Transformações Polares no Plano
Thiago Fassarella
UFF
2o Colóquio da Região Sudeste
Janeiro de 2012
Sumário
Introdução
1
2
3
v
Preliminares
1.1 Curvas algébricas no plano afim . .
1.2 Pontos singulares e suaves . . . . . .
1.3 O plano projetivo . . . . . . . . . . .
1.4 Curvas algébricas no plano projetivo
1.5 Multiplicidade de Interseção . . . . .
1.6 Pontos de inflexão . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
Fórmulas clássicas
2.1 Introdução a resolução de singularidades
2.1.1 Explodindo um ponto do plano . .
2.1.2 Coordenadas locais . . . . . . . . .
2.2 Funções holomorfas em duas variáveis . .
2.3 Explodindo um ponto em uma superfície
2.4 Resolução de singularidades de curvas . .
2.5 Interseção entre germes . . . . . . . . . .
2.6 Fórmulas Clássicas . . . . . . . . . . . . .
Transformação polar
3.1 Grau polar . . . . . . . . . .
3.2 Fórmulas para o grau polar
3.3 Classificação . . . . . . . . .
3.4 Um pouco de topologia . . .
iii
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
1
1
3
5
7
10
16
.
.
.
.
.
.
.
.
21
21
21
22
25
28
32
36
38
.
.
.
.
45
45
50
52
56
Introdução
Estas notas são direcionadas principalmente a alunos de graduação
que tenham cursado disciplinas básicas de Álgebra e Análise Complexa.
Ou seja, é esperado que o leitor tenha familiaridade com os seguintes conceitos: anéis, domínios, fatoração única, anéis de polinômios e funções
holomorfas em uma variável complexa.
O material está dividido em três capítulos. O primeiro capítulo é constituído da linguagem básica sobre curvas planas projetivas. As curvas
são sempre reduzidas. Em alguns pontos observamos que os resultados
podem ser estendidos se pensamos na curva como um polinômio homogêneo não necessariamente reduzido. Após as primeiras definições, demostramos o Teorema de Bézout via resultantes e terminamos o capítulo
falando sobre pontos de inflexão. No segundo capítulo, começamos com
uma introdução a resolução de singularidades. Definimos a explosão em
um ponto do plano e vamos até a demonstração do Teorema de Resolução
de curvas analíticas em uma superfície complexa suave. Todas as contas
são feitas em coordenadas locais e precisamos da linguagem de superfícies
apenas para dar uma noção mais global ao processo de resolução. Terminamos esse capítulo definindo alguns invariantes locais, como o número
de Milnor e o grau de singularidade. Por último apresentamos as fórmulas clássicas de Noether e de Milnor–Jung. O terceiro capítulo é baseado
em parte do artigo [7] em colaboração com Nivaldo Medeiros. Este capítulo é dedicado ao estudo do grau topológico da transformação polar, com
o objetivo de obter a classificação das curvas planas com grau polar ≤ 3.
Terminamos o capítulo enunciando um resultado de Dimca e Papadima
[5], mostrando a natureza topológica do grau polar.
v
Capítulo 1
Preliminares
1.1 Curvas algébricas no plano afim
Uma curva plana afim é o subconjunto C do plano definido pelo conjunto de pontos ( x, y) satisfazendo uma equação
f ( x, y) = 0,
onde f é um polinômio não–constante. Neste caso, escrevemos C = Z( f ).
As coordenadas x, y dos pontos e os coeficientes de f variam em um corpo
k. Por exemplo quando k = R, a curva definida pelo polinômio f ( x, y) =
x2 + y2 − 1 é um círculo de raio 1 e centro na origem (0, 0) ∈ R2 . Por
outro lado, a noção de curva acima não parece bem definida quando consideramos o polinômio f ( x, y) = x2 + y2 + 1 ou f ( x, y) = x2 + y2 , ainda
no caso k = R. Esse tipo de patologia fica descartada quando trabalhamos sobre um corpo k algebricamente fechado. É fácil ver que quando k
é algebricamente fechado (e portanto infinito) então a curva com equação f ( x, y) = 0 é um conjunto infinito. De fato, para cada x0 ∈ k fixado o conjunto dos pontos y ∈ k satisfazendo f ( x0 , y) = 0 é não–vazio,
caso f ( x0 , y) seja um polinômio não–nulo em y. Se f ( x0 , y) é nulo, então
f ( x, y) = ( x − x0 ) g( x, y) e nesse caso todo ponto da forma ( x0 , y), y ∈ k,
satisfaz a equação f ( x, y) = 0.
De agora em diante vamos supor k = C. É bem conhecido que o anel
de polinômios em duas variáveis C[ x, y] é um domínio de fatoração única
1
2
CAPÍTULO 1. PRELIMINARES
(veja [10, p. 48]), ou seja, qualquer polinômio f admite uma fatoração
n
única f = f 1 1 · · · f sns , a menos de multiplicação por escalares, onde os
fatores f 1 , ..., f s são irredutíveis e não proporcionais. Portanto a curva C =
Z( f ) é uma união de curvas C = C1 ∪ · · · ∪ Cs onde Ci = Z( f i ). Dizemos
que cada Ci é uma componente irredutível de C. No caso em que s = 1
dizemos que C é uma curva irredutível.
Vamos mostrar que se C é irredutível então um polinômio irredutível f
que define C está unicamente determinado, a menos de multiplicação por
um escalar. Isto é uma consequência do lema seguinte.
Lema 1.1. Seja C uma curva definida por um polinômio irredutível f ∈ C[ x, y].
Se g ∈ C[ x, y] é um polinômio qualquer tal que g( p) = 0 para todo p ∈ C, então
f divide g.
Demonstração. Vamos mostrar que se f não divide g então o conjunto dos
pontos satisfazendo as equações f ( x, y) = g( x, y) = 0 deve ser finito. O
que é absurdo.
Suponhamos f não divide g. Podemos pensar em f como um polinômio na variável x com coeficientes em C(y), onde x aparece com grau
positivo. Caso contrário, trocamos x por y. Afirmamos que f ainda é irredutível no anel C(y)[ x ]. De fato, suponhamos f = f 1 f 2 em C(y)[ x ] onde f 1
e f 2 possuem grau positivo em x. Multiplicando a igualdade anterior por
um denominador comum a(y) ∈ C[y] obtemos a(y) f = f˜1 f˜2 , com f˜1 , f˜2 ∈
C[ x, y] de grau positivo em x. O que contradiz a irredutibilidade de f em
C[ x, y]. Pelo mesmo motivo f não divide g em C(y)[ x ]. Portanto existem
ũ, ṽ ∈ C(y)[ x ] tal que ũ f + ṽg = 1. Multiplicando essa igualdade por um
denominador comum a(y) ∈ C[y] obtemos u f + vg = a em C[ x, y] onde
u = aũ e v = aṽ. Para cada ( x0 , y0 ) satisfazendo f ( x0 , y0 ) = g( x0 , y0 ) = 0
obtemos que y0 é uma raiz do polinômio não–nulo a(y), portanto existem apenas uma quantidade finita de valores para a segunda coordenada.
Agora para cada y0 fixado, temos que x0 é raiz do polinômio na variável
x, f ( x, y0 ). O polinômio f ( x, y0 ) é não–nulo, pois caso contrário, teríamos f ( x, y) divisível por y − y0 . Logo para cada y0 existem também uma
quantidade finita de valores para x0 .
1.2. PONTOS SINGULARES E SUAVES
3
Observação 1.2. De acordo com a prova do Lema 1.1, duas curvas sem
fator comum se intersectam em uma quantidade finita de pontos.
Dizemos que f ∈ C[ x, y] é reduzido se é livre de quadrados. Observe
que segue do lema acima que para cada curva C existe um único polinômio reduzido, a menos de multiplicação por escalar, definindo C.
Exercícios
1. Dê um exemplo onde f , g ∈ R[ x, y] são polinômios irredutíveis satisfazendo Z( f ) = Z( g), mas f e g não são múltiplos por um escalar.
1.2 Pontos singulares e suaves
Seja C uma curva definida por um polinômio reduzido f ∈ C[ x, y].
Um ponto p ∈ C é dito um ponto singular (ou uma singularidade) se
∂f
∂f
( p) =
( p) = 0. Caso contrário, dizemos que p é um ponto suave
∂x
∂y
(ou não–singular). Por exemplo a curva definida pela equação f ( x, y) =
y2 − x3 tem uma única singularidade em p = (0, 0). Dizemos que C é uma
curva suave se todos os seus pontos são suaves. É fácil ver que a curva
definida por f ( x, y) = x2 + y2 + 1 é suave.
Lema 1.3. Seja C ⊂ C2 uma curva plana, o subconjunto de C formado por pontos
singulares é finito.
Demonstração. Sendo que C possui uma quantidade finita de componentes irredutíveis podemos assumir que C é irredutível. Seja f ∈ C[ x, y] um
polinômio reduzido definindo C. Se C possui infinitos pontos singulares,
∂f
as curvas C = Z( f ) e D = Z( ) admitem infinitos pontos em comum,
∂x
∂f
então como na prova do Lema 1.1, obtemos que f divide
. Mas o se∂x
gundo polinômio tem grau menor do que o primeiro, e portanto devemos
∂f
∂f
= 0. A mesma conclusão se aplica a . Isto implica que f ∈ C, o
ter
∂x
∂y
que é absurdo.
CAPÍTULO 1. PRELIMINARES
4
Definição 1.4. Se p = ( x0 , y0 ) é um ponto suave de C = Z( f ) então a reta
tangente a C em p é dada por
∂f
2 ∂f
( p)( x − x0 ) + ( p)(y − y0 ) = 0 .
Tp C = ( x, y) ∈ C ;
∂x
∂y
Seja p ∈ C um ponto qualquer. A menos de uma translação do plano
afim, podemos supor p = (0, 0) ∈ C2 . Se f é um polinômio reduzido
definindo C, podemos escrevê–lo na forma f = f s + f s+1 + · · · + f s+l , s ≥
1, l ≥ 0, onde f s é não–nulo e cada f t , t = s, ..., s + l, é um polinômio
homogêneo de grau t, ou seja,
ft =
∑
i + j=t
aijt xi y j ,
aijt ∈ C.
Definição 1.5. A multiplicidade algébrica de C no ponto p, denotamos
m(C; p), é o inteiro positivo s acima, m(C, p) := s. Caso não haja possibilidade de confusão, escrevemos apenas m p .
Como f s é um polinômio homogêneo em duas variáveis, podemos
escrevê–lo como um produto de fatores lineares
fs =
k
∏(li (x, y))ei .
i =1
Definição 1.6. Dizemos que Z(li ) são as retas tangentes de C em p.
Observação 1.7. É fácil ver que p ∈ C é um ponto suave se, e somente
se, m p = 1. Suponhamos que p é um ponto de multiplicidade algébrica
igual a 2. Neste caso, f = f 2 + · · · + f 2+l onde f 2 = ax2 + bxy + cy2 é não–
nulo. Portanto temos duas possibilidades: (1) f 2 é um quadrado perfeito;
ou (2) f 2 é um produto de dois fatores lineares distintos. No primeiro caso
dizemos que p é uma cúspide. No segundo caso dizemos que p é um nó.
Exemplo 1.8. A curva dada pela equação f ( x, y) = y2 − x3 tem uma cúspide em p = (0, 0). Já a curva dada pela equação f ( x, y) = y2 − x2 − x3
tem um nó em p = (0, 0).
1.3. O PLANO PROJETIVO
5
Figura 1.1: Cúbicas: cuspidal e nodal.
1.3 O plano projetivo
Consideremos uma relação de equivalência ∼ em C3 \{0}. Dizemos
que dois pontos p, q ∈ C3 \{0} são equivalentes, escrevemos p ∼ q, se
existe λ ∈ C tal que p = λq. A classe de equivalência de um ponto p será
denotada por [ p].
Definição 1.9. O plano projetivo é o espaço formado pelo quociente de
C3 \{0} pela relação ∼. Isto é, o conjunto formado pelas classes de equivalência
P2 = {[ p] ; p ∈ C3 \{0}}.
Geometricamente, o plano projetivo pode ser identificado com o conjunto de retas que passam pela origem de C3 . De fato, segue diretamente
da definição que os pontos p, q são equivalentes se, e somente se, estão sobre uma mesma reta que passa pela origem. Se p = ( x0 , x1 , x2 ) ∈ C3 \{0},
vamos denotar a classe de p por [ p] = ( x0 : x1 : x2 ). Neste caso, temos
P2 = {( x0 : x1 : x2 ) ; ( x0 , x1 , x2 ) ∈ C3 \{0}}.
Podemos ver C2 como um subconjunto de P2 via inclusão ι : C2 −→ P2
que associa a cada ponto ( x, y), o ponto ( x : y : 1). A imagem desta função
é o conjunto
C22 = {( x0 : x1 : x2 ) ∈ P2 ; x2 6= 0}.
Claramente P2 contém outras duas cópias naturais de C2 . Denotamos C20
e C21 como os subconjuntos de P2 formados por pontos com coordenadas
CAPÍTULO 1. PRELIMINARES
6
x0 6= 0 e x1 6= 0, respectivamente. Todo ponto de P2 está em pelo menos
um destes subconjuntos C20 , C21 ou C22 .
O conjunto dos pontos no complementar de C22 ,
L∞ = {( x0 : x1 : x2 ) ∈ P2 ; x2 = 0}
são chamados de pontos no infinito. Também dizemos que L∞ é a reta no
infinito (veja o exercício 1).
Terminamos esta seção observando que existe uma topologia natural
em P2 induzida pela topologia do plano complexo. A projeção natural
π : C3 \{0} −→ P2
( x0 , x1 , x2 )
7→
( x0 : x1 : x2 )
induz uma topologia em P2 : U ⊂ P2 é aberto se π −1 (U ) é um aberto
de C3 \{0}. Sendo que esta topologia torna π contínua, segue que P2 é
um espaço topológico compacto. De fato, P2 é a imagem da esfera S2 ⊂
C3 \{0} de centro 0 e raio 1 (que é compacto).
Observe que os subconjuntos C20 , C21 e C22 definidos acima são abertos de P2 . Além disso, a topologia induzida em cada um destes abertos
coincide com a topologia usual de C2 . Desta forma vemos que P2 é uma
“compactificação” do plano afim. Como veremos na próxima seção, dada
uma curva plana afim podemos torná–la compacta adicionando pontos no
infinito.
Observação 1.10. Quando trabalhamos sobre um corpo qualquer k, ainda
é possível ver P2 como um espaço topológico compacto. Neste caso, a
topologia natural a ser considerada é a topologia de Zariski, onde os fechados são os conjuntos algébricos projetivos (veja [18, p. 41]). Esta topologia não é Hausdorff e é menos fina que a anterior. Apesar disso, nada se
perde no estudo dos conjuntos algébricos quando consideramos a topologia de Zariski. Nestas notas, estamos trabalhando sempre sobre o corpo
dos números complexos, desta maneira optamos por uma abordagem menos algébrica.
1.4. CURVAS ALGÉBRICAS NO PLANO PROJETIVO
7
Exercícios
1. Defina a reta projetiva P1 . Mostre que o conjunto dos pontos no infinito L∞ pode ser identificado com P1 .
1.4 Curvas algébricas no plano projetivo
Um polinômio homogêneo de grau d ≥ 0 nas variáveis x0 , x1 , x2 é um
polinômio da forma
F ( x0 , x1 , x2 ) =
∑
i + j+ k= d
j
aijk x0i x1 x2k ,
aijk ∈ C.
Observe que se λ ∈ C então F(λx0 , λx1 , λx2 ) = λd F( x0 , x1 , x2 ). Segue
que o anulamento de F no ponto ( x0 , x1 , x2 ) independe da escolha de um
representante na sua classe. Portanto dizemos que F se anula em ( x0 : x1 :
x2 ) ∈ P2 se F( x0 , x1 , x2 ) = 0.
Definição 1.11. Uma curva plana projetiva é um subconjunto C de P2 formado pelo conjunto de zeros de um polinômio homogêneo não–constante
F
C = {( x0 : x1 : x2 ) ∈ P2 ; F( x0 , x1 , x2 ) = 0}.
Escrevemos C = Z( F) e dizemos que F define C.
Uma curva algébrica afim C ⊂ C2 dada por um polinômio f ( x, y) de
grau d, define a curva plana projetiva C ⊂ P2 dada pelo polinômio homogêneo
x0 x1
d
,
.
F ( x0 , x1 , x2 ) = x2 f
x2 x2
Observe que intersectando a curva projetiva C com o plano afim C22 obtemos a curva afim C inicial. Se começamos com uma curva projetiva
C = Z( F), a curva afim correspondente será C = Z( f ) onde f ( x, y) =
F( x, y, 1). Dizemos que C é o fecho projetivo de C.
Definição 1.12. O grau de uma curva plana projetiva C, escrevemos grau(C ),
é definido como grau( F) onde F é um polinômio homogêneo reduzido que
define C.
CAPÍTULO 1. PRELIMINARES
8
Quando a curva projetiva não conter a reta no infinito L∞ ela a intersecta em uma quantidade finita de pontos. De fato, apenas uma quantidade finita de pontos da forma ( x0 : x1 : 0) satisfazem a equação F( x0 , x1 , 0) =
0. Estes são os pontos no infinito da curva afim associada.
Exemplo 1.13. Uma reta projetiva é uma curva plana projetiva definida
por um polinômio homogêneo de grau 1, F( x0 , x1 , x2 ) = a0 x0 + a1 x1 +
a2 x2 . Caso L 6= L∞ então esta intersecta L∞ no ponto (− a1 : a0 : 0). A
curva plana afim associada a uma reta projetiva é uma reta afim.
Observação 1.14. Dada uma reta L ⊂ P2 , observemos agora que a menos
de uma mudança de coordenadas projetivas podemos supor que esta é a
reta no infinito. Uma mudança de coordenadas projetivas é uma função
T : P2 −→ P2 induzida por um isomorfismo linear t : C3 −→ C3 , ou seja,
tal que o diagrama abaixo comuta.
C3 \{0}
t
π
/
C3 \{0}
π
P2
T
/
P2
A reta L ⊂ P2 determina um plano P = π −1 ( L) ∪ {0} ⊂ C3 . Podemos
escolher um isomorfismo linear t que envia o plano P no plano {y2 = 0}
onde denotamos por (y0 , y1 , y2 ) as coordenadas do contradomínio de t.
Portanto a reta L é enviada por T na reta L∞ nas novas cordenadas (y0 :
y1 : y2 ) ∈ P2 .
Exemplo 1.15. Consideremos a cúbica nodal dada por f ( x, y) = y2 − x2 −
x3 . A curva projetiva correspondente tem equação F( x0 , x1 , x2 ) = x2 x12 −
x2 x02 − x03 . Observe que C intersecta L∞ no ponto (0 : 1 : 0).
Sendo que todo ponto de P2 está em pelo menos um dos abertos afins
C20 , C21 ou C22 , podemos usar esta correspondência para descrever as propriedades das curvas planas projetivas em termos das curvas planas afins.
É fácil ver por exemplo que p é um ponto singular da curva afim C ∩ C2i
se, e somente se,
∂F
∂F
∂F
( p) =
( p) = 0.
( p) =
∂x0
∂x1
∂x2
1.4. CURVAS ALGÉBRICAS NO PLANO PROJETIVO
9
Veja o Exercício 2 a seguir. Portanto a seguinte definição de ponto singular
é compatível com a definição anterior dada no caso afim.
Definição 1.16. Seja C a curva projetiva definida pelo polinômio reduzido
F. Dizemos que p ∈ C é um ponto singular se
∂F
∂F
∂F
( p) =
( p) = 0.
( p) =
∂x0
∂x1
∂x2
Caso contrário dizemos que p é um ponto suave.
Exercícios
1. Sejam f ∈ C[ x, y] e F ∈ C[ x0 , x1 , x2 ] sua homogeinização, isto é,
x0 x1
d
,
.
F ( x0 , x1 , x2 ) = x2 f
x2 x2
Mostre que f é irredutível se, e somente se, F é irredutível.
2. Sejam C a curva projetiva definida pelo polinômio reduzido F e C a
curva afim correspondente. Mostre que p = ( p1 , p2 ) é ponto singular
de C se, e somente se,
∂F
∂F
∂F
( p1 , p2 , 1) =
( p1 , p2 , 1) = 0.
( p1 , p2 , 1) =
∂x0
∂x1
∂x2
3. A menos de mudança de coordenadas projetivas, existe apenas uma
cônica suave: x02 + x12 + x22 .
4. A menos de mudança de coordenadas projetivas, existe apenas uma
cúbica cuspidal: x12 x2 − x03 . Primeiro faça uma munça de coordenadas para supor que a cúspide é p = (0 : 0 : 1). Mostre que a equação
fica na forma F = ax12 x2 − bx03 − cx02 x1 − dx0 x12 − ex13 . Encontre mudanças de coordenadas que façam:
(a) a = b = 1;
(b) c = 0 (faça “x0 = x0 − (c/3) x1 ”);
CAPÍTULO 1. PRELIMINARES
10
(c) d = e = 0 (faça “x2 = x2 + Dx0 + Ex1 ”).
Com um raciocínio análogo, mostre que a menos de mudança de coordenadas projetivas, existe apenas uma cúbica nodal: x2 x12 − x2 x02 −
x03 .
1.5 Multiplicidade de Interseção
O Teorema de Bézout foi descoberto no século XVIII e é um dos principais resultados no estudo das curvas planas. Este nos diz qual o número
de pontos de interseção entre duas curvas planas projetivas. Estes pontos
devem ser contados com certas multiplicidades. Começaremos definindo
a multiplicidade de interseção entre uma curva C e uma reta L.
Interseção com uma reta
Seja C = Z( F) ⊂ P2 uma curva projetiva de grau d ≥ 1, onde F é
um polinômio reduzido. Começamos supondo que L não está contida em
C. Dados dois pontos distintos [q1 ], [q2 ] ∈ L, q1 , q2 ∈ C3 \{0} e [q2 ] ∈
/ C,
consideremos a seguinte parametrização de L\[q2 ]
L\[q2 ] = {[q1 + tq2 ] ; t ∈ C}.
O conjunto de pontos C ∩ L fica determinado pelos valores t ∈ C tais que
são zeros do polinômio em uma variável
g(t) = F(q1 + tq2 ).
Portanto p = [q1 + t p q2 ] ∈ C ∩ L se, e somente se, t p é uma raiz de g.
Definição 1.17. Dado p ∈ L a multiplicidade de interseção entre C e L em
p, I (C, L; p) é a ordem de t p como zero de g.
Observação 1.18. Observe que se p ∈
/ C então I (C, L; p) = 0. No caso em
que L ⊂ C podemos dizer que I (C, L; p) = ∞.
1.5. MULTIPLICIDADE DE INTERSEÇÃO
11
O número I (C, L; p) mede o quanto a reta L é tangente a curva C no
ponto p. Vamos supor que p é um ponto suave de C. Para simplificar,
colocamos p = (0, 0) ∈ C2 ⊂ P2 , C = Z( f ) e L = Z(ax + by). Com o
intuito de calcular I (C, L; p) tomamos a seguinte parametrização de L
L = {(−tb, ta) ; t ∈ C}.
Fazendo a expansão em série de Taylor vemos que
∂f
∂f
f (−tb, ta) =
( p)(−b) + ( p)a t + ...
∂x
∂y
(1.1)
onde “ ... ” representa termos de ordem ≥ 2 em t. Assim obtemos
I (C, L; p) ≥ 2 ⇐⇒
∂f
∂f
( p)(−b) + ( p)a = 0.
∂x
∂y
Portanto, neste caso em que p é um ponto suave vemos que I (C, L; p) ≥ 2
se, e somente se, L é a reta tangente a C em p.
Observação 1.19. No caso em que p é um ponto singular de C é fácil ver
que I (C, L; p) ≥ 2 para toda reta L passando por p.
Exemplo 1.20. Consideremos a cúbica cuspidal C = Z(y2 − x3 ). Seja
L = Z(ax + by) uma reta passando pela origem (0, 0) ∈ C2 . Fazendo a
expansão em série de Taylor como em (1.1) obtemos
f (−bt, ta) = t2 (a2 − tb3 ).
Portanto I (C, L; p) = 2 se, somente se, a 6= 0. Além disso, I (C, L; p) = 3
quando a = 0, isto é, quando L = Z(y) é o eixo-x. Isto está de acordo com
nossa intuição que a reta tangente a cúspide intersecta a curva com ordem
de contato maior que as outras.
Exercícios
1. A multiplicidade de interseção I (C, L; p) independe da escolha dos
pontos q1 , q2 acima.
CAPÍTULO 1. PRELIMINARES
12
2. Sejam C uma curva de grau d ≥ 1 e L uma reta que não está contida
em C. Então
∑ I (C, L; p) = d.
p∈ L ∩ C
Para quase todas as retas (defina quase todas!) temos que C ∩ L tem
exatamente d pontos, isto é, I (C, L; p) = 1 para todo p ∈ C ∩ L.
3. Sejam C1 e C2 curvas projetivas sem componentes em comum. Mostre que C1 ∩ C2 é um conjunto finito.
4. Mostre que I (C, L; p) ≥ m(C, p) para toda reta L passando por p.
Além disso, existe apenas um número finito de retas satisfazendo
I (C, L; p) > m(C, p). Em particular, se p ∈ C é um ponto singular,
então I (C, L; p) ≥ 2 para toda reta L passando por p. Dica: f =
f m p + f m p +1 ..., onde f m p é um produto de fatores lineares.
Interseção entre duas curvas
Agora vamos determinar o número de pontos de interseção entre duas
curvas sem componentes comuns C1 = Z( F1 ) e C2 = Z( F2 ) definidas por
polinômios reduzidos F1 e F2 de graus m e n respectivamente. Sendo que
esta quantidade é finita (Exercício 3 de 1.5), o conjunto de retas que passam por pelo menos dois destes pontos é finito, digamos L1 , ..., Lk . Assim
podemos escolher um ponto q satisfazendo
q ∈ P2 \(C1 ∪ C2 ∪ L1 ∪ · · · ∪ Lk ).
A menos de uma mudança de coordenadas projetivas podemos supor q =
(0 : 0 : 1) (veja a Observação 1.14). Para cada x = ( x0 : x1 : 0) ∈ P2
denotamos por Lx a reta que passa por x e q. Pela escolha de q temos
que cada reta Lx passa por no máximo um ponto de C1 ∩ C2 . Podemos
usar a resultante para decidir quando um ponto de C1 ∩ C2 está em Lx .
Expandimos os polinômios F1 e F2 na variável x2
F1 ( x0 , x1 , x2 ) = a0 x2m + a1 x2m−1 + ... + am ,
F2 ( x0 , x1 , x2 ) = b0 x2n + b1 x2n−1 + ... + bn .
1.5. MULTIPLICIDADE DE INTERSEÇÃO
13
Onde ai , b j ∈ C[ x0 , x1 ] são homogêneos, grau(ai ) = i e grau(b j ) = j. Sendo
q∈
/ C1 ∪ C2 , temos que a0 b0 6= 0.
Consideremos a resultante G ( x0 , x1 ) = R F1 ,F2 entre F1 , F2 ∈ D [ x2 ], D =
C[ x0 , x1 ]. Para definição e propriedades da resultante veja [10, p. 75] ou
[19, p. 22]. É conhecido que se F1 e F2 não possuem fator comum então
G é um polinômio de grau mn. Além disso, para cada ( x0 , x1 ) fixado, os
polinômios f 1 ( x2 ) = F1 ( x0 , x1 , x2 ) e f 2 ( x2 ) = F2 ( x0 , x1 , x2 ) admitem uma
raiz comum se, e somente se, G ( x0 , x1 ) = 0. Ou seja, C1 e C2 se intersectam
em um ponto de Lx se, e somente se, G ( x0 , x1 ) = 0. Mas pela escolha de q
cada Lx contém no máximo um ponto de C1 ∩ C2 . Isto mostra que
#C1 ∩ C2 ≤ mn.
Para que a desigualdade acima se torne uma igualdade temos que contar os pontos de interseção com as devidas multiplicidades. Pelo Teorema
Fundamental da Álgebra, existe uma fatoração de G da forma
G ( x0 , x1 ) = ( β 1 x0 − α1 x1 ) k 1 · · · ( β s x0 − α s x1 ) k s
Neste caso dizemos que (αi , β i ) é um zero de G de ordem ki , escrevemos
ord(αi ,βi ) G = ki . Isto motiva a seguinte definição:
Definição 1.21. Sejam C1 = Z( F1 ) e C2 = Z( F2 ) curvas sem componentes
em comum definidas por polinômios reduzidos F1 e F2 . De acordo com
que fizemos acima, podemos supor que as curvas não passam pelo ponto
q = (0 : 0 : 1) e além disso, cada reta passando por q contém no máximo
um ponto de C1 ∩ C2 . Seja G ( x0 , x1 ) a resultante entre F1 e F2 . Dado p =
( p0 : p1 : p2 ) ∈ C1 ∩ C2 definimos a multiplicidade de interseção de C1 e
C2 em p como a ordem de ( p0 , p1 ) como zero de G
I (C1 , C2 ; p) := ord( p0 ,p1 ) G.
O Teorema de Bézout segue diretamente da discussão acima.
Teorema 1.22. (Teorema de Bézout) Sejam C1 e C2 curvas planas projetivas sem
componentes em comum. Então
∑
p∈C1 ∩C2
I (C1 , C2 ; p) = grau(C1 )grau(C2 ).
CAPÍTULO 1. PRELIMINARES
14
Exemplo 1.23. Vamos calcular os pontos de interseção com as devidas
multiplicidades das cônicas
C1 = Z( x12 + x22 + x0 x1 ) e C2 = Z( x02 + 2x12 + x22 + 3x0 x1 ).
É fácil ver que as cônicas se intersectam em um único ponto p = (1 : −1 :
0). De acordo com o Teorema de Bézout, devemos ter I (C1 , C2 ; p) = 4.
Escrevendo
F1 ( x0 , x1 , x2 ) = x22 + a2 ,
F2 ( x0 , x1 , x2 ) = x22 + b2 .
onde a2 = x12 + x0 x1 e b2 = x02 + 2x12 + 3x0 x1 temos
1 0 a2 0
0 1 0 a2
R F1 ,F2 = det
.
1 0 b2 0
0 1 0 b2
Daí segue que
R F1 ,F2 = (b0 − a0 )2 = ( x0 + x1 )4 .
Portanto
I (C1 , C2 ; p) = 4.
Considerações sobre a multiplicidade de interseção
1. Na Definição 1.21 deveríamos mostrar que a ordem de um zero de
R F1 ,F2 independe de uma mudança de coordenadas projetivas. Preferimos não nos preocupar com este fato agora, pois no próximo capítulo veremos uma definição equivalente que é invariante por mudança de coordenadas locais.
2. Dados F e G polinômios homogêneos não necessariamente reduzidos, podemos definir a multiplicidade de interseção I ( F, G; p) entre
F e G em um ponto p ∈ P2 exatamente como fizemos anteriormente.
1.5. MULTIPLICIDADE DE INTERSEÇÃO
15
A resultante tem a seguinte propriedade multiplicativa (veja [10, Corolário III.3.17.]):
R F,GH = R F,G R F,H .
Portanto se por exemplo G = G1k então I ( F, G; p) = k · I ( F, G1 ; p).
Se pensarmos que uma curva projetiva é um polinômio homogêneo
não–constante, a menos de multiplicação por escalar não–nulo, o Teorema de Bézout continua valendo nesse caso.
3. A Definição 1.21 poderia ter sido feita em um aberto afim. De fato,
sejam Ci = Z( f i ) ⊂ C2 , i = 1, 2, e p = (0, 0) ∈ C1 ∩ C2 . A menos de uma mudança de coordenadas projetivas podemos que C1 e
C2 satisfazem as condições da Definição 1.21 e p = (1 : 0 : 0). A
multiplicidade entre C1 e C2 em p é a ordem de R f 1 , f 2 = G ( x ) em
x = 0:
I (C1 , C2 ; p) = ord0 R f 1 , f 2 .
4. A multiplicidade de interseção em um ponto tem o seguinte significado geométrico: se fizermos uma perturbação nos coeficientes das
curvas C1 e C2 que se intersectam em um ponto p com multiplicidade k, e chamamos as novas curvas de C1ǫ e C2ǫ então C1ǫ ∩ C2ǫ terá k
pontos distintos em uma vizinhança de p. Para que essa noção geométrica de multiplicidade ficasse mais precisa seria necessário introduzir outras ferramentas. Apesar disso, a definição via resultante
torna a demonstração do Teorema de Bézout extremamente simples.
Para que essa noção geométrica não fique tão vaga, podemos pensar
que a resultante depende continuamente dos coeficientes dos polinômios, portanto uma perturbação nesses coeficientes faz que uma raiz
de G de ordem k se torne k raízes distintas de ordem 1.
Exercícios
1. A Definição 1.21 de multiplicidade de interseção entre duas curvas
coincide com a Definição 1.17 no caso em que uma das curvas é uma
reta.
CAPÍTULO 1. PRELIMINARES
16
2. Determine os pontos de interseção (com multiplicidades) das curvas
C1 = Z( x0 x22 − x13 ) e C2 = Z( x0 x22 − x12 ( x1 + x0 )).
3. Uma curva irredutível de grau k tem no máximo k(k − 1) pontos
singulares.
1.6 Pontos de inflexão
Consideremos uma curva projetiva C definida por um polinômio reduzido F e seja p ∈ C um ponto suave. Em 1.5 vimos que a reta tangente
Tp C intersecta C em p com multiplicidade ≥ 2.
Definição 1.24. Dizemos que um ponto suave p ∈ C é um ponto de inflexão se
I (C, Tp C; p) ≥ 3.
Suponhamos que p é um ponto suave de C. Vamos analisar agora que
tipo de condição é imposta sobre F para que exista uma reta L satisfazendo
I (C, L; p) ≥ 3.
A menos de uma translação podemos supor p = (0, 0) ∈ C2 ⊂ P2 e
C = Z( f ) ⊂ C2 onde f ( x, y) = F( x, y, 1). Como f se anula em p podemos
escrever
∂f
∂f
f ( x, y) =
( p) x + ( p) y + h( x, y),
∂x
∂y
onde o polinômio h tem somente termos de grau ≥ 2. Seja L = Z(λy −
µx ), λ, µ ∈ C uma reta passando por p. Fazendo o desenvolvimento de
Taylor do polinômio g(t) = f (tλ, tµ) na variável t obtemos
2
2
g(t) = f ( p) + ( aλ + bµ) t + cλ + dλµ + eµ t2 + ....
onde
a=
∂f
1 ∂2 f
1 ∂2 f
∂2 f
∂f
( p) , b =
( p), c =
(
p
)
,
e
=
(
p
)
,
d
=
( p).
∂x
∂y
2 ∂x2
∂x∂y
2 ∂y2
(1.2)
1.6. PONTOS DE INFLEXÃO
17
A condição para que I (C, L; p) ≥ 3 é equivalente aos anulamentos:
f ( p) = aλ + bµ = cλ2 + dλµ + eµ2 = 0.
A primeira condição f ( p) = 0 diz apenas que p ∈ C. A segunda condição
aλ + bµ = 0
diz que caso p seja um ponto suave, L deve ser a reta tangente à C em p.
Se consideramos a reta L = Z(ax + by) e a cônica Q = Z(cx2 + dxy + ey2 ),
a terceira condição
cλ2 + dλµ + eµ2 = 0
juntamente com a segunda significa que a reta L está contida na cônica
Q. De fato, Q é uma união de duas retas e estas condições implicam que
L intersecta Q em pelo menos dois pontos: (0, 0) e (λ, µ). Isto mostra
que cx2 + dxy + ey2 é divisível por ax + by e portanto que a cônica q =
ax + by + cx2 + dxy + ey2 é redutível.
Reciprocamente, se q = ax + by + cx2 + dxy + ey2 é redutível então
podemos escrever
q( x, y) = (α1 x + β 1 y + γ1 )(α2 x + β 2 y + γ2 ).
Sendo q(0, 0) = 0 devemos ter γ1 = 0 ou γ2 = 0. Digamos γ2 = 0. Assim
obtemos γ1 (α2 x + β 2 y) = ax + by e portanto q é divisível por ax + by. Isto
mostra que sendo L = Z(ax + by) = Z(λy − µx ) a reta tangente a C em p
então temos
aλ + bµ = cλ2 + dλµ + eµ2 = 0.
Ou seja, I (C, L; p) ≥ 3.
Logo a condição I (C, L; p) ≥ 3 é equivalente a redutibilidade da cônica
q( x, y) = ax + by + cx2 + dxy + ey2
onde os coeficientes estão dados por (1.2). E a redutibilidade da cônica é
CAPÍTULO 1. PRELIMINARES
18
equivalente ao anulamento do determinante
det
∂2 f
∂2 f
(
p
)
( p)
∂x2
∂x∂y
∂2 f
∂2 f
( p)
( p)
∂x∂y
∂y2
∂f
∂f
( p)
( p)
∂x
∂y
∂f
( p)
∂x
∂f
( p)
∂y
0
= 0.
(1.3)
Sendo f ( x, y) = F( x, y, 1) podemos retornar para coordenadas projetivas:
∂F ∂ f
∂F ∂2 f
∂2 F
∂2 F ∂2 f
∂2 F ∂2 f
∂f
=
,
=
=
,
.
=
=
,
,
∂x
∂x0 ∂y
∂x1 ∂x2
∂x0 ∂x1
∂x02 ∂y2
∂x12 ∂x∂y
Vamos substituir essas relações em (1.3) e utilizar as seguintes identidades de Euler:
∂F
∂F
∂F
+ x1
= kF
+ x2
∂x0
∂x1
∂x2
∂F
∂2 F
∂2 F
∂2 F
= ( k − 1)
+ x2
x0 2 + x1
∂x0 ∂x1
∂x0 ∂x2
∂x0
∂x0
x0
x0
∂2 F
∂2 F
∂F
∂2 F
+ x1 2 + x2
= ( k − 1)
∂x0 ∂x1
∂x2 ∂x1
∂x1
∂x1
onde k é o grau de F.
Multiplicando a última coluna da matriz do nosso determinante por
(k − 1), subtraindo x0 vezes a primeira coluna, x1 vezes a segunda coluna
e lembrando que F( p) = 0 obtemos que (1.3) é equivalente a
det
∂2 F
∂2 F
∂2 F
( p)
( p)
( p)
∂x0 ∂x1
∂x0 ∂x2
∂x02
∂2 F
∂2 F
∂2 F
( p)
( p)
(
p
)
∂x1 ∂x0
∂x1 ∂x2
∂x12
∂F
∂F
∂F
( p)
( p)
( p)
∂x0
∂x1
∂x2
= 0.
(1.4)
1.6. PONTOS DE INFLEXÃO
Utilizando novamente as identidades de Euler
guinte condição equivalente:
∂2 F
∂2 F
∂2 F
(
p
)
( p)
(
p
)
∂x2
∂x0 ∂x1
∂x0 ∂x2
0
∂2 F
∂2 F
∂2 F
( p)
( p)
(
p
)
det
∂x1 ∂x0
∂x1 ∂x2
∂x12
∂2 F
∂2 F
∂2 F
( p)
( p)
( p)
∂x2 ∂x0
∂x2 ∂x1
∂x22
19
em (1.4) temos a se
= 0.
(1.5)
A matriz que aparece em (1.5) será chamada Matriz Hessiana de F em
p e denotada por HessF ( p). Resumimos o que foi feito acima na proposição seguinte.
Proposição 1.25. Sejam C = Z( F) uma curva plana projetiva definida pelo
polinômio reduzido F e p um ponto suave de C. Então p é ponto de inflexão se, e
somente se,
det(Hess F ( p)) = 0.
Exercícios
1. A cúbica nodal C = Z( x2 x12 − x2 x02 − x03 ) possui exatamente 3 pontos
de inflexão.
2. A cúbica cuspidal C = Z( x2 x12 − x03 ) possui exatamente 1 ponto de
inflexão.
3. Determine quantos pontos de inflexão possui a cúbica suave C =
Z( x03 + x13 + x23 ).
4. Uma curva irredutível de grau k possui no máximo 3k(k − 2) pontos
de inflexão.
20
CAPÍTULO 1. PRELIMINARES
Capítulo 2
Fórmulas clássicas
2.1 Introdução a resolução de singularidades
2.1.1 Explodindo um ponto do plano
No capítulo anterior definimos o plano projetivo P2 como o conjunto
de classes de equivalência de pontos em C3 \{0}. Vimos que P2 pode ser
coberto por abertos afins C20 , C21 e C22 , ou seja, cópias do plano afim C2 .
Isto nos permitiu fazer contas em coordenadas locais, simplificando alguns argumentos. Nesta seção vamos definir a explosão P2p de P2 em um
ponto p ∈ P2 . Assim como no caso do plano projetivo, P2p pode ser coberto
por abertos afins, reduzindo novamente a teoria ao caso de curvas planas
afins.
Vamos supor p = (0 : 0 : 1) ∈ P2 . A explosão de P2 no ponto p é o
subconjunto de P2 × P1 definido por
P2p = {(( x : y : z), (s : t)) ∈ P2 × P1 ; xt = ys}.
Consideremos a projeção natural
π : P2p −→ P2
(( x : y : z), (s : t))
7→
( x : y : z ).
Observe que a pré-imagem do ponto p = (0 : 0 : 1)
π −1 ( p) = {( p, (s : t)) ; (s : t) ∈ P1 }
21
CAPÍTULO 2. FÓRMULAS CLÁSSICAS
22
pode ser identificada com a reta projetiva P1 . Por outro lado, a pré-imagem
de um ponto qualquer q distinto de p é um único ponto.
Definição 2.1. O conjunto E = π −1 ( p) será chamado curva excepcional.
Desta forma, podemos dizer que o conjunto P2p foi obtido através de P2
trocando o ponto p por uma reta projetiva E ∼
= P1 .
Observação 2.2. Geometricamente, a curva excepcional pode ser identificada como o conjunto de “direções tangentes” pelo ponto p. De fato, dar
uma direção tangente em p é equivalente a dar uma reta passando por p.
A função que associa cada reta L = Z(sx + ty) passando pela origem, ao
ponto ( p, (t : −s)) ∈ E é uma bijeção. Veremos que π −1 ( L) = E ∪ L̃ onde
L̃ é uma curva que intersecta E no ponto ( p, (t : −s)) (veja o Exemplo 2.4).
2.1.2 Coordenadas locais
Denotemos por C2(x,t) ⊂ P2p a imagem da função injetiva
C2 −→ P2p
( x, t)
7→
(( x : xt : 1), (1 : t)).
A reta { x = 0} em C2 fica identificada com E menos o ponto ( p, (0 : 1)).
Sendo que C2(x,t) não cobre toda curva excepcional E, podemos considerar
C2(s,y) ⊂ P2p a imagem da função injetiva
C2 −→ P2p
(s, y)
7→
((sy : y : 1), (s : 1)).
Neste caso, a reta {y = 0} em C2 fica identificada com E menos o ponto
( p, (1 : 0)).
Para simplificar a notação vamos denotar um ponto de C2(x,t) com apenas as coordenadas ( x, t) via a identificação acima. E similarmente, um
ponto de C2(s,y) com coordenadas (s, y).
Na interseção C2(x,t) ∩ C2(s,y) temos a seguinte relação:
1
( x, t) ↔ (( x : tx : 1), (1 : t)) = ( (tx ) : tx : 1), (1/t : 1) ↔ (1/t, tx ) = (s, y)
t
2.1. INTRODUÇÃO A RESOLUÇÃO DE SINGULARIDADES
23
Finalmente, se denotamos por C2p = C2(x,t) ∪ C2(s,y) ⊂ P2p , vimos acima
que C2p pode ser construído tomando o quociente de duas cópias disjuntas
de C2 por uma relação de equivalência
2
2
2
C p = C(x,t) ⊔ C(s,y) / ∼
onde para cada ( x, t) ∈ C2(x,t) com t 6= 0, e para cada (s, y) ∈ C2(s,y) com
s 6= 0 temos
( x, t) ∼ (s, y) ⇐⇒ (1/t, tx ) = (s, y).
(2.1)
O conjunto C2p será chamado explosão de C2 na origem p = (0, 0).
Diremos que C2(x,t) e C2(s,y) são abertos afins de C2p (ou de P2p ). A expressão
da projeção π irá depender de quais coordenadas estamos utilizando
π : C2p −→ C2
( x, t)
7→
( x, tx )
(s, y)
7→
(sy, y).
Observe que π é de fato uma função bem definida, pois
( x, t) ∼ (s, y) =⇒ ( x, tx ) = (sy, y).
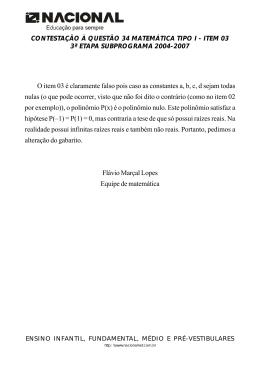
Dizemos que ( x, t) e (s, y) são coordenadas locais de C2p . Veja a Figura 2.1.
Exemplo 2.3. Vamos analisar a pré–imagem da cúbica cuspidal C = Z(y2 −
x3 ) ⊂ C2 via π. Para calcular a pré–imagem de C para o aberto afim de
coordenadas ( x, t) basta fazer y = tx em y2 − x3 :
(tx )2 − x3 = x2 (t2 − x ).
Assim temos
π −1 (C) ∩ C2(x,t) = { x2 (t2 − x ) = 0} = { x = 0} ∪ {t2 − x = 0}.
Analogamente, fazendo x = sy obtemos
π −1 (C) ∩ C2(s,y) = {y2 (1 − s3 y) = 0} = {y = 0} ∪ {1 − s3 y = 0}.
CAPÍTULO 2. FÓRMULAS CLÁSSICAS
24
t
y
E={x=0}
E={y=0}
u
x
(x,t)
(1/t,xt)
π
π
(x,tx)=(x,y)=(sy,y)
Figura 2.1: Coordenadas locais da explosão de C2 na origem.
Portanto concluímos que
π −1 (C) = E ∪ C̃ ⊂ C2p
onde E é a curva excepcional e C̃ é o subconjunto de C2p definido em cada
aberto afim pelos zeros de um polinômio.
1. no aberto afim C2(x,t) temos
C̃ ∩ C2(x,t) = {( x, t) ; t2 − x = 0};
2. e no aberto afim C2(s,y) por
C̃ ∩ C2(s,y) = {(s, y) ; 1 − s3 y = 0}.
Dizemos que C̃ é a transformada estrita de C. Veja a Figura 2.2.
Exemplo 2.4. A explosão separa as direções tangentes no ponto p. De fato,
assim como no exemplo anterior pode–se mostrar que a pré–imagem de
uma reta passando pela origem L(a:b) = Z(bx − ay) consiste em
π −1 ( L(a:b) ) = E ∪ L̃(a:b) ⊂ C2p
2.2. FUNÇÕES HOLOMORFAS EM DUAS VARIÁVEIS
25
onde a transformada estrita L̃(a:b) de L(a:b) é uma curva que intersecta E no
ponto
( p, (a : b)).
Portanto, como π é uma bijeção fora de E e de p, as transformadas estritas
de duas retas passando pela origem são duas curvas que não se intersectam em C2p .
E
.
.
E
.
.
.
Figura 2.2: Explosão das cúbicas singulares.
2.2 Funções holomorfas em duas variáveis
Nesta seção vamos definir uma curva determinada pelos zeros de uma
função holomorfa em um aberto de C2 . Para isso precisamos da noção de
função holomorfa em duas variáveis complexas. Assumiremos aqui que
o leitor está familiarizado com o conceito de funções holomorfas de uma
variável complexa.
Daqui em diante U irá denotar um aberto não–vazio de C2 .
Definição 2.5. Dizemos que uma função f : U −→ C é holomorfa em um
CAPÍTULO 2. FÓRMULAS CLÁSSICAS
26
ponto p = ( x0 , y0 ) ∈ U, se existe uma série de potências em p da forma:
∞
∑
i,j=0
aij ( x − x0 )i (y − y0 ) j
com aij ∈ C e tal que a série é convergente e coincide com f em uma
vizinhança de p. Dizemos que f : U −→ C é holomorfa se é holomorfa
em todo ponto de U.
A próxima observação permite decidir se uma função é holomorfa reduzindo ao caso de funções de uma variável complexa.
Observação 2.6. É fácil ver que se f : U −→ C é holomorfa, então para
cada ( x0 , y0 ) ∈ U as funções em cada variável separada f x0 (y) = f ( x0 , y)
e f y0 ( x ) = f ( x, y0 ) são holomorfas. A recíproca é verdadeira, mas a prova
não é imediata. Ao leitor interessado, indicamos [11, Teorema 2.2.8].
Dada uma função holomorfa f : U −→ C, podemos considerar o subconjunto C ⊂ U definido por
C = { p ∈ U ; f ( p ) = 0}.
Escrevemos C = Z( f ) e dizemos que C é a curva determinada pelos zeros
de f (estamos considerando o caso em que C pode ser o conjunto vazio).
Alguns conceitos dados anteriormente para curvas algébricas planas
podem ser traduzidos para este caso. Como por exemplo pontos singulares e suaves. Observe que na definição de ponto singular (Seção 1.2) foi
necessário escolher um representante reduzido definindo a curva. Devemos ter esse mesmo cuidado aqui. Para isso será necessário introduzir a
noção de germes de funções.
Definição 2.7. Dado um ponto p ∈ C2 . Dizemos que duas funções holomorfas f : U −→ C e g : V −→ C, com U, V ⊂ C2 abertos contendo
p, possuem o mesmo germe em p se existe um aberto W ⊂ U ∩ V tal
que f |W = g|W . O conjunto de germes de funções holomorfas em p será
chamado anel local em p e denotado por O p .
2.2. FUNÇÕES HOLOMORFAS EM DUAS VARIÁVEIS
27
Um elemento de O p é uma classe de funções holomorfas que coincidem, duas a duas, em alguma vizinhança de p. Portanto denotaremos um
elemento de O p por f onde f é um representante da classe. É fácil ver que
O p é um domínio e que os elementos invertíveis de O p são os elementos
da forma f com f ( p) 6= 0 (para algum representante f da classe f ).
Para a prova do próximo teorema veja [17, Teorema III.3.2].
Teorema 2.8. O anel local O p é um domínio de fatoração única.
∂f
( p) como a de∂x
no ponto x0 . De maneira análoga podemos definir
Dado um ponto p = ( x0 , y0 ) ∈ U denotaremos por
rivada da função f y0
∂f
( p).
∂y
Sejam C = Z( f ) ⊂ U e p ∈ C. Pelo Teorema 2.8, f ∈ O p admite uma
decomposição única em fatores irredutível da forma
f = f1
n1
n
· · · fk k .
Sem perda de generalidade, podemos supor que todas as f i estão definidas em um mesmo aberto W contendo p. Chamaremos de f red a função
definida em W por
f red := f 1 · · · f k .
Definição 2.9. Dizemos que p ∈ C = Z( f ) é um ponto singular se
∂ f red
∂f
( p) = red ( p) = 0.
∂x
∂y
Caso contrário, dizemos que p é um ponto suave. Além disso dizemos
que C é suave se todos os seus pontos são pontos suaves.
A multiplicidade algébrica de C em p ∈ C também pode ser definida
similarmente ao caso de curvas planas afins, isto é, m(C, p) é o menor
inteiro s tal que
f red = f s + f s+1 + · · ·
onde f s 6= 0 e cada f j é um polinômio homogêneo de grau j.
CAPÍTULO 2. FÓRMULAS CLÁSSICAS
28
2.3 Explodindo um ponto em uma superfície
Nesta seção, faremos uma pequena introdução aos conceitos de superfícies complexas para dar uma noção mais “global” do processo de resolução de uma curva. Não pretendemos utilizar argumentos sofisticados
da teoria de superfícies complexas. Na prática o leitor poderia se concentrar apenas nos casos C2 e C2p , pois como já observamos, todos os cálculos
serão feitos em coordenadas locais.
Antes da definição de superfície complexa precisamos da noção de funções holomorfas definidas em um aberto U ⊂ C2 tomando valores em C2 .
Dizemos que ϕ : U −→ C2 , ϕ( x, y) = ( f 1 ( x, y), f 2 ( x, y)), é holomorfa se
cada uma de suas funções coordenadas f 1 , f 2 : U −→ C são holomorfas.
Definição 2.10. Uma superfície complexa suave é um espaço topológico
Hausdorff S tal que existem uma cobertura por abertos S = ∪Uα de S e
homeomorfismos ϕα : Uα −→ ϕα (Uα ), onde ϕα (Uα ) ⊂ C2 são abertos e
1
as aplicações de transição ϕα ◦ ϕ−
β : ϕ β (Uα ∩ U β ) −→ ϕ α (Uα ∩ U β ) são
holomorfas. Dizemos que as funções ϕα são cartas locais de S.
Uα
Uβ
S
ϕα
ϕα(Uα)
ϕβ
ϕβ ϕα−1
ϕβ(Uβ)
Figura 2.3: Superfície complexa suave.
Exemplo 2.11. O plano projetivo P2 é uma superfície complexa suave. Vimos que P2 admite uma cobertura de abertos afins P2 = C20 ∪ C21 ∪ C22 .
2.3. EXPLODINDO UM PONTO EM UMA SUPERFÍCIE
29
Para cada aberto temos um homeomorfismo natural
ϕ0 : C20 −→ C2
(1 : y : z )
7→
(y, z)
ϕ1 : C21 −→ C2
( x : 1 : z)
7→
( x, z)
ϕ2 : C20 −→ C2
( x : y : 1)
7→
( x, y),
onde as aplicações de transição são claramente holomorfas. Por exemplo
ϕ1 ◦ ϕ2−1 : C2 \{ xy = 0} −→ C2 \{ xy = 0}
( x, y)
7→
( x/y, 1/y).
Exemplo 2.12. A explosão de C2 na origem é uma superfície complexa
suave. De fato, temos uma cobertura C2p = C2(x,t) ∪ C2(s,y) com bijeções
ϕ0 : C2(x,t) −→ C2
(( x : xt : 1), (1 : t))
7→
( x, t),
ϕ1 : C2(s,y) −→ C2
((sy : y : 1), (s : 1))
7→
(s, y).
O que nos permite definir uma topologia natural em C2p induzida pelas
bijeções. Além disso, as aplicações de transição são holomorfas:
ϕ1 ◦ ϕ0−1 : ϕ0 (C2(x,t) ∩ C2(s,y) ) −→ ϕ1 (C2(x,t) ∩ C2(s,y) )
( x, t)
7→
(1/t, xt)
ϕ0 ◦ ϕ1−1 : ϕ1 (C2(x,t) ∩ C2(s,y) ) −→ ϕ0 (C2(x,t) ∩ C2(s,y) )
(s, y)
7→
(sy, 1/s).
30
CAPÍTULO 2. FÓRMULAS CLÁSSICAS
Dada uma superfície complexa suave S, vamos definir a explosão de
S em p ∈ S. Segue imediatamente da definição que existem um aberto
U ⊂ S contendo p e um homeomorfismo ϕ : U −→ ϕ(U ) ⊂ C2 . Podemos
supor que ϕ( p) = (0, 0) ∈ C2 . Sejam π : C2p −→ C2 a projeção e W =
π −1 ( ϕ(U )). Sendo que
ψ = ( ϕ−1 ◦ π )|W \ E : W \ E −→ U \{ p}
é um homeomorfismo, podemos identificar os pontos de U \{ p} com os
pontos de W \ E.
Definição 2.13. A explosão S p de S em p é a superfície definida por esta
identificação, ou seja,
S p = (S\{ p} ⊔ W )/ ∼
onde ∼ estabelece a seguinte relação de equivalência nos pontos q ∈ U \{ p}
e r ∈ W \ E:
q ∼ r ⇐⇒ q = ψ(r ).
Deixamos para o leitor mostrar que S p é uma superfície complexa suave. Em Topologia, o processo de definição de S p acima é usualmente
chamado “cirurgia”. De fato, o que fizemos na prática foi recortar o aberto
U de S e colar uma vizinhança W da curva excepcional no lugar de U.
Definição 2.14. Sejam S1 e S2 superfícies complexas suaves. Dizemos que
φ : S1 −→ S2 é holomorfa se dadas cartas locais ϕ e ψ de S1 e S2 respectivamente, então ψ ◦ φ ◦ ϕ−1 é holomorfa. Se φ : S1 −→ S2 é holomorfa e
possui uma inversa holomorfa, dizemos que φ é um biholomorfismo.
Pode ser mostrado que a definição de explosão em p independe do
aberto U escolhido. No sentido que se S1p e S2p são explosões em p definidas através dos abertos U1 e U2 , respectivamente, então existe um biholomorfismo entre S1p e S2p . Este fato segue essencialmente do próximo lema.
Deixaremos os detalhes para o leitor.
Lema 2.15. Seja ϕ : U −→ V um biholomorfismo entre abertos U, V ⊂ C2
contendo a origem p = (0, 0) com ϕ( p) = p. Existe um biholomorfismo ϕ :
π −1 (U ) −→ π −1 (V ) tal que ϕ ◦ π |π −1 (U ) = π ◦ ϕ.
2.3. EXPLODINDO UM PONTO EM UMA SUPERFÍCIE
31
Demonstração. Sendo que π |C2p \ E : C2p \ E −→ C2 \{ p} é um biholomor-
fismo, ϕ : π −1 (U )\ E −→ π −1 (V )\ E está bem definida pondo ϕ = (π |C2p \ E )−1 ◦
ϕ ◦ π. Vamos mostrar que ϕ se estende como função holomorfa a curva
excepcional E.
Vamos analisar ϕ em π −1 (U ) ∩ C2(x,t) onde
C2(x,t) = {(( x : y : 1), (1 : t)) ∈ C2p ; y = tx }.
A análise em outro aberto afim é similar. Podemos escrever ϕ( x, y) =
( ϕ1 ( x, y), ϕ2 ( x, y)) onde
ϕ1 ( x, y) = a1 x + b1 y + ...
ϕ2 ( x, y) = a2 x + b2 y + ...
com a1 b2 − a2 b1 6= 0. Fora da curva excepcional, ou seja, fora de { x = 0} a
aplicação ϕ tem a seguinte expressão:
ϕ( x, t) = (( ϕ1 ( x, tx ) : ϕ2 ( x, tx ) : 1), ( ϕ1 ( x, tx ) : ϕ2 ( x, tx )))
= (( ϕ1 ( x, tx ) : ϕ2 ( x, tx ) : 1), (ψ1 ( x, t) : ψ2 ( x, t))).
onde ϕ1 ( x, tx ) = xψ1 ( x, t) e ϕ2 ( x, tx ) = xψ2 ( x, t). Segue da regra da cadeia que
∂ϕ1
∂ϕ
∂ψ
( x, tx ) + t 1 ( x, tx ) = ψ1 ( x, t) + x 1 ( x, t)
∂x
∂y
∂x
∂ϕ
∂ψ
∂ϕ2
( x, tx ) + t 2 ( x, tx ) = ψ2 ( x, t) + x 2 ( x, t).
∂x
∂y
∂x
A restrição de ϕ a curva excepcional será determinada pelas funções:
ψ1 (0, t) = a1 + tb1
ψ2 (0, t) = a2 + tb2 .
Sendo a1 b2 − a2 b1 6= 0 vemos que ϕ se estende e induz um automorfismo
entre as curvas excepcionais.
Observação 2.16. Temos uma projeção natural π : S p −→ S. Além disso,
segue imediatamente da construção que π −1 ( p) = E ∼
= P1 e π −1 (q) consiste em um único ponto caso q 6= p. Veja o Exercício 2 abaixo.
CAPÍTULO 2. FÓRMULAS CLÁSSICAS
32
Exercícios
1. Mostre que S p é uma superfície complexa suave.
2. Mostre que π |S p \ E : S p \ E −→ S\{ p} é um biholomorfismo.
2.4 Resolução de singularidades de curvas
Dada uma superfície complexa suave S e U ⊂ S um aberto não–vazio,
uma função f : U −→ C é holomorfa se para toda carta local ϕ : V ⊂
S −→ ϕ(V ) com V ∩ U não–vazio, tem–se que f ◦ ϕ−1 é holomorfa.
Definição 2.17. Um subconjunto C ⊂ S é uma curva analítica se existe
uma cobertura por abertos S = ∪Uα de S tal que
C ∩ Uα = Z ( f α ) = { p ∈ Uα ; f α ( p ) = 0 }
onde cada f α : Uα −→ C é holomorfa.
De maneira análoga como fizemos da Seção 2.2 podemos definir o anel
local em p ∈ S, e posteriormente pontos singulares e pontos suaves de C.
Deixaremos os detalhes para o leitor.
Sejam C ⊂ S uma curva analítica e p ∈ C. A pré–imagem de C via
π : S p −→ S consiste na união de duas curvas analíticas
π −1 (C) = E ∪ C̃.
De fato, fora da curva excepcional E, π é um biholomorfismo (Ex. 2 da
Seção 2.3). Portanto (π |S p \ E )−1 (C) é uma curva analítica em S p \ E. Seja C̃
o fecho desta curva em S p . Como π −1 ( p) = E o resultado segue. Faremos
a conta localmente para elucidar.
Digamos C = Z( f ) ⊂ U ⊂ C2 onde f é uma função holomorfa com
f (0) = 0. Podemos escrever
f = f k + f k+1 + ...
2.4. RESOLUÇÃO DE SINGULARIDADES DE CURVAS
33
onde f k 6= 0 e cada f j é um polinômio homogêneo nas variáveis ( x, y) de
grau j. Para tomar a pré–imagem de C via π basta olhar nos abertos afins
de C2p (veja o Exemplo 2.3). Fazendo y = xt obtemos
π −1 (C) ∩ C2(x,t) = {( x, t) ; f ( x, tx ) = 0}
= {( x, t) ; x k [ f k (1, t) + x f k+1 (1, t) + ...] = 0}
= (E ∩ C2(x,t) ) ∪ (C̃ ∩ C2(x,t) )
onde C̃ ∩ C2(x,t) = {( x, t) ; f k (1, t) + x f k+1 (1, t) + ... = 0}. No aberto afim
C2(s,y) a conta é similar.
Definição 2.18. Dizemos que C̃ é a transformada estrita de C.
Segue do Exemplo 2.3 que a transformada estrita da cúbica cuspidal é
uma curva suave. Neste caso, explodindo apenas uma vez já conseguimos
resolver a singularidade. O Teorema de Resolução de Singularidades diz
que sempre existe uma sequência de explosões em pontos singulares de
C, e das transformadas estritas que aparecem no processo de explosões
de maneira que a transformada estrita final seja suave. A quantidade de
explosões vai depender de quão complicadas são as singularidades de C.
Por exemplo, uma curva com uma singularidade do tipo cúspide da forma
Z(y3 − x5 ) tem como transformada estrita uma curva com singularidade
ainda do tipo cúspide da forma Z(y3 − x2 ), explodindo mais uma vez, a
curva se torna suave. Já no caso da cúbica nodal Z(y2 − x2 − x3 ), uma
explosão separa as duas direções tangentes tornando a curva suave.
O seguinte lema diz que a cada explosão as multiplicidades algébricas
não podem aumentar. Este será útil na prova do Teorema de Resolução de
Singularidades.
Lema 2.19. Seja C = Z( f ) onde f : U −→ C é uma função holomorfa em um
aberto U ⊂ C2 . Suponhamos que a transformada estrita C̃ de C, após a explosão
em um ponto p ∈ C, possui singularidades q1 , ..., qk ao longo da curva excepcional
E. Então
m(C, p) ≥
k
∑ m(C̃, qi ).
i =1
CAPÍTULO 2. FÓRMULAS CLÁSSICAS
34
Demonstração. Sejam f̃ i equação local de C̃ em uma vizinhança de qi ∈ E
e C̃i = Z( f˜i ). Observe que C̃i é a transformada estrita da curva Ci , constituída pela união dos ramos de C que possuem uma mesma tangente em
p. Podemos supor que f é um elemento reduzido em O p . Se Ci = Z( f i )
então f = f 1 · · · f k em O p . Isto implica que m( f , p) = ∑ik=1 m(Ci , p), logo
basta mostrar o lema para cada curva Ci .
Fazendo uma mudança linear de coordenadas podemos supor que a
tangente de Ci em p é L = Z(y). Neste caso, temos que a equação local de
Ci é da forma
f i = yn + ∑ aαβ x α y β
α+ β≥ n +1
onde n = m(Ci , p). Para obter a equação de C̃i na carta ( x, t) basta fazer
y = tx e dividir por x n
f̃ i = tn +
∑
aαβ x α+ β−n t β .
α+ β≥ n +1
Daí segue que m(C̃i , qi ) ≤ n = m(Ci , p).
Definição 2.20. Dizemos que uma função holomorfa φ : S̃ −→ S é uma
composição de explosões se φ = π1 ◦ · · · ◦ πn onde cada π j : S j −→ S j−1
é uma explosão em um ponto p j−1 ∈ S j−1 (S0 = S e Sn = S̃).
Teorema 2.21. (Resolução de Singularidades) Seja C ⊂ S uma curva analítica
em uma superfície complexa suave S. Existe uma superfície complexa suave S̃ e
uma função holomorfa φ : S̃ −→ S, tal que φ é uma composição de explosões e a
transformada estrita final C̃ ⊂ S̃ de C é uma curva suave.
Demonstração. Podemos fazer o argumento para cada singularidade p ∈
C. Assim podemos supor p = (0, 0) e C ⊂ U ⊂ C2 onde U é uma vizinhança suficientemente pequena da origem. Vamos mostrar que existe
uma composição de explosões φ : S̃ −→ U tal que todas as singularidades
q1 , ..., qk ∈ C̃ ⊂ S̃ satisfazem
m(C̃, qi ) < m(C, p).
(2.2)
2.4. RESOLUÇÃO DE SINGULARIDADES DE CURVAS
35
Podemos repetir esse processo até que todas as multiplicidades algébricas
sejam iguais a 1. O que garante que a transformada estrita final é suave.
Caso C tenha duas tangentes distintas em p, com apenas uma explosão teremos pelo menos duas singularidades acima de p. Segue do Lema
2.19 que todas as singularidades que aparecem na curva excepcional tem
multiplicidade menor do que m(C, p).
Portanto podemos supor que C tem apenas uma tangente L em p. Fazendo uma mudança linear de coordenadas vamos supor L = Z(y). Assim a equação local de C deve ser da forma
f = yn +
∑
α+ β≥ n +1
aαβ x α y β
onde n = m(C, p).
A transformada estrita de C tem equação local na carta ( x, t) da forma
f˜ = tn +
∑
α+ β≥ n +1
aαβ x α+ β−n t β .
Vamos denotar por q ∈ E ∩ C̃ a singularidade de C̃ acima de p. Se m(C̃, q) <
n = m(C, p), (2.2) está provado. Logo, pelo Lema 2.19 podemos supor
m(C̃, q) = n. Isto implica que aαβ = 0 para α + β − n < n, ou seja, para
α + β < 2n.
Suponhamos que C̃ tem uma única tangente em q (o caso com duas
tangentes distintas já foi resolvido!). Daí também temos aαβ = 0 para
α + β = 2n. Isto mostra que em f˜ só aparece termos em x de grau ≥ n + 1.
O que implica que L̃ = Z(t) é a reta tangente de C̃ em q.
Podemos supor que y não divide f , pois caso f = ym g onde y não
divide g, fazemos o argumento para g. Isto implica que aα0 6= 0 para
algum α ≥ 2n + 1. Seja α0 o mínimo dos valores α tal que isso acontece.
Assim f˜ tem equação da forma
f˜ = tn + aα0 0 x α0 −n + ...
onde aα0 0 x α0 −n é o monômio de menor grau somente na variável x. Repetindo esse processo, o grau deste monômio decresce em cada passo. Portanto em algum momento devemos chegar a uma das situações já resolvidas anteriormente.
CAPÍTULO 2. FÓRMULAS CLÁSSICAS
36
Definição 2.22. Dizemos que a transformada estrita final C̃ obtida pelo
Teorema 2.21 é uma normalização de C.
Exercícios
1. Seja S uma superfície complexa suave. Mostre que se S é conexa e
C ⊂ S é uma curva analítica, então S\C é um aberto conexo por
caminhos.
2. Obtenha uma normalização da curva Z( xy( x − y)( x3 − y2 )).
2.5 Interseção entre germes
Nesta seção estaremos interessados em propriedades locais de curvas
analíticas, isto é, em uma vizinhança suficientemente pequena de um ponto.
Isto justifica a seguinte definição:
Definição 2.23. Dado p ∈ C2 , dizemos que dois subconjuntos X, Y ⊂ C2
possuem o mesmo germe em p se existe uma vizinhança U de p tal que
X ∩ U = Y ∩ U. Isto define uma relação de equivalência entre os conjuntos. O germe de um conjunto será a classe de equivalência desse conjunto.
Quando não houver confusão, continuaremos denotando por X a classe
de X.
O germe do conjunto associado a uma curva analítica será chamado
de germe de curva analítica. Dado um germe de uma curva analítica
C = Z( f ) em p, consideremos a decomposição de f ∈ O p em fatores
irredutíveis
n
n
f = f 11 · · · f k k .
A cada f i podemos associar um germe de curva Ci = Z( f i ). Dizemos que
C1 ,...,Ck são os ramos de C em p.
Sejam C = Z( f ) e D = Z( g) germes de curvas analíticas em p sem
ramos em comum. Podemos supor que as classes de f e g em O p são
elementos reduzidos. Vamos definir a multiplicidade de interseção entre
C e D em p da seguinte forma. Seja ν : C̃ −→ C uma normalização de
2.5. INTERSEÇÃO ENTRE GERMES
37
C. A função g ◦ ν : C̃ −→ C se anula nos pontos q1 , ..., qk ∈ ν−1 ( p) se, e
somente se, C e D se intersectam em p. Denotaremos por ordqi ( g ◦ ν) a
ordem de anulamento de g ◦ ν no ponto qi . Ou seja, para cada qi existe
uma parametrização local αi : Ω −→ C̃, onde Ω ⊂ C é uma vizinhança da
origem e αi (0) = qi . Portanto se
( g ◦ ν ◦ αi )(t) = as ts + as+1 ts+1 + ...
com as 6= 0 então ordqi ( g ◦ ν) := s. É possível mostrar que essa ordem
independe da normalização escolhida, ou seja, da parametrização de C.
Definição 2.24. A multiplicidade de interseção entre os germes C e D no
ponto p é definida por
I (C, D; p) =
k
∑ ordqi (g ◦ ν).
i =1
Segue diretamente da definição que I (C, D; p) > 0 se, e somente se, C
e D se intersectam em p. Além disso,
I (C, D; p) = I (C1 , D; p) + ... + I (Ck , D; p)
onde Ci , i = 1, ..., k, são os ramos de C em p.
Considerações sobre a multiplicidade de interseção entre germes
1. Quando C e D são curvas planas projetivas, pode–se mostrar que a
definição anterior coincide com a Definição 1.21 (veja [9, Theorem
8.7]).
2. Outra caracterização da multiplicidade de interseção é dada pela dimensão do espaço vetorial sobre C:
I (C, D; p) = dimC
Op
< f, g >
,
(2.3)
onde < f , g > denota o ideal gerado pelos germes de funções das
curvas em O p . A equivalência entre as definições pode ser encontrada em [1, Proposition 9.1, p. 82].
CAPÍTULO 2. FÓRMULAS CLÁSSICAS
38
3. Caso f e g não são necessariamente reduzidos em O p , digamos
n
n
f = f 1 1 · · · f k k e g = g1l1 · · · g lss
a definição de multiplicidade de interseção pode ser estendida por
linearidade:
I ( f , g; p) = ∑ ni l j I (Ci , D j ; p).
i,j
A igualdade (2.3) continua valendo neste caso:
I ( f , g; p) = dimC
Op
< f, g >
.
(2.4)
4. As seguintes afirmações seguem de (2.3):
(a) I (C, D; p) = I ( D, C; p);
(b) I (C, D; p) é invariante por mudança de coordenadas locais (biholomorfismo).
(c) I (C, D; p) = 1 se, e somente se, C e D são suaves e se intersectam transversalmente em p.
2.6 Fórmulas Clássicas
Fórmula de Noether
Uma outra caracterização da multiplicidade de interseção pode ser dada
pela Fórmula de Max Noether que enunciaremos abaixo. Para a demonstração veja [3, p. 79].
Teorema 2.25. (Fórmula de Noether) Se C e D são germes de curvas analíticas
em p, sem ramos em comum, então
I (C, D; p) = m(C, p)m( D, p) +
∑ I (C̃, D̃; q)
q∈ E
onde E é a curva excepcional após uma explosão em p, C̃ e D̃ são as transformadas
estritas.
2.6. FÓRMULAS CLÁSSICAS
39
Dado um germe de curva analítica C singular no ponto p, mostramos
no Teorema de Resolução o seguinte: explodindo p, depois os pontos singulares da transformada estrita de C na curva excepcional e assim sucessivamente, obtemos uma composição de explosões
φ = π1 ◦ · · · ◦ πn : S̃ = Sn −→ · · · −→ S1 −→ S0 = S p
tal que a transformada estrita final C̃ é suave. Seja Cj ⊂ S j a transformada
estrita de C que aparece no j-ésimo passo, isto é,
1
Cj = φ−
j (C \{ p})
onde φ j = π1 ◦ · · · ◦ π j . Digamos que π j : S j −→ S j−1 é a explosão no
ponto p j−1 . Para cada j = 1, ..., n, consideremos o conjunto Ij (C, p) dos
1
∼ 1
pontos de Cj na curva excepcional π −
j ( p j−1 ) = P , ou seja,
1
Ij (C, p) = π −
j ( p j −1 ) ∩ C j .
Colocamos I0 (C, p) = { p}.
Definição 2.26. O conjunto dos pontos infinitamente próximos de p com
respeito a curva C é definido por
I (C, p) = ∪nj=0 Ij (C, p).
Se q ∈ Ij (C, p), denotaremos por m̃(C, q) a multiplicidade algébrica de
Cj em q, ou seja,
m̃(C, q) := m(Cj , q).
Observação 2.27. Fazendo um argumento indutivo, a Fórmula de Noether
pode ser colocada na seguinte forma:
I (C, D; p) =
∑
m̃(C, q)m̃ ( D, q)
(2.5)
q ∈ I (C,p)∩ I ( D,p)
onde na soma acima consideramos uma composição de explosões tal que
as transformadas estritas finais são suaves e não se intersectam.
CAPÍTULO 2. FÓRMULAS CLÁSSICAS
40
Grau de Singularidade
Temos associado a cada ponto q infinitamente próximo de p com respeito a uma curva analítica C, um número m̃(C, q). Para visualizar essa
sequência de multiplicidades podemos colocá-los em forma de um grafo.
Este grafo tem como vértices indicando os pontos infinitamente próximos
e dois vértices são ligados por uma aresta se um dos vértices está associado
a um ponto obtido após a explosão do ponto associado ao outro vértice.
Veja o exemplo da Figura 2.4.
Figura 2.4: Grafo de xy( x − y)( x3 − y2 ) = 0.
Definição 2.28. Seja C um germe de curva analítica, o grau de singularidade em p ∈ C é definido por
δ p (C ) =
1
m̃(C, q)(m̃ (C, q) − 1)
2 q∈ I∑
(C,p)
É fácil ver que δ p (C) = 0 se, e somente se, C é suave em p; δ p (C) = 1 se,
e somente se, C tem um nó ou uma cúspide em p. No exemplo da figura
2.4 temos δ p (C) = 11.
Proposição 2.29. Se C e D são germes de curvas analíticas em p, sem ramos em
comum, então
δ p (C ∪ D ) = δ p (C) + δ p ( D ) + I (C, D; p).
2.6. FÓRMULAS CLÁSSICAS
41
Demonstração. Sendo que a multiplicidade tem a seguinte propriedade aditiva
m̃(C ∪ D, q) = m̃(C, q) + m̃( D, q)
a prova da proposição seque da Observação 2.27.
Fórmula de Milnor–Jung
A cada singularidade de um germe de curva analítica podemos associar um número chamado número de Milnor. De certa forma, este número
mede o quanto complicada é a singularidade. Ao leitor interessado a se
aprofundar mais no assunto indicamos [13, 16].
Definição 2.30. Dado um germe de curva analítica C = Z( f ) e p ∈ C
definimos o número de Milnor de C em p por
µ p (C) = I ( f x , f y ; p) = dimC
Op
< fx , fy >
.
Exemplo 2.31. Consideremos as cúbicas singulares C = Z(y2 − x3 ) e D =
Z(y2 − x2 − x3 ). Facilmente vemos que µ p (C) = 2 e µ p ( D ) = 1 onde
p = (0, 0).
µp=2
µp=1
Figura 2.5: Número de Milnor das cúbicas singulares.
Os números δ p e µ p se relacionam por uma fórmula conhecida como
Fórmula de Milnor–Jung que enunciaremos abaixo. Para a demostração
veja [3, p. 207] ou [16].
CAPÍTULO 2. FÓRMULAS CLÁSSICAS
42
Teorema 2.32. (Fórmula de Milnor–Jung) Dado C um germe de curva analítica
em p, temos
µ p (C) = 2δ p (C) − r + 1
onde r é o número de ramos de C em p.
Segue do Teorema 2.32 e da Proposição 2.29 a seguinte propriedade
aditiva para o número de Milnor:
Proposição 2.33. Dados C e D germes de curvas analíticas, temos
µ p (C ∪ D ) = µ p (C) + µ p ( D ) + 2I (C, D; p) − 1.
Gênero geométrico
Uma superfície complexa suave foi definida como um espaço topológico Hausdorff localmente parametrizado por abertos de C2 . Em geral,
uma variedade complexa suave de dimensão n ≥ 1 é um espaço topológico Hausdorff localmente parametrizado por abertos de Cn . Uma superfície de Riemann é uma variedade complexa suave de dimensão 1. A
palavra superfície aqui está associada ao fato que uma superfície de Riemann tem dimensão real 2, ou seja, é localmente parametrizada pelo R2 .
Definição 2.34. Uma superfície de Riemann é um espaço topológico Hausdorff C tal que existem uma cobertura por abertos C = ∪Uα de C e homeomorfismos ϕα : Uα −→ ϕα (Uα ), onde ϕα (Uα ) ⊂ C são abertos e as
1
aplicações de transição ϕα ◦ ϕ−
β : ϕ β (Uα ∩ U β ) −→ ϕ α (Uα ∩ U β ) são holomorfas.
Exemplo 2.35. Uma curva analítica suave C ⊂ S é uma superfície de Riemann. As cartas locais de C podem ser obtidas através da Forma Local
das Submersões.
Um resultado clássico diz que uma superfície de Riemann compacta
conexa é homeomorfa a uma esfera com g asas. Veja a Figura 2.6. O número de asas g é chamado de gênero.
No caso em que C ⊂ P2 é uma curva plana projetiva irredutível de grau
k, o Teorema de Resolução de Singularidades diz que existe uma superfície
2.6. FÓRMULAS CLÁSSICAS
43
...
g=0
g=1
g=2
Figura 2.6: Superfícies de Riemann Compactas.
de Riemann compacta C̃ (normalização de C) e uma aplicação ϕ : C̃ −→ C
que é um biholomorfismo fora de um conjunto finito de pontos. É possível
mostrar (veja [9, p. 212]) que o gênero de C̃ é dado por
g=
(k − 1)(k − 2)
− ∑ δ p ( C ).
2
p∈ C
Dizemos que g é o gênero geométrico de C, vamos denotá-lo por
p g (C) := g.
(2.6)
44
CAPÍTULO 2. FÓRMULAS CLÁSSICAS
Capítulo 3
Transformação polar
3.1 Grau polar
Neste capítulo vamos focar no estudo da aplicação polar de uma curva
plana projetiva. Seja C = Z( F) definida por um polinômio homogêneo
reduzido não–constante F. A transformação polar de C é a aplicação ∇C :
P2 99K P2 definida pelas derivadas parciais:
∂F
∂F
∂F
(x) :
(x) .
(x) :
∇C( x) =
∂x0
∂x1
∂x2
Para simplificar a notação, usaremos o mesmo símbolo x para denotar um
ponto ( x0 : x1 : x2 ) de P2 ou um ponto ( x0 , x1 , x2 ) de C3 .
Em geral, uma aplicação g : P2 99K P2 definida por polinômios homogêneos de mesmo grau F0 , F1 e F2 por
g( x ) = ( F0 ( x ) : F1 ( x ) : F2 ( x ))
é dita uma aplicação racional. Podemos sempre supor que os polinômios
definindo g não possuem um fator comum. De fato, digamos Fi = F F̃i .
Portanto g se estende para uma função que continuamos denotando por
g:
g( x ) = ( F̃0 ( x ) : F̃1 ( x ) : F̃2 ( x )).
A função g não está definida no conjunto I = ∩Z( F̃i ). Utilizamos o símbolo “99K” acima para lembrar deste fato. Dizemos que I é o conjunto de
45
CAPÍTULO 3. TRANSFORMAÇÃO POLAR
46
pontos de indeterminação de g. Observe que I é um conjunto finito (pode
ser vazio). A restrição de g|(P2 \ I ) : P2 \ I −→ P2 é uma aplicação holomorfa. É possível mostrar que, a menos de uma composição de explosões,
podemos supor g definida em todos os pontos. Faremos o enunciado mais
preciso abaixo. A prova deste fato, conhecido como Teorema de Resolução
de Indeterminação pode ser encontrada em [2, Theorem II.7].
Teorema 3.1. Existem uma superfície complexa compacta S, uma composição de
explosões φ : S −→ P2 (começando em pontos de indeterminação de g) e uma
função holomorfa ψ : S −→ P2 tal que o diagrama abaixo é comutativo
S SSSS
SSS ψ
SSS
SSS
SSS
SSS
g
)
2
P _ _ _ _ _ _ _ _ _/ P2 .
φ
Como estamos supondo sempre C = Z( F) com F reduzido, o conjunto
de pontos de indeterminação de ∇C é o conjunto
∂F
∂F
∂F
2
(x) =
(x) = 0 .
(x) =
I= x∈P ;
∂x0
∂x1
∂x2
A restrição ∇C|P2 \ I : P2 \ I −→ P2 é uma aplicação holomorfa entre superfícies complexas.
Exemplo 3.2. Seja C = Z( x0 x1 x2 ) união de três retas não–concorrentes.
Temos
∇ C ( x 0 : x 1 : x 2 ) = ( x 1 x 2 : x 0 x 2 : x 0 x 1 ).
O conjunto de indeterminação coincide com os pontos de interseção entre
as retas
I = {(1 : 0 : 0), (0 : 1 : 0), (0 : 0 : 1)}.
Exemplo 3.3. Se C = Z( x02 + x12 + x22 ) uma cônica suave, então
∇ C ( x0 : x1 : x2 ) = ( x0 : x1 : x2 )
é a identidade em P2 . Temos I = ∅.
3.1. GRAU POLAR
47
Exemplo 3.4. Seja C = Z( x1 ( x2 x1 − x02 )) a união de uma cônica suave com
uma reta tangente. Temos
∇C( x0 : x1 : x2 ) = (−2x0 x1 : 2x2 x1 − x02 : x12 ).
Neste caso I = {(0 : 0 : 1)} é o ponto de interseção entre a reta tangente e
a cônica.
Vamos definir o grau topológico da aplicação ∇C como o número de
pontos na pré–imagem de um valor regular. Temos que mostrar que esse
número independe do valor regular escolhido. Primeiro vamos recordar a
definição de valor regular.
Definição 3.5. Seja ψ : S1 −→ S2 uma aplicação holomorfa entre superfícies complexas suaves. Dizemos que y ∈ S2 é um valor regular de ψ se
ψ−1 (y) é vazio ou se para todo x ∈ ψ−1 (y) temos que dψ( x ) : Tx S1 −→
Ty S2 é um isomorfismo.
Observação 3.6. No caso da aplicação ∇C|P2 \ I : P2 \ I −→ P2 pode ser
mostrado que y ∈ P2 é um valor regular se, e somente se, (∇C|P2 \ I )−1 (y) é
vazio ou det(HessF ( x )) 6= 0 para todo x ∈ (∇C|P2 \ I )−1 (y). Consideremos
a aplicação em coordenadas homogêneas ϕ : C3 −→ C3
∂F
∂F
∂F
( x ),
(x) .
( x ),
ϕ( x ) =
∂x0
∂x1
∂x2
A diferencial de ϕ em x = ( x0 , x1 , x2 ) é uma aplicação linear dϕ( x ) :
C3 −→ C3 cuja matriz coincide com Hessiana de F:
!
∂2 F
(x)
.
dϕ( x ) = HessF ( x ) =
∂xi ∂x j
i,j=0,1,2
Seja x ∈ C3 \{0}. Sendo que os polinômios que aparecem em dϕ( x ) são
homogêneos então det(dϕ( x )) 6= 0 se, e somente se, det(dϕ(λx )) 6= 0
para todo λ 6= 0. Portanto o anulamento do determinante de dϕ em x =
( x0 , x1 , x2 ) depende apenas da classe ( x0 : x1 : x2 ) de x em P2 . É fácil
ver que y = (y0 : y1 : y2 ) é valor regular de ∇C|P2 \ I se, e somente se,
(y0 , y1 , y2 ) é valor regular de ϕ. Deixaremos os detalhes para o leitor.
48
CAPÍTULO 3. TRANSFORMAÇÃO POLAR
Seja ψ : S1 −→ S2 uma aplicação holomorfa entre superfícies complexas suaves. Se S1 é compacta e y ∈ S2 é um valor regular de ψ então ψ−1 (y)
é um conjunto finito. De fato, se x ∈ ψ−1 (y), então segue do Teorema da
Função Inversa que existem abertos Ux ⊂ S1 contendo x e Vy ⊂ S2 contendo y tal que ψ|Ux : Ux −→ Vy é um biholomorfismo. Portanto ψ−1 (y) é
um conjunto discreto. Sendo S1 compacta o resultado segue.
Definimos o grau de ψ com respeito ao valor regular y como a cardinalidade do conjunto ψ−1 (y)
grauy ψ = #ψ−1 (y)
Vamos mostrar que este número independe do valor regular escolhido.
Primeiro precisamos da seguinte proposição:
Proposição 3.7. Seja ψ : S1 −→ S2 uma aplicação holomorfa entre superfícies
complexas suaves. Suponhamos S1 compacta e seja y ∈ S2 um valor regular com
ψ−1 (y) = { x1 , ..., xk }.
Então existe um aberto V ⊂ S2 contendo y tal que
ψ−1 (V ) = U1 ∪ · · · ∪ Uk
onde a restrição de ψ|Ui : Ui −→ V a cada um desses abertos é um biholomorfismo. Em particular, todo ponto de V tem o mesmo número de pré–imagens. Se
ψ−1 (y) é vazio então existe vizinhança V de y tal que ψ−1 (V ) é vazio.
Demonstração. Pelo Teorema da Função Inversa, existem vizinhanças abertas Ui de xi tal que ψ|Ui : Ui −→ Vyi é um biholomorfismo. Diminuindo
Ui se necessário podemos supor que todas as vizinhanças Vyi , i = 1, ..., k,
coincidem. Digamos V = Vyi . Falta mostrar que podemos escolher V de
forma que
ψ−1 (V ) = U1 ∪ · · · ∪ Uk .
(3.1)
Seja U = U1 ∪ · · · ∪ Uk . Suponhamos que não é possível encontrar tal vizinhança V satisfazendo (3.1), ou seja, que para toda vizinhança Vǫ de y
3.1. GRAU POLAR
49
existem um ponto yǫ ∈ Vǫ e pǫ ∈
/ U tal que ψ( pǫ ) = yǫ . Segue que podemos construir uma sequência de pontos pm ∈
/ U tal que ψ( pm ) = ym
converge para y. Sendo S1 compacta, passando a uma subsequência podemos supor que pm convergente para p0 ∈
/ U. Mas ψ( p0 ) = ψ(lim pm ) =
lim ψ( pm ) = y. O que é uma contradição, pois neste caso deveríamos ter
p0 = xi para algum i.
Proposição 3.8. Seja ψ : S1 −→ S2 uma aplicação holomorfa entre superfícies
complexas suaves. Suponhamos S1 compacta e S2 conexa. Se y1 , y2 ∈ S2 são
valores regulares de ψ então
grauy1 ψ = grauy2 ψ.
Demonstração. Seja C ⊂ S2 o conjunto dos valores críticos de ψ, isto é, o
conjunto dos pontos que não são valor regular. Temos que C = ψ( D )
onde D a curva analítica definida por
D = { x ∈ S1 ; det(dψ( x )) = 0}.
Sendo ψ holomorfa, C é um subconjunto analítico próprio (pelo Teorema
de Sard) de S2 . Portanto o complementar VR = S2 \C, isto é, o conjunto de
valores regulares é um aberto conexo por caminhos (veja o Exercício 1 da
Seção 2.4). Seja γ ⊂ VR um caminho ligando o ponto y1 ao ponto y2 . Pela
Proposição 3.7, para todo y ∈ γ existe um aberto Vy tal que todo ponto
de Vy possui o mesmo número de pré–imagens. A prova da proposição
segue do fato que podemos escolher uma quantidade finita de abertos Vy
cobrindo γ.
Seja ψ : S1 −→ S2 uma aplicação holomorfa entre superfícies complexas suaves satisfazendo as hipóteses da Proposição 3.8. Definimos o grau
de ψ (também chamado grau topológico) por
grauψ := grauy ψ.
onde y é um valor regular de ψ.
De acordo com o Teorema 3.1 existe um diagrama comutativo da forma
S SSSS
SSS ψ
SSS
SSS
SSS
SSS
)
∇
C
P2 _ _ _ _ _ _ _ _ _/ P2 .
φ
CAPÍTULO 3. TRANSFORMAÇÃO POLAR
50
onde ψ resolve as indeterminações de ∇C. Definimos o grau de ∇C como
grau(∇C) := grauψ.
Sendo φ uma composição de explosões, temos grauφ = 1. Portanto segue
da comutatividade do diagrama acima que grau(∇C) é o número de pontos na pré–imagem ∇C|P−21\ I (y) de um valor regular y ∈ P2 . Dizemos que
grau(∇C) é o grau polar de C.
Exercícios
1. Nos três exemplos dados nesta seção temos grau(∇C) = 1.
2. Se C é uma união de retas por um ponto, então grau(∇C) = 0.
3.2 Fórmulas para o grau polar
O grau polar pode ser calculado em função dos números de Milnor:
Teorema 3.9. Se C = Z( F) é uma curva plana projetiva definida por um polinômio homogêneo reduzido não–constante F de grau k, então
grau(∇C) = (k − 1)2 −
∑ µ p ( C ).
(3.2)
p∈ C
Optamos em omitir a demonstração do teorema, pois caso contrário
teríamos que introduzir mais ferramentas. Diferentes provas podem ser
encontradas em [5, 12, 7].
Exemplo 3.10. No caso em C é uma união de três retas não–concorrentes,
temos três singularidades onde cada uma delas contribui com µ p = 1
grau(∇C) = (3 − 1)2 − (1 + 1 + 1) = 1.
Exemplo 3.11. Se C é uma cônica suave temos
grau(∇C) = (2 − 1)2 − 0 = 1.
3.2. FÓRMULAS PARA O GRAU POLAR
51
Exemplo 3.12. No caso em C é uma união de uma cônica D com uma reta
tangente L, temos uma única singularidade com µ p = 3 (essa conta pode
ser feita utilizando a Proposição 2.33). Portanto
grau(∇C) = (3 − 1)2 − 3 = 1.
Exemplo 3.13. Consideremos as cúbicas singulares C = Z( x2 x12 − x03 ) e
D = Z( x2 x12 − x02 − x03 ). Temos
grau(∇C) = (3 − 1)2 − 2 = 2
grau(∇ D ) = (3 − 1)2 − 1 = 3.
Teorema 3.14.
1. Se C é uma curva plana projetiva irredutível de grau k então
grau(∇C) = k − 1 + 2p g (C) + ∑(r p − 1)
(3.3)
onde p g (C) é o gênero geométrico e r p é o número de ramos de C em p.
2. Se C e D são curvas planas projetivas sem componentes em comum então
grau(∇(C ∪ D )) = grau(∇C) + grau(∇ D ) + #(C ∩ D ) − 1. (3.4)
Demonstração. O gênero geométrico é dado por
pg =
(k − 1)(k − 2)
− ∑ δ p ( C ).
2
p∈ C
A fórmula (3.3) segue combinado isto com a Fórmula de Milnor–Jung (Proposição 2.32) e o Teorema 3.9.
Para a prova de (3.4) consideremos k = grau( F) e l = grau(G ). Pelo
Teorema 3.9 temos
grau(∇(C ∪ D )) = (k + l − 1)2 −
∑
µ p ( C ∪ D ).
p∈ C ∪ D
Que pode ser reescrito na forma
(k − 1)2 + (l − 1)2 + 2kl − 1 −
∑
p∈ C ∩ D
µ p (C ∪ D ) −
∑
p∈ C \ D
µ p (C ) −
∑
p∈ D \C
µ p ( D ).
CAPÍTULO 3. TRANSFORMAÇÃO POLAR
52
Pela propriedade aditiva do número de Milnor (Proposição 2.33) obtemos
grau(∇(C ∪ D )) = grau(∇C) + grau(∇ D ) + 2kl − 2
∑
I (C, D; p)
p∈ C ∩ D
+ #(C ∩ D ) − 1.
O resultado segue do Teorema de Bézout.
3.3 Classificação
Como consequência do Teorema 3.14 podemos classificar todas as curvas projetivas com grau polar ≤ 3.
Exemplo 3.15. Vamos mostrar que se C possui grau polar zero, então C é
uma união de retas passando por um ponto. De fato, por (3.4), todas as
componentes irredutíveis de C tem grau polar zero. Sendo que os termos
que aparecem em (3.3) são não–negativos:
2p g (C) ≥ 0, ∑(r p − 1) ≥ 0
todas as componentes irredutíveis de C devem ser retas. Além disso, todas
as retas passam por um único ponto, pois caso contrário, poderíamos escrever C = C1 ∪ C2 onde #(C1 ∩ C2 ) ≥ 2. O que nos daria grau(∇(C)) ≥ 1
por (3.4).
A classificação de curvas projetivas com grau(∇(C)) = 1 foi feita primeiramente por I. Dolgachev em [6]. Veremos que uma demonstração
simples pode ser obtida através das equações (3.3) e (3.4).
Teorema 3.16. (Dolgachev) Se C é uma curva plana projetiva com grau(∇C) =
1 então C deve ser uma entre as seguintes possibilidades:
1. união de três retas não–concorrentes;
2. cônica suave;
3. união de uma cônica suave com uma reta tangente.
3.3. CLASSIFICAÇÃO
53
Demonstração. Pelas equações (3.3) e (3.4), C deve ter somente retas e no
máximo uma cônica suave como componentes irredutíveis. Se C possui
uma cônica suave como componente então (3.4) implica que C possui no
máximo uma reta como componente e esta reta deve ser tangente a cônica.
Suponhamos agora que C possui somente retas como componentes irredutíveis. Se todas as retas são concorrentes então grau(∇C) = 0. Se C é uma
união de três retas não–concorrentes então grau(∇C) = 1. Finalmente, se
C possui mais de três retas (não–concorrentes) como componentes irredutíveis então (3.4) nos dá grau(∇C) > 1.
De maneira similar obtemos a classificação para grau polar 2 e 3 (Teoremas 3.17 e 3.19 abaixo).
Teorema 3.17. Se C é uma curva plana projetiva com grau(∇C) = 2, então C
deve ser uma entre as seguintes possibilidades:
1. três retas passando por um ponto p e uma quarta reta que não passa por p;
2. uma cônica suave e uma reta secante;
3. uma cônica suave, uma reta tangente e uma reta secante passando pelo
ponto de tangência;
4. uma cônica suave e duas retas tangentes;
5. duas cônicas suaves se encontrando em um único ponto;
6. duas cônicas suaves se encontrando em um único ponto e a reta tangente
em comum;
7. uma cúbica cuspidal irredutível;
8. uma cúbica cuspidal irredutível e sua reta tangente pelo ponto de inflexão;
9. uma cúbica cuspidal irredutível e sua reta tangente pela cúspide.
Demonstração. Tal curva não pode ter componentes irredutíveis de grau
maior do que 3. Já vimos que uma cúbica irredutível de grau polar 2 deve
CAPÍTULO 3. TRANSFORMAÇÃO POLAR
54
ser cuspidal. Por (3.4), somente uma reta pode ser adicionada a essa cúbica, e esta deve ser a tangente pelo ponto de inflexão ou a tangente pela
cúspide (para que tenha um único ponto de interseção). Estes cobrem os
três últimos casos afirmados acima. Os casos que restam (cônicas e retas)
podem ser analisados de maneira similar.
1
2
3
4
5
6
7
8
9
Figura 3.1: Curvas planas com grau polar 2.
Observação 3.18. Na demonstração do Teorema 3.17 estamos usando o
fato que, a menos de mudança de coordenadas projetivas, existem apenas
uma cônica suave e duas cúbicas singulares (cuspidal e nodal). Veja os
Exercícios 3 e 4 da Seção 1.4.
Teorema 3.19. Se C é uma curva plana projetiva com grau(∇C) = 3, então C
deve ser uma entre as possibilidades mostradas na figura 3.2.
Demonstração. Neste caso podem aparecer quárticas irredutíveis como componentes de C. Em vista de 3.3 essas quárticas devem ter apenas cúspides
como singularidades (i.e., r p = 1 para todo p) e além disso, devem ser
racionais (i.e., p g = 0). A menos de mudança de coordenadas projetivas,
existem apenas 5 quárticas racionais cuspidais, essas podem ser encontradas em [14] (veja também [15]), com os respectivos pontos de inflexão.
3.3. CLASSIFICAÇÃO
55
Por (3.4) apenas uma reta tangente L por um ponto de inflexão total (i.e.
I (C, L; p) = 4) ou por uma cúspide onde I (C, L; p) = 4. Pois neste caso, L
toca a curva em um único ponto.
Para terminar, falta analisar todas as configurações de retas, cônicas
e cúbicas. O único caso que merece maior atenção é o caso de cônicas e
cúbicas. Sejam C1 uma cônica e C2 uma cúbica ambas irredutíveis. Sendo
grau(∇C1 ) = 1 segue de (3.4) que
grau(∇(C1 ∪ C2 )) = grau(∇C2 ) + #(C1 ∩ C2 ).
Se grau(∇(C1 ∪ C2 )) = 3 temos apenas uma possibilidade, a cúbica deve
ser cuspidal e deve encontrar a cônica em um único ponto. É possível mostrar que esse caso não existe. A prova deste fato pode ser encontrada em
[7]. Infelizmente não fomos capazes de demonstrar isto utilizando apenas
as ferramentas contidas nestas notas.
CAPÍTULO 3. TRANSFORMAÇÃO POLAR
56
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
=
Ponto onde as tangentes tocam a curva apenas neste ponto.
1-12 são cônicas e retas.
13-21 são cúbicas e retas.
22 é a quártica tri-cuspidal.
23 (e 24) é a quártica bi-cuspidal (com tangente na cúspide).
25-31 são as restantes três quárticas com uma única cúspide e as tangentes que
as tocam em um único ponto.
Figura 3.2: Curvas planas com grau polar 3.
3.4 Um pouco de topologia
O grau polar está diretamente relacionado com a topologia da curva.
De fato, existe uma caracterização para grau(∇C) em termos do tipo de
homotopia de C\ L, onde L é uma reta genérica em P2 . Este resultado foi
mostrado por A. Dimca e S. Papadima utilizando métodos que vem da
Teoria de Morse Complexa (veja [5, 4]). Esta caracterização é válida para
hipersuperfícies em espaços projetivos de dimensão arbitrária, mas enunciaremos aqui apenas o caso planar. Antes disso vamos recordar algumas
3.4. UM POUCO DE TOPOLOGIA
57
definições básicas.
Seja I = [0, 1]. Dadas aplicações contínuas f , g : X −→ Y entre espaços
topológicos, dizemos que f e g são homotópicas, escrevemos f ∼ g, se
existe uma aplicação contínua
H : X × I −→ Y
tal que H ( x, 0) = f ( x ) e H ( x, 1) = g( x ) para todo x ∈ X. A aplicação H é
dita uma homotopia entre f e g.
Dizemos que dois espaços topológicos X e Y têm o mesmo tipo de
homotopia se existem aplicações contínuas f : X −→ Y e g : Y −→ X tal
que g ◦ f ∼ id X e f ◦ g ∼ idY .
Exemplo 3.20. A esfera Sn = { x ∈ Rn+1 ; || x || = 1}, n ≥ 1, tem o mesmo
tipo de homotopia que Rn+1 \{0}. De fato, consideremos as aplicações
f : Sn −→ Rn+1 \{0} e g : Rn+1 \{0} −→ Sn definidas por f ( x ) = x e
x
. Temos que g ◦ f = idSn e f ◦ g é homotópica a aplicação
g( x ) =
|| x ||
identidade em Rn+1 \{0}. A homotopia é dada por
H ( x, t) = (1 − t)
x
+ tx.
|| x ||
Exemplo 3.21. A projeção estereográfica nos dá um homeomorfismo entre
a esfera menos um ponto S2 \{ p} e o plano R2 . Portanto segue do exemplo
anterior que a esfera menos dois pontos S2 \{ p, q} tem o mesmo tipo de
homotopia de um círculo S1 .
Para o enunciado do próximo teorema, lembramos que um bouquet
de círculos é uma união de círculos com apenas um ponto em comum.
Teorema 3.22. (Dimca–Papadima) Seja C uma curva plana projetiva. Se L ⊂ P2
é uma reta genérica, então C\ L tem o mesmo tipo de homotopia de um bouquet de
círculos. O número de círculos neste bouquet é grau(∇C).
Exemplo 3.23. Se C é uma cônica suave, pela fórmula do gênero geométrico (2.6)
(2 − 1)(2 − 2)
− 0 = 0.
p g (C ) =
2
58
CAPÍTULO 3. TRANSFORMAÇÃO POLAR
.
Figura 3.3: Bouquet de círculos.
O que implica que C é homeomorfa a uma esfera S2 . Pelo Teorema de
Bézout, uma reta genérica L intersecta C em dois pontos. Portanto o complementar C\ L é homeomorfo a uma esfera menos dois pontos. Vimos no
Exemplo 3.21 que C\ L tem o mesmo tipo de homotopia de um círculo. O
que é compatível com o Teorema 3.22 pois grau(∇C) = 1.
O teorema acima é de fato uma consequência do seguinte (veja [4] para
os detalhes):
Teorema 3.24. Dada uma curva plana projetiva C temos
grau(∇C) = 1 − e(C\ L)
onde e(C\ L) é a característica de Euler do complementar em C de uma reta genérica L ⊂ P2 .
Observação 3.25. Nestas notas estamos considerando apenas curvas reduzidas. Na definição da transformação polar poderíamos considerar F um
polinômio não–reduzido e definir a transformação polar ∇ F associada ao
polinômio F. O teorema acima continua válido se trocamos ∇C por ∇ F
onde F é não necessariamente reduzido. Como corolário obtém–se que
grau polar depende apenas do conjunto de zeros do polinômio F:
n
grau(∇( F1n1 · · · Fk k )) = grau(∇( F1 · · · Fk )).
3.4. UM POUCO DE TOPOLOGIA
59
Este fato também foi mostrado em [8] utilizando técnicas de folheações
holomorfas. Observamos também que equação (3.4) segue do Teorema
3.24.
Exemplo 3.26. Se C é uma cúbica cuspidal, então pela fórmula do gênero
geométrico (2.6) temos
p g (C ) =
(3 − 1)(3 − 2)
− 1 = 0.
2
O que quer dizer que a normalização C̃ é homeomorfa a uma esfera. Mas
C e C̃ são homeomorfas pois temos um único ponto infinitamente próximo
da cúspide p ∈ C (distinto de p). Daí segue que e(C) = 2. Portanto, pelo
Teorema de Bézout, C\ L é uma esfera menos três pontos. Pelo princípio
de inclusão–exclusão
e(X ∪ Y ) = e(X ) + e(Y ) − e(X ∩ Y )
e do fato que a característica de Euler de um conjunto finito é a cardinalidade do conjunto, obtemos
grau(∇C) = 1 − e(C\ L) = 1 − (e(C) − 3) = 2.
Exemplo 3.27. Se C é uma cúbica nodal, então pelo mesmo argumento
do exemplo anterior a normalização C̃ de C é homeomorfa a uma esfera.
Neste caso, temos dois pontos, digamos q1 , q2 ∈ C̃, infinitamente próximos
do nó p ∈ C. Portanto C\{ p} e C̃\{q1 , q2 } são homeomorfos. Segue que
e(C) = e(C\{ p}) + 1 = e(C̃ \{q1 , q2 }) + 1 = e(C̃ ) − 1 = 1.
Daí obtemos
grau(∇C) = 1 − e(C\ L) = 1 − (e(C) − 3) = 3.
60
CAPÍTULO 3. TRANSFORMAÇÃO POLAR
Referências Bibliográficas
[1] Barth, W., Hulek, K., Peters, C., Van de Ven, A. Compact Complex
Surfaces, Ergebnisse der Mathematik , 4, Springer Verlag (2004).
[2] Beauville, A. Complex Algebraic Surfaces, Student Texts, 34, London
Math. Society (1996).
[3] Casas-Alvero, E. Singularities of plane curves, Lecture Notes Series,
276, Cambridge University Press, London, (2000).
[4] Dimca, A. On Polar Cremona Transformations, An. St. Univ. Ovidius
Constanta, v. 9(1) (2001), 47-54.
[5] Dimca, A., Papadima S. Hypersurfaces complements, Milnor fibres
and higher homotopy groups of arrangements, Ann. of Math. 158
(2003), 473-507.
[6] Dolgachev, I. Polar cremona transformations. Michigan Math. J. 48
(2000), 191–202.
[7] Fassarella T., Medeiros N. On the polar degree of projective hypersurfaces, J. London Math. Society, 2 (2012), 259-271.
[8] Fassarella T., Pereira J. On the degree of polar transformations. An
approach through logarithmic foliations. Sel. Math. New Series 13
(2007), 239–252.
[9] Fischer, G. Plane Algebraic Curves, Student Math. Library, 15, AMS
(2001).
61
62
REFERÊNCIAS BIBLIOGRÁFICAS
[10] Garcia, A., Lequain, I. Elementos de Álgebra, Projeto Euclides, Segunda Edição (2003).
[11] Hormander, L. An Introduction to Complex Analysis in Several Variables, Van Nostrand (1966).
[12] Huh J. Milnor numbers of projective hypersurfaces and the chromatic
polynomial of graphs, J. Amer. Math. Soc. 25 (2012), 907-927.
[13] Milnor, J. Singular Points of Complex Hypersurfaces, Ann. Math. Studies, 61, Princeton University Press, (1968).
[14] Moe, T.K. Rational Cuspidal Curves, MSc thesis, Univ. of Oslo
(2008).
[15] Namba, M. Geometry of projective algebraic curves, Monographs and
Textbooks in Pure and Applied Math., 88, Marcel Dekker Inc.
(1984).
[16] Santos, M.L. A fórmula de Milnor–Jung, Dissertação de mestrado,
Universidade Federal do Espírito Santo (2012).
[17] Sebastiani, M. Introdução à Geometria Analítica Complexa, Projeto
Euclides IMPA (2004).
[18] Shafarevich, I. R. Basic Algebraic Geometry I, Springer-Verlag, Second Edition (1974).
[19] Vainsencher, I. Introdução às curvas algébricas planas, Coleção Matemática Universitária IMPA (2005).
Baixar