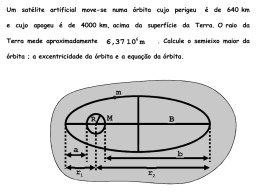
Aula 05 – Mecânica Celeste • Expressão introduzida pro Pierre Simon de Laplace (1749-1827) em seu célebre livro Mécanique Celeste (1799-1828) (vide BCE) • O conjunto de teorias que contêm todas os resultados da gravitação universal sobre o equilíbrio e o movimento dos corpos sólidos e fluidos, que compõem o Sistema Solar e os sistemas semelhantes distribuídos na imensidão do cosmos, forma a MECÂNICA CELESTE. • Origens da Mecânica Celeste de Laplace: 1. Philosophiae Naturalis Principia Mathematica (1687) de Isaac Newton. No qual formulou as leis do movimento e a lei da gravitação universal, deduzindo assim algumas da mais significativas propriedades do movimento planetário e de satélites. 2. O sistema Heliocêntrico de Nicolau Copérnico, as observações e experimentos de Galileu, o trabalho meticuloso de Tycho Brahe e finalmente o trabalho de Johannes Kepler. LEIS DE KEPLER • Lei das órbitas elípticas (1609): Os planetas se movem em elipses focadas no Sol. ∴Supondo-se que a massa do Sol M seja muito maior que a massa do planeta m. O Sol ocupa o foco F das Elipses, que como o outro foco (foco vazio) está a uma distância a do centro. Pe – Periélio (posição mais próxima do Sol) Af – Afélio (posição mais afastada do Sol) E – Excentricidade a – semi-eixo maior da elipse CÔNICAS • Lei das áreas (1609): Uma linha que liga um planeta ao Sol varre áreas iguais em tempos iguais. Para variar áreas iguais em tempos iguais os planetas se movem com velocidade angular constante, isto é, o momento angular L é constante. A taxa instantânea com que a área está sendo varrida é, então: dA 1 2 dθ 1 2 = r = r ω dt 2 dt 2 Onde ω é a velocidade angular. O momentum angular L do planeta em relação ao Sol é dado por: L = rp⊥ Onde p⊥ é a componente perpendicular do Momentum Linear do planeta: p ⊥ = mv ⊥ L = rp ⊥ = rmv⊥ = rm(ωr ) L = mr 2ω Portanto dA L = dt m dA = cte E como L e m são constantes: dt ** então a segunda lei de Kepler é equivalente a lei de conservação do Momentum Angular. • Lei Harmônica (1619): A relação entre os cubos dos eixos maiores das elipses e os quadrados dos períodos dos movimentos planetários é igual para todos os planetas. A comprovação desta última lei também pode ser feita a partir das leis de Newton. GRAVITAÇÃO UNIVERSAL F =G m1 m2 r2 Onde G = 6,67x10-11 Nm2/Kg2 e no caso de corpos não pontuais, utiliza-se o centro de massa do corpo. PROPRIEDADES: • Princípio da Superposição: n r r Fa = ∑ Fi i =1 • Variação da aceleração gravitacional para pequenos corpos situados na superfície da Terra F = ma g = G ag = G MT r2 mM T r2 Variação típica da aceleração gravitacional com a latitude na superfície da Terra. Há também a variação com o raio (visto que o núcleo é mais denso). Aplicando a 2a Lei de Newton para o planeta em órbita do Sol, teremos: M S mP 2 F =G m r = ω P r2 Como velocidade angular e freqüência angular possuem a mesma expressão: ω = 2πf = 2π T Temos: 2 M m 2π G S 2 P = mP r r T T 2 4π 2 = cte = 3 r GM S A LEI DE CONSERVAÇÃO DA ENERGIA Uma das grandes contribuições da mecânica Newtoniana para a Astronomia foram as leis de conservação do momentum e da energia. 1 2 = K m v p Energia cinética de um corpo em órbita: 2 Energia potencial gravitacional: U = µm P r Onde µ = G (M S + m P ) é a massa equivalente do sistema de 2 corpos constituído pelo Sol e pelo Planeta em órbita. Usando a Lei de conservação da energia total: ET = K + U = µm P 1 µ 1 = m p v 2 + = cte mP v 2 + r r 2 2 A EQUAÇÃO DE TRAJETÓRIA DO PLANETA r r r r = rm − rM Da segunda lei de Newton: Mm d 2r m 2 = −G 2 rˆ r dt d 2 r (t ) M µ & & ( ) G r t r r=0 = − ⇒ + dt 2 r3 r2 Equação diferencial cuja solução é dada por1: l2 1 r (t ) = ; µ (1 + e cosθ ) l = mrv ⊥ sen θ e = 1 + ET l µ 2m Onde e é a excentricidade, e θ é a outra componente do sistema (r,θ) de coordenadas. Esta é uma equação de uma cônica, em específico da elipse. O semi-eixo maior desta elipse é dado por: l2 a = p 1− e ; p = µm 2 2 Onde p é o parâmetro de órbita ou trajetória. ** Cometas e asteróides possuem órbitas elípticas de baixa excentricidade ou podem ter órbitas parabólicas. 1 Para detalhes de como resolver esta equação, vide Symon, Mechanics, cap. 3, partes 3.13 e 3.14. ELEMENTOS ORBITAIS CLÁSSICOS Cinco quantidades independentes chamadas de elementos orbitais são suficientes para descrever completamente a dimensão, a forma e a orientação de uma órbita. Um sexto é necessário para localizar o corpo, ao longo da trajetória, num dado instante. São eles: 1. 2. 3. 4. Semi-eixo maior (a) – define a dimensão da órbita Excentricidade (e) – define o tipo de órbita Inclinação (I) – ângulo entre o momento angular orbital e o versor k Longitude do nodo ascendente (Ω) – ângulo, no plano fundamental, entre o versor i e a direção do nodo ascendente; 5. Argumento de pericentro (ω) – ângulo, no plano da órbita, entre o nodo ascendente e a direção de pericentro. 6. Tempo de passagem pelo pericentro (T) – o instante em que o corpo se encontra no pericentro. Estes elementos são válidos tanto para órbitas heliocêntricas como órbitas geocêntricas. Outros dois termos, freqüentemente usados para descrever um movimento orbital são direto (para leste) e retrógrado (para oeste). SATÉLITES ARTIFICIAIS E TRAJETÓRIAS (exemplo de aplicação da mecânica celeste na Astronáutica) • Três tipos básicos de órbitas de satélites: de baixa altitude, de alta altitude e interplanetários. • Existem mais de 6.000 satélites, com várias funções: científica, militar, comunicações, meteorológico, navegacional e de recursos da Terra. • Os satélites estacionários ou síncronos estão a uma altura de aproximadamente 36.800Km, numa órbita circula equatorial. A manobra de transferência de órbita: • A forma mais simples de se inserir um satélite de alta altitude em sua órbita é colocá-lo numa órbita de baixa altitude e executar uma transferência de órbita, sendo a mais comum chamada de transferência de Hohmann. Considerando duas órbitas circulares co-planares, a transferência é feita através de uma órbita elíptica duplamente tangente, de semi-eixo maior dado por: 2a t = r1 + r2 E a energia será: ε t = − µ r1 + r2 Assim a velocidade de transferência e a velocidade na órbita 1 é respectivamente: v = 2 µ / r1 + ε t ; v1 = µ / r1 Assim a diferença de velocidade é: ∆v = v − v1 Com este acréscimo de velocidade o satélite passa de uma órbita menor para uma maior. (com decréscimo, ele passa de uma maior para uma menor).
Baixar