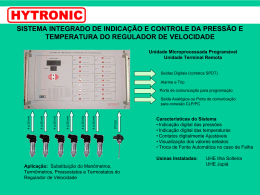
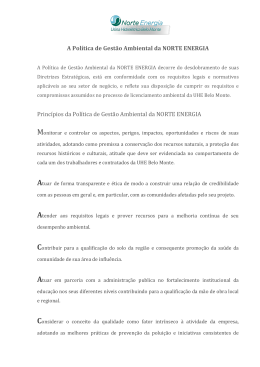
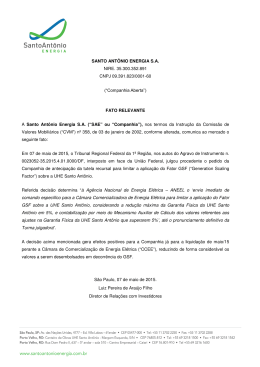
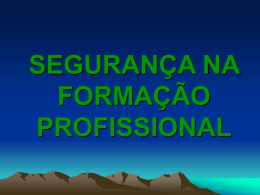
484 IEEE LATIN AMERICA TRANSACTIONS, VOL. 6, NO. 5, SEPTEMBER 2008 Maintenance and Assembly Training in a Hydroelectric Unit of Energy Using Virtual Reality Desktop Marcos Paulo Alves de Sousa, Alcides Renato da Silva Pamplona Junior, Manoel Ribeiro Filho, Felipe Vaz Reis Abstract-— This article presents a training system for a hydroelectric unit of energy (UHE) by using Virtual Reality Desktop techniques. The system has two training modules: the first one, assembly module, allows the trainer to virtually execute the real assembly sequences of the concrete and the UHE equipments. The second one, maintenance module, which uses the learning approach based on practice, offers different levels of training, divided in three modes: automatic, guided and exploratory. These modes are accessed according to the trainer’s acquired degree of knowledge compared to the maintenance procedures. The results of the system implantation show the potentiality of using Virtual Reality Desktop in huge industrial projects training. Keywords— Virtual Reality; interactive training; computational simulation; energy systems N I. INTRODUÇÃO as últimas décadas, os centros de treinamento de empreendimentos de engenharia vêm passando por grandes transformações para atender uma demanda cada vez maior por técnicos altamente qualificados, principalmente quando envolve manutenção de peças de grande porte, como por exemplo, equipamentos em usinas nucleares, siderúrgicas ou hidrelétricas, onde a interrupção das atividades regulares ocasionada por um erro de procedimento poderá acarretar em danos incalculáveis, e inclusive colocar em risco a vida dos técnicos envolvidos. O ambiente tradicional em manutenção, basicamente formado por aulas teóricas, vídeo-aulas, modelos de peças reais e utilização de manuais impressos, vem apresentando várias limitações e representa um alto custo de manutenção aos centros de treinamento [1], e por esta razão, novas tecnologias têm sido pesquisadas para melhorar o nível de treinamento de equipes especializadas, uma delas é a Realidade Virtual [2], permitindo que o treinando possa manipular facilmente peças de difícil visualização e acesso, além disso, poderá ser oferecida ao usuário a sensação de estar na planta real utilizando modelos de peças realistas, a possibilidade de realizar procedimentos de montagem que nem sempre estão previstos em manuais, e a oportunidade de simular situações de erro sem impactar na produção real. A importância do treinamento do processo de montagem Os autores agradecem o apoio oferecido pelo projeto de P&D financiado pela ELETRONORTE (Centrais Elétricas do Norte do Brasil S.A.) e desmontagem de equipamentos de uma Unidade Hidrelétrica de Energia (UHE) [3] impactará diretamente na qualidade da geração de energia e no nível de risco operacional. A UHE é um processo contínuo de produção em que a energia hidráulica é convertida em energia mecânica, e finalmente, em energia elétrica. O presente trabalho propõe um sistema de treinamento de procedimentos de montagem e desmontagem de peças contidas em uma UHE utilizando técnicas de Realidade Virtual não imersiva, atendendo aos principais requisitos de treinamento virtual disponíveis nas referências [1] [4] [5] [6][14][15][19]. O ambiente de treinamento é formado pelo Curso de Montagem, que corresponde ao procedimento de montagem real do concreto e dos equipamentos, e do Curso de Manutenção, que corresponde aos procedimentos de treinamento de manutenção das sub-unidades das seções da UHE. A seção 2 apresenta uma contextualização da Realidade Virtual e suas aplicações em treinamento de manutenção industrial. A seção 3 mostra a proposta de estudo do sistema de treinamento em manutenção em uma UHE usando técnicas de RV não imersiva. A seção 4 apresenta os cursos de montagem e manutenção. A seção 5 mostra uma avaliação do sistema, e na seção 6, são feitas as considerações finais. II. REALIDADE VIRTUAL E SUAS APLICAÇÕES EM MONTAGEM E TREINAMENTO DE MANUTENÇÃO INDUSTRIAL O aumento da complexidade dos equipamentos técnicos e das máquinas tem exigido um maior nível de qualificação de funcionários nas industriais. A elevação dos custos e esforços exigidos para qualificar os técnicos tem levado os centros de treinamento das organizações a buscar novos métodos e ferramentas para realizar o treinamento com menores investimentos. Existem razões e exigências adicionais que pedem o uso de técnicas inovadoras de treinamento no domínio técnico, tais como [4]: • A necessidade de um sistema de treinamento que possa ser integrado ao ambiente de trabalho. • A necessidade de uma oferta de treinamento que possa ser oferecida globalmente e de acordo com a demanda. • A necessidade de um treinamento flexível que possa ALVES DE SOUSA et al.: MAINTENANCE AND ASSEMBLY ser oferecido em qualquer lugar e a qualquer momento. • A necessidade da integração de aspectos pedagógicos e fatores humanos no ambiente de treinamento para auxiliar o usuário final no alcance dos efeitos e resultados de aprendizados pretendidos. Segundo estudos apontados por Boud, et al. [6], a aquisição de habilidades é dividida em três estágios: estágio cognitivo, em que as pessoas aprendem os procedimentos e as propriedades básicas do objeto, estágio associativo, em que os procedimentos e o conhecimento dos objetos devem fazer parte da seqüência de ações, e por fim o estágio habilitado, neste as seqüências de ações são combinadas dentro de um padrão de atividades. A cada etapa, requer um nível decrescente de controle consciente. Uma das discussões do trabalho de Boud, é que as atividades realizadas por meios tradicionais são baseadas no estágio cognitivo, e a Realidade Virtual conduz o treinando aos demais estágios, portanto, oferecendo ao treinando estágios superiores de habilidade em relação ao treinamento convencional. Um outro importante estudo, referente a retenção de habilidade espacial sobre tarefas de montagens, realizado por Waller, et al. [7], conclui que a retenção de habilidades do treinando, é maior quando do uso da Realidade Virtual em comparação aos meios tradicionais, principalmente quando envolve um certo período de tempo após o treinamento. Nos últimos anos, a área de Manutenção e Treinamento industrial vem sendo objeto de estudo em diversos trabalhos envolvendo RV, por ter um grande potencial no setor de treinamento oferecendo um meio em que as exigências de treinamento e necessidade anteriormente mencionadas possam ser integradas em um único ambiente. Essa potencialidade da RV é motivada nas boas experiências da Educação em Engenharia [8] [9] visualização de ambientes virtuais complexos em CAD [10] [11], utilizações em processos de montagens [5] [12] [13] e aplicações de treinamento baseadas na abordagem de aprendizagem pela prática (learning by doing) [4] [14] [15] [16] [17] [18]. Esta abordagem engloba dois elementos chaves: A experiência própria possibilitada pela simulação do ambiente do mundo real (usando-se uma interface gráfica de usuário ou realidade virtual ou ambas), e o guia de treinamento proporcionado pelo ato de “seguir os passos” do instrutor. Durante as pesquisas, foram encontradas aplicações de RV voltadas para treinamento tanto imersivas quanto nãoimersivas. Apesar das aplicações imersivas oferecerem um alto nível de interatividade e realismo, entretanto, apresentam altos custos de hardware e software para sua implementação, limitando sua utilização em aplicações e sua popularidade. Além disso, a ergonomia da maioria dos dispositivos nãoconvencionais ainda é um grande problema para tornar a Realidade Virtual imersiva uma ferramenta largamente aceita entre usuários e pesquisadores [19]. Já o sistema de RV não imersivo, oferece uma solução mais viável que apresenta um ambiente virtual em um computador convencional, devido ao seu baixo custo e sua portabilidade 485 [19]. Pelo fato das empresas e indústrias trabalharem já algum tempo com computadores pessoais, os usuários comuns já estão familiarizados com dispositivos, tais como, monitor, teclado e mouse. Por essa razão, os engenheiros e técnicos sentem-se mais confortáveis com a utilização de sistemas de RV não imersiva em comparação aos sistemas imersivos. Atualmente, existem bons exemplos de aplicações não imersivas voltadas para área de manutenção e montagem industrial, tais como, o V-REALISM [15] e VDSS (Visualization Decision Support System) [16]. O primeiro, é um sistema orientado a objetos, que realiza treinamento de montagem às equipes de engenharia especializadas, com objetivo de fornecer aos engenheiros de manutenção uma visualização tridimensional e simulação das seqüências de desmontagem de forma eficazes em equipamentos e peças da manutenção. O segundo, apresenta um sistema de visualização de unidade geradora hidrelétrica, permitindo compreender estruturas físicas e monitoramento da condição, para a análise do diagnóstico dos componentes de uma UHE. III. ESTUDO DE UMA UHE USANDO TÉCNICAS DE RV NÃO IMERSIVA Para o estudo de caso, utilizaram-se as plantas de uma UHE da usina de Tucuruí. Situada na Região norte do Brasil na latitude 3º 50’ S e longitude 49º 30’ W no Rio Tocantins no Estado do Pará. A altitude é de aproximadamente 30m acima do nível do mar. A usina de Tucuruí tem uma potência instalada de 8.370 MW e possui 23 UHEs, é a segunda maior usina hidrelétrica brasileira e a quinta maior do mundo. Para a implementação do ambiente virtual de treinamento de manutenção na UHE, foi desenvolvida uma ferramenta chamada Unidade Geradora Virtual (UGV) baseada em técnicas de RV não imersiva que apresenta três cursos principais: o primeiro, o curso de componentes da UHE que tem como objetivo a visualização e estudo geral das seções constituintes de uma UHE, onde maiores detalhes poderão ser encontrados nas referências [20] [21], o segundo, curso de montagem, apresenta uma seqüência da montagem da UHE, seguindo a ordem real utilizada na usina de Tucurui, e o terceiro, o curso de manutenção, que é um treinamento baseado na aprendizagem learning by doing, oferece diferentes níveis de treinamento e avaliação aos técnicos. Os cursos de montagem e manutenção são os focos deste trabalho. As peças da UHE são formadas por modelos CAD, organizados em um grafo de cena hierárquico e tem como base de dados documentos no formato XML (eXtensible Markup Language). A Figura 1 mostra um diagrama da arquitetura do sistema UGV, formado pelos módulos de treinamento, interface, de carregamento e de usuário. 486 IEEE LATIN AMERICA TRANSACTIONS, VOL. 6, NO. 5, SEPTEMBER 2008 Figura 1. Diagrama da arquitetura do UGV. O principal módulo do sistema é o módulo de Treinamento, que gerencia todas as atividades dos demais módulos, sendo o intermediador das trocas de dados do sistema. O módulo de treinamento possui as regras de planejamento de montagem, executa as seqüências de montagem e desmontagem das peças, e por fim, realiza a avaliação de desempenho do treinando sobre os procedimentos. O módulo de carregamento recebe as solicitações do módulo de treinamento para alocar em memória as peças em CAD utilizando Loaders 3D. Esse mesmo módulo também carrega os arquivos de usuários e de peças, que estão armazenados em arquivos XML. Os arquivos de usuários contêm descrições como: nome de usuário, senha, avaliação, status da tarefa, e os arquivos de peças descrições dos modelos das peças como: nome da peça, dados físicos, posicionamento no ambiente, entre outros. O módulo de usuário é responsável pela administração dos dados referentes do treinando, registrando informações pessoais como nome e senha, e também informações de avaliação do módulo de treinamento, tais como, desempenho do treinando e o status de conclusão dos procedimentos de manutenção. O módulo de interface promove a interação entre o sistema e o treinando por meio de dois sub-módulos: o sub-módulo Renderizador, responsável pelo carregamento da cena virtual 3D juntamente com as peças da UHE, e o sub-módulo interação, responsável pela captação dos estímulos do usuário, seja pelo mouse ou teclado, e responde-los por meios textuais ou no ambiente virtual. Para descrever as funcionalidades do sistema, de forma geral, é utilizada a modelagem UML [22], por meio do diagrama de casos de uso, conforme a figura 2. O papel do ator do sistema é desempenhado pelo Treinando, representado pelo usuário que irá executar os procedimentos de treinamento. Quanto às funcionalidades de casos de uso, o Treinando poderá Manipular Ambiente Virtual como um todo, por meio de mouse e teclado, o usuário poderá movimentar peças e equipamentos, explorar e navegar na UHE virtual. Realizar treinamentos de acordo com seu interesse, que podem ser os cursos de Componentes da UHE, de Montagem e de Manutenção. Figura 2. Diagrama de caso de uso Para implementação da aplicação UGV, foi utilizado o ambiente de desenvolvimento e linguagem DELPHI e o componente Open Source GLScene [23]. GLScene é uma biblioteca baseada em OpenGL. O Hardware utilizado é PC com processador Intel Core 2 Duo 1.86 GHz com 2GB de memória e uma placa de vídeo QuadroFX 1100 (128Mb). II. NOVOS CURSOS DO SISTEMA UGV Os cursos de montagem e manutenção são objetos de estudo deste trabalho, que serão detalhados nos próximos tópicos. A. Curso de montagem. A figura 3a mostra a janela inicial do curso de montagem, que utiliza recursos de RV não imersiva para permitir que o treinando execute virtualmente os procedimentos de montagem do concreto e de peças da UHE, baseado nos manuais de montagem, fornecidos pela ELETRONORTE. No centro da tela está o Mundo Virtual, onde se vê o difusor, e a parte de concreto inicial, que está transparente. Inicia montagem Figura 3a. Interface do curso de montagem. Figura 3b. Concreto não transparente. A partir daí o processo se inicia, com a montagem de todas as partes de concreto ou peças mecânicas, através de uma animação, utilizando-se o primeiro botão à esquerda (o segundo botão é de pausa da animação), ou peça a peça através da interação do usuário. (terceiro e quarto botões). Existem 3 botões que controlam a transparência do concreto. A figura 3b, mostra a mesma imagem da figura 3a, onde o concreto não estar transparente. As figuras 4a a 4d mostram a montagem de alguns equipamentos e concretos. ALVES DE SOUSA et al.: MAINTENANCE AND ASSEMBLY Figura 4a. Montando as peças cotovelo e cone do tubo de sucção e concreto da camada 1. Figura 4b. Montando o concreto da base da caixa espiral. 487 equipamentos da UHE, baseado nos manuais de operação e manutenção da turbina fornecidos pela ELETRONORTE. A figura 7a mostra a tela do procedimento de manutenção da junta superior, localizada entre o prédistribuidor e a tampa superior da turbina, a manutenção consiste na desmontagem dos parafusos da prensa-junta, depois remover a prensa-junta, e por último a junta, a montagem ocorre no sentido inverso. A figura 7b mostra a manutenção da junta inferior localizada entre o prédistribuidor e a tampa inferior, o processo de desmontagem e montagem é semelhante a parte superior. Junta Prensa-junta Parafusos Figura 4c. Montando prédistribuidor. Figura 4d. Montando a caixa espiral e o concreto camada 03. As figuras 5a a 5d mostram uma seqüência real da descida de peças, a saber, 5a, rotor da turbina, 5b, tampa superior, 5c, eixo, em seguida vem o cone, que aparece na figura 5d que mostra a descida do rotor do gerador. Figura 5a. Descida do rotor da turbina. Figura 5b. Descida da tampa superior, logo após o rotor. Figura 5c. Descida do eixo. Figura 5d. Descida do rotor do gerador. Figura 7a. Área de manutenção da junta da tampa superior. Tampa inferior Figura 7b. Área de manutenção da junta da tampa inferior. As figuras a seguir referem-se a visualização do procedimento de manutenção da bucha do munhão superior das diretrizes, e para esta manutenção o sistema UGV oferece dois tipos de visualização, a primeira, visão superior externa do Cone (cor amarela), permitindo que o treinando visualize de fora do cone a retirada da tampa do piso do cone, e a partir da abertura da tampa do piso, o treinando possa manipular as peças da área de manutenção, conforme mostra a figura 8a. Já a figura 8b, exibe a visão lateral interna do treinando dentro do Cone. Local da manutenção As figuras 6a e 6b mostram a vista lateral da UHE após a montagem. Figura 8a. Área de manutenção da bucha do munhão superior. Figura 6a. Concreto transparente. Figura 6b. Concreto não transparente. B. Curso de manutenção. O ambiente de treinamento no UGV utiliza recursos de RV não imerviva para permitir que o treinando execute virtualmente os procedimentos de manutenção, realizando operações de desmontagem e montagem de peças e Figura 8b. Visão interna do Cone da manutenção da bucha superior. Seguindo as idéias de aprendizagem por etapas, de acordo com o nível de conhecimento do treinando, contido nos trabalhos de Bluemel, E. [1] [4], o curso possui três modos de treinamento: modos automático, guiado e exploratório, em que esses modos são acessados conforme o grau de conhecimento do treinando em relação aos procedimentos de manutenção. 1) Modo de manutenção automática Neste modo, é realizada animação automática dos passos de procedimento de manutenção como forma de orientação ao 488 IEEE LATIN AMERICA TRANSACTIONS, VOL. 6, NO. 5, SEPTEMBER 2008 treinando. Conforme o tipo de manutenção escolhido pelo treinando, a animação automática é executada, e as instruções dos procedimentos são exibidas na área de texto. A interação com ambiente virtual neste modo é a mínima possível. O procedimento de manutenção se desenvolve por meio de uma animação que mostra os movimentos de montagem e desmontagem das peças, sendo controlada pelo treinando. Este treinamento tem como objetivo apresentar as peças envolvidas na manutenção, demonstrar o posicionamento correto do técnico dentro da estrutura de UHE e a seqüência correta em que as peças devem ser manipuladas. As figuras 9a à 9f mostram um exemplo de animação do procedimento da manutenção de desmontagem da bucha do munhão superior das diretrizes. A figura 9a mostra o inicio do procedimento de desmontagem. Na parte inferior, na tela de texto, o sistema solicita ao usuário que clique no botão Animação para iniciar os procedimentos, e a imagem do centro da tela exibe a remoção do pino excêntrico (dentro do circulo vertical) e dos parafusos do grupo A (dentro do circulo horizontal). A figura 9b mostra a remoção dos parafusos do grupo B, as figura 9c e 9d mostram respectivamente, as retiradas do parafuso do eixo da manivela e da tampa da manivela, a figura 9e mostra a retirada do pino de ruptura e da biela, e por fim, a figura 9f, mostra a remoção da bucha. Para a montagem a animação percorre o caminho inverso, ou seja, inicia colocando a nova bucha e termina recolocando o pino excêntrico. Inicia animação Parafusos do grupo B Figura 9a. Inicio da animação da manutenção da bucha do munhão superior das diretrizes. Parafuso do eixo da manivela Figura 9c. Removendo o parafuso do eixo da manivela. Pino de ruptura Figura 9b. Remoção dos parafusos do grupo B. Tampa da manivela Figura 9d. Retirada da tampa da manivela. Diferente do modo automático, aqui o treinando deverá realizar as tarefas de manutenção manualmente usando mouse, permitindo a seleção e movimentação das peças através de eventos de picking (escolha virtual de objetos por meio de evento de click do mouse). Quando uma peça, que faz parte do contexto da manutenção, é clicada, uma mensagem informa o nome do objeto na cena, e simultaneamente é exibida na área de texto instruções relacionadas ao objeto, contendo passo-a-passo as tarefas, como mostra o exemplo da manutenção da junta da tampa superior da figura 10. Figura 10. Manutenção da junta da tampa inferior do pré-distribuidor. Quando uma peça é movimentada na seqüência correta é exibida uma mensagem positiva informando que a peça foi desmontada/montada com sucesso. Para tornar as características das peças virtuais semelhante ao mundo real, utiliza-se a propriedade de detecção de colisão, a fim de evitar que o usuário penetre com uma peça através de outra. Ao término da manutenção, é exibido na área de texto o resultado de avaliação do treinando, contendo informações do modo avaliado (1-Modo Automático, 2-Modo Guiado e 3Modo Exploratório), o treinamento avaliado (1-substituição da junta da tampa superior e 2-substituição da junta da tampa inferior), e o resultado da avaliação mostra a porcentagem de acerto durante os procedimentos de manutenção. Caso o treinamento tenha sido finalizado sem nenhum erro, o sistema habilita um botão para avançar para o próximo modo, e um botão “reiniciar”, caso o treinando queira repetir a tarefa como mostra a figura 11. Avança para próximo modo Reiniciar Bucha Resultado do treinamento Biela Figura 9e. Retirando o pino de ruptura e a Biela. Figura 9f. Retirada da bucha. 2) Modo de treinamento guiado Neste modo de treinamento, o sistema guia o usuário por comandos para realização dos procedimentos de manutenção. Figura 11. Escolha dos botões avançar e repetir ao término da manutenção. ALVES DE SOUSA et al.: MAINTENANCE AND ASSEMBLY 3) Modo de Treinamento Exploratório Ao iniciar este modo, o aprendiz já se sente familiarizado com os procedimentos de montagem e desmontagem, e a partir desse momento, os conhecimentos do treinando serão comprovados pela realização das tarefas sem nenhum auxílio por parte do sistema. Na figura 12, o treinando retira os parafusos, a prensa-junta e a junta, e os substitui usando o mouse. Ao final de cada passo executado corretamente, o sistema exibe uma mensagem no mundo virtual indicando sua realização que avisa que a retirada da junta superior foi concluída. 489 16 15 14 12 12 10 8 6 4 2 1 0 Bastante adequada Adequada Pouco adequada Figura 13. Adequação do sistema aos objetivos do treinamento. b) A qualidade realística das peças e equipamentos virtuais apresentados durante os treinamentos de montagem e manutenção atendem de maneira: (1-insatisfatória; 2-pouca satisfatória, onde boa parte das peças virtuais não são reconhecidas no mundo real; 3-satisfatório, mesmo algumas peças apresentando limitação realísticas; 4-bastante satisfatória) Figura 12. Retirada das peças de manutenção no modo exploratório. Na área de texto não é exibida nenhuma informação sobre o procedimento de manutenção, apenas mensagens relativas à seleção correta ou não das peças. Ao término da tarefa de manutenção do modo exploratório, o sistema informa que o treinamento foi concluído com sucesso, e com isso, o treinando estará apto a aprender outro procedimento, já que passou por todos os modos de treinamento relativo ao procedimento atual. III. AVALIAÇÃO DO SISTEMA Foi elaborado um questionário para avaliar as impressões dos usuários quanto a utilização do UGV. O questionário possui critérios objetivos que avaliam aspectos da qualidade da interface oferecida pelo sistema e a qualidade da experiência proporcionada ao treinamento. O processo de entrevista do questionário para a primeira avaliação do sistema foi feito em um grupo de 28 alunos do curso de Engenharia Elétrica do 7º semestre da Universidade Federal do Pará, da disciplina de sistema de energia, onde todos os integrantes possuem o conhecimento teórico de uma UHE. Após a avaliação do questionário, os resultados apontaram as seguintes situações: a) Adequação do sistema como todo aos objetivos do treinamento em montagem e manutenção de uma UHE, é considerada: (1-Inadequada; 2-pouco adequada; 3adequada; 4-bastante adequada) 30 25 25 20 15 10 3 5 0 Bastante satisfatória Satisfatória, mesmo algumas peças apresentando limitações realísticas Figura 14. Qualidade realística das peças e equipamentos virtuais. c) O grau de motivação oferecido no sistema para a realização dos procedimentos dos cursos de montagem e manutenção, é considerado: (1-não oferece motivação; 2oferece pouca motivação; 3-oferece uma motivação; 4oferece bastante motivação) 25 23 20 15 10 5 3 2 0 Oferece bastante motivação Oferece uma motivação limitada Oferece pouca motivação Figura 15. Grau de motivação. d) O nível de dificuldade para realizar procedimentos por meio de botões, navegação e manipulação dos objetos virtuais, é considerado (1-difícil; 2-pouco difícil; 3-fácil; 4muito fácil) 490 IEEE LATIN AMERICA TRANSACTIONS, VOL. 6, NO. 5, SEPTEMBER 2008 16 14 14 12 10 8 7 7 6 4 2 0 Muito fácil Fácil Pouco difícil Figura 16. O nível de dificuldade para realização de procedimentos. e) A interface do sistema como todo exige um nível de aprendizagem e habilidade, é considerada: (1-difícil; 2moderado; 3-fácil) 20 18 18 16 14 12 10 10 8 6 4 2 0 Fácil Moderado Figura 17. Nivel de aprendizagem da interface. f) Após o treinamento, pode-se considerar que o sistema UGV: (1-não acrescentou novos conhecimentos; 2-ofereceu apenas uma noção geral dos componentes de uma UHE;3ofereceu visão geral das estruturas de uma UHE, a compreensão da relação de espacial entre as peças; 4-o contido no item 3 e mais entendimento lógico das seqüências de montagem e desmontagem dos equipamentos) 20 18 16 14 12 10 8 6 4 2 0 18 8 2 Ofereceu apenas uma noção geral dos componentes de uma UHE Ofereceu uma visão O item anterior e mais o geral das estruturas de entendimento lógico das uma UHE, e a sequências de compreensão da montagem e relação espacial entre manutenção as peças Figura 18. Nível de conhecimento adquirido após o treinamento. De acordo com os resultados, observa-se que os usuários entrevistados consideram o sistema UGV adequado aos objetivos de treinamento. Quanto a qualidade de interface, é oferecido um nível realístico das peças virtuais bastante satisfatório. Quanto ao grau de engajamento do usuário em realizar as atividades pré-determinadas, o sistema é considerado bastante motivador. O nível de dificuldade para realizar as principais operações é considerado de fácil a muito fácil. O nível de aprendizagem necessário para que o usuário possa compreender a interface e buscar saídas para novas situações, é considerado de moderado a fácil. E após o treinamento, a grande maioria dos entrevistados considerou que o sistema ofereceu novos conhecimentos sobre montagem e manutenção, apresentou as principais estruturas da UHE, dentro de uma relação espacial coerente, e o entendimento das operações de montagem e manutenção. VI. CONSIDERAÇÕES FINAIS Este artigo apresenta a concepção e o projeto de um sistema de realidade virtual voltado para o treinamento através dos cursos de montagem e manutenção das peças de uma UHE. O sistema adota uma arquitetura modular, o que o torna expansível e flexível. O sistema de montagem, oferece ao treinando uma visualização e compreensão dos procedimentos de montagem das peças em geral, e o curso de manutenção apresenta ao treinando os procedimentos de manutenção, de forma que este aumente gradativamente o seu envolvimento com o sistema. Em comparação à arquitetura do sistema proposto por Li, J. e Khoo [15], L., o UGV também possui cursos de treinamento, de representação do ambiente virtual e de interface gráfica. Sendo que, além de conter um repositório de modelos de peças em CAD, o UGV também possui um repositório de documentos XML contendo informações referentes aos modelos CAD e aos procedimentos de treinamento. Comparando à solução VDSS, proposto por Guo, J. [16], a ferramenta UGV oferece além da visualização tridimensional, um componente especifico para treinamento e avaliação. Quanto às propriedades que auxiliam o processo de simulação de montagem e desmontagem virtual, relatados no trabalho de Sá [5], o curso de manutenção do UGV atende importantes características, tais como, execuções de treinamento envolvendo movimentações de peças virtuais baseadas na física real, contendo propriedades de detecção de colisão. Portanto, a ferramenta UGV está em consonância com as tecnologias apresentadas, permitindo que técnicos especializados adquiram um bom conhecimento das operações de manutenção durante o treinamento, que antes se limitavam a extensivos documentos e aulas teóricas, e com isso, oferecendo maior qualidade na geração de energia e na diminuição dos riscos gerados por erros humanos. Segundo as pesquisas realizadas com os alunos de engenharia, o sistema apresentou bons resultados quanto a adequação do sistema ao objetivo de montagem e manutenção, boa qualidade de interface e ofereceu novos ganhos de conhecimento quanto aos cursos oferecidos. A primeira versão do protótipo foi finalizada e implantada na Usina de Tucuruí, onde tem sido testada por seu corpo ALVES DE SOUSA et al.: MAINTENANCE AND ASSEMBLY técnico, e tem obtido boa aceitação. A próxima fase do projeto do UGV consiste na implantação do sistema ao programa de treinamento de equipes de técnicos da Eletronorte, e em seqüência, realizar uma nova avaliação mais apurada do sistema junto a essas equipes. REFERÊNCIAS Bluemel, E., Hintze, A., et al., “Virtual environments for the training of maintenance and service tasks. 2003”. Proceedings of the 2003 Winter Simulation Conference , vol.2. The Fairmont New Orleans, p. 2001-2007, 2003. [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] G. Burdea and P. Coiffet, “Virtual Reality Technology”. Second Edition, John Willey & Sons, 2003. CREAGER W.P E JUSTIN J. D. Hydroelectric Handbook. John Wiley & Sons, Inc. New York, 1962. Schenk, M.; Blumel, E.; et al. “Technology Enhanced Training at Workplace: A Virtual Reality Based Training System for the Technical Domain. In: 1st International Conference on EBusiness and E-Learning Proceedings, ISBN 9957-8585-0-5, p. 57-62, 2005. Sá, A.; Zachmann , G. “Virtual reality as a tool for verification of assembly and maintenance processes”. Computer & Graphics Journal, Vol. 23 No. 3, p. 389-403, 1999. Boud, A. C. , Haniff, D. J., Baber, C. and Steiner, S. J. “Virtual Reality and Augmented Reality as a Training Tool for Assembly Tasks”. Proceedings International Conference on Information Visualization IV, p. 32 –36, 1999. Waller, D. and Miller, J. “A desktop virtual environment trainer provides superior retention of a spatial assembly skill”. Proceedings of the Conference on CHI 98 summary: human factors in computing systems, p. 339-342, 1998. RIBEIRO FILHO, Manoel. ; SOUSA, Marcos Paulo Alves de; PATRICIO, Eder Torres ; SILVA, Orlando Fonseca . Experimento de Controle Colaborativo em Ambiente Virtual Tridimensional. In: Simpósio Brasileiro de Informática na Educação, 2004, Manaus. Simpósio Brasileiro de Informática na Educação, v. 1, 2004. Pantelidis, V. “Virtual Reality and Engineering Education”. Computer Applications in Engineering Education, Vol. 5 No.1, p.3-12, John Wiley & Sons,1997. Corseuil, E. T. L., Raposo, A. B. et al. : “ENVIRON – Visualization of CAD Models In a Virtual Reality Environment. In Eurographics Symposium on Virtual Environments (EG-VE)”. pp. 79-82, 2004. Bierbaum, A. “VR Juggler: A Virtual Platform for Virtual Reality Application Development”, Master Thesis, Iowa State University, 2000. Ye, P; Banerjee, A Banerjee, et al. “A comparative study of assembly planning in traditional and virtual environments”. IEEE Transactions on System, Man, and Cybernetics--Part C: Applications and Reviews, Vol. 29 No. 4, p. 546-555, 1999. Jayaram, S.; Wang, Y. and Jayaram, U. “A virtual assembly design environment”, Proceedings of IEEE Conference on Virtual Reality, pp. 172-179, 1999. Lin, F., Ye, L., et al., “Developing virtual environments for industrial training”, Information Sciences—Informatics and Computer Science: An International Journal, Vol.140 No.1, p.153-170, 2002. Li, J.R., L. P. Khoo and S. B. Tor. “Desktop virtual reality for maintenance training: an object oriented prototype system (VREALISM)”. Computers in Industry, Vol. 52 No.2, p. 109-125, 2003. Guo, J., et al. “Visualization of a Hydro-Electric Generating Unit And Its Applications”. Systems, Man and Cybernetics, 2003 IEEE International Conference. Vol. 3, p. 2354-2359, 2003. Arroyo, E.; Arcos, J. “SRV: a virtual reality application to electrical substations operation training”. IEEE International Conference on Multimedia Computing and Systems, Vol. 1, p. 835-839, 1999. Tam, E.; Badra, F.; et al. A Web-based virtual environment for operator training [for power systems]. IEEE Transactions on Power Systems, Vol. 14 No.3, 802-808, 1999. 491 [18] Wang, Q.; Li, J. “A desktop VR prototype for industrial training applications”. Virtual Reality, Vol. 7 No3-4, pp. 187-197,Springer, 2004.. [19] PAMPLONA, Alcides; RIBEIRO, Manoel Filho; SOUSA, Marcos; BARATA, Pebertli; NASCIMENTO, Messias; HOUNSELL, Marcelo. “Um sistema de Realidade Virtual para Treinamento de Manutenção e Estudo de uma Unidade Hidrelétrica de Energia”. XII Congreso Argentino de Ciencias de la Computación, CACIC 2006, 2006. [20] PAMPLONA, Alcides; RIBEIRO, Manoel Filho; SOUSA, Marcos; BARATA, Pebertli; NASCIMENTO, Messias; HOUNSELL, Marcelo. “A Virtual Reality System for Hydroelectric Generating Unit Maintenance Training and Understanding” ISCA 19th International Conference on Computer Applications in Industry and Engineering (CAINE-2006). Imperial Palace Hotel, Las Vegas, Nevada, USA, 2006. [21] G. Booch, J. Rumbaugh, and I. Jacobson, "The Unified Modelling Language User Guide", Addison-Wesley, 1999. [22] GLSCENE OPENGL SOLUTION FOR DELPHI. Disponível em : <http://glscene.sourceforge.net/index.php>. [23] J. B. Duran, "New Tendencies in Maintenance in the Electric Industry", IEEE LATIN AMERICA TRANSACTIONS, Vol. 1, No. 1, pp. 21-26, Oct. 2003. Marcos Paulo Alves de Sousa nascido em 1979, graduou-se em Ciência da Computação pelo Centro Superior de Ensino do Pará (CESUPA), Belém, PABrasil. Recebeu o título de Mestre em Engenharia Elétrica em 2004, pela Universidade Federal do Pará, Belém, PA-Brasil. Atualmente está cursando o doutorado em engenharia elétrica na Universidade Federal do Pará, desde março de 2004, onde realiza pesquisas na área de Realidade Virtual. É professor adjunto do Curso de Bacharelado em Sistemas de Informação do Centro Universitário do Pará (CESUPA), e atua como Superintendente da área de Segurança da Tecnologia da Informação no Banco do Estado do Pará (Banpará). Alcides Renato da Silva Pamplona Junior nascido em 1970, graduou-se em Engenharia Elétrica em pela Universidade Federal do Pará (1995), especialista em Análise de Sistemas pela Universidade Federal do Pará (2001), mestre em Engenharia Elétrica com ênfase em computação aplicada em Realidade Virtual pela Universidade Federal do Pará (2006). Atualmente trabalha como Analista de Sistemas do Tribunal Regional Eleitoral e cursa o doutorado em engenharia elétrica na Universidade Federal do Pará, desde março de 2007, onde realiza pesquisas na área de Realidade Virtual. Manoel Ribeiro Filho nascido em 1956, possui graduação em Engenharia Elétrica pela Universidade Federal do Pará (1979) , mestrado em Engenharia Elétrica pela Universidade Federal do Pará (1991) e doutorado em Engenharia Elétrica pela Universidade Federal do Pará (2002) . Atualmente é Professor Associado I da Universidade Federal do Pará. Tem experiência na área de Ciência da Computação, com ênfase em Computação Gráfica e Realidade Virtual. Atuando principalmente nos seguintes temas: Realidade Virtual aplicada a Indústria, Laboratórios Virtuais e Jogos Eletrônicos Educacionais. Felipe Vaz dos Reis nascido em 1984, graduou-se em Engenharia da Computação em fevereiro de 2007 na Universidade Federal do Pará. Atualmente, cursa o mestrado em engenharia elétrica, ênfase em computação aplicada, na Universidade Federal do Pará, Departamento de Engenharia Elétrica e da Computação, onde realiza pesquisas na área de Realidade Virtual e desenvolvimento de Jogos eletrônicos educacionais.
Baixar