente a segunda lei de Newton ou princípio fundamental da dinâmica. Segundo MOVELLAN (2009), basicamente existem quatro tipos de forças relacionadas aos cilindros pneumáticos, estas são: Força devida às pressões internas das câmaras, Fp. 4.93 44 Onde: respetivamente. e são a pressão e a área efetiva do pistão na câmara 1, e são a pressão e a área efetiva do pistão na câmara 2, respetivamente. Para achar estas pressões é necessário fazer uma análise termodinâmica do sistema como é feita na secção: 4.3.1 Modelagem das pressões internas nas câmaras dos cilindros. Força de atrito dinâmica e forças viscosas, Fadv. ̇ Onde ̇ 4.94 é a força resultante das forças viscosas e do atrito dinâmico entre o selo do êmbolo com as paredes do cilindro pneumático. (N) é o coeficiente do atrito dinâmico, enquanto que (N/(m/s)) é o coeficiente de viscosidade. Forças externas, Fext. Qualquer objeto, ou peso conectado ao pistão do cilindro pneumático é considerado como força externa. Força de atrito estática. se | | 4.95 0, se | A força do atrito estática, coeficiente de atrito estático, | , pode existir ou não. Ele existe quando o , é maior que a soma de todas as outras forças e, neste caso, não permite o deslocamento do êmbolo. Por outro lado, se o coeficiente estático é menor que a soma das outras forças, não existe atrito estático, por tanto, é possível o deslocamento do êmbolo. 4.3.1 Modelagem das pressões internas nas câmaras dos cilindros. 45 Para simplificar o modelo termodinâmico, é possível fazer algumas considerações como: desprezo da energia cinética e da energia potencial dos cilindros, assumir que o ar se comporta como um gás ideal e considerar que as pressões e as temperaturas internas das câmaras do cilindro são homogêneas. Assim, o modelo matemático pode ser baseado na lei dos gases ideais, na lei da conservação da massa e na primeira lei da termodinâmica em cada câmara do cilindro como é feito em KAZEROONI (2004). Para o presente trabalho, esta referência é a base da modelagem termodinâmica. Em muitos casos, um modelo matemático simplificado ou reduzido é suficiente para obter bons resultados. Com esta premissa, alguns trabalhos anteriores sobre o controle de sistemas pneumáticos apresentam algumas simplificações na dinâmica da temperatura do ar, como, por exemplo, considerar que os processos de entrada e saída do ar das câmaras dos cilindros são isotérmicos, adiabáticos e politrópicos. No entanto, estas simplificações têm sido testadas e demostradas como não apropriadas para obter um controle de posição com uma boa precisão. Para determinar a modelagem termodinâmica, o sistema foi representado na Figura 4.10. Figura 4.10. Representação do volume de controle do sistema pneumático (cilindro – válvula). 46 Pela primeira lei da termodinâmica: ̇ ̇ ( ) ̇ ( ) ̇ 4.96 Onde: ̇ é o fluxo mássico na entrada do volume de controle. ̇ é o fluxo mássico na saída do volume de controle. é a entalpia do ar comprimido na saída da válvula e antes de entrar na câmara 1. é a entalpia do ar comprimido na saída da câmara 2 e antes de entrar na válvula. é a velocidade do ar comprimido na saída da válvula e ante de entrar na câmara 1. é a velocidade do ar na saída da câmara 2 e antes de entrar na válvula. ̇ é a transferência de calor no volume de controle. ̇ é o trabalho desenvolvido ou recebido pelo volume de controle. é taxa de variação da energia total no volume de controle. Para um melhor entendimento da primeira lei da termodinâmica, sua análise pode-se decompor em várias partes: variação da energia total entalpias ( , do trabalho ̇ , das ) e da transferência de calor ̇ . Análise da variação da energia total. A variação da energia total no volume de controle é decomposta em: variação da energia cinética, variação da energia potencial e variação da energia interna. Comparando todas estas variações é possível assumir que as variações das energias cinética e potencial são muito menores à variação da energia interna, por isso são omitidas para a análise. Portanto, a variação da energia total em função da energia interna da câmara 1 ( ) e da câmara 2 ( ) fica: 4.97 Assumindo que o ar é um gás ideal, as energias internas são: 47 4.98 ou 4.99 é o calor específico do ar a volume constante. R é a constante universal dos gases perfeitos. , são as densidades do ar nas câmaras 1 e 2 respetivamente. são os volumes ocupados pelo ar nas câmaras 1 e 2 respetivamente. são as temperaturas do ar nas câmaras 1 e 2 respetivamente. são as pressões do ar nas câmaras 1 e 2 respetivamente. ( ) ( ) ( ̇ ̇) 4.100 ( ) ( ) ( ̇ ̇) 4.101 Substituindo as equações 4.100 e 4.101 na equação 4.97, a variação da energia total do sistema é: ( ) ( ̇ ̇) ( ) ( ̇ ̇) 4.102 Variação do trabalho. A taxa do trabalha do volume de controle pode ser expressa como: ̇ ̇ e ̇ ̇ ̇ 4.103 são as taxas de variação dos volumes das câmaras 1 e 2 do cilindro pneumático. Entalpias de entrada e saída. Entalpia na entrada do cilindro, como mostra a Figura 4.11. 48 Figura 4.11. Entrada do cilindro - câmara 1. Pela conservação da energia, a entalpia na entrada pode ser descrita pela seguinte equação: 4.104 O ar, depois de passar pelo compressor, é armazenado no acumulador até que o sistema precise de ele. É possível assumir que quando o ar sai do acumulador, sua velocidade é 0. 4.105 Onde é a entalpia do ar no acumulador e pode ser expressa em função do calor específico a pressão constante: 4.106 é o calor específico do ar a pressão constante. é a temperatura do ar na saída do acumulador. Reescrevendo a equação 4.105: 4.107 Entalpia na saída do cilindro, como mostra a Figura 4.12. 49 Figura 4.12. Saída do cilindro – câmara 2. Pela conservação da energia, a entalpia na entrada pode ser descrita pela seguinte equação: 4.108 Comparando a velocidade do ar na câmara 2 com a velocidade do ar na saída, a velocidade na câmara 2 é muito inferior. Portanto, é possível reduzir a expressão da equação 4.108 a: 4.109 Onde é a entalpia do ar comprimido na saída da câmara 2. A entalpia pode ser expressa em função do calor específico a pressão constante: 4.110 Portanto, a equação 4.109 em função da temperatura na câmara 2 é: 4.111 Revalidando a equação 4.96. Substituindo as equações 4.102, 4.103, 4.107, 4.111 na equação 4.96, a equação da primeira lei da termodinâmica fica sendo: ̇ ̇ ̇ ( ) ( ̇ ̇) ( ) ( ̇ ̇) ̇ ̇ 4.112 50 Assumindo que a troca de energia entre o volume de controle e o ambiente é muito pequena ( ̇ ̇ ) e manipulando a equação anterior: ̇ ) ( ̇ ( ̇ ̇ ) ( ( ̇ ̇ ̇ ̇ ( ̇ ) ( ̇ ̇ ̇) 4.113 ) 4.114 ̇) Onde a constante dos gases ideais R é: ̇ ( ̇ ̇ ( ̇ ̇ ̇ ( ) 4.115 ̇) Dividindo a equação anterior para ̇ ̇ : ) ( ̇ ̇ ) ̇ ( Usando a razão entre calores específicos do ar ( ̇ ̇) 4.116 ), a equação anterior fica sendo: ̇ ̇ ( ) ( ̇ ̇ ) ( ̇ ̇) 4.117 Finalmente os volumes das câmaras e suas variações, mostrados na Figura 4.13, são função da distância percorrida pelo pistão. Figura 4.13. Representação da distância que percorre o pistão. Câmara 1: ̇ ̇ 4.118 51 Câmara 2: ̇ 4.119 ̇ Onde C é o curso do cilindro. Substituindo as equações 4.118 e 4.119 na equação 4.117, a equação da primeira lei da termodinâmica aplicada no sistema passa a ser: ̇ ̇ ( )( ̇ ̇ ( ) ̇ ) ̇ 4.120 Esta equação mostra como varia a posição e velocidade do pistão em função do escoamento mássico. O escoamento mássico é função da abertura da válvula proporcional. Mediante a modelagem da dinâmica da válvula, as equações do fluxo mássico do ar na entrada e saída do cilindro serão encontradas. Das equações anteriores, é possível determinar como variam as pressões em cada câmara dos cilindros. As equações 4.121 e 4.122 indicam como variam essas pressões na câmara 1 e 2. ̇ ̇ ̇ ̇ 4.121 ̇ ̇ 4.122 4.3.2 Modelagem da válvula (vazões mássicas). Uma válvula proporcional apresenta um controle interno que exerce o deslocamento do carretel do êmbolo dependendo do sinal de entrada. O modelo de uma válvula proporcional pode ser dividido em duas partes: uma parte mecânica e uma parte pneumática. A parte mecânica é a responsável pelo deslocamento do carretel do êmbolo, enquanto a parte pneumática descreve o comportamento do escoamento de ar através do orifício da válvula em função do sinal de entrada ou do deslocamento do carretel (MENG et al., 2011). 52 Análise Cinemática – parte mecânica. MENG et al. (2011) encontraram experimentalmente que o deslocamento do carretel da válvula MPYE-5-1/8-HF-010B, que é da mesma série da válvula usada no presente trabalho, varia quase linearmente com o sinal de entrada (Figura 4.14-A). Entretanto, o comportamento na frequência é não linear porque seu ganho e sua amplitude dependem da amplitude deste sinal (Figura 4.14-B). A largura de banda da válvula proporcional é de 100 Hz, mas tipicamente a largura de banda de um sistema pneumático não é maior a 10 Hz, então, segundo o experimento e à última consideração, é sugerido não levar em conta a modelagem da parte mecânica da válvula proporcional. Figura 4.14. A) Deslocamento do carretel da válvula proporcional vs sinal de entrada. B) Resposta em frequência da válvula proporcional. (MENG et al., 2011). Análise termodinâmica Para simplificar o modelo matemático, é assumido que o escoamento de ar através da válvula proporcional é um processo adiabático, mesmo que na prática as válvulas proporcionais aquecem e transferem calor ao ambiente. A modelagem do escoamento através da válvula proporcional será feita mediante um modelo simples de vazão através de um orifício de área variável como em KAZEROONI (2004). Ao final desta modelagem, as funções achadas dos escoamentos mássicos em cada câmara serão dependentes das pressões do reservatório ou acumulador, da pressão 53 atmosférica, das pressões internas de cada câmara e também do sinal de controle expressa pela área variável da servoválvula. Para conhecer os diferentes tipos de padrões de vazão do ar obtidos pelo efeito do estrangulamento da válvula, é preciso estudar as relações entre as pressões relacionadas no estrangulamento, isto é, entre a pressão do ar na saída do acumulador do compressor ( ) e na entrada do cilindro pneumático ( , por exemplo: ( ). A Tabela 4.1 é um resumo dos tipos de vazão segundo a relação de pressões. Tabela 4.1. Tipos de vazão do ar através da válvula proporcional segundo a razão de pressões. Caso 1 Sem vazão Como a pressão no cilindro é igual à pressão no acumulador, não há uma força resultante para produzir um deslocamento do pistão. Isto acontece, por exemplo, quando a força externa é muito grande. Caso 2 Vazão subcrítica A pressão na saída da válvula e na entrada do cilindro é uniforme e pelo tanto . Caso 3 Vazão crítica À medida que a diferença entre a pressão do ar no acumulador e na entrada do cilindro aumenta a vazão também aumenta até um regime crítico, onde sua velocidade atinge a velocidade do som. Caso 4 Vazão supercrítica Uma vez que a vazão do ar atinge a velocidade do som, ela não aumenta mesmo que a diferença de pressões aumente. A pressão no estrangulamento fica constante: . Na prática, este caso acontece quando a carga externa é muito pequena. A Figura 4.15 apresenta os principais efeitos na vazão de ar no estrangulamento da válvula proporcional. 54 Figura 4.15. Efeitos na vazão do ar pelo estrangulamento da válvula proporcional (KAZEROONI, 2004). Cálculo do escoamento mássico em cada câmara do cilindro. Uma vez que o ar atinge o escoamento crítico, sua velocidade permanece constante mesmo que a pressão no cilindro diminua, mas seu escoamento mássico ainda depende da variação da pressão no cilindro. Os escoamentos mássicos ̇ e ̇ , dependendo da razão de pressões (escoamento subcrítico ou crítico), apresentam diferentes comportamentos. Escoamento mássico na entrada do cilindro – câmara 1. O escoamento mássico do ar através da válvula proporcional (até a entrada do cilindro) é calculado pela seguinte equação: ̇ 4.123 é a área do orifício da válvula proporcional, a qual no desenho do algoritmo de controle será expressa em função de voltagem (sinal de entrada). é a densidade do ar no estrangulamento da válvula proporcional. é a velocidade do ar no estrangulamento da válvula proporcional. Pode ser calculada mediante o número de Mach ( - razão entre a velocidade do objeto e a velocidade do som): √ 4.124 As pressões nas câmaras do cilindro podem ser medidas diretamente, mas a pressão no estrangulamento da válvula proporcional não. Portanto para calcular a 55 pressão ( ), temperatura ( ) e densidade ( ) do ar no estrangulamento da válvula, é usado o número de Mach nas seguintes equações: ( ) 4.125 ( ) 4.126 ( ) 4.127 Substituindo as equações anteriores (de 4.124 até 4.127) na equação 4.123: ̇ ( ) √ 4.128 Ou: ̇ ( ) √ A equação 4.128 mostra que a taxa do escoamento mássico na entrada da câmara 1 depende da abertura da válvula, da pressão e temperatura no acumulador e do número de Mach, entre outros termos. O cálculo do número de Mach pode ser feito a partir das razões das pressões, temperaturas ou densidades mediante as equações 4.125, 4.126 e 4.127. A maneira mais prática é calculá-lo mediante a razão de pressões: [( ) ] √ 4.129 Substituindo a equação do número Mach na equação 4.128, o fluxo mássico na câmara 1 fica: ̇ √ ( ) [( ) ] √ 4.130 56 De uma maneira mais simplificada, o fluxo mássico na câmara 1 será: √ ̇ 4.131 √ Onde: ( ) [( ) ] Quanto à pressão no estrangulamento da válvula ( ), há duas possibilidades que dependem do tipo de escoamento de ar (subcrítico ou crítico): Possibilidade A: escoamento subcrítico ( ) Como foi mostrado na Tabela 4.1, quando existe um escoamento subcrítico, a pressão no estrangulamento da válvula é igual à pressão do ar na entrada do cilindro (câmara 1): . Substituindo esta condição na equação 4.131, o escoamento mássico na entrada da câmara 1 é: √ ̇ 4.132 √ Onde: ( ) [( ) Possibilidade B: escoamento crítico ( ] ) Quando o escoamento é crítico, a pressão no estrangulamento da válvula fica constante: . Substituindo esta condição na equação 4.131, o escoamento mássico é: √ ̇ 4.133 Onde: √ [ ] Escoamento mássico na saída do cilindro – câmara 2. Para encontrar uma expressão do comportamento do escoamento mássico na saída do cilindro, deve-se realizar uma análise similar à realizada na entrada do cilindro; 57 mas neste caso, relacionando a pressão (em vez de ) e (em vez de ). Portanto, o escoamento mássico na saída do cilindro ( ̇ ) pode ser: Possibilidade A: escoamento subcrítico ( ) O escoamento mássico na saída da câmara 2 é: √ ̇ 4.134 √ Onde: ( ) [( Possibilidade B: escoamento crítico ( ) ] ) Quando o escoamento é crítico, a pressão no estrangulamento da válvula fica constante: . O fluxo mássico na saída da câmara 2 é: √ ̇ 4.135 Onde: √ [ ] Desta forma, os escoamentos mássicos na entrada e na saída do cilindro podem ser calculados em função das pressões na entrada e saída ( , ) e da abertura da válvula proporcional. Esta abertura será considerada como a variável a ser controlada pelo algoritmo de controle. O estudo destes escoamentos é importante porque deles depende primeiro a dinâmica das pressões internas das câmaras do cilindro como foi expresso nas equações 4.121 e 4.122, mas também a força resultante do cilindro a qual é função das pressões internas como foi expressa na equação 4.93: 4.93 4.3.3 Forças de atrito No sistema pneumático há alguns parâmetros que devem ser identificados experimentalmente como: o coeficiente de descarga da válvula, as forças de atrito dinâmico e estático do cilindro, e o coeficiente de atrito viscoso. 58 Estimação dos parâmetros das forças de atrito. SHU et al. (2005) e LEE et al. (1993) apresentam um método experimental (similar) para estimar os parâmetros das forças do atrito e o coeficiente das forças viscosas. São necessários pelo menos sensores de pressão e de posição. Este método se baseia na primeira lei de Newton (considerando que não existe uma força ou carga externa): ̇ ̇ | | ̈= Onde é a força do pistão, força de atrito dinâmica de Coulomb, | | ̇ ̇ ̇ 4.136 ̇ é a força de atrito estática de Coulomb, éa é o coeficiente de atrito viscoso, M é a massa do cilindro e pistão, ̇ e ̈ são as velocidades e acelerações do pistão respectivamente. A força de atrito de Coulomb pode ser ̇ ̇ ̇ 4.137 Onde ̇ ̇ ̇ 4.138 ̇ A maneira mais prática de expressar todas as possibilidades do atrito de Coulomb é expressa na equação 4.136, a qual é a base para os cálculos dos parâmetros depois de realizado o experimento. Como estes parâmetros dependem de cada cilindro (materiais, comprimentos, etc.) o melhor método é a avaliação experimental mediante sinais de entrada tipo impulso. Com o pistão na posição inicial 0, é aplicado um sinal impulso u1 (conhecido para provocar um movimento suave, isso é, não muito rápido, não muito lento). Exatamente no momento quando o pistão começa o movimento ou deslocamento, as 59 pressões da câmara de entrada e saída do ar são recolhidas (P1a, P1b). Quando o pistão apresenta uma velocidade constante, novamente as pressões tanto na câmara de entrada como de saída do cilindro são recolhidas novamente (P2a, P2b), mas também essa velocidade constante ̇ . Este procedimento é feito uma vez mais, mas com outro sinal impulso, u2. As pressões são recolhidas novamente no instante do começo do movimento (P3a, P3b) e quando o pistão apresenta uma velocidade constante (P4a, P4b). Também a velocidade constante ̇ . No momento preciso quando o pistão começa a se movimentar, a força do pistão (achada pela multiplicação da área do cilindro pela diferença entre pressões experimentalmente recolhidas no primeiro ponto de movimento) é pouco maior que a força de atrito estática. Para achar esta força de atrito estática, ela é considerada em equilíbrio com a força do pistão. 4.139 [ ] Quando a velocidade atinge um valor quase constante, as pressões também têm valores constantes, portanto quando a aceleração é 0, temos um sistema de equações como o seguinte: ̇ ̇ 4.140 ̇ A solução deste sistema de equações é: ̇ ̇ [ ⁄ ] 4.141 ̇ [ ] 60 5 CAPÍTULO 5 Sistema de Controle A implementação foi feita para o elo inferior, o antebraço, uma vez que a discussão da metodologia utilizada é a mesma para o outro elo. Para cumprir o objetivo do exoesqueleto de assistir ao usuário para realizar a tarefa desejada, um aspecto essencial é o sinal de controle. A informação proporcionada pelo algoritmo de controle deve ser suficientemente precisa para que numa intenção de movimento (voluntário) do usuário, o exoesqueleto seja capaz de acompanhar esse movimento fornecendo uma resposta o mais rápida, suave e natural possível. Além disso, o algoritmo precisa assegurar que as forças de interação entre o braço humano e o exoesqueleto sejam mínimas, atingindo nesta forma um preciso seguimento do movimento dirigido pelo usuário. Em geral, o modelo dinâmico do sistema influencia na escolha do tipo de controle. Se o modelo do sistema é relativamente bom ou com uma boa aproximação do comportamento, um controle simples obterá uma boa resposta. Se o modelo do sistema é muito complexo e precisa de simplificações, o controle mais adequado é algum algoritmo de controle robusto, onde as incertezas não consideradas na modelagem dinâmica não consigam alterar os resultados. No passado, os sistemas pneumáticos eram usados basicamente em aplicações onde se precisava somente das posições iniciais e finais dos atuadores. No entanto, com o desenvolvimento das válvulas proporcionais e a criação de novos tipos de controles, as aplicações destes sistemas têm aumentado muito nas áreas de servo-controle, não só nos robôs manipuladores, mas também nos sistemas de freio de caminhões, controle de 61 embreagem de caminhões, suspensão de ar, máquinas para reabilitação, controle de força de garras industriais, máquinas empacotadoras, entre outras (XIANG, 2001). A problemática para controlar os sistemas pneumáticos devido às não linearidades faladas anteriormente, é expressa na dificuldade para obter com precisão escoamentos mássicos, pressões, forças, velocidades, etc. (XIANG, 2001). Com o tempo, muitos têm sido os controles estudados e propostos para estes tipos de sistemas com o objetivo de obter boas respostas, não somente em um ponto de operação. Entre os primeiros controles aplicados aos sistemas servo pneumáticos, está o clássico controle linear de ganho fixo (proporcional, integral, derivativo), PID; o qual se baseia na linearização da dinâmica do modelo ao redor de um ponto desejado (set point) para obter uma função linear de transferência do sistema. Alguns trabalhos onde este tipo de controle é aplicado em sistemas pneumáticos são: SHEARER (1956), BURROWS et al. (1966), VAUGHAN (1965). Esse tipo de controle possui uma limitação, porque é válido somente quando existem pequenas variações ao redor do ponto de operação (MENG et al., 2011). Devido à pequena faixa de operação do clássico controle PID, foi desenvolvido um controle onde foram escolhidos alguns pontos de operação. Para cada um desses pontos, uma aproximação linear invariante no tempo foi projetada da dinâmica do modelo de planta e também um controle linear. Então, de acordo com o ponto de operação, o ganho do controle é auto ajustado. Desse modo, é possível obter um maior alcance de operação (PU et al., 1993, FOK et al., 1999). Para auto ajustar os parâmetros do controle, até redes neurais têm sido usadas como em FUJIWARA et al. (1995) e MATSUKUMA et al. (1997). Outro tipo de controle usado é o controle convencional adaptativo, o qual assim como o controle PID de auto ajuste dos parâmetros, também procura ajustar os mesmos, mas de maneira on-line, não off-line como no clássico PID. Alguns trabalhos que apresentam este tipo de controle são WIKANDER (1988), TANAKA et al. (1994), LI et al. (1997). Em trabalhos posteriores, redes neurais têm sido usadas junto com o controle adaptativo com o objetivo de efetuar a compensação de algumas não linearidades do sistema (TANAKA et al., 1999). A aplicação do controle de modos deslizantes nos últimos anos mostra que este tipo de controle pode apresentar uma boa precisão na resposta, estabilidade e é bastante 62 robusto. Além disso, tem a vantagem de não precisar de uma boa aproximação do modelo de planta (XIANG, 2001). Mediante as figuras que mostram as evoluções das forças que os pistões apresentam segundo a posição angular (Figura 3.3 e Figura 3.4), é claro que cada cilindro pneumático não precisa exercer forças altas todo o tempo. A força do pistão poderia ser controlada ou regulada dependendo da carga externa e da posição angular. Isso é feito ao regular as pressões internas das câmaras dos cilindros. Porém, a servoválvula ou válvula proporcional adquirida não regula pressão senão vazão do ar comprimido. Portanto, não foi empregado um controle de força. Os cilindros foram escolhidos segundo o caso de maior carga, por conseguinte, eles podem levantar sem dificuldade qualquer peso externo até 10 kg. Para saber como é o comportamento da válvula proporcional e do sistema em geral, alguns testes foram feitos para diferentes entradas de voltagem. (Sem colocar nenhuma carga externa). Os resultados obtidos foram comparados com o movimento cotidiano e normal do braço humano, para assim, determinar se os movimentos obtidos no exoesqueleto podem ou não ser usados no braço humano. As especificações da válvula dizem que é preciso uma tensão de 5 V para manter a posição atual. Entretanto, devido ao peso da estrutura, foi achado um novo valor de 5.35 V para manter a posição do braço fixa quando nenhuma carga externa é colocada. Tipo de movimento: Baixar. Segundo a conexão das portas da válvula com as câmaras do pistão inferior e segundo as especificações técnicas da válvula, uma voltagem abaixo dos 5.35 V, produz um deslocamento angular negativo e uma velocidade angular negativa, isso quer dizer que com uma voltagem menor que 5.35 V, é obtido o movimento para baixar o antebraço. As figuras seguintes são os resultados do deslocamento angular e da velocidade angular para diferentes voltagens na válvula, obtidos pelo sinal do potenciómetro e da sua derivada respectivamente. 63 Velocidade angular 100 80 60 40 20 0 0 10 20 30 Tempo (s) Velocidade angular ( ᵒ/s) Posição angular ( ᵒ) Posição angular 2 0 0 10 20 30 -2 -4 -6 Tempo (s) Figura 5.1. Baixar. Voltagem:5.3V Como mostra a Figura 5.1, com uma tensão de 5.3 V, o elo inferior baixa, mas seu movimento não é contínuo e sua velocidade é muito baixa. Velocidade angular 100 80 60 40 20 0 0 10 20 30 Tempo (s) Velocidade angular ( ᵒ/s) Posição angular ( ᵒ) Posição angular 2 0 -2 0 10 20 30 -4 -6 -8 Tempo (s) Figura 5.2. Baixar. Voltagem:5.2V Na Figura 5.2, com uma tensão de 5.2 V, o elo inferior desce com um movimento não contínuo e velocidade muito baixa. Velocidade angular 100 80 60 40 20 0 0 5 10 Tempo (s) 15 Velocidade angular (ᵒ/s) Posição angular ( ᵒ) Posição angular 2 0 -2 0 5 10 15 20 -4 -6 Tempo (s) Figura 5.3. Baixar. Voltagem:5.1V 64 A Figura 5.3 mostra que com uma tensão de 5.1 V na válvula, o elo inferior Posição angular ( ᵒ) Posição angular 100 80 60 40 20 0 0 5 10 15 20 Tempo (s) Velocidade angular ( ᵒ/s) continua descendo com um movimento não contínuo e uma velocidade muito baixa. Velocidade angular 2 0 -2 0 5 10 15 20 -4 -6 Tempo (s) Figura 5.4. Baixar. Voltagem:5V Como mostra a Figura 5.4, com uma tensão de 5 V, o movimento não é contínuo Posição angular 100 80 60 40 20 0 0 5 10 15 Tempo (s) Velocidade angular ( ᵒ/s) Posição angular ( ᵒ) e sua velocidade é muito baixa. Velocidade angular 2 0 -2 0 5 10 15 -4 -6 Tempo (s) Figura 5.5. Baixar. Voltagem:4.9V Na Figura 5.5, com uma tensão de 4.9 V, ainda que a velocidade angular do elo Posição angular 100 80 60 40 20 0 0 2 4 6 Tempo (s) 8 10 Velocidade angular ( ᵒ/s) Posição angular ( ᵒ) inferior é muito baixa, o movimento é contínuo. Velocidade angular 5 0 0 2 4 6 8 10 -5 -10 Tempo (s) Figura 5.6. Baixar. Voltagem:4.8V Na Figura 5.6, com uma tensão de 4.8 V, o movimento do elo inferior é contínuo e apresenta uma velocidade baixa, mas maior que no caso anterior. 65 Velocidade angular 100 80 60 40 20 0 0 1 2 3 4 5 Tempo (s) Velodidade angular ( ᵒ/s) Posição angular ( ᵒ) Posição angular 5 0 0 -5 1 2 3 4 5 -10 -15 Tempo (s) Figura 5.7. Baixar. Voltagem:4.7V Com uma tensão de 4.7 V como apresenta a Figura 5.7, o movimento obtido é contínuo e a velocidade é média. Velocidade angular 100 80 60 40 20 0 0 1 2 3 Tempo (s) Velocidade angular ( ᵒ/s) Posição angular ( ᵒ) Posição angular 10 0 0 1 2 3 -10 -20 -30 Tempo (s) Figura 5.8. Baixar. Voltagem:4.6V Como mostra a Figura 5.8, com uma tensão de 4.6 V, o elo inferior desce com um movimento contínuo e velocidade alta. Velocidade angular 100 80 60 40 20 0 0 0.5 1 1.5 Tempo (s) 2 2.5 Velocidade angular ( ᵒ/s) Posição angular ( ᵒ) Posição angular 20 0 -20 0 1 2 3 -40 -60 Tempo (s) Figura 5.9. Baixar. Voltagem:4.5V 66 A Figura 5.9, com uma tensão de 4.5 V, apresenta um movimento contínuo e velocidade alta. Velocidade angular 100 80 60 40 20 0 0 0.5 1 1.5 2 2.5 Tempo(s) Velocidade angular (ᵒ/s) Posição angular (ᵒ) Posição angular 20 0 -20 0 -40 -60 -80 1 2 3 Tempo(s) Figura 5.10. Baixar. Voltagem:4.4V Com uma tensão de 4.4 V, como na Figura 5.10, o elo inferior desce com um Posição angular (ᵒ) Posição angular 100 80 60 40 20 0 0 0.5 1 1.5 2 Tempo (s) Velocidade angular (ᵒ/s) movimento contínuo e velocidade muito alta. Velocidade angular 20 0 -20 0 -40 -60 -80 -100 0.5 1 1.5 2 Tempo (s) Figura 5.11. Baixar. Voltagem:4.3V A Figura 5.11, com uma tensão de 4.3 V, apresenta um movimento contínuo e Posição angular Velocidade angular 100 80 60 40 20 0 0 0.5 1 Tempo (s) 1.5 Velocidade angular (ᵒ/s) Posição angular (ᵒ) velocidade muito alta. 20 0 -20 0 -40 -60 -80 -100 -120 -140 0.5 1 1.5 Tempo (s) Figura 5.12. Baixar. Voltagem:4 V 67 Com uma tensão de 4 V, como na Figura 5.12, o elo inferior desce com um movimento contínuo e velocidade muito alta. Analisou-se os gráficos anteriores da voltagem de entrada na válvula e a dificuldade ou facilidade para obter movimento quando nenhuma carga externa é aplicada no exoesqueleto. É possível concluir que para obter um movimento contínuo e suave para baixar e com uma velocidade adequada para o braço humano, a tensão de entrada deve ficar na faixa entre 4.8 e 4.6 V. Tipo de movimento: Subir. Uma voltagem superior entre 5.35 V até 10 V produz um deslocamento angular positivo e uma velocidade angular positiva. Velocidade angular 80 60 40 20 0 0 10 20 30 Tempo (s) Velocidade angular (ᵒ/s) Posição angular (ᵒ) Posição angular 6 4 2 0 -2 0 10 20 30 Tempo (s) Figura 5.13. Subir. Voltagem:5.5 V Na Figura 5.13, para uma tensão de 5.5 V, o movimento resultante para subir o elo inferior não contínuo e sua velocidade é muito baixa. Velocidade angular 100 80 60 40 20 0 0 2 4 6 8 10 Velocidade angular (ᵒ/s) Posição angular (ᵒ) Posição angular 10 8 6 4 2 0 -2 0 2 Tempo (s) 4 6 Tempo (s) 8 10 Figura 5.14. Subir. Voltagem:5.6 V. 68 Para uma tensão de 5.6 V, como na Figura 5.14 o movimento é contínuo e velocidade é baixa. Velocidade angular 80 60 40 20 0 0 1 2 3 4 Tempo (s) Velocidade angular (ᵒ/s) Posição angular (ᵒ) Posição angular 25 20 15 10 5 0 -5 0 1 2 Tempo (s) 3 4 Figura 5.15. Subir. Voltagem:5.7 V Na Figura 5.15, para uma tensão de 5.7 V, o movimento resultante é contínuo e sua velocidade é média. Velocidade angular 80 60 40 20 0 0 0.5 1 1.5 2 2.5 Tempo (s) Velocidade angular (ᵒ/s) Posição angular (ᵒ) Posição angular 40 20 0 0 0.5 1 -20 1.5 2 2.5 Tempo (s) Figura 5.16. Subir. Voltagem:5.8 V Para uma tensão de 5.8 V, como na Figura 5.16 o movimento é contínuo e velocidade é média. Velocidade angular 100 80 60 40 20 0 0 0.5 1 1.5 Tempo (s) 2 2.5 Velocidade angular (ᵒ/s) Posição angular (ᵒ) Posição angular 60 40 20 0 -20 0 1 2 3 Tempo (s) Figura 5.17. Subir. Voltagem:5.9 V 69 Como mostra a Figura 5.17, com uma tensão de 5.9 V, o elo inferior apresenta um movimento contínuo e velocidade alta. Velocidade angular Velocidade angular (ᵒ/s) Posição angular (ᵒ) Posição angular 100 80 60 40 20 0 0 0.5 1 1.5 2 Tempo (s) 80 60 40 20 0 -20 0 0.5 1 Tempo (s) 1.5 2 Figura 5.18. Subir. Voltagem:6 V Na Figura 5.18, para uma tensão de 6 V, o movimento resultante é contínuo e sua velocidade é média. Velocidade angular Velocidade angular (ᵒ/s) Posição angular (ᵒ) Posição angular 100 80 60 40 20 0 0 0.5 1 1.5 Tempo (s) 80 60 40 20 0 -20 0 0.5 1 Tempo (s) 1.5 Figura 5.19. Subir. Voltagem:6.1 V Para uma tensão de 6.1 V, como na Figura 5.19, o movimento é contínuo e velocidade é muito alta. Velocidade angular 100 80 60 40 20 0 0 0.5 1 Tempo (s) 1.5 2 Velocidade angular (ᵒ/s) Posição angular (ᵒ) Posição angular 100 50 0 0 -50 0.5 1 1.5 2 Tempo (s) Figura 5.20. Subir. Voltagem:6.2 V 70 Como mostra a Figura 5.20, com uma tensão de 6.2 V, o elo inferior apresenta um movimento contínuo e velocidade muito alta. Velocidade angular 100 80 60 40 20 0 0 0.5 1 1.5 Tempo (s) Velocidade angular (ᵒ/s) Posição angular (ᵒ) Posição angular 150 100 50 0 0 -50 0.5 1 1.5 Tempo (s) Figura 5.21. Subir. Voltagem:6.5 V Na Figura 5.21, para uma tensão de 6.5 V, o movimento é contínuo e velocidade é muito alta. Dos gráficos anteriores, quando nenhuma carga externa é aplicada no exoesqueleto, é possível concluir que para obter um movimento contínuo com uma velocidade adequada para subir o braço humano, a tensão de entrada deve ficar entre 5.6V e 5.8V. Tipo de movimento: manter a posição. Foi dito que quando nenhuma carga externa é aplicada ao exoesqueleto, é necessária uma voltagem de 5.35 V para que o elo do antebraço fique fixo numa posição qualquer. Foram desenvolvidos então alguns experimentos para determinar as tensões elétricas que a válvula precisaria para que o elo do antebraço fique fixo quando existem diferentes cargas externas. A Figura 5.22 apresenta os resultados destes testes. 71 Voltagem válvula (V) Voltagem da válvula vs Peso externo para manter a posição 5.55 5.5 5.45 5.4 5.35 5.3 0 2 4 Peso externo (Kg) 6 8 Figura 5.22. Gráfico da voltagem de entrada na válvula para manter a posião vs o peso externo. Segundo o experimento anterior, não foi possível achar uma curva característica de primeiro ou segundo grau para explicar o comportamento do sistema em função da voltagem na válvula e do peso externo. Concluiu-se que um controle por modos deslizantes é apropriado nesta aplicação devido a duas razões: Não são usados sensores de pressão para mapear as pressões internas das câmaras do cilindro, portanto não é possível usar a modelagem apresentada anteriormente que representa uma boa aproximação do comportamento do sistema. Pelos resultados dos experimentos realizados anteriormente. Foram desenvolvidos dois sistemas baseados no controle por modos deslizantes. O objetivo do primeiro controle é controlar a velocidade para subir e baixar o exoesqueleto para qualquer carga externa. O segundo controle tem como objetivo manter a última posição até onde o usuário comandou, ou posição onde o usuário quiser ficar. Precisa-se controlar a velocidade para subir ou baixar o elo do exoesqueleto devido à faixa do peso externo que os cilindros podem levantar, isso é entre 0 e 10 Kg. Uma voltagem de entrada na válvula pode dar uma velocidade angular adequada no caso de 0 Kg de peso externo, mas se com essa mesma voltagem o usuário quer levantar 10 Kg de carga externa, a nova velocidade obtida pode ser muito menor que no caso anterior. 72 Como o usuário comanda até onde subir ou baixar (com ajuda dos sensores de contato), um controle típico de posição desejada não é o controle mais adequado, senão o controle da última posição atingida ou posição onde o usuário quer ficar depois de se movimentar. Antes de projetar e aplicar o controlador no sistema, o modelo em malha aberta é explicado. Voltagem Vazão Válvula pneumática Sistema de planta Posição angular d/dt Velocidade angular Figura 5.23 Modelo em malha aberta. A Figura 5.23 representa o modelo básico em malha aberta. O sistema de planta é composto pelo conjunto dos cilindros pneumáticos e dos elos do braço e antebraço. Dependendo da posição angular, o potenciômetro fornece diferentes valores de voltagem. Quando o elo do antebraço atinge a posição máxima ou superior, ϴ2= 87ᴼ, o potenciômetro da uma voltagem de 2,7 V. Quando o elo fica na posição mínima ou inferior, ϴ2= 23ᴼ, o potenciômetro fornece uma voltagem de 3,67 V. Este valor da voltagem do potenciómetro é convertido ao valor correspondente da posição angular segundo um algoritmo matemático simples que considera esses valores máximos e mínimos da voltagem do potenciômetro e das posições angulares. A velocidade angular do elo é achada ao derivar o deslocamento angular no tempo. O sistema de planta da figura anterior, pode ser explicada ou considerada como o sistema composto pelo cilindro pneumático mais a estrutura mecânica do braço, como a Figura 5.24 exibe. Voltagem Válvula Válvula pneumática pneumática Vazão Cilindro Cilindro pneumático pneumático ΔX Estrutura Estrutura braço braço Δϴ d/dt d/dt Velocidade angular Figura 5.24. Expansão do bloco do sistema de planta. Para criar a malha fechada, a retroalimentação é da velocidade angular ou da última posição, segundo seja o tipo de movimento desejado (subir, descer ou manter a 73 posição). A última posição representa uma posição desejada que muda seu valor se o usuário sobe ou desce o antebraço. Estas duas malhas fechadas são apresentadas na Figura 5.25 e na Figura 5.26, respectivamente. Velocidade angular desejada Voltagem + Controlador Controlador - Válvula Válvula pneumática pneumática Vazão Velocidade angular ϴ Sistema Sistema de de planta planta d/dt d/dt Figura 5.25. Modelo em malha fechada do controle de velocidade. Última posição atingida + Voltagem Controlador Controlador - Válvula Válvula pneumática pneumática Vazão Sistema Sistema de de planta planta ϴ d/dt d/dt Velocidade angular Figura 5.26. Modelo em malha fechada do controle da última posição. 5.1 Controle por modos deslizantes O controle por modos deslizantes tem sua origem na teoria de sistemas de estrutura variável (VSS) desenvolvida na URSS nos anos 70 e até agora tem sido usado em muitas áreas industriais. Os controles clássicos precisam de um modelo de planta muito aproximado e no caso, por exemplo, de manipuladores, também precisam de uma boa estimação da carga externa. Além disso, para obter bons resultados, é necessário aplicar compensadores pelas estimações feitas e pelas perturbações existentes. No entanto, dependendo do tipo de sistema de planta, a aplicação destes compensadores pode ser complexa e também de alto custo (YOUNG, 1978). Para projetar um controle por modos deslizantes, uma modelagem do sistema da planta não é necessária. O importante é saber claramente os limites dos parâmetros do modelo ou sistema. Uma vantagem que apresenta um controle por modos deslizantes ou um sistema de estrutura variável é, por exemplo, a estabilidade assintótica do sistema resultante pela 74 interação de outras duas estruturas, nenhuma das quais é assintoticamente estável (UTKIN, 1977). Nesta referência, um exemplo simples, no entanto muito claro sobre esta vantagem, é apresentado. Considera-se o sistema de segunda ordem: ̈ 5.1 O sistema anterior apresenta duas estruturas, onde e . Com , como mostra a Figura 5.27. Figura 5.27. Representação do espaço de estado de ̈ . (UTKIN, 1977). É fácil observar na Figura 5.27 que nenhuma destas estruturas é assintoticamente estável. Todavia, se uma estrutura é projetada com uma lógica de chaveamento tal que: ̇ ̇ 5.2 A estabilidade assintótica é atingida como mostra a Figura 5.28. Figura 5.28. Sistema de estrutura variável assintoticamente estável. (UTKIN, 1977). No exemplo anterior, uma trajetória nova e desejada foi obtida pela composição de partes de trajetórias de diferentes estruturas. Mediante o controle de modos deslizantes é possível obter uma trajetória desejada que não seja inerente a nenhuma das estruturas base. Nesta trajetória, o sistema consegue atingir novos tipos de movimentos (por isso o nome: modos deslizantes). 75 Segundo GYEVIKI et al. (2010), a projeção de um controle por modos deslizantes se baseia em três etapas principais: 5.1.1 Escolha da superfície de deslizamento No caso do presente trabalho, considera-se que a dinâmica do sistema é função da posição do pistão: , da velocidade: ̇ e do sinal de entrada na válvula pneumática: u. ̈ ̇ 5.3 Para o caso desejado de manter a última posição do braço ou de qualquer elo , o erro se baseia na posição. 5.4 A superfície de deslizamento é escolhida como uma combinação linear de outras superfícies ou estruturas, como foi mostrado no exemplo da Figura 5.28. No caso do presente projeto, a superfície de deslizamento será escolhida como combinação linear entre o erro , e a derivada do erro ̇ da seguinte maneira: ̇ Onde 5.5 é um escalar para obter a combinação linear, mas é também um parâmetro cujo valor determina o comportamento do sistema. Se tem um valor pequeno, a resposta do sistema é lenta, mas bastante precisa. Por outro lado, se é grande, o sistema vai responder rapidamente e no caso ideal o chaveamento do sinal terá uma frequência infinita. Entretanto, na implementação prática, como não é possível atingir a frequência de oscilação infinita, o chaveamento terá oscilações de alta frequência e amplitude finita. Este fenômeno indesejado é chamado trepidação (chattering) (EVANGELISTA, 2012). As trajetórias iniciais do sistema são forçadas para atingir a linha de chaveamento ou superfície de deslizamento e manter o movimento dentro dessa superfície até chegar á origem, tal que: ̇ 5.6 Antes do sistema chegar à superfície de deslizamento, encontra-se na fase de aproximação, e quando chegar, passa à fase de deslizamento, isto é possível olhar na representação no espaço de estado como mostra a Figura 5.29. 76 Figura 5.29. Represetação no espaço de estado do movimento de deslizamento (HOLLAND, C., 2002) 5.1.2 Escolha da lei do controle para manter a trajetória do sistema na superfície de deslizamento. O objetivo da lei do controle é forçar o sistema ao longo da trajetória desejada para atingir a superfície de deslizamento. Esta superfície também é chamada superfície de chaveamento, porque para que o sistema fique trabalhando nessa superfície depois de atingi-la, o controle precisa de sinais descontínuos ou diferentes ganhos (chaveamento) dependendo da configuração atual do sistema. Na referência GYEVIKI et al. (2010) vemos que para garantir que o controle consiga forçar à trajetória do sistema até chegar à superfície de deslizamento, a estratégia de controle deve satisfazer a condição: ̇ ̇ ̇ ̈ 5.7 Para isso: ̇ ̇ ̈ ̇ ̈ 5.8 Substituindo a equação 5.3 na equação anterior: ̇ Se , então ̇ ̇ ̇ ̇ ̇ 5.9 para satisfazer a equação 5.7. Isso quer dizer que o controle tem que ir mudando de sinal e a lei de controle mais simples para cumprir a condição é: 5.10 77 e ̇ Cumprindo o movimento de deslizamento, , pode-se ter um controle contínuo através de uma estimativa de um controle equivalente, ̂ , que consiga manter o sistema dentro da superfície de deslizamento atingida na primeira fase. Com isto o controle ficaria: ̂ 5.11 Onde o termo descontínuo, , compensa os efeitos das perturbações e falta de precisão do modelo de planta. Por conseguinte, quanto maior aproximação do modelo, menor será o valor do termo descontínuo. 5.1.3 Implementação do algoritmo para evitar a trepidação. Na implementação, devido à existência de atrasos no chaveamento do sinal, por exemplo, pela baixa frequência de trabalho de alguns atuadores; por pequenas constantes de tempo não consideradas, etc., os sistemas podem não alcançar a superfície ideal de deslizamento desejada ficando com trepidação. Um modo de evitar este fenómeno é trocando a função que produz a descontinuidade por uma função tangente hiperbólica (como na Figura 5.30) e um fator para evitar à tangente hiperbólica chegar até os seus limites: ̂ ̂ [ ̇ ] 5.12 Figura 5.30. Função tangente hiperbólica. Se o controle trabalha diretamente nos valores limites que a função tangente hiperbólica pode apresentar (-1, 1), o sinal de controle seria como mostra a Figura 5.31. 78 Figura 5.31. Sinal de controle, u, para valores da tangente hiperbólica: -1, 1. Se o controle fica trabalhando entre estes valores, o efeito de trepidação pode ocorrer, portanto, os valores dos parâmetros: [ que: ̇ ] e devem ser escolhidos de tal maneira , como exibe a Figura 5.32. Figura 5.32.Sinal de controle, u, para [ ̇ ] . Antes de fazer a experimentação no sistema do antebraço, uma simulação foi desenvolvida com dois propósitos principais. O primeiro foi observar como é o comportamento das pressões internas das câmaras do cilindro, já que não são usados sensores de pressão. O segundo propósito é sintonizar os parâmetros do controle por modos deslizantes que possam ser uma base para os verdadeiros valores do sistema experimental. 5.2 Simulação do sistema aplicando o controle por modos deslizantes. 79 Com as equações achadas na modelagem matemática e a relação entre sinal de entrada vs área do orifício da válvula, foi desenvolvida uma simulação implementada em ambiente Matlab/Simulink. O controle aplicado nesta simulação é o controle por modos deslizantes descrito no item anterior. Na referência MENG et al. (2011) foi usada a válvula proporcional MPYE-51/8-HF-010B (700 l/min, 6 mm diâmetro máx.) da Festo, a qual pertence à mesma família da válvula usada neste projeto: MPYE-5-1/8-LF-010B (350 l/min, 4 mm diâmetro máx.). Um dos objetivos desta referência foi achar uma relação entre o sinal de voltagem na entrada e a área do orifício da válvula, como exibe a Figura 5.33. Isto foi possível com a ajuda de sensores de escoamento mássico e sensores de pressão. Figura 5.33. Áreas de entrada e saída da válvula vs. sinal de entrada (MENG et al., 2011). Como no presente trabalho não são usados sensores de escoamento mássico nem sensores de pressão, a relação achada pela referência anterior foi empregada após se fazer a correspondente adaptação para a diferente área. A Figura 5.34 apresenta o programa desenvolvido mediante as equações encontradas na modelagem matemática. Os principais blocos que o programa apresenta são: um bloco correspondente ao controle por modos deslizantes, um bloco da relação entre a tensão de entrada (sinal de controle) e a área do orifício da válvula. Outro bloco importante é o correspondente à parte pneumática. As saídas dele são as pressões de entrada e saída das câmaras do cilindro e suas vazões. As pressões do bloco anterior são entradas do bloco correspondente à parte mecânica porque a partir delas é achada a força do cilindro pneumático. Logo, são calculados os torques e mediante a dinâmica da estrutura, são calculadas a aceleração, velocidade e posição angular do elo inferior. 80 Figura 5.34. Programa da simulação computacional no ambiente Matlab/Simulink. Os valores dos parâmetros do controle por modos deslizantes usado na simulação são: ̂ , , , . A simulação foi desenvolvida para uma carga externa de 120 N no efetuador do manipulador, partindo de uma posição angular de 0.1° e uma posição desejada de 40°. Como resultados das simulações, a Figura 5.35 e a Figura 5.36 apresentam a posição angular e o erro respectivamente. Figura 5.35. Posição angular do elo inferior obtida na simulação. 81 Figura 5.36. Resultado do erro ao longo do tempo. Segundo os parâmetros sintonizados, ̂ e , o sinal de controle pode varia na faixa de 3 V até 8 V. O resultado do sinal de controle obtido da simulação fica dentro desta faixa como mostra a Figura 5.37 Figura 5.37. Sinal de controle obtido da simulação. Da figura anterior, é possível dizer que a maior parte do tempo, o sinal de controle é maior que 5V. Isto produz um deslocamento ascendente do elo do antebraço. O sinal de controle faz que a área da válvula pneumática troque. Consequentemente as vazões mássicas e as pressões trocam também no interior das câmaras dos cilindros. 82 Para obter um deslocamento ascendente, a pressão e a vazão mássica da câmara da entrada devem ser maiores que da câmara da saída respectivamente. Isto é confirmado segundo os resultados da Figura 5.38 e da Figura 5.39. Figura 5.38. Pressões obtidas na simulação. Figura 5.39. Vazões mássicas das câmaras do cilindro pneumático A força resultante das pressões achadas é apresentada na Figura 5.40. 83 Figura 5.40. Força do cilindro pneumático. 5.3 Controle por modos deslizantes com superfície deslizante PID. Para manter fixa a última posição, uma variação do típico controle por modos deslizantes foi também aplicada no sistema. A Figura 5.41 mostra o sistema com o controle por modos deslizantes com superfície deslizante PID (EKER, 2005). Ûeq Ûeq Kp Kp ϴ2d + e(t) + Kd Kd - d/dt d/dt s(t) + + tanh(s) tanh(s) + δδ + u(t) Sistema Sistema de de planta planta ϴ2 Ki Ki Figura 5.41. Diagrama de blocos do controle por modos deslizantes com superfície deslizante PID. A superfície de deslizamento, , é achada como: ̇ 5.13 84 Onde é o ganho proporcional, é o ganho derivativo, e é o ganho integral. Para que o sistema fique na superfície deslizante s(t) deve cumprir com a condição ̇ . Isto é: ̇ ̈ 5.14 O sistema é assintótica e globalmente estável quando: 5.15 Para cumprir com a equação 5.15, os ganhos , , na equação 5.14 devem ser escolhidos de tal maneira que a raízes deste polinômio fiquem no plano complexo (WAI et al., 2004). Finalmente o sinal de controle é: ̂ ̂ ( ̇ ) 5.16 Neste capítulo foi apresentado o controle por modos deslizantes e a simulação desenvolvida no sistema aplicando este tipo de controle. Também foi apresentada uma variação do controle por modos deslizantes, chamada controle por modos deslizantes com superfície de deslizamento PID, mas não foi desenvolvida nenhuma simulação com este último controle. 85 6 CAPÍTULO 6 Programação e resultados. 6.1 Programação. Para obter os sinais dos sensores e aplicar os controles descritos no capítulo anterior, a programação foi desenvolvida no software Labview. Para adquirir os dados com ajuda da placa NI9234 (4 entradas analógicas) da National Instrument no software LabView, foi escolhida a frequência de aquisição de 1000 Hz, tendo em conta principalmente a teoria da frequência de Nyquist: 6.1 Onde é a frequência de Nyquist. O teorema diz que para uma reconstrução adequada do sinal, a frequência de Nyquist deve ser maior que a maior frequência do sinal analógico de entrada , isto é: 6.2 Portanto, a frequência de amostragem deve ser pelo menos duas vezes a frequência do sinal analógico de entrada. 6.3 A placa NI9234 faz a aquisição dos sinais analógicos de voltagem do potenciômetro e dos sensores de contato. 86 O valor da voltagem do potenciômetro é transformado em posição angular com ajuda dos valores máximos e mínimos de voltagem e posição angular do mecanismo como mostra a Figura 6.1. Figura 6.1. Aquisição de dados, trasformação da voltagem do potenciômetro a posição angular (em graus). A posição angular é derivada no tempo para determinar a velocidade angular correspondente. Antes de usar os dados da velocidade angular, utilizou-se um filtro passa baixa com frequência de corte de 5Hz. Isto é exibido na Figura 6.2. Figura 6.2. Velocidade angular achada ao derivar a posição angular. Se o usuário quer subir ou baixar, os sensores de contato vão reconhecer qual tipo de movimento o usuário quer fazer, então é aplicado o respectivo controle de velocidade para subir ou baixar. Se o usuário quer manter fixa a posição do seu antebraço, os sensores de contato não obtêm sinal e o controle que é aplicado é para manter a última posição. 87 As seguintes figuras (Figura 6.3, Figura 6.4 e Figura 6.5) apresentam os programas para controlar os movimentos para subir, descer e manter a posição. Figura 6.3. Controle para subir. Figura 6.4. Controle para baixar. 88 Figura 6.5. Controle para manter a última posição. Sempre é aplicado somente um dos controles, nunca dois controles ao mesmo tempo. Para gerar o movimento correspondente com o sinal do controle, a placa NI9263 (de 4 saídas analógicas) da National Instruments envia uma voltagem entre 0 e 10 volts à válvula (Figura 6.6). Dependendo deste sinal, a válvula aumenta ou diminui o diâmetro do seu orifício ou troca de posição do carretel, mudando assim a direção do escoamento mássico do ar comprimido e assim também a direção do deslocamento angular do antebraço. Figura 6.6. Sinal de saída. A Figura 6.7 mostra o painel para trocar os parâmetros de cada controle, o arquivo para salvar os dados obtidos com cada teste e outros dados, como por exemplo, a ferramenta para uma nova calibração. 89 Figura 6.7. Paniel para o usuário. 6.2 Resultados. Para fazer uma comparação do desempenho dos dois controles referidos no capítulo anterior, foi feito um experimento no qual o elo inferior partiu da posição angular de 79ᴼ e a posição final desejada foi escolhida em 60ᴼ. 6.2.1.1 Posição vs tempo. A Figura 6.8 apresenta a posição angular em função do tempo para os dois controles. Foi aplicada uma entrada de voltagem entre 4.8 e 5.7 V. 90 Figura 6.8. Comparação da posição angular vs tempo dos controles SMC- por modos deslizantes e o controle PID+SMC (superficie deslizante PID). Para uma voltagem entre 4.8 e 5.7 Volts. A Figura 6.9 também apresenta a posição angular em função do tempo para os dois controles, mas com uma entrada de voltagem entre 4.7 e 5.7 V. Figura 6.9. Comparação da posição angular vs tempo dos controles SMC- por modos deslizantes e o controle PID+SMC (superficie deslizante PID). Para uma voltagem entre 4.7 e 5.7 Volts. 91 6.2.1.2 Erro vs tempo. A Figura 6.10 exibe o erro obtido ao aplicar cada um dos dois controles. Foi aplicada uma entrada de voltagem entre 4.8 e 5.7 V. Figura 6.10. Comparação do erro de posição vs tempo dos controles SMC- por modos deslizantes e o controle PID+SMC (superficie deslizante PID). Para uma voltagem entre 4.8 e 5.7 Volts. A Figura 6.11 apresenta o erro obtido para os dois controles, com entrada de voltagem entre 4.7 e 5.7 V. Figura 6.11. Comparação do erro de posição vs tempo dos controles SMC- por modos deslizantes e o controle PID+SMC (superficie deslizante PID). Para uma voltagem entre 4.7 e 5.7 Volts. 92 6.2.1.3 Sinal no tempo. A Figura 6.12 apresenta o sinal de controle ao longo do tempo dos dois tipos de controles, com uma entrada de voltagem entre 4.8 e 5.7 V. Figura 6.12. Comparação do sinal de controle vs tempo dos controles SMC- por modos deslizantes e o controle PID+SMC (superficie deslizante PID). Para uma voltagem entre 4.8 e 5.7 Volts. A Figura 6.13 exibe o sinal de controle obtido por cada controle, com uma entrada de voltagem entre 4.7 e 5.7 V. Figura 6.13. Comparação do sinal de controle vs tempo dos controles SMC- por modos deslizantes e o controle PID+SMC. Para uma voltagem entre 4.7 e 5.7 Volts. 93 A Figura 6.14 exibe os valores do erro pela derivada do erro obtidos ao aplicar o controle por modos deslizantes para uma tensão entre 4.8 V e 5.7 V. Figura 6.14 . Erro vs Derivada do erro. Controle SMC. Para uma voltagem entre 4.8 V e 5.7 V. A Figura 6.15 mostra os valores do erro pela derivada do erro, os quais foram obtidos ao aplicar o controle por modos deslizantes para uma tensão entre 4.7V e 5.7 V. Figura 6.15. Erro vs Derivada do erro. Controle SMC. Para uma voltagem entre 4.7 V e 5.7 V. 94 A Figura 6.14 e a Figura 6.15 são a representação do espaço de estado do sistema. Nestas figuras é possível olhar os estados do sistema até atingir a linha de deslizamento. A Figura 6.16 apresenta os valores obtidos do erro, derivada do erro e integral do erro ao aplicar o controle com superfície deslizante PID para uma tensão entre 4.8 V e 5.7 V. No caso deste controle, têm-se não só o erro e a derivada do erro, senão também a integral do erro. Figura 6.16. Erro vs Derivada do erro vs Integral do erro. Controle PID+SMC. Para uma voltagem entre 4.8 e 5.7 Volts. A Figura 6.17 exibe os valores do erro, derivada do erro e integral do erro ao aplicar o controle com superfície deslizante PID para uma tensão entre 4.7 V e 5.7 V. Figura 6.17. Erro vs Derivada do erro vs Integral do erro. Controle PID+SMC. Para uma voltagem entre 4.7 e 5.7 Volts. 95 Comparando os resultados obtidos com os dois tipos de controle, é evidente que o desempenho do controle por modos deslizantes com superfície deslizante PID é superior que o desempenho do controle tradicional por modos deslizantes. Com o controle de superfície deslizante PID, a velocidade é maior, mas sempre obtendo um movimento contínuo e suave. Ele atinge um erro estacionário baixo e em menor tempo que o outro controle. Todas estas diferenças são explicadas ao olhar os sinais de controle obtidos. É evidente que o esforço que a válvula pneumática tem que fazer com o controle com superfície deslizante PID é menor e o desempenho é melhor. Tendo escolhido o controle com superfície deslizante PID como o melhor controle para esta aplicação, testes finais foram desenvolvidos para diferentes pesos. Os ganhos sintonizados para o controle de modos deslizantes com superfície deslizante PID saõ: Kp = 0.5; Kd = 0.03; Ki = 0.001 e com ̂ e . A Figura 6.18, Figura 6.19 e Figura 6.20 apresentam os valores da posição angular, velocidade angular e erro respectivamente, obtidos ao aplicar 2 Kg de carga externa. Posição angular (ᴼ) Posição angular 100 80 60 40 20 0 0 5 10 15 20 Tempo (s) Figura 6.18. Posição angular por tempo para 2 Kg de carga externa. Voltagem entre 4.7V e 5.7V. 96 Velocidade angular Velocidade angular (ᴼ/s) 5 0 0 5 10 15 20 -5 -10 -15 Tempo (s) Figura 6.19. Velocidade angular por tempo para 2 Kg de carga externa. Voltagem entre 4.7V e 5.7V. Erro 5 Erro (ᴼ) 0 -5 0 5 10 15 20 -10 -15 -20 Tempo (s) Figura 6.20. Erro ao longo do tempo para 2 Kg de carga externa. Voltagem entre 4.7V e 5.7V. . A Figura 6.21, Figura 6.22 e Figura 6.23 exibem a posição angular, velocidade angular e erro respectivamente, para uma carga externa de 4 Kg. 97 Posição angular Posição angular (ᴼ) 100 80 60 40 20 0 0 5 10 15 20 25 Tempo (s) Figura 6.21. Posição angular por tempo para 4 Kg de carga externa. Voltagem entre 4.7V e 5.7V. Velocidade angular (ᴼ/s) Velocidade angular 5 0 0 5 10 15 20 25 -5 -10 -15 Tempo (s) Figura 6.22. Velocidade angular por tempo para 4 Kg de carga externa. Voltagem entre 4.7V e 5.7V. Erro 5 Erro (ᴼ) 0 -5 0 5 10 15 20 25 -10 -15 -20 Tempo (s) Figura 6.23. Erro ao longo do tempo para 4 Kg de carga externa. Voltagem entre 4.7V e 5.7V. 98 A Figura 6.24, Figura 6.25 e Figura 6.26 apresentam a posição angular, velocidade angular e erro respectivamente, ao aplicar uma carga externa de 4 Kg. Posição angular (ᴼ) Posição angular 100 80 60 40 20 0 0 5 10 15 20 Tempo (s) Figura 6.24. Posição angular por tempo para 6 Kg de carga externa. Voltagem entre 4.7V e 5.7V. Velocidade angular (ᴼ/s) Velocidade angular 2 0 -2 0 5 10 15 20 -4 -6 -8 -10 -12 Tempo (s) Figura 6.25. Velocidade angular por tempo para 6 Kg de carga externa. Voltagem entre 4.7V e 5.7V. 99 Erro 5 Erro (ᴼ) 0 -5 0 5 10 15 20 -10 -15 -20 Tempo (s) Figura 6.26. Erro ao longo do tempo para 6 Kg de carga externa. Voltagem entre 4.7V e 5.7V. 100 7 CAPÍTULO 7 Conclusões A modelagem matemática foi útil para entender o comportamento do sistema, porém não foi empregada no programa e implementação do controle. Seu desenvolvimento foi importante para saber como é a evolução das pressões e vazões mássicas nas câmaras do cilindro pneumático e, portanto também para saber como a força do cilindro troca. O erro obtido na simulação não foi pequeno, mesmo assim, ela foi útil como uma base para a sintonização dos parâmetros reais do controle por modos deslizantes. A válvula pneumática utilizada neste trabalho e o controle com superfície deslizante PID foram pontos-chave para obter bons resultados sem a necessidade de sensores de pressão nem sensores de vazão mássica. A válvula pneumática empregada foi muito útil para simplificar o esforço feito para controlar o sistema completo. Seu controle interno assegura duas coisas importantes só com um sinal de tensão, estas são: a posição correta do seu carretel e o diâmetro do orifício da válvula. A diferença no desempenho entre o controle por modos deslizantes e o controle com superfície deslizante PID é evidente enquanto à rapidez de resposta e obtenção de movimento contínuo. Segundo os resultados apresentados anteriormente, o objetivo de obter movimentos seguros, suaves e naturais com relação ao movimento do braço humano foi atingido ao aplicar o controle por modos deslizantes com superfície deslizante PID. 101 Em geral, devido às não linearidades próprias dos sistemas pneumáticos, eles são mais complicados para controlar e obter bons resultados que, por exemplo, sistemas elétricos. Porém, os motores elétricos que se precisam para o presente exoesqueleto carregar 10 Kg, são grandes e pesados. Neste caso, o sistema pneumático escolhido foi vantajoso devido a sua alta relação de força-peso e os movimentos suaves obtidos. A principal finalidade deste exoesqueleto que é potenciar a capacidade física do braço humano foi cumprida. O exoesqueleto é capaz de carregar um peso externo de até 10 Kg com uma boa velocidade, com movimento contínuo e suave e sobre tudo reduzindo o esforço que o usuário precisaria fazer. Devido aos movimentos contínuos e suaves obtidos, o presente exoesqueleto poderia ser usado também na área de reabilitação, sendo importante a criação de trajetórias específicas. Uma maneira de melhorar os resultados obtidos é empregando sensores mais precisos, por exemplo, um encoder em vez do potenciômetro. E também um sensor específico para aquisição de velocidade, deste modo ao não precisar derivar o sinal de posição para obter a velocidade, o ruído consequente da derivada não perturba os resultados. Outra maneira de melhorar a resposta do sistema é aplicando a compensação do atrito gerado pelo selo no interior do cilindro pneumático. O qual é possível, ao empregar sensores de pressão, mas isso encareceria o custo do exoesqueleto. 102 REFERÊNCIAS BIBLIOGRÁFICAS BLAGOJEVIĆ, V., STOJILJKOVIĆ, M., VESELIĆ, B., 2010, "Advantages of digital sliding mode position control of the rodless pneumatic cylinder", Facta Universitatis. Series: Automatic Control and Robotics, v. 9, n. 1, 2010, pp. 95 – 102. BOROW, J. E., MCDONELL, B. W., 1998, "Modeling, identification and control of a pneumatically actuated, force controllable robot", IEEE Transactions on Robotics and Automation, v. 14, n. 15, pp. 732 – 742. BURROWS, C.R., WEBB, C.R., 1966, “Use of root loci in design of pneumatic servo motors”, Control 8, pp. 423–427. CARNEIRO, J. F., ALMEIDA F. G., 2006, "Reduced-order thermodynamic models for servo-pneumatic actuator chambers", In: Proceedings of the Institution of Mechanical Engineers, Part I: Journal of Systems and Control Engineering, v. 220, n. 4, pp. 301314. CAVALLARO, E. E., ROSEN, J., PERRY, J. C, BURNS, S., 2006, "Real-Time Myoprocessors for a Neural Controlled Powered Exoskeleton Arm", IEEE transactions on biomedical engineering, v. 53, n. 11, pp. 2387 – 2396. Eker, İ., 2006, “Sliding mode control with PID sliding surface and experimental application to an electromechanical plant”, ISA Transactions, v. 45, n. 1, pp. 109–118. EVANGELISTA, C. A., 2012, Control de sistemas no lineales por modos deslizantes de segundo orden. Aplicación a la conversión de energía eólica. Tesis doctoral. Universidad Nacional de La Plata. Argentina. FOK, S.C., ONG, E.K., 1999, “Position control and repeatability of a pneumatic rodless cylinder system for continuous positioning”, Robotics and Computer Integrated Manufacturing, v. 15, n. 5, pp. 365-371. FUJIWARA, A., KATSUMATA, K., ISHIDA, Y., 1995, “Neural network based adaptive I-PD controller for pneumatic cylinder”, Proceedings of the SICE Annual Conference, pp. 26-28. FRENCH, L. G., COX, C. S., 1988, “The robust control of a modern electropneumatic actuator”, International Conference on Control, pp. 47 – 52. GOPURA, R. A. R. C., KIGUCHI, K., LI, Y., 2009, "SUEFUL-7: A 7DOF UpperLimb Exoskeleton Robot with Muscle-Model-Oriented EMG-Based Control", In: The 103 2009 IEEE/RSJ International Conference on Intelligent Robots and Systems, pp. 1126 1131. GULATI, N., BARTH, E., 2005, "Pressure observer based servo control of pneumatic actuators", Proceedings of the 2005 IEEE/ASME International conference on Advanced Intelligent Mechatronics, pp. 498 – 503. GYEVIKI, J., 2010, "LabView based position control for a pneumatic cylinder", International Journal of Engineering, v. 8, n. 1, pp. 25-32. HOLLAND, C., 2002, “DSP improves control of SMPS”, Embedded Systems (Europe). KAZEROONI, H., 2004, "Pneumatic force control for robotic systems", Proceedings of the IEEE International Conference on Mechatronics, pp. 231 – 236. KIGUCHI, K., IMADA, Y., LIYANAGE, M., 2007, "EMG-Based Neuro-Fuzzy Control of a 4 DOF upper-limb power-assist exoskeleton", In: 29th Annual International Conference of the IEEE Engineering in Medicine and Biology Society, pp. 3040 – 3043. KIGUCHI, K., KARIY, S., WATANABE, K., IZUMI, K., FUKUDA T., 2001. "An exoskeletal robot for human elbow motion support - sensor fusion, adaptation, and control", IEEE Transactions on Systems, Man, and Cybernetics, Part B: Cybernetics, v. 31, n. 3, pp. 353 – 361. LI, B., LI, Z., XU, Y., 1997, “Study on adaptive control for a pneumatic position servo system”, Advances in Modelling and Analysis, v. 49, n. 2, pp. 21-28. MATSUKUMA, T., FUJIWARA, A., NAMBA, M., ISHIDA, Y., 1997, “Nonlinear pid controller using neural networks”, Proceedings of IEEE International Conference on Neural Networks, v. 2, pp. 811-814. McCLOY, D., MARTIN, H.R., 1980, Control of Fluid Power: Analysis and Design, 2 ed., New York, Ellis Horwood Limited. McLATCHEY, G., BILLINGSLEY, J., 2006, "Force and position control using pneumatic cylinders", 9th International Conference on Climbing and Walking Robots, Bélgica. MENG, D., TAO, G., CHEN, J., BAN, W., 2011, "Modeling of a pneumatic system for high-accuracy position control", International Conference on Fluid Power and Mechatronics, pp. 505 – 510. MOVELLAN, J. R., 2009, “Pneumatic cylinder model”, Tech. rep., Machine Perception Laboratory at the University of California, USA. 104 MURRAY, R. M., LI, Z., SASTRY, S. S., 1994, A mathematical introduction to robotic manipulation , Boca Raton, USA, CRC Press. NGUYEN, T., LEAVITT, J., JABBARI, F., BOBROW, J., 2007, "Accurate slidingmode control of pneumatic systems using low-cost solenoid valves", IEEE/ASME Transactions on Mechatronics, v. 12, n. 2, pp. 216 – 219. PERRY, J. C., ROSEN, J., 2006, "Design of a 7 degree-of-freedom upper limb powered exoskeleton", In: Proceedings of the IEEE International Conference on Biomedical Robotics and Biomechatronics (BioRob), pp. 805 – 810. PERRY, J. C., ROSEN J., BURNS, J. S., 2007, “Upper-limb powered exoskeleton design”, IEEE/ASME Transactions on Mechatronics, v. 12, n. 4, pp. 408 – 417. PU, J., MOORE, P.R., HARRISON R., WESTON, R.H., 1993, “A study of gainscheduling method for controlling the motion of pneumatic servos”, Sixth Bath International Fluid Power Workshop - Modeling and Simulation, pp. 193-209. REINKENSMEYER, D. J., KAHN, L. E., AVERBUCH, M., MCKENNA-COLE, A., SCHMIT, B. D., RYMER, W. Z., 2000, “Understanding and treating arm movement impairment after chronic brain injury: Progress with the ARM guide”. Journal of Rehabilitation Research and Development, v. 37, n. 6, pp. 653–662. RUÍZ, A., 2008, Sistema robótico multimodal para análisis y estudios en biomecánica, movimiento humano y control neuromotor, Tesis doctoral. Universidad Carlos III de Madrid, Madrid, España. SHEARER, J.L., 1956, “Study of pneumatic process on the continuous control of motion with compressed air”, Transactions of ASME, n. 78, pp. 233-249. SHEN, X., GOLDFARB, M., 2007, "Simultaneous force and stiffness control of a pneumatic actuator", Journal of Dynamic Systems, Measurement and Control, v. 129, n. 4, pp. 425-434. SHU, N. AND M.B. GARY, 2005. “Development of a nonlinear dynamic model for a servo pneumatic positioning system”, Proceedings of the IEEE International Conference on Mechatronics and Automation, v. 1, pp. 43-48. ŠITUM, Ž., PETRIĆ, J., CRNEKOVIĆ, M., 2003, "Sliding Mode Control Applied to Pneumatic Servo Drive", In: Proceedings of 11th Mediterranean Conference on Control & Automation (MED'03). 105 STEGER , R., KIM, S. H., KAZEROONI, H., 2006, "Control scheme and networked control Architecture for the Berkeley Lower Extremity Exoskeleton (BLEEX)", IEEE International Conference on Robotics and Automation, pp. 3469 – 3476. TANAKA, K., SHIMIZU, A., SAKATA, K., 1994, “Adaptive pole-placement control for pneumatic servo systems with constant disturbances”, Transaction on Society of Instrument and Control Engineers, v. 30, pp. 1069-1076. TANAKA, K., YAMADA, Y., SATOH, T., UCHIBORI, A., UCHIKADO, S., 1999, “Model reference adaptive control with multi-rate type neural network for electropneumatic servo system”, In: Proccedings IEEE Conference on Control Applications, pp. 1716-1721. UTKIN, V., 1977, “Variable structure systems with sliding modes”, IEEE Transactions on Automatic Control, v. 22, n. 2, pp. 212 – 222. VAUGHAN, D.R., 1965, “Hot-gas actuators: Some limits on the response speed”, Transactions of ASME J. Basic Eng., pp. 113–119. WAI, R. J., LIN, C. M., HSU, C. F., 2004, “Adaptive fuzzy sliding mode control for electrical servo drive”, Fuzzy Sets Syst. 143, pp. 295–310. WIKANDER, J., 1988, Adaptive Control of Pneumatic Cylinders. Doctoral thesis, Royal Institute of Technology, Suécia. XIANG, F., 2001, Block-Oriented Nonlinear Control of Pneumatic Actuator Systems, Doctoral Thesis, Department of Machine Design Royal Institute of Technology, Stockholm, Suécia. YEH, T.-J., WU, M-J., LU, T-J., WU, F-K, HUANG, C-R, 2010, “Control of McKibben pneumatic muscles for a power-assist, lower-limb orthosis”, Elsevier Mechatronics, v. 20, n. 6, pp. 686–697. YOUNG, K-K. D., 1978, “Controller design for manipulator using theory of variable structure systems”, IEEE Transaction on Systems, Man and Cybernetics, v. 8, n. 2, pp. 101 – 109. ZOSS, A., KAZEROONI, H., CHU, A., 2005, “On the Mechanical Design of the Berkeley Lower Extremity Exoskeleton (BLEEX)”. IEEE/RSJ International Conference on Intelligent Robots and Systems, pp. 3465 – 3472. 106
Baixar