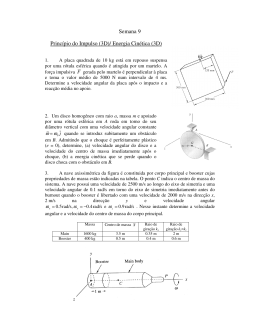
Dinâmica dos Sólidos – Prof. Cláudio S. Sartori Notas de aula 02 – 2° Bimestre Rotação em torno de eixo fixo Dinâmica do movimento plano: Resumo: TCM: Teorema do Centro de massa: Rext m aCM TMA: Teorema do momento angular: M Q IQ IQ P Q dm 2 Pólo Q pertence ao sólido: Pólo Q fixo (vQ = 0) ou pólo QCM TCM e TMA: F m aG iExt i M i M i GFi IG Ou OFi IO Equações de movimento: Rotação em torno de eixo fixo. F m a m r F m a m r M I 2 n Gn t Gt G G G G 1 Dinâmica dos Sólidos – Prof. Cláudio S. Sartori Notas de aula 02 – 2° Bimestre 1. (Beer Johnston 10a Ed. Pag. 1052) - Um fio é enrolado em torno de um disco de raio r homogêneo 0.5 m e de massa de 15 kg. Se o cabo é puxado para cima, com uma força de intensidade T = 180 N, determinar (a) a aceleração do centro do disco, (b) a aceleração angular do disco, (c), a aceleração do cabo. F ma i G m ay T P i m g ay 2. (Beer Johnston 10a Ed. Pag. 1053) - Uma esfera uniforme de massa m e raio r é projetada ao longo de uma superfície horizontal áspera com uma velocidade linear v0 e sem velocidade angular. Denotando por k o coeficiente de atrito cinético entre a esfera e o chão, determine (a) o tempo t1 em que a esfera vai começar a rolar sem deslizar, (b) a velocidade linear e a velocidade angular da esfera no tempo t1. TP 180 150 m ay ay 2 2 m 15 s ⤹ M F iExt i m aGx N a g m aG N P 0 N m g M O IG i G IG 2 IG m r 2 5 M O IG T R IG IG M R 15 0.52 IG I G 1.875kg m2 2 2 2 i T R 180 0.5 rad 48 2 ↻ IG 1.875 s aGx 0 aGy 2 2 F r m r 2 5 2 m g r m r 2 5 2 5 g g r 5 2 r m s2 Inicialmente v = = 0 aP aQ P Q P Q aA aG A G A G A esfera começará a rolar sem deslizar quando o ponto de contato dela com o solo possuir velocidade nula. vC 0 t 0 v v0 a A 2 ˆj 48 kˆ 0.5 iˆ 0 v t v0 a t aA 2 ˆj 24 kˆ iˆ aA 26 ˆj vG t v0 g t ˆj m aA ac 26 ˆj 2 s vC vG GC 0 vG iˆ kˆ r ˆj 0 vG iˆ r kˆ ˆj iˆ 2 Dinâmica dos Sólidos – Prof. Cláudio S. Sartori Notas de aula 02 – 2° Bimestre 0 iˆ vG iˆ r iˆ vG r v0 g t r t 0 t 5 g t 0 t 0 2 r 5 g t 2 r 5 g v0 g t t r 2 r 5 v0 g t g t 2 2v0 7 g t v0 t t1 2 7 g 3 t I0 k 2 Velocidade linear vG t v0 g t 2v0 vG t t1 v0 g 7 g 7v 2v0 2 vG t t1 v0 v0 vG t t1 0 7 7 5 vG t t1 v0 7 I0 k 2 m I0 k 2 k 18in k P g 18 ft ft g 32.3 2 12 s 2 18 322 I0 12 32.2 I0 22.5lb f s2 Tomando o centro de rotação O: M Velocidade angular: 5 g t t 2 r 5 g 2v0 t t1 2 r 7 g 5v t t1 0 7 r P g O IO i 12 24 T 400 22.5 12 12 800 T 22.5 A aceleração do bloco será: F iext m aG T P m a i 644 lb 3. (Meriam Kraige pag. 432) - O bloco de concreto de peso 644 lb é elevado pelo mecanismo mostrado de içar, onde os cabos estão firmemente enrolados em torno dos respectivos tambores. Os cilindros, que são mantidos juntos a girar como uma unidade única sobre o seu centro de massa, em O, têm um peso combinado de 322 lb e um raio de giração de cerca de 18 in. Se uma tensão constante de P = 400 lb é mantida pela unidade de potência em A, determinar a aceleração vertical do bloco e a força resultante sobre o rolamento em O. T 644 P 644 a T 644 a g 32.2 32.2 ft s2 12 a r a 12 Resolvendo: 800 T 22.5 T 644 644 a 32.2 20 800 T 22.5 800 T T 644 20 22.5 Dinâmica dos Sólidos – Prof. Cláudio S. Sartori Notas de aula 02 – 2° Bimestre 22.5T 22.5 644 20 T 20 800 22.5T 20T 22.5 644 20 800 42.5T 14490 16000 30490 T 717lb 42.5 800 T 800 717 22.5 22.5 rad ft 3.67 2 a 3.67 2 s s IO IG m d 2 50 I O 0.559 0.52 32.2 T Equilíbrio no centro da polia: F ix F iy Ox 400 cos 45 0 0 1.5527 IO 0.94719slug ft 2 M i IO 4 rad 50 0.5 0.94719 26.3938 2 s Fni m an Fni m 2 rG i i i Como = 0: (roda parte do repouso): Oy 822 717 400 sen450 0 On 0 i Ox 283lb Oy 1322lb Fti m at Fti m rG O Ox2 Oy2 O 1352lb 4. (Hibbeler 12a Ed. Cap. 17 pag. 428 ) - Uma roda desbalanceada de 50 lb possui um raio de giração kG = 0.6 ft sobre um eixo passando através de seu centro de massa G. Se a roda parte do repouso, determine as reações sobre seu pino O. OFi i i Ot 50 m rG Ot 50 1.5527 26.39 0.5 Ot 50 20.487 Ot 29.51lb 5. (Hibbeler 12a Ed. Cap. 17 pag. 429 ) - Uma barra de 20 kg num certo instante possui velocidade angular = 5 rad/s. Determinar as reações na conexão da barra em O e a aceleração angular. Use g = 9.81 m/s². Diagrama de corpo livre: Momento de Inércia: I G m kG2 I G P 2 kG g 50 lb 2 0.62 ft ft 32.2 2 s IG 0.559lb ft s2 IG 0.559slug ft 2 IG Fni m an Fni m 2 rG i i On m rG 2 On 20 52 1.5 On 750N Fti m at Fti m rG Teorema de Steiner ou dos eixos paralelos: i i Dinâmica dos Sólidos – Prof. Cláudio S. Sartori Notas de aula 02 – 2° Bimestre Ot P m rG Ot P m rG 209.81 20 ↺ M F iG i 1.5 IG ml2 12 20 32 60 196.2 30 1.5 12 60 Ot 1.5 180 60 294.3 45 60 354.3 12 5 Equações de movimento para o tambor: Fxi m an Fxi m 2 rG i i Ox m rG 2 15 354.3 rad 5.905 2 60 s Ot 196.2 20 5.905 1.5 Ot 372.35N Fyi m a y Fyi m rG i i Oy P T m rG 177.15 Oy T P m rG Usando: M i FiO 609.81 IO 0.4 Oy T 588.6 24 IO IG m d 2 m l2 m l2 l IO m IO 12 3 2 ↺ M F 2 20 32 IO I O 60kg m 2 3 60 20 9.811.5 60 5.905 60 rad s2 6. (Hibbeler 12a Ed. Cap. 17 pag. 430 ) - O tambor mostrado possui massa de 60 kg e raio de giração k0= 0.25 m. Uma corda de massa desprezível é presa ao tambor e a uma massa de 20 kg. Se o bloco é abandonado, determine a aceleração angular do tambor. iO i IO Momento de inércia do tambor: IO m kO2 IO 60 0.252 IO 3.75kg m2 T r IO 0.4 T 0.4 3.75 T 3.75 Se a corda não se desliza sobre a polia, a aceleração tangencial da polia será a mesma do bloco: a rG Equação de movimento para o bloco: Fyi m a y Pb T m a i 20 9.81T 20 a 196.2 T 20 a a a rG 196.2 T 20 196.2 T 196.2 T 20 0.4 8 0.4 196.2 T 0.4 T T 3.75 8 3.75 196.2 T 3.75 8 0.4 T 196.2 3.75 3.75T 3.2 T 735.75 3.2 3.75 T T 735.75 T 105.86 N 6.95 Dinâmica dos Sólidos – Prof. Cláudio S. Sartori Notas de aula 02 – 2° Bimestre 0.4 0.4 T 105.86 3.75 3.75 11.29 rad m a rG a 4.51 2 s2 s 0.4 6. (Livro Unip pg. 78 3.10) - 3 hastes finas, homogêneas, cada qual com massa m e comprimento L foram utilizadas na construção de um triângulo, conforme ilustrado. Pede-se o momento de inércia em relação a um eixo ortogonal ao plano da figura e que passe pelo CM – Centro de massa. Potência transferida pela força resultante F: Pmotor F v Momento do motor: Mmotor F d Como v d Pmotor F d Pmotor Mmotor 6 Na frequência de regime: 2 f 2 3000 rad 314.16 60 s Pmotor M motor M motor L L M motor CM Pmotor 120 M motor 0.3819N m 314.16 TMA: M R Mmotor Mdiss ICM L I 3 I _ I _ I / I \ 1 l 3 ml2 I_ m 12 3 2 I CM 2 m l2 2 7. (Livro Unip pg. 83 3.11) - Um ventilador, ao ser ligado, parte do repouso com aceleração constante, e atinge frequência f = 3000 rpm em 5 s, com o motor gerando potência média Pm = 350 W. Para manter a frequência de regime de trabalho, o motor desenvolve potência constante Pmotor = 120 W. Considerar que o valor médio, do momento das forças dissipativas, nos movimentos acelerados, seja 75% daquele no movimento de regime de trabalho; pedem-se: (a) o momento das forças dissipativas, no regime de trabalho; (b) o momento de inércia do ventilador; (c) o tempo gasto até o ventilador parar, após ser desligado. No regime de trabalho, a velocidade angular é constante: = 0. Logo: Mmotor Mdiss 0 Mdiss Mmotor 0.382N m Considerando o movimento inicial, desde o repouso até a frequência de trabalho: 0 t 314.16 0 5 314.16 rad lig 62.832 2 5 s 2 t 0 t 2 2 62.832 5 0 5 785.4rad 2 Emotor Pmootor dt Emotor 350 t Emotor 1750 J 5 Energia dissipada: Ediss Pdiss dt Ediss M diss dt Ediss 0.382 0.75 dt Ediss 0.287 dt Ediss 0.287 785.38 Ediss 225.4J F d Potência resultante: PR M R Energia transferida ao sistema armazenada na forma de energia cinética: Ec PR dt EC M R dt Ec I dt Ec I d dt Ec Id dt e Dinâmica dos Sólidos – Prof. Cláudio S. Sartori Notas de aula 02 – 2° Bimestre I 2 I 314.162 Ec Ec 49348.2 I 2 2 Pela conservação da energia: Ec EC Em Ediss 49348.2 I 1750 225.4 I 1524.6 I 0.031kg m2 49348.25 CM Pelo TMA, com o motor desligado: M R I 0.287 0 0.031 0.287 rad 9.26 2 0.031 s 0 t 0 314.16 9.26 t 314.16 t t 33.93s 9.26 8. (Livro Unip pg. 67 3.01) - Duas esferas de massas m1 = 0.010 kg e m2 = 0,03 kg estão localizadas nas extremidades de uma haste de peso desprezível, com comprimento L = 0,10 m. Determinar o momento de inércia (em kg.m2): (a) em relação a um eixo vertical passando pelo ponto médio da haste. (b) em relação a um eixo paralelo do item anterior que passa pelo centro de massa do conjunto. 7 0.075 ICM 0.01 0.0752 0.03 0.0252 ICM 7.5105 kg m2 9. (Livro Unip pg. 83 3.04) - Um balão esférico de raio R é constituído por uma película fina e homogênea de massa m. Considerando um eixo radial, pedem-se: (a) o momento de inércia; (b) o raio de giração. (a) L2 L2 m2 2 2 2 IO 0.01 0.05 0.03 0.052 I O m1 IO 1104 kg m2 (b) Somas Massa (kg) m1 = 0.01 m2 = 0.03 mi 0.04 x (m) 0 0.1 2 ICM m R2 (Esfera oca) 3 (a) (b) ICM 2 m R2 m k 2 k 2 R 3 3 y x 0.025 10. (Livro Unip pg. 83 3.11) - Uma barra homogênea ilustrada a seguir, de massa m e comprimento L, está articulada pela extremidade A, girando em um plano vertical, sob ação de um momento M. No instante ilustrado a velocidade angular é = 8 rad/s; para esse instante, determine: (a) a aceleração angular da barra (em rad/s2). (b) as componentes da reação na articulação. Dados: m = 40 kg; L=6 m M = +120 N.m g = 10 m/s2 mi.xi (kg.m) 0 0.003 mi xi 0.003 m1 x1 m2 x2 m1 m2 0.01 0 0.03 0.1 xCM 0.01 0.03 0.003 xCM xCM 0.075m 0.04 y ax H x xCM ay V P TCM.: Teorema do centro de massa: F xi i F yi m ax H m ax m a y V P m a y i TMA: Teorema do momento angular: Dinâmica dos Sólidos – Prof. Cláudio S. Sartori Notas de aula 02 – 2° Bimestre M FiO T1 R T2 R IO IO i T1 T2 R 6 120 400 IO 2 2 m l2 l m 12 2 2 T1 T2 R 40 6 I O 480kg m2 3 6 120 400 480 2 rad ↻ s2 m s2 L2 m a y r a y 2.25 3 a y 6.75 2 s L2 ax 2 r ax 82 3 ax 192 0.36 T1 T2 V 400 40 6.75 V 400 270 270 V 130N T2 i TCM.: Teorema do centro de massa: P T m1 a m1 a1 1 1 T2 P2 m`2 a TMA: Teorema do momento angular: M i FiO IO 200 5 T2 440 N T1 3 6 440 3 T 2800 N 1 6 18 200 5 155.56 x yi 2 8 146.67 y F 2 a a T1 T2 8 T2 5 T2 200 240 T1 mp T1 T2 200 T1 20 4 T 120 12 T1 T2 2 4 200 T1 5 T1 5 T2 T2 120 3 T1 3 T2 6 T1 5 T2 200 4 T2 3 T1 120 H 40 192 H 7680 N 11. (Livro Unip pg. 107 3.29) - Os blocos ilustrados a seguir têm massas m1 e m2. A massa da polia é mp e seu raio é R. Desprezar a massa da corda e admitir que não há escorregamento entre a corda e a polia. Considere a aceleração da gravidade local igual a 10 m/s2. A aceleração do bloco de massa m1 vale aproximadamente, em m/s2: Dados: m1 = 20 kg m2 = 12 kg M = 8 kg R = 0.3 m 8 mp R 2 2 200 T1 20 a T2 120 12 a mp R2 a T1 T2 R 2 R 2 1080 480 2.25 a1 a2 R ml2 ml2 m l2 IO IO 12 4 3 IO 2 O=G ; P1 = m1.g = 200N P2 = m2.g = 120N Como a corda não escorrega: O=A ; P = m.g = 400N Teorema dos eixos paralelos: I O I CM m OG I O mp R 2 T1 T2 155.56 146.67 a 4 4 T1 T2 155.56 146.67 a a 4 4 m a 2.22 2 s a 12. (Livro Unip pg. 91 3.14) - Um disco uniforme, com eixo fixo, possui raio R = 0,4 m e massa m = 6 kg. Em repouso, o disco é acionado pea força F = 20 N, através de uma corda enrolada no mesmo. O atrito nos mancais, gera um binário (momento) resistente Mres = 1.5 N.m. Pedem-se: Dinâmica dos Sólidos – Prof. Cláudio S. Sartori Notas de aula 02 – 2° Bimestre (a) a reação do eixo fixo. (b) o número de voltas necessária para que o disco atinja a velocidade angular de = 40 rad/s. ⤹ M G 0 PB 0.152 22.2 0.254 0 PB 37.1N A polia girará no sentido antihorário. 9 TCM.: Teorema do centro de massa: H m ax 0 V P F m ay 0 H 0 V 60 20 0 V 80 N TMA: Teorema do momento angular: M FiO IO Cinemática do movimento: aA rA aB rB aA 0.254 aB 0.152 FRB mB aB PB TB TB PB mB aB TB 44.5 4.536 0.152 i PB g F R MRes ICM m R2 20 0.4 1.5 2 6 0.42 6.5 rad 8 1.5 2 0.48 s 2 0.48 13.54 F2 02 2 402 0 2 13.54 TB 44.5 0.6895 FRA mA aA TA PA TA mA aA PA TA 2.2629 0.254 22.2 PA g TA 0.5748 22.2 Equações de movimento: momento de inércia da polia: 1600 rad 27.08 59.08 59.08 n n n 9.4 2 2 13. (Beer Johnston 5 Ed. 16.5 Pag. 551) – Uma polia pesando 53.4 N e raio de giração 0.203 m está unida a dois blocos como ilustrado. Supondo-se que não exista atrito no eixo, determinar a aceleração angular da polia e a aceleração de cada cilindro. 0.254 m 0.152 m I mk2 I I P 2 k g 53.4 0.2032 I 0.224kg m2 9.81 ⤹ M G IG TB 0.152 TA 0.254 IG 44.5 0.6895 0.152 0.5748 22.2 0.254 0.224 6.764 0.1048 0.146 5.6368 0.224 1.1272 0.2508 0.224 1.1272 rad 0.2508 0.224 1.1272 0.4748 s 2 2.37 44.5 N 22.2 N Sentido do movimento: Para manter a polia em equilíbrio: rad 2.37 2 ↺ s Dinâmica dos Sólidos – Prof. Cláudio S. Sartori Notas de aula 02 – 2° Bimestre m s2 m aB 0.152 2.37 aB 0.360 2 s a A 0.254 2.37 a A 0.602 14. (Hibbeler pag.442 17.13) – Determine a aceleraçãoangular da polia da figuram que possui uma massa de 8 kg e raio de giração kG = 0.35 m. A massa da corda é negligenciável. 21.52 19.76 rad 10.32 2 4 s m aG 5.16 2 s 15. (Livro Unip pg. 109 3.32) - A figura ilustra uma barra AB, homogênea , de massa m = 20 kg e comprimento L = 0.5 m. Na posição definida pelo ângulo = 600, a mesma apresenta velocidade angular = 4 rad/s. Pede-se a aceleração angular da barra. A s CM L/2 L/2 Equações de movimento: momento de inércia da polia: N n̂ I m k I 8 0.35 2 2 G tˆ A=O 0.98 kg m2 ⤹ M B IG CM L/2 T T 0.5 100 0.2 0.98 P.cos L/2 B P i 100 T 78.48 8 aG P m g Para que a polia não escorregue em A: aG r aG 0.5 21.52 T 8 0.5 21.52 T 4 21.52 T T 0.5 20 0.98 4 4 T 0.5 20 0.98 21.52 T 2 T 80 21.0896 0.98T 58.91 T T 19.76N 2.98 TCM: Teorema do centro de massa: Fni N P sen m an i Fti P cos T m at i L an 2 rG rG 2 L at rG rG 2 Fyi m a 8 9.81 P.sen TMA: Teorema do Momento Angular M Fi IO i O L IO IG m 2 IO 2 m L2 m L2 m L2 IO 12 4 3 2 L m L P cos 2 3 L m L2 3 g cos 2 3 2 L 3 10 cos 600 rad 15 2 2 0.5 s m g cos Calcule os valores de N e T agora, carinha.... 10 Dinâmica dos Sólidos – Prof. Cláudio S. Sartori Notas de aula 02 – 2° Bimestre aT M L 3 g cos aT 2 4 an 2 i FiO IO Fat 0.125 IG N 0.125 I G 0.05 N 0.052 L 2 0.4 16. (Livro Unip pg. 109 3.33) - O disco de raio r = 0.125 m e massa m = 4 kg, momento de inércia baricêntrico ICM = 0.052 kg.m², inicialmente em repouso, é colocado em contato com a esteira, que move-se com velocidade constante, para a direita, v = 3 m/s. O coeficiente de atrito entre a esteira e o disco é = 0.40, pedem-se: (a) determinar a aceleração angular do disco durante o escorregamento; (b) o ângulo total de rotação do disco, desde o repouso, até que o escorregamento do disco e a esteira cesse. 0.052 N 1.04 F cos14.04 1.04 0 0.97 0.4 0.245 F 1.04 40 0 0.97 F 0.416 0 0.245 F 1.04 40 0.97 F 0.416 2.32 0.245 F 1.04 2.32 F 40 11 rad 2.332 F 35 2 s 40 N 0.245 F 2.425 F 40 F 2.6578 15.05 N 1.04 35 N 36.3N O escorregamento cessa quando velocidades das superfícies forem iguais: as vBordaDisco vesteira final r 3 3 rad final 0.125 3 final 0.125 s Diagrama de corpo livre: 24 F 2 inicial 2 242 2 35 P N F Fat 0.5 75.96 0.125 90 90 75.96 14.04 arctg 2 final 8.23 17. (Livro Unip pg. 102 3.20) - O sistema de polias duplas tem momento de inércia total ICM = 20.3 kg.m², raio interno Ri = 0.23 m e raio externo Re = 0.40 m, respectivamente; inicialmente em repouso,é acionado por um contrapeso de massa m = 65 kg. Pedem-se: (a) a aceleração angular do sistema; (b) a velocidade angular no instante t = 3 s; (c) a velocidade angular no instante em que o contrapeso deslocou-se de 0.3 m. TCM: Teorema do centro de massa: (disco) Fxi F cos14.04 Fat m aGx i Fyi F cos 75.96 N P m aGy i F cos14.04 Fat 0 0.245 F N 40 0 TMA: Teorema do Momento Angular 576 rad 70 Diagrama de corpo livre: Dinâmica dos Sólidos – Prof. Cláudio S. Sartori Notas de aula 02 – 2° Bimestre (b) as componentes horizontal e vertical da reação do eixo. 12 T Pp P R2 R1 mB TCM: Teorema do centro de massa: Contra Peso F yi P T m aG i V TMA: Teorema do Momento Angular M Fi IO i O H 20.3 T R 20.3 T R aT R TB P T m aG 6510 F 20.3 R 65 PP TB R1 R 20.3 650 65 0.23 0.23 650 88.26 14.95 650 rad 6.3 2 88.26 14.95 s 0 t rad 0 6.3 3 18.9 s 2 2 0 2 s s R R 0.3 1.3rad 0.23 2 0 2 6.31.3 16.43 rad 4.05 s 18. (Livro Unip pg. 94 3.16) - A polia dupla ilustrada tem raios R1 = 0.6 m e R2 = 1.2 m, massa mP = 600 kg, raio de giração k = 0.9 m, e é acionada através de uma corda que faz um ângulo = 60° com a horizontal, com tração F = 3600 N. O movimento da polia, suspende o bloco de massa mB = 300 kg. Considerar que as cordas não escorreguem em relação à polia e g = 10 m/s². Pedem-se: (a) a aceleração do bloco; H V F R2 mB PB TCM: Teorema do centro de massa: Polia: F xi H F cos mP aPx i H 3600 cos60 0 H 1800N Fyi V PP TB F sen mP aPy i V 6000 TB 3600 sen60 0 V 9117.69 TB F yi Peso B: TB PB mB aB i TB 3000 300 aB TB 3000 300 aB Como não há escorregamento: aB R1 aB 0.6 TB 3000 300 0.6 TB 3000 180 TMA: Teorema do Momento Angular M Fi IO i O F R2 TB R1 mP k 2 3600 1.2 TB 0.6 600 0.92 486 4320 TB 0.6 486 4320 TB 0.6 486 4320 3000 180 0.6 486 Dinâmica dos Sólidos – Prof. Cláudio S. Sartori Notas de aula 02 – 2° Bimestre 4320 1800 108 486 2520 2520 108 486 594 rad 4.24 2 s aB 0.6 aB 2.544 T1 T2 R M R2 a 2 R 50 M T1 T2 a 2 100 10 a 200 20 a 25 a 100 10 a 200 20 a 25 a m s2 30 a 100 25 a a TB 3000 180 TB 3763.2 N 4.24 V 9117.69 TB V 12880.89 N 3763.2 18. http://adm.online.unip.br/frmConsultaExercicio.aspx Os blocos ilustrados a seguir têm massas m1 e m2. A massa da polia é M e seu raio é R. Desprezar a massa da corda e admitir que não há escorregamento entre a corda e a polia. Considere a aceleração da gravidade local igual a 10 m/s2. A aceleração do bloco de massa m1 vale aproximadamente, em m/s2: 1.82 100 m a 1.82 2 55 s 19. http://adm.online.unip.br/frmConsultaExercicio.aspx Uma polia dupla, composta por dois discos solidários entre si, possui momento de inércia total ICM = 0,30 kg.m2, é acionada a partir do repouso, por blocos de massas m1 = 1,5 kg, m2 = 2,5 kg, raios R1 = 0,4 m e R2 = 0,7 m, ligados a fios ideais que não escorregam em relação a polia. Desprezar atritos, adotar g = 10 m/s2. A tração no fio que sustenta a massa m2, expressa em N, é aproximadamente: 25.35 Dados: m1 = 10 kg m2 = 20 kg M = 50 kg R = 0,5 m Sentido de giro: P1 R2 P2 R1 0 P1 TCM: Teorema do centro de massa: massa m1 F 1i T1 P1 m1 a1 P1 0.7 25 P1 43.75N 15N horário 0.4 TCM: Teorema do centro de massa: massa m1 i T1 100 10 a1 T1 100 10 a1 F 2i massa m2 R1 P2 R2 F 1i T1 P1 m1 a1 a1 R2 i T1 15 15 0.7 T1 15 1.05 P2 T2 m2 a2 i 200 T2 20 a2 T2 200 20 a2 massa m2 F2i P2 T2 m2 a2 a2 R1 i TMA: Teorema do Momento Angular M Fi IO O i Polia: 25 T2 2.5 R1 T2 25 1 0.4 TMA: Teorema do Momento Angular M Fi IO O i Polia: a1 a2 T1 T2 P2 P1 T1 R T2 R I T1 T2 R M R2 2 T1 R2 T2 R1 I G T1 0.7 T2 0.4 0.3 15 1.05 0.7 25 1 0.4 0.3 10.5 0.735 10 0.4 0.3 0.735 0.4 0.3 10 10.5 1.435 0.5 0.5 rad 0.3484 2 1.435 s T2 25 1 T2 25 1 0.3483 13 Dinâmica dos Sólidos – Prof. Cláudio S. Sartori Notas de aula 02 – 2° Bimestre vA vB A rA B rB aTA aTB A rA B rB T2 25.3483N 20. (Livro Unip pg. 89 3.13) - Duas engrenagens A e B, possuem eixos fixos paralelos, conforme ilustrado. Soldada coaxialmente ‘a engrenagem A, uma polia de raio 0.05m é acionada pela força F = 500 N, através de um fio enrolado na mesma. As engrenagens A e B, possuem, respectivamente, rA = 0.3 m e rB = 0.1 m; os momentos de inércia da engrenagem A e da polia soldada é IA = 1.2 kg.m2; o momento de inércia da polia B é IB = 0.8 kg.m2. Os atritos são desprezíveis. Pedem-se: (a) a aceleração angular da engrenagem A; (b) a aceleração angular da engrenagem B; (c) a força que a engrenagem A aplica na engrenagem B. rA 0.3 A B A B 3 A rB 0.1 f 8 B f 24 A 24 A 0.3 25 1.2 A 7.2 A 25 1.2 A 25 7.2 A 1.2 A 25 8.4 A 25 rad A A 2.97 2 8.4 s B B 3 A B 3 2.97 B 8.91 f 8 B f 71.28 N rad s2 8.91 F 21. (Livro Unip pg. 115 3.35) - A figura ilustra um cilindro homogêneo, de massa m = 5.0 kg, raio R = 0.33 m, que abandonado do repouso, apoiado em plano inclinado de ângulo = 30° com a horizontal, rola sem escorregar ao longo do mesmo. Pedem-se: (a) a aceleração do centro de massa; (b) o mínimo valor do coeficiente de atrito entre o cilindro e o plano inclinado. F f HB HA VA N N PA VB f PB y TCM: Teorema do centro de massa: Engrenagem A F xi F N f at H A N mA axA x i yi VA F f PA mA ayA P i Engrenagem B Fxi HB N mB axB 300 i F yi VB f PB mB ayB i TMA: Teorema do Momento Angular M Fi IO i O F xi i Engrenagem A: f rA F r I A A f 0.3 500 0.05 1.2 A f 0.3 25 1.2 A Engrenagem B: f rB I B B f 0.1 0.8 B f 0.8 B f 8 B 0.1 Ponto de engrenamento: TCM: Teorema do centro de massa: P sen300 f at m a m g 510 F yi 0.5 25 fat 5 a N P cos300 0 i N P cos 300 N 50 cos 300 43.3 N TMA: Teorema do Momento Angular 14 Dinâmica dos Sólidos – Prof. Cláudio S. Sartori Notas de aula 02 – 2° Bimestre M i FiO IO K N m a K W m a a K g 9.66 ft / s 2 Cilindro: f R F m R2 2 yi m R a aT R 2 m R f a R 2 m R a ma f f 2 R 2 f 25 m a 5 a 5 a 25 5 a 2 2 25 5 2.5 a 25 7.5 a a 25 m a 3.333 2 7.5 s a R a R 3.333 rad 10.1 2 0.33 s m a 5 3.333 f f f 8.3325N 2 2 fat N f 8.3325 at 0.19 N 43.3 22. Um aro de 10 lb ou um anel fino é dada uma velocidade angular inicial 0 = 6 rad/s quando é colocado sobre a superfície. Se o coeficiente de atrito cinético entre o aro e a superfície é k = 0.3 determinar a distância que o aro se desloca antes de parar o escorregamento. Dados: g = 32.2 ft/s2; 1 in = 1/12 ft I = m r2 TCM: Teorema do centro de massa: F xi i Fat m aG N W 0 N W i TMA: Teorema do Momento Angular M Fi IO i O Aro: Fat r m r 2 k m g r m r 2 g 0.3 32.2 k r 0.5 rad 19.32 2 s Quando parar o escorregamento: vG r aG t 0 t r t t 0 r aG r 6 0.5 t 0.1553s 9.66 19.32 0.5 0 t 6 19.32 0.1553 3 rad s 2 02 32 62 2 2 19.32 s r s 0.116 ft 23. (Livro Unip pg. 115 3.36) - A figura ilustra um carretel de massa 5 kg, raio de giração k = 0.09 m e raios R1 = 0.08 m e R2 = 0.16 m que é acionado por uma força F = 22.5 N, aplicada por uma corda enrolada no mesmo e que não escorrega. O carretel apoia-se em superfície horizontal, com coeficiente de atrito estático e cinético, respectivamente, e = 0.30 e c = 0.25. Pedem-se: (a) determinar se ocorre ou não escorregamento; (b) a aceleração angular do carretel. 15 Dinâmica dos Sólidos – Prof. Cláudio S. Sartori Notas de aula 02 – 2° Bimestre R2 F F R1 ` TCM: Teorema do centro de massa: Engrenagem A xi m aG F Fat m aG i F Supondo ausência de atrito: yi 22.5 Fat 5 aG N P 0 N P 50N i F R1 Fat R2 I O F xi 22.5 0.08 Fat 0.12 5 0.092 F R1 1.8 0.12 Fat 0.0405 Como não há escorregamento: o CIR é o ponto de contato do carretel com o solo: TCM: Teorema do centro de massa: Engrenagem A m aG 22.5 5 aG aG i 22.5 5 4.5m s 2 F yi N P 0 N P 50N i TMA: Teorema do Momento Angular M Fi IO O i aG R2 aG 0.12 22.5 Fat 5 aG 22.5 Fat 0.6 0.12 22.5 Fat 0.6 1.8 0.12 Fat 0.0405 22.5 0.12 1.8 0.6 0.12 0.0405 0.9 0.1125 Carretel: F R1 IG 22.5 0.08 5 0.092 1.8 0.0405 8 aP aG P G P G Onde P é o ponto de contato do carretel com o piso. Lembrando que = 0: aP 4.5 iˆ 44.4 kˆ R2 ˆj aP 4.5 iˆ R2 44.4 kˆ ˆj iˆ aP 4.5 iˆ 5.33 iˆ aP 9.83 iˆ Ou seja, o ponto P se desloca para a direita; a força de atrito apontará para a esquerda: R2 F F R1 N P rad s2 15 N 44.44 rad s 2 0.12 0.9 0.1125 22.5 Fat 0.6 8 Fat 22.5 4.8 Fat 17.7N Da cinemática dos sólidos: ` 16 O i R2 ` TMA: Teorema do Momento Angular M Fi IO Como 0 Fat e N 0.350 A força de atrito é maior que a máxima permitida; portanto, a hipótese que não escorrega é falsa; logo a relação aG R2 aG 0.12 não vale; Assim, teremos que calcular a força de 12.5 N atrito cinética: Fat e N 0.2550 10 22.5 12.5 5 aG aG 5 m 2 2 s 1.8 0.12 12.5 0.0405 0.3 0.405 rad 7.48 2 s Ou seja, o centro de massa está acelerando para direita com aceleração de 2 m/s2 e está girando no sentido horário. Dinâmica dos Sólidos – Prof. Cláudio S. Sartori Notas de aula 02 – 2° Bimestre 24. (Livro Unip pg. 115 3.37) - A figura ilustra um carretel de massa 5 kg, raio de giração k = 0.09 m e raios R1 = 0.08 m e R2 = 0.16 m que é acionado por uma força F = 20 N, aplicada por uma corda enrolada no mesmo e que não escorrega. O carretel apoia-se em superfície horizontal, com coeficiente de atrito estático e cinético, respectivamente, e = 0.30 e c = 0.20. Pedem-se: (a) a aceleração angular do carretel; (b) a aceleração do centro de massa. Da cinemática dos sólidos: aP aG P G P G Onde P é o ponto de contato do carretel com o piso. Lembrando que = 0: aP 0 39.51 kˆ R2 ˆj aP R2 39.51 kˆ ˆj iˆ 0.12 m aP 6.32 iˆ 2 s Ou seja, o ponto P se desloca para a direita; a força de atrito apontará para a esquerda: F R2 F ` R1 F R2 N P R1 ` Supondo ausência de atrito: F xi i TCM: Teorema do centro de massa: Carretel: m aG Fat m aG Fat 5 aG F F N P 0 N 30N yi F i R2 TMA: Teorema do Momento Angular M Fi IO i F R1 Fat R2 IO R1 P ` 20 0.08 Fat 0.16 5 0.092 1.6 0.16 Fat 0.0405 Hipótese 1: não há escorregamento: N Como a força F é menor que o peso, CM não se desloca na vertical; como, adotando a força de atrito Fat nula e = 0, não tendo forças na horizontal, teremos: TCM: Teorema do centro de massa: F xi m aG aG 0 i Fyi F N P 0 N 30N i 20 O aG R2 aG 0.16 1.6 0.16 Fat 0.0405 1.6 0.128 0.04 5016 1.6 rad 9.52 2 0.128 0.04 s 0.168 Fat 5 aG Fat 0.8 Fat 7.61N 9.52 0.16 Para não haver escorregamento: 50 9N TMA: Teorema do Momento Angular M Fi IO i 0 Fat e N 0.330 O Carretel: F R1 IG 20 0.08 5 0.092 1.6 0.0405 39.51rad s 2 Como 7.61 FatE e N 9 A força de atrito é menor que a máxima permitida; portanto, a hipótese que não escorrega é 17 Dinâmica dos Sólidos – Prof. Cláudio S. Sartori Notas de aula 02 – 2° Bimestre verdadeira; logo aG R2 aG 0.16 a relação vale; Assim: 9.52 Carretel: F R1 IG 20 0.08 6 0.132 1.6 0.1014 rad s2 15.78rad s 2 m aG 0.16 9.52 aG 1.52 2 s Da cinemática dos sólidos: 25. (Livro Unip pg. 134 3.50) - A figura ilustra um carretel de massa 6 kg, raio de giração k = 0.13 m e raios R1 = 0.08 m e R2 = 0.16 m que é acionado por uma força F = 20 N, aplicada por uma corda enrolada no mesmo e que não escorrega. O carretel apoia-se em superfície horizontal, com coeficiente de atrito estático e cinético, respectivamente, e = 0.20 e c = 0.15. Pedem-se: (a) determinar se ocorre ou não escorregamento; (b) a aceleração angular do carretel. (c) a aceleração do centro de massacarretel. aP aG P G P G Onde P é o ponto de contato do carretel com o piso. Lembrando que = 0: aP 3.33 iˆ 15.78 kˆ R2 ˆj aP 3.33 iˆ R2 15.78 kˆ ˆj iˆ 0.16 aP 3.33 iˆ 2.52 iˆ aP 5.85 iˆ Ou seja, o ponto P se desloca para a direita; a força de atrito apontará para a esquerda: R2 ` F R1 F N P R2 ` F F R1 TCM: Teorema do centro de massa: Engrenagem A xi m aG F Fat m aG i F yi Supondo ausência de atrito: 20 Fat 6 aG N P 0 N P 60N i TMA: Teorema do Momento Angular M Fi IO i F R1 Fat R2 I O R2 20 0.08 Fat 0.16 6 0.132 F R1 ` O 1.6 0.16 Fat 0.1014 Hipótese: se não houver escorregamento: 12 N TCM: Teorema do centro de massa: Engrenagem A F yi 2 N P 0 N P 60N i TMA: Teorema do Momento Angular M Fi IO i O 0.260 o CIR é o ponto de contato do carretel com o solo: 20 i Fxi m aG 20 6 aG aG 6 3.33m s 0 Fat e N aG R2 aG 0.16 20 Fat 6 aG 20 Fat 0.96 0.16 20 Fat 0.96 1.6 0.16 Fat 0.1014 18 Dinâmica dos Sólidos – Prof. Cláudio S. Sartori Notas de aula 02 – 2° Bimestre 20 0.16 1.6 0.96 0.16 0.1014 3.2 1.6 0.1536 0.1014 18.82 4.8 0.255 rad s2 20 Fat 0.96 18.82 Fat 20 18.1 Fat 1.9N Como 20 6 m aG 20 6 aG aG xi i 0 Fat e N 1.9 TCM: Teorema do centro de massa: Engrenagem A F 12 N F R1 ` 3.33m s 2 F 0.260 yi A força de atrito é menor que a máxima permitida; portanto, a hipótese que não escorrega é verdadeira; logo a relação: aG R2 aG 0.16 aG 3 TMA: Teorema do Momento Angular M Fi IO m s2 O i Carretel: F R1 IG 20 0.08 6 0.132 1.6 0.1014 Ou seja, o centro de massa está acelerando para direita com aceleração de 3 m/s2 e está girando no sentido horário. 26. (Livro Unip pg. 134 3.51) - A figura ilustra um carretel de massa 6 kg, raio de giração k = 0.13 m e raios R1 = 0.08 m e R2 = 0.16 m que é acionado por uma força F = 20 N, aplicada por uma corda enrolada no mesmo e que não escorrega. O carretel apoia-se em superfície horizontal, com coeficiente de atrito estático e cinético, respectivamente, e = 0.20 e c = 0.15. Pedem-se: (a) determinar se ocorre ou não escorregamento; (b) a aceleração angular do carretel. (c) a aceleração do centro de massacarretel. N P 0 N P 60N i 15.78rad s 2 Da cinemática dos sólidos: aP aG P G P G Onde P é o ponto de contato do carretel com o piso. Lembrando que = 0: aP 3.33 iˆ 15.78 kˆ R2 ˆj aP 3.33 iˆ R2 15.78 kˆ ˆj iˆ 0.16 aP 3.33 iˆ 2.52 iˆ aP 0.81 iˆ Ou seja, o ponto P se desloca para a direita; a força de atrito apontará para a esquerda: R2 ` F N P R2 TCM: Teorema do centro de massa: Engrenagem A F xi ` R1 F R1 m aG F Fat m aG i F F yi 20 Fat 6 aG N P 0 N P 60N i TMA: Teorema do Momento Angular M Fi IO i Supondo ausência de atrito: O F R1 Fat R2 I O 20 0.08 Fat 0.16 6 0.132 1.6 0.16 Fat 0.1014 R2 19 Dinâmica dos Sólidos – Prof. Cláudio S. Sartori Notas de aula 02 – 2° Bimestre Hipótese: se não houver escorregamento: 12 N 0 Fat e N 0.260 o CIR é o ponto de contato do carretel com o solo: aG R2 aG 0.16 20 Fat 6 aG 20 Fat 0.96 0.16 20 20 Fat 0.96 1.6 0.16 Fat 0.1014 20 0.16 1.6 0.96 0.16 0.1014 3.2 1.6 0.1536 0.1014 6.27 1.6 0.255 rad s2 20 Fat 0.96 6.27 Fat 20 6.02 Fat 13.98N 12 N Como 0 Fat e N 0.260 A força de atrito é maior que a máxima permitida; portanto, a hipótese que não escorrega é falsa; logo a relação: aG R2 não é valida. Assim, haverá escorregamento e: Fat c N Fat 0.15 60 Fat 9N 20 Fat 6 aG 9 1.6 0.16 Fat 0.1014 9 11 m aG aG 1.83 2 6 s 0.16 1.58 rad 0.1014 s2 Ou seja, o centro de massa está acelerando para direita com aceleração de 1.83 m/s2 e está girando no sentido horário com aceleração angular 1.58 rad/s2. Movimento combinado de rotação e translação: Relações envolvendo energia. Dinâmica dos Sólidos – Prof. Cláudio S. Sartori Notas de aula 02 – 2° Bimestre Todo movimento de um corpo rígido pode ser sempre dividido em um movimento de translação do centro de massa e outro de rotação em torno do centro de massa. A energia cinética do corpo possui duas parcelas: uma devida à translação do centro de massa e outra devida à rotação: K 1 1 2 M vcm I cm 2 2 2 Condição para deslizamento: vCM R rolamento sem Exemplo 1 – Enrolamento de uma casca cilíndrica. Uma casca cilíndrica oca de raio R e massa M rola sem deslizar com uma velocidade vCM ao longo de uma superfície plana. Qual a sua energia cinética? Solução: K 1 1 2 M vcm I cm 2 2 2 1 1 v 2 K M vcm M R 2 CM 2 2 R 2 2 K M vcm Exemplo 2 – Velocidade de um ioiô. Um ioiô é feito enrolando-se um fio diversas vezes em torno de um cilindro de massa M e raio R. Mantémse presa a extremidade enquanto o cilindro é liberado sem velocidade inicial. O fio se desenrola, mas não desliza nem se dilata à medida que o cilindro cai e gira. Use considerações de energia para achar a velocidade do centro de massa vCM do cilindro sólido depois que ele caiu a uma distância h. Solução: 1 1 2 M vcm I cm 2 2 2 vCM 1 I M R2 R 2 K 1 1 1 v 2 K 2 M vcm M R 2 CM 2 2 2 R 3 2 K2 M vcm 4 Aplicando a conservação da energia: K1 U1 K2 U2 3 2 0 M g h M vcm 0 4 2 21 Dinâmica dos Sólidos – Prof. Cláudio S. Sartori Notas de aula 02 – 2° Bimestre vcm 4 g h 3 Exemplo 3 – Competição entre corpos girando. Em uma demosntração durante a aula de física, o professor faz uma “competição” de vários corpos rígidos redondos, deixando-os rolar do alto de um plano inclinado. Qual a forma do corpo que alcança primeiro a parte inferior? 22 Solução: A equação para o movimento de translação do centro de massa é: F y M g T M acm O momento de inércia em relação a um eixo que passa pelo centro de massa: I Solução: K1 0 U1 M g h U2 0 1 1 2 K2 M vcm I cm 2 2 2 K1 U1 K2 U2 1 1 2 0 M g h M vcm I cm 2 0 2 2 Somente a força de tensão possui torque em relação a um eixo que passa pelo centro de massa é: T R I cm 1 T R M R2 2 Como o fio se desenrola sem se deslizar: vCM R Chamando de: aCM R Icm c M R2 1 1 v 2 M g h M vcm c M R 2 cm 2 2 R 1 M R2 2 2 1 1 2 2 M g h M vcm M vcm c 2 2 1 2 gh 2 M g h M vcm 1 c vcm 2 1 c Todos os cilindros sólidos possuem a mesma velocidade no ponto inferior do plano, mesmo quando possuem massas e raios diferentes, pois eles possuem o mesmo valor da constante c. Todas as esferas sólidas possuem a mesma velocidade na base do plano. Quando menor o valor de c maior a velocidade do corpo quando ele chega na parte inferior do plano. Observando a tabela de momento de inércia, vemos que a ordem de chegada do plano é: Qualquer esfera maciça, qualquer cilindro maciço, qualquer esfera oca com parede fina ou casca esférica e, finalmente, qualquer casca cilíndrica. Exemplo 4 – Aceleração de um ioiô. Ache a aceleração de cima para baixo do ioiô e a tensão no fio. aCM R 1 M R 2 acm 1 T M acm 2 M g T M acm 1 M g M acm M acm 2 1 M g M acm M acm 2 3 2 M g M acm acm g 2 3 1 T M acm 2 1 2 T M g 2 3 2 T M g 3 T Exemplo 5 – Aceleração de uma esfera rolando. Uma esfera de bliche sólida rola sem Dinâmica dos Sólidos – Prof. Cláudio S. Sartori Notas de aula 02 – 2° Bimestre deslizar para baixo de uma rampa ao longo de uma guia. O ângulo de inclinação da rampa em relação à horizontal é . Qual é a aceleração da bola? Considere a bola uma esfera homogênea sólida, desprezando seus orifícios. Trabalho e potência no movimento de rotação Podemos escrever: dW Ftan ds ds R d dW Ftan R d dW d 2 W d 23 1 Podemos desenvolver: dW d dW I d dW I Solução: A figura mostra o diagrama de corpo livre, mostrando o sentido positivo das coordenadas. Usando o momento de inércia da esfera sólida: d d dt dW I d d d dt dW I 2 2 I M R2 5 W I d Equações de translação e rotação do centro de massa e chamando de f a força de atrito: 1 1 Wtot I 22 I 12 2 2 dW d dt dt P F x 1 M g sen f M acm f R I Como: cm 2 f R M R2 5 aCM R aCM R Substituindo, teremos: 2 f M acm 5 M g sen f M acm 2 M g sen M acm M acm 5 2 M g sen M acm M acm 5 7 5 M g sen M acm acm g sen 5 7 2 2 5 f M acm f M g sen 5 5 7 2 f M g sen 7 Coeficiente de atrito: 2 M g sen f 7 N M g cos 2 tg 7 Exemplo 6 – Um anúncio fazendo propaganda da potência desenvolvida pelo motor de um automóvel afirma que o motor desenvolve 1.49.105W para uma rotação de 6000 rpm. Qual é o torque desenvolvido pelo motor? Solução: P P 6000 f 6000rpm Hz 60 Dinâmica dos Sólidos – Prof. Cláudio S. Sartori Notas de aula 02 – 2° Bimestre f 100 Hz 2 f 2 100 200 rad s angular, que representamos por L . Definimos como: Lrp 1.49 105 200 24 237N m Exemplo 7 Um motor elétrico desenvolve um torque constante de = 10 N.m sobre o esmeril montado no seu eixo motor. O momento de inércia é I = 2.0 kg.m². Sabendo que o sistema começa a se mover a partir do repouso, calcule o trabalho realizado pelo motor em 8.0 s e a energia cinética no instante final. Qual a potência média desenvolvida pelo motor? Solução: I I 10 rad 2 2 s t rad 5 8 40 s 1 1 K I 2 K 2 402 K 1600 J 2 2 1 1 t 2 5 82 160rad 2 2 W W 10160 W 1600J W 1600 P P 200W t 8 A potência instantânea P = não é constante, porque cresce continuamente. Porém podemos P calcular o trabalho total por: t2 t2 W P dt W dt t1 t1 t2 8 W t dt 10 5 tdt t1 W 50 0 2 t 8 t 2 W 1600 J t 0 Momento angular e energia de rotação Lembremos que uma grandeza análoga ao momento linear p de uma partícula é o momento L m v r sen L m v l Pode-se mostrar que a taxa de variação do momento angular é igual ao torque da força resultante: dL dr dp pr dt dt dt dL dr mdv mv r dt dt dt dL v mv r ma dt 0 dL r F dt dL dt Dinâmica dos Sólidos – Prof. Cláudio S. Sartori Notas de aula 02 – 2° Bimestre 25 Para um corpo rígido de i partículas, o momento angular de cada uma será: Li mi vi ri Li mi ri i ri Li mi ri2 i L Li L mi ri 2 i L I Exemplo 1 – A hélice da turbina de um motor a jato possui momento de inércia 2.5 kg.m² em torno do eixo de rotação. Quando a turbina Dinâmica dos Sólidos – Prof. Cláudio S. Sartori Notas de aula 02 – 2° Bimestre começa a girar, sua velocidade angular em função do tempo é dada por 400 t 2 rad s3 (a) Calcule o momento angular da hélice em função do tempo e ache seu valor em t = 3.0 s. (b) Determine o torque resultante que atua sobre a hélice em função do tempo e calcule seu valor para t = 3.0 s. Ele está girando em torno de um eixo vertical completando uma volta a cada 2.0 s. Calcule a nova velocidade angular do professor quando ele aproxima os dois halteres do seu estômago e discuta como isso modifica a sua energia cinética. Seu momento de inércia (sem os halteres) é igual a 3.0 kg.m² quando seus braços estão distendidos para fora, diminuindo para 2.2 kg.m² quando suas mãos estão próximas do seu estômago. Os halteres estão inicialmente a uma distância de 1.0 m do eixo e a distância final é igual a 0.20 m. Considere o halteres como partículas. Solução: (a) L I L 2.5 400 t 2 I I prof Ihalteres L 1000 t 2 L t 3 1000 32 L 9000 kg m s I1 3 2 512 2 dL (b) 1000 2t dt 2000 t t 3 2000 3 6000 N m Solução Conservação do momento angular Princípio da conservação do momento angular: Esse princípio vale em todas escalas, desde o sistema atômico como o planetário e decorre da equação: dL dt dL Quando i 0 0 dt i Podemos escrever também: I1 1 I2 2 Exemplo 2 – Qualquer um pode ser bailarino. Um professor de física acrobata está de pé sobre o centro de uma mesa girante, mantendo seus braços estendidos horizontalmente com um haltere de 5.0 kg em cada mão. I1 13kg m2 I2 2.2 2 5 0.22 I2 2.6kg m2 f 1 1 rad f Hz 2 f T 2 s I1 1 I2 2 I 13 rad 2 1 1 2 2 5 I2 2.6 s I1 13 f1 f 2 0.5 f 2 2.5Hz I2 2.6 1 1 K1 I1 12 K1 13 2 K1 64J 2 2 f2 1 1 2 K2 I 2 22 K2 2.6 5 K1 320J 2 2 Exemplo 3 – A figura mostra 2 discos, um deles é o volante de um motor e o outro é um disco ligado a um eixo de transmissão. Seus momentos de inércia são IA e IB, respectivamente; inicialmente eles estão girando com a mesma velocidade angular A e B, respectivamente. A seguir empurramos os dois discos um contra o outro aplicando forças que atuam ao longo do eixo, de modo que sobre nenhum dos dois discos surge torque em relação ao eixo. Os discos permanecem unidos um contra o outro e 26 Dinâmica dos Sólidos – Prof. Cláudio S. Sartori Notas de aula 02 – 2° Bimestre atingem uma velocidade angular final . Deduza uma expressão para . Solução: O único torque que atua sobre cada disco é o torque que cada disco exerce sobre o outro disco; não existe nenhum torque externo. Logo o momento angular total do sistema dos dois discos é o mesmo antes e depois de eles serem unidos. No equilíbrio final eles giram juntos como se constituíssem um único corpo com momento de inércia: I I A IB A conservação do momento angular fornece: I A A I B B I I I A A B B I I A A I B B I A IB 1 1 I A A2 I B B2 2 2 1 1 K1 0.04 502 0.02 2002 2 2 K1 450J 1 K2 I A I B 2 2 1 K2 0.04 0.02 1002 2 K2 300J K1 Um terço da energia foi perdida na “colisão angular”, o análogo rotacional de uma colisão linear completamente inelástica. Não deveríamos esperar conservação da energia cinética, embora a força externa resultante e o torque resultante sejam nulos, porque existem forças internas não conservativas (forças de atrito) que atuam enquanti os dois discos começam a girar unidos e tendem a girar com uma velocidade angular comum. Exemplo 5 – Momento angular em uma ação policial. Uma porta de largura 1 m e massa de 15 kg é articulada com dobradiças em um dos lados de modo que possa girar sem atrito em torno de um eixo vertical. Ela inicialmente não está aberta. Um policial dá um tiro com uma bala de 10 g e velocidade de 400 m/s exatamente no canto da porta. Calcule a velocidade angular da porta imediatamente depois que a bala penetra na porta. A energia cinética se conserva? Exemplo 4 – No exemplo anterior, suponha que o volante A tenha massa de 2.0 kg, um raio de 0.20 m e uma velocidade angular inicial de 200 rad/s. Calcule a velocidade angular comum final depois que os discos ficam em contato. A energia cinética se conserva nesse processo? Solução: 1 1 I A mA rA2 I A 2 0.22 I A 0.040kg m2 2 2 Solução: 1 1 I B mB rB2 I B 4 0.12 I B 0.020kg m2 Considere um sistema formado pela porta 2 2 juntamente com a bala em seu interior. Não existe I A A I B B I A IB 0.04 50 0.02 200 0.04 0.02 rad 100 s nenhum torque externo em torno do eixo definido pelas dobradiças, de modo que o momento angular em torno desse eixo deve se conservar. O momento angular da bala é: L m v l L 0.01 400 0.5 L 2kg m2 s O momento angular final é: L I 27 Dinâmica dos Sólidos – Prof. Cláudio S. Sartori Notas de aula 02 – 2° Bimestre L 3.6 105 kg m2 s kˆ I I porta Ibala I mp d 2 L I 1 L m R 2 kˆ 2 1 L 1200 202 0.75 kˆ 2 L 1.8 105 kg m2 s kˆ mbala l 2 (c) 3 15 12 I 0.010 0.52 3 I 5.0025kg m2 mv L L I I 2 rad 0.40 5.0025 s A colisão entre a porta e a bala é inelástica porque forças não conservativas atuam durante o impacto da bala. Logo, não esperamos que haja conservação da energia cinética. Para conferirmos, calculamos a energia cinética inicial e final: Exemplo 7 - A máquina de Atwood tem dois corpos de massa m1 e m2 ( sendo m1 maior que m2), ligados por um cordel de massa desprezível que passa por uma polia cujos rolamentos não oferecem atrito. A polia é um disco uniforme, de massa M e raio R. O cordel não escorrega na polia. Determinar a aceleração angular da polia e a aceleração dos dois corpos pela equação: N 1 1 K1 m v2 K1 0.010 4002 2 2 K1 800J 1 K2 I 2 2 1 K2 5.0025 0.42 2 K2 0.40J i 1 i ,ext dL dt A energia cinética final é apenas 1/2000 da energia cinética inicial. Exemplo 6 - Determinar, em cada caso, o momento angular para as seguintes situações: (a) um carro de 1200 kg percorre no sentido anti-horário um círculo com 20 m de raio com velocidade de 15 m/s. (b) o carro mencionado desloca-se com velocidade v 15 m s iˆ sobre a reta y = y0 =20m, paralela ao eixo x. (c) um disco, no plano xy, com raio de 20 m e a massa de 1200 kg, girando a 0.75 rad/s em torno do seu eixo, que coincide com o eixo z. Solução: N dL dt i 1 Lz Lp L1 L2 i ,ext Lz I m1 v R m2 v R z,res m1 g R m2 g R dL z ,res Z ˆ dt (a) L r p L r m v k d 5 2 L 20 1200 15 kˆ L 3.6 10 kg m s mkˆ1 g R m2 g R I m1 v R m2 v R Solução: dt m1 g R m2 g R I m1 a R m2 a R (b) r x iˆ y ˆj r x iˆ y0 ˆj p m v p p iˆ L r p L x iˆ y0 ˆj p iˆ L y0 p kˆ m1 m2 g R 1 a M R2 m1 m2 a R 2 R 28 Dinâmica dos Sólidos – Prof. Cláudio S. Sartori Notas de aula 02 – 2° Bimestre a m1 m2 g 1 M m1 m2 2 Exemplo 8 – Um disco gira em torno de um eixo sem atrito, que coincide com o respectivo eixo de simetria, com velocidade angular inicial i, como mostra a figura. O seu momento de inércia em relação ao eixo é I1. Num certo instante, o disco cai sobre o outro, de momento de inércia I2, montado sobre o mesmo eixo. Graças ao atrito entre as duas superfícies em contato, os dois discos atingem uma velocidade angular comum aos dois, f. Calcular essa velocidade angular. Solução: A velocidade angular final está relacionada com a inicial pela conservação do momento angular: Lf Li I1 I 2 f f I1 i I1 i I1 I 2 Exemplo 9 – Um carrossel com 2 m de raio e 500 kg.m2 de momento de inércia gira em torno de seu eixo, sem atrito, completando uma volta a cada 5 s. Uma criança, com 25 kg, está inicialmente no centro do carrossel e depois caminha até a borda. Calcular a velocidade angular que terá, então, o carrossel. Solução: Pela conservação do momento angular: L f Li Isis, f f Isis,i i Isis Im Ic Im m r 2 I m m R2 f I m i f Im i I m m R2 500 i 500 25 22 5 f i 6 5 1 1 rev f f 6 5 6 s f Exemplo 10 – A criança mencionada no exemplo anterior corre com velocidade 2.5 m/s sobre uma tangente à beira da plataforma do carrossel, que está imóvel, e pula para a plataforma. Calcular a velocidade angular final da criança no carrossel. Solução: Momento angular inicial da criança correndo em relação ao centro da plataforma do carrossel: Li m v R Expressão do momento angular final do sistema criança-carrossel em termos da velocidade angular final f: Lf m r 2 Im f Igualando as expressões: m R Lf Li 2 Im f m v R mv R m R2 Im rad f 0.208 s f Exemplo 11 – Uma partícula de massa m descreve, com velocidade v0, um círculo de raio r0 sobre a superfície de uma mesa horizontal sem atrito. A partícula está presa a um fio que passa por um buraco na mesa, no centro do círculo. O fio é lentamente puxado para baixo, de modo que a partícula acaba descrevendo um círculo de raio rf. 29 Dinâmica dos Sólidos – Prof. Cláudio S. Sartori Notas de aula 02 – 2° Bimestre (a) Calcular a velocidade final em termos de r0, v0 e rf. (b) Calcular a tensão T no fio quando a partícula descreve um círculo de raio rf em termos de m, r e do momento angular L0 m v0 r0 . (c) Calcule o trabalho feito pela partícula pela tensão T, integrando T dr de r0 até rf. Dar a resposta em termos de r0, rf e L0. Solução: Achar a razão entre a energia final e a energia inicial do sistema. (a) A conservação do momento angular relaciona as velocidades final à inicial e os raios inicial e final: L f L0 m v f rf m v0 r0 v f (b) Como i v2 r m v f rf m v0 r0 L0 L v 0 mr 2 L0 v2 mr T m T m r r 2 L T 03 mr T m (c) O trabalho é: dW T dr dW Tr dr L20 m r3 rf L20 L20 dW dr W dr m r3 m r3 r0 L20 W 2 m r2 Ef L2f 2 I 2. Conservação do momento angular para relacionar Li a m, v e x: i Tr Solução: 1. Energia cinética depois da colisão em termos do momento angular Li e do momento de inércia I´do sistema bola-massa: r0 v0 rf F ma W 30 r rf r r0 L f Li L f Li m v x 3. O momento de inércia I´: 1 I m x2 M d 2 3 4. Ef As expressões de Lf e de I´na equação de Ef ficam: L2f 2 I Ef m v x 1 2 m x2 M d 2 3 2 2 2 3 m v x Ef 2 2 2 3m x M d 5. A razão entre a energia cinética depois da colisão e a energia inicial da bola de massa plástica é então: 3 m2 v2 x2 Ef 2 3m x 2 M d 2 1 Ei m v2 2 Ef 3m x2 Ei 3m x2 M d 2 L20 1 1 2 m rf2 r02 Exemplo 12 – Uma barra de massa M e comprimento d pode girar em torno de um eixo fixo a uma de suas extremidades. Uma bola de massa plástica, com massa m e velocidade v, atinge a barra a uma distância x do eixo e fica grudada na barra. 2 Exercícios de Revisão: Dinâmica dos Sólidos – Prof. Cláudio S. Sartori Notas de aula 02 – 2° Bimestre 1. O rotor de um motor elétrico tem uma freqüência de 3600 rpm , quando a carga e a energia são cortadas. O rotor de 50 kg , que tem um raio de giração do centro de gravidade de 180 mm , então começa a parar . Sabendo que a cinética de fricção devido ao atrito corresponde a um torque de magnitude 3,5 N ⋅ m exercida sobre o rotor , determinar o número de revoluções que o rotor executa antes de vir a parar. Solução: i 1 x yG Fi ,O 0.15 d d IO 0.3 G r GB B G 0.3 IO m kO2 IO 50 0.182 IO 1.62kg m2 3.5 1.62 2.16 f0 3600rpm 60Hz 32891.067 n 5234.77 2 2 2. B.J. Cap.16.54 - Uma barra em forma de L delgada uniforme ABC está em repouso em uma superfície horizontal quando uma força de magnitude P = 4 N é aplicada no ponto A. Desprezando o atrito entre o barra e a superfície e sabendo que a massa do conjunto de barras idênticas é de 2 kg , determine: (a) a aceleração angular inicial da barra; (b) a aceleração inicial do ponto B. A P rad s2 rad 0 2 60 0 376.991 s rad 0 2 60 0 376.991 s 2 02 2 02 2 2 2 2 0 376.991 32891.067rad 2 2.16 n j xG B L/2=0.15 n i z Posição do centro de massa: L 1 0 1 m1 x1 m2 x2 2 xG m1 m2 2 L xG xG 0.075m 4 m z m2 z2 zG 1 1 m1 m2 1 0.15 1 0 zG zG 0.075m 2 d xG2 yG2 d 0.0752 0.0752 d 0.106m Utilizando o Teorema de Steiner para as duas barras e somando: m m m m I G 2 L2 xG2 2 L2 zG2 12 2 12 2 2 2 2 2 I G 2 0.32 d 2 2 0.32 d 2 12 2 12 2 2 IG 2 0.0075 0.106 IG 0.037472kg m2 n i 1 Fi ,G TMA IG 0.3 0.037472 rad rad 8 2 8 j 2 s s 4 0.075 0.037472 31 Dinâmica dos Sólidos – Prof. Cláudio S. Sartori Notas de aula 02 – 2° Bimestre n F i 1 iz TCM: n n m az Fix m ax i 1 i 1 aB 2 k 8 j 0.075 i 0.075 k 0 IG T1 R2 T2 R1 IG T1 0.5 T2 0.2 0.9 4 k 2 a aGz 2 k aB aG r v Fi ,G TMA aB 2 k 0.6 k 0.6 i aB 2 k 0.6 k 0.6 i m aB 0.6 i 2.6 k 2 s 4. A polia dupla composta por duas polias de raios R1 = 0.20 m e R2 = 0.50 m, rigidamente soldadas entre si com eixo fixo, em relação ao qual o momento de inércia é I = 0.9 kg.m2. O acionamento da polia dupla é feito a partir do repouso, por blocos de massas m1 = 25 kg e m2 = 12 kg, ligados a fios ideais que não escorregam em relação a mesma. A aceleração linear do bloco 2, expressa em m/s2, é aproximadamente: 32 a1 R2 a 0.5 1 a2 R1 a2 0.2 250 T1 25 0.5 T 251 12.5 1 T2 120 12 0.2 T2 120 2.4 250 12.5 0.5 120 2.4 0.2 0.9 125 6.25 24 0.48 0.9 6.25 0.48 0.9 24 125 101 rad 7.63 101 13.23 2 7.63 s m a1 6.62 s 2 a1 0.5 13.23 a2 0.2 13.23 a 2.65 m 2 s2 T1 251 12.5 13.23 T1 85.63N T2 120 2.4 13.23 T2 151.75 N 5. A velocidade angular da polia dupla após 5 s, expressa em rad/s, é aproximadamente: 0 t 0 13.23 5 0 t 66.15 rad s 6. A velocidade do bloco 1 após 5 s, expressa em rad/s, é aproximadamente: v1 R2 v1 66.15 0.5 v1 33.075 n TCM: P1 T1 m1 a1 2 P2 m2 a2 F m a T i 1 i 250 T1 25 a1 T2 120 12 a2 7. Os blocos ilustrados a seguir têm massas m1 e m2. A massa da polia é M e seu raio é R. Desprezar a massa da corda e admitir que não há escorregamento entre a corda e a polia. Considere a aceleração da gravidade local igual a 10 m/s2. A aceleração do bloco de massa m1 vale aproximadamente, em m/s2: m s Dinâmica dos Sólidos – Prof. Cláudio S. Sartori Notas de aula 02 – 2° Bimestre 100 10 a 200 20 a 25 a 30 a 100 25 a a 100 m a 1.82 2 55 s 8. A haste delgada uniforme AB repousa sobre uma superfície horizontal sem atrito, e uma força de magnitude Q = 0.25 lb é aplicado a uma numa direção perpendicular à haste. Sabendo-se que a haste pesa 1.75 lb, determinar (a) a aceleração do ponto A, (b) a aceleração ponto B, (c) a localização do ponto em que a barra tem zero de aceleração. Dados: m1 = 10 kg m2 = 20 kg M = 50 kg R = 0.5 m TCM: Teorema do centro de massa: massa m1 F 1i T1 P1 m1 a1 i T1 100 10 a1 T1 100 10 a1 F 2i W m L2 W L2 m IG IG g 12 12 g massa m2 P2 T2 m2 a2 i 200 T2 20 a2 T2 200 20 a2 TMA: Teorema do Momento Angular M Fi IO O i W a g i Q g 0.25 1 a a g aG g W 1.75 7 TCM: F xi m aG Q Polia: aG a1 a2 T1 T2 P2 P1 T1 R T2 R I M R2 2 2 M R a T1 T2 R 2 R T1 T2 R TMA: i Q FiO IO L W L2 Qg 6 2 12 g W L 0.25 g 6g 6 1.75 L 7L 6g j 7L a A aG AG AG AG 50 M T1 T2 a 2 100 10 a 200 20 a 25 a M 1 g i 7 aA L k 2 1 L 6g g i k j 7 2 7L 33 Dinâmica dos Sólidos – Prof. Cláudio S. Sartori Notas de aula 02 – 2° Bimestre 1 3 g i g i 7 7 4 4 aA g i aA 32.2 i 7 7 aA m aA 18.4 i 2 s 34 aB aG BG BG L BG k 2 1 L 6g aB g i k j 7 2 7L 1 3 aB g i g i 7 7 2 2 aB g i aA 32.2 i 7 7 m aB 9.2 i 2 s aP aG PG PG 0 1 6g L g i zk j0 7 7L 2 1 6 gL g i zi 0 7 7 L 2 1 6 gL g z 0 7 7 L 2 6 gL 1 z g 7 L 2 7 L 1 L L z Lz 2 6 2 6 3L L 2L z z 6 6 3
Baixar