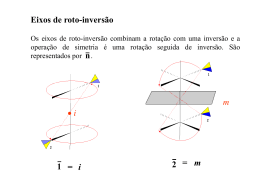
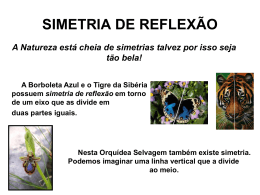
Simetrias do Plano e Grupos de Friso 1. Isometrias no Plano Transformação geométrica (em IR2) É uma aplicação bijectiva T, de IR2 em IR2, que a cada ponto faz corresponder um novo ponto. Isometria É uma transformação geométrica T, de IR2 em IR2, que preserva as distâncias, ou seja, tal que, se A e B são dois pontos quaisquer de IR2, se tem dist(T(A), T(B))=dist(A, B). Isometrias Translações Rotações Reflexões Reflexões deslizantes 1.1. Translação Translação definida por v É a transformação T de IR2 em IR2 tal que T(A)=A+v (figura 1). v A A=T(A) Figura 1 Translação inversa de T1 vector v Translação identidade I vector nulo A translação é uma isometria Prova: Se P e Q forem enviados em P e Q , respectivamente, então PP QQ . Se P, Q, P e Q forem colineares (figura 2a), PQ PQ QQ PQ PP PQ . Caso contrário, P P Q Q é um paralelogramo (figura 2b). Logo, PQ PQ . P P P Q P' Figura 2a Q' Q Q Figura 2b 1.2. Rotação. Simetria central Rotação de centro O e amplitude (figura 3) É uma transformação T de IR2 em IR2 A=T(A) tal que para A=T(A) verifica-se: OA OA O A Figura 3 o ângulo orientado OA, OA tem amplitude . A rotação inversa T 1 é a rotação de centro Oe amplitude . A t ransformação identidade é a rotação (de centro O) em que =0º (ou um múltiplo de 360º). Simetria central ou meia-volta A simetria de centro O é uma rotação de centro O e amplitude 180º. A simetria central é involutiva (T T=I) A rotação é uma isometria. Prova: Sejam P e Q enviados em P e Q , respectivamente, pela rotação de centro O e amplitude . Se O, P e Q forem colineares (figura 4a), atendendo à definição, PQ OQ OP OQ OP PQ . contrário (figura 4b), OP OP , POQ P OQ De OQ OQ e (POP QOQ ) . Logo, pelo critério LAL (de congruência de triângulos) conclui-se que POQ P OQ . Pelo que, PQ P Q . Q' P´ P' Q P O Figura 4a Q Q´ O P Figura 4b 1.3. Reflexão Reflexão (ou simetria axial) de eixo e 2 e 2 É a transformação T de IR em IR tal que, qualquer que seja o ponto A de IR2 A' A ( A e ), a mediatriz do segmento de recta AA, com A T(A), é a recta e (figura 5). Figura 5 A reflexão é involutiva (T T=I). T= T1 A reflexão é uma isometria. Prova: (uma ideia) Sejam P e Q dois pontos de IR2 e P e Q as suas imagens, respectivamente, por uma reflexão de eixo e. 1º Caso: P e Q estão do mesmo lado de e. 2º Caso: P e Q estão em lados opostos de e. 3º Caso: Só Pe (ou Pe e Qe). A prova assenta sobretudo na decomposição de PQ na soma ou diferença de comprimentos de segmentos de recta, que permitem obter essencialmente a definição de reflexão. PQ , usando Reflexão deslizante Dada uma reflexão R, de eixo e, e uma translação T de direcção paralela a e, chama-se reflexão deslizante à transformação S=T R de IR2 em IR2 (figura 6). e C B A'' B'' C'' A A' B' C' Figura 6. A reflexão deslizante S transforma ABC em AB C . S é a composta da reflexão de eixo e com a translação de vector BB . A inversa de S=T R é S1=R1 T1. A reflexão deslizante é uma isometria. Prova: Seja S=T R uma reflexão deslizante. Atendendo que T e R são isometrias tem-se: dist(S(A), S(B))=dist(T(R(A)), T(R(B))) =dist(R(A), R(B)) =dist(A, B). 1.5. Algumas propriedades das isometrias 1.5.1.Composta de duas translações C' C'' C B' B'' A' B A r A'' v r v 1 2 r r v +v 1 2 r r v1 + v2 , A translação T, de vector transforma ABC em ABC . T é a composta da r translação T2, de vector v 2 (que transforma ABC r em ABC ), com a translação T1, de vector v1 (que transforma ABC em ABC ). Figura 7. A composta de duas translações T1 e T2, de r r r r vectores v e v é uma translação T, de vector v + v . 1 2 1 2 Prova: Seja A um ponto qualquer do plano. Vamos r r mostrar que T(A)= A + v + v . 1 T(A)=(T2 T1)(A) =T2(T1(A)) r = T2(A + v ) 1 r r =(A + v ) + v 1 2 r r =A + v + v . 1 2 2 1.5.2.Composta de duas rotações com o mesmo centro A' B' A'' b B C' C C'' A B'' O R1(O; ) transforma ABC em ABC e a rotação R2(O; b) transforma ABC em ABC . A rotação R (O; +b) é a composta da R2 com R1, transformando ABC em ABC . Figura 8. A rotação A composta de duas rotações R1(O; ) e R2(O; b) é a rotação R(O; +b). Prova: Omitida (ver trabalho escrito). 1.5.2.Composta de duas reflexões e A'' e 1 A 2 C'' A' C C' B'' B' 2d d B Figura 9a. A composta de duas reflexões de eixos paralelos é uma translação. A reflexão R1, de eixo e1, transforma ABC em A B C e a reflexão R2, de eixo e2, transforma ABC em ABC . A translação T, de vector BB , é a composta da R2 com R1, transformando ABC em ABC . A composta da reflexão R2, de eixo e2, com a reflexão R1, de eixo e1, é uma translação de vector perpendicular aos eixos, se estes forem estritamente paralelos, sentido de e1 para e2 e norma igual ao dobro da distância entre os eixos. Prova. Omitida (ver trabalho escrito). e A' e 2 1 A'' A C C' B' B'' 2 B C'' O Figura 9b. A composta de duas reflexões de eixos concorrentes é uma rotação. A reflexão R1, de eixo e1 transforma ABC em ABC e a reflexão R2, de eixo e2, transforma ABC em AB C . A rotação R (O; 2 ) é a composta da R2 com R1, transformando ABC em AB C . A composta da reflexão R2, de eixo e2, com a reflexão R1, de eixo e1, é uma rotação de centro no ponto de intersecção dos eixos, se estes forem concorrentes, e amplitude igual ao dobro do ângulo dos eixos. Prova. Omitida (ver trabalho escrito). 2. Simetrias do Plano 2.1. Transformações de simetria Transformação de simetria (ou simplesmente simetria) de F (subconjunto de IR2 ou figura de IR2) É uma transformação T de IR2 em IR2 tal que T(F)=F. Significa que como subconjuntos de IR2 T(F) e F são iguais. Exemplos de figuras simétricas e Figura 1 A reflexão de eixo e deixa a figura 1 invariante. A figura tem uma simetria de reflexão. Figura 2 A rotação de amplitude 72º e centro no centro da figura deixa a figura 2 invariante. A figura 2 tem uma simetria de rotação. Exemplo de uma figura não simétrica Figura 3 A figura 3 não é simétrica. Não existe nenhuma transformação geométrica da identidade que a deixe invariante. 2.2. Grupo de simetria de F O conjunto das transformações de simetria de F é um grupo para a composição de transformações (grupo de simetria de F). Sejam T, R e S transformações de simetria de F. Então: T S transformação de simetria de F. T S(F)=T(S(F)) =T(F) =F. A composição é associativa ((T R) S)(F)= (T R)(S(F)) =T(R(S(F))) =T ((R S)(F)) Então, (T R) S=T (R S). T1 transformação de simetria. T1(F)=F (porque T(F) =F). I transformação de simetria. I(F)=F. Elementos do grupo de simetria da figura 1 j i l h g m f e Figura 1 8 reflexões (de eixos e, f, g, h, i, j, l, e m). 8 rotações em torno do centro da figura (de amplitudes 45º, 90º, 135º, 180º, 225º, 270º, 315º e 360º). Geradores do grupo: reflexão de eixo e e rotação de 45º ou reflexões de eixos e e f Elementos do grupo de simetria da figura 2 Figura 2 5 rotações (de 72º, 144º, 216º, 288º, e 360º em torno do centro da figura). Transformação geradora: rotação de 72º. 3. Frisos e grupos de friso Padrão Figura obtida pela repetição de outra - o motivo do padrão. Friso Padrão com simetrias de translação numa só direcção (com uma translação de módulo mínimo não nulo). Podem existir outras simetrias para além da de translação. Figura 1 Figura 3a. Motivo do padrão da figura 1. vr Figura 2 Figura 3b. Motivo do padrão da figura 2. Grupos de frisos Só existem sete grupos de friso (ou tipos de friso). Isto significa que ao associarmos a cada friso o seu grupo de simetria, apenas obteremos 7 grupos distintos. Prova: (no Livro Transformation Geometry de George Martin fazse a prova desta afirmação entre as páginas 78 e 81) Fluxograma de Washburn-Crowe para classificação de frisos Existe uma reflexão de eixo vertical? sim não Existe uma reflexão de eixo horizontal? Existe uma reflexão de eixo horizontal ou uma reflexão deslizante? não sim Existe uma meia-volta? sim não sim não Existe uma reflexão de eixo horizontal? sim não Existe uma meia-volta? sim não pmm2 pma2 pm11 p1m1 p1a1 p112 p111 (fig. 11) (fig. 10) (fig. 9) (fig. 8) (fig. 7) (fig. 6) (fig. 5) Friso p111 Figura 5. Friso com simetria de translação. 1 não tem nenhuma reflexão de eixo perpendicular à direcção de translação do friso. 1 não tem reflexão de eixo com a direcção da translação do friso nem reflexão deslizante de eixo (de reflexão) paralelo à direcção da translação do friso 1 não existe uma meia-volta Friso p112 Figura 6. Friso com simetria de meia-volta. 1 não tem nenhuma reflexão de eixo perpendicular à direcção de translação do friso. 1 não tem reflexão de eixo com a direcção da translação do friso. nem reflexão deslizante de eixo (de reflexão) paralelo à direcção da translação do friso 2 existe uma meia-volta Friso p1a1 Figura 7. Friso com simetria de reflexão deslizante. 1 não tem nenhuma reflexão de eixo perpendicular à direcção de translação do friso. a tem reflexão deslizante de eixo (de reflexão) paralelo à direcção da translação do friso. 1 não existe uma meia-volta. Friso p1m1 Figura 8. Friso com simetria de reflexão de eixo horizontal. 1 não tem nenhuma reflexão de eixo perpendicular à direcção de translação do friso. m tem reflexão cujo eixo tem a direcção da translação do friso. 1 não existe uma meia-volta. Friso pm11 Figura 9. Friso com simetria de reflexão de eixo vertical. m tem uma reflexão de eixo perpendicular à direcção de translação do friso. 1 não tem reflexão de eixo com a direcção da translação do friso. nem reflexão deslizante de eixo (da reflexão) paralelo à direcção da translação do friso. 1 não existe uma meia-volta. Friso pma2 Figura 10. Friso com simetrias de reflexão deslizante, meia volta e reflexão vertical. m tem uma reflexão de eixo perpendicular à direcção de translação do friso. a tem reflexão deslizante de eixo (da reflexão) paralelo à direcção da translação do friso. 2 existe uma meia-volta. Friso pmm2 Figura 11. Friso com simetrias de reflexões de eixos horizontal e vertical e meia volta. m tem uma reflexão de eixo perpendicular à direcção de translação do friso. m tem reflexão cujo eixo tem a direcção da translação do friso. 2 existe uma meia-volta. FIM (da 1ª parte) 4. Padrões Periódicos ou Papeis de Parede Definição Padrões periódicos ou papeis de parede são figuras planas caracterizadas por terem uma região fundamental (motivo) e duas translações linearmente independentes 17 Grupos de Simetria dos Padrões Periódicos Grupos Sem Rotações Grupo p1 Apenas estão presentes translações; É um grupo de translações. Grupo pm Além das duas translações presentes que formam um subgrupo de qualquer papel de parede, estão presentes reflexões. Grupo pg Além do subgrupo das translações estão presentes também as reflexões deslizantes. Grupo cm Grupo onde estão presentes as reflexões. Reflexões deslizantes onde o eixo não é das reflexões. Grupos Com Rotações de Grau 2 - 180 Graus Grupo p2 Rotações de 180 graus e translações. Grupo pgg Rotações de 180 graus; Não há reflexões; Há reflexões deslizantes. Grupo pmg Para além das translações e rotações de 180 graus, estão presente reflexões em uma só direcção. Grupo pmm Rotações de 180 graus Reflexões em duas direcções. Os centros de rotação estão sobre os eixos de reflexão. Grupo cmm Rotações de 180 graus onde os centros de rotação não estão sobre os eixos de reflexão. Reflexões em duas direcções. Grupos Com Rotações de Grau 4 - 90 Graus Grupo p4 Não tem reflexões nem reflexões deslizantes, apenas rotações de 90 e 180 graus. Grupo p4m Rotações de 90 e 180 graus. Reflexões onde os eixos fazem um ângulo de 45 graus. Grupo p4g Rotações de 90 e 180. Reflexões onde os eixos não fazem ângulo de 45 graus. Grupos Com Rotações de Grau 3 - 120 Graus Grupo p3 Apenas rotações de 120 graus. Grupo p31m Rotações de 120 graus. Reflexões. Os centros de rotação não estão todos sobre os eixos de reflexão. Grupo p3m1 Rotações de 120 graus. Reflexões. Os centros de rotação estão todos sobre os eixos de reflexão. Grupos Com Rotações de Grau 6 - 60 Graus Grupo p6 Rotações de 60, 120 e 180 graus. Grupo p6m Acrescenta reflexões às simetrias do grupo anterior Qual é a menor rotação? 600 Existe reflexão? Existe reflexão? Existe reflexão? nenhuma Existe reflexão? pg p1 Si m Não pmm cmm Sim Estão todos os centros de rotação sobre os eixos de reflexão? Existe uma reflexão deslizante cujo eixo não é de reflexão? Não p2 pmg Não Si m pgg Sim Não p 4g Existe reflexão deslizante? Si m Si m p 4m Não Não p31m Não Si m p3m1 Existem reflexões em duas direcções? Si m Existe reflexão deslizante? Não o Existem reflexões cujos eixos fazem um ângulo de 450 Existe reflexão? Si m Nã p4 Estão todos os eixos de rotação sobre os eixos de reflexão? 1800 Si m Não p3 Si m Não p6 900 Não Si m p 6m 1200 pm cm Pavimentações Cada um dos motivos é isolado por uma figura geométrica. A reunião destas figuras geométricas gera uma rede, que cobre todo o plano. Pavimentações Com as pavimentações pretende-se cobrir completamente o plano, através de um conjunto numerável de ladrilhos que não se sobrepõem e não deixam espaços em branco. Conjuntos não conexos e cuja fronteira não é uma curva fechada ou que se cruza não são aceitáveis para construir uma pavimentação. Conjuntos não aceitáveis para ladrilhos de uma pavimentação Conjuntos aceitáveis para ladrilhos de uma pavimentação Pavimentações Regulares São constituídas apenas por polígonos regulares do mesmo tipo Só é possível construir 3. Lados Ângulo Interno Nº de Polígonos 3 60 6 4 90 4 5 108 3,333333333 6 120 3 7 128,5714286 2,8 8 135 2,666666667 9 140 2,571428571 10 144 2,5 11 147,2727273 2,444444444 12 150 2,4 13 152,3076923 2,363636364 14 154,2857143 2,333333333 15 156 2,307692308 16 157,5 2,285714286 17 158,8235294 2,266666667 18 160 2,25 19 161,0526316 2,235294118 20 162 2,222222222 Pavimentações Semi-Regulares ou Arquimedianas São as que não são formadas apenas por um polígono regular. Em torno de cada vértice pode encontrar-se triângulos equiláteros, hexágonos, quadrados e pentágonos regulares. Chama-se espécie de um vértice aos polígonos regulares que se intersectam nesse vértice. Chama-se tipo de vértice à ordem pela qual estão colocados os polígonos em torno do vértice. 17 espécies de vértices e 21 tipos É condição necessária para que uma pavimentação formada por polígonos regulares seja de um dos seguintes dos 21 tipos 3.3.3.3.3.3 3.3.3.3.6 3.3.3.4 3.3.4.3.4 3.3.4.12 3.4.3.12 3.3.6.6 3.6.3.6 17 espécies de vértices e 21 tipos 3.4.4.6 3.4.6.4 3.7.42 3.9.18 3.9.18 3.8.24 3.10.15 3.12.12 17 espécies de vértices e 21 tipos 4.4.4.4 4.5.20 4.6.12 6.6.6 4.8.8 5.5.10 Exemplos FIM
Baixar