Escola Náutica Infante D. Henrique
SISTEMAS DE CONTROLO
SISTEMAS DINÂMICOS E CONTROLO
EXERCÍCIOS
José Dores Costa
1999
Exercícios para as aulas práticas
Os exercícios seguintes destinam-se a orientar e a complementar o estudo da disciplina de
Sistemas e Controlo, nos capítulos que dizem respeito à chamada Teoria Clássica do
Controlo. Propõe-se a utilização do programa Matlab com o Control Toolbox para a
resolução de alguns problemas com o auxílio do computador. O objectivo não é formar
especialistas do Matlab, mas sim, que os resultados obtidos por esta via possam ser
comparados com aqueles que os alunos devem obter, matematicamente, enquanto estudam
esta disciplina.
Como complemento, apresentam-se também alguns exemplos que pode ser feitos no
PSPICE.
Outros problemas, que consistem em usar o Matlab para efectuar o controlo directo com
computador, serão objecto de outras fichas práticas.
________________________________________________________________________
Exercício 1
Como treino do Matlab, pretende-se visualizar a curva de
x
10
f ( x ) = sen ( x ) e
−
quando x ∈[0, 50], dividido em 200 pontos.
Começe por criar um ficheiro funcao.m com as seguintes instruções
function f=funcao(x)
f=sin(x).*exp(-x/10);
(note que o produto nas funções é escrito como .*)
Depois de gravar o ficheiro, na janela de comandos, à frente do prompt >>, escreva
fplot('sinus', [0 50], 200);
Se pretender uma grelha, faça
fplot('sinus', [0 50], 200); grid;
Noutros exercícios utilizaremos também a instrução plot para ver outro tipo de gráficos.
Sugestão: na janela de comandos do Matlab, faça
help fplot
help plot
e veja as diferenças.
________________________________________________________________________
Exercício 2
O estudo do comportamento dinâmico dos sistemas é feito a partir do modelo matemático.
Este modelo consiste em equações diferenciais que relacionam as variáveis de de saída com
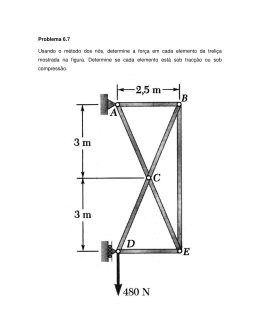
as entradas do sistema. Como exemplo, considere-se o circuito eléctrico da Fig. 2.1. Este
circuito pode ser considerado como um sistema SISO cuja entrada é a tensão VI e cuja saída
é a tensão vC.
1
S
R
VI
C
v
C
R = 1000 Ω
C = 0,1 µF
VI = 10 V
i
VI
circuito
RC
v
C
Fig. 2.1
Pretende-se saber qual é a evolução de vC, no tempo, após o fecho do interruptor S. A
resposta é obtida resolvendo a equação diferencial que rege o circuito:
dvC
1
1
vC +
VI
=−
dt
RC
RC
(2.1)
1) Com os dados do problema, determine vC(t), matematicamente, a partir de (2.1);
2) Utilize o programa MATLAB, com o Control Toolbox, para visualizar a curva de vC(t) .
Crie ficheiro rc.m:
% programa RC.m;
a=-1/tau;
b=-a;
t=0:tau/10:5*tau; % escala dos tempos
step(a,b,VI,0,1,t); % evolução de vc(t)
grid;
end
Compare com o resultado matemático da 1).
3) Explique as instruções do programa (faça help step na janela de comandos do Matlab).
4) Para a resolução numérica de equações diferenciais pode-se usar a instrução ODE23 (ou
ODE45 - veja as diferenças usando o help) do Matlab. Tendo em conta que, com os dados
do circuito, a equação (2.1) é igual a
dvC
= −10000vC + 100000
(2.2)
dt
em vez do programa anterior usa-se agora ODE23 para resolver (2.2). Para isso deve-se
fazer o seguinte:
1º - Criar, e gravar, um ficheiro vc.m com as seguintes instruções:
function dxdt=vc(t,x)
dxdt=-10000*x+100000;
2º - Criar, e gravar, um ficheiro RC2.m com as seguintes instruções:
% programa RC2m - trabalha com o ficheiro vc.m
t0=0; % instante inicial
2
tf=5e-4; % instante final
x0=0; % condições iniciais
[t,x]=ode23('vc',t0,tf,x0); % resolução da equação (2)
plot(t,x);grid; % ver o gráfico
3º - Na janela de comandos do Matlab dar a instrução
rc2.
5) Veja os resultados e compare os dois programas. Utilize outros valores para R e C e corra
o(s) programa(s) depois de modificados.
________________________________________________________________________
Exercício 3
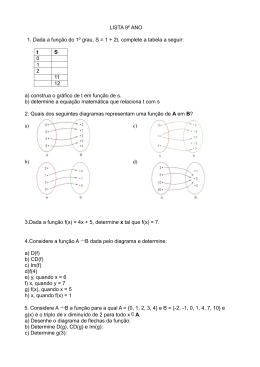
Circuito R, L, C, série
Um exemplo de um sistema eléctrico de segunda ordem é o circuito da Fig. 3.1 que tem o
seguinte modelo matemático:
u = LC
d 2v
dt2
+ RC
dv
+v
dt
(3.1)
L
R
i
u
C
v
Fig. 3.1
1) Escreva (3.1) sob a forma de um modelo de estado;
2) Utilize o programa MATLAB para visualizar as curvas de i(t) e v(t) . Crie ficheiro rlc.m:
% dados da Fig. 3.1
R=1;
L=2e-6;
C=0.10e-6;
U=10;
p=[L*C R*C 1]; % polinómio característico
% raízes de p
roots(p)
% Modelo de estado (eq. 2.60 das folhas);
A=[-R/L -1/L;1/C 0];
B=[1/L;0];
% a saída é a tensão no condensador
C=[0 1];
D=0;
t=0:1.5e-7:15e-6; % escala dos tempos
% gráficos, após ligar o circuito
[y,x]=step(A,B,C,D,1,t);
subplot(211);plot(t,U*y);grid;
subplot(212);plot(t,U*x);grid;
end
3) Modifique o programa RLC.m para visualizar as curvas de i(t) e v(t) para os seguintes
valores da resistência (em Ω): R=0, R=0,05, R=0,1, R=0,5 e R=2. Para cada um destes
3
valores relacione as raízes da equação característica com os diagramas temporais de i(t) e
v(t). Tire conclusões.
________________________________________________________________________
Exercício 4
Funções de transferência
1) A partir de (3.1) escreva a função de transferência V(s)/U(s) para
R=0,1 Ω
L=2e-6 H
C=0.10e-6 F
2) Utilizando o Matlab, obtenha a resposta v(t) a um escalão de u(t). Para isso crie um
ficheiro exerc_4.m:
R=0.1;
L=2e-6;
C=0.10e-6;
% função de transferência
num=1/L/C;
den=[1 R/C 1/L/C]
% pólos
roots(den)
% resposta ao escalão
step(num,den)
end
3) Resolva matematicamente o problema e compare os resultados.
4) Pode ver simultaneamente as curvas de v(t) para diferentes valores de R. Para isso pode
modificar o programa anterior:
%Programa 'exerc_4.m'
t=0:1e-8:1e-5;
L=2e-6;
C=0.10e-6;
num=1/L/C;
hold;
for R=0:0.1:0.8,
den=[1 R/C 1/L/C];
step(num,den,t);
end;
grid;
hold;
Corra este programa e tire conclusões.
________________________________________________________________________
Exercício 5
Diagramas de Bode
O programa Matlab, com o Control Toolbox, permite obter os diagramas de Bode de
qualquer função de transferência. Considere-se a função de transferência V(jω)/U(jω) do
circuito RLC série.
1) Crie o programa exerc_5.m:
%Programa 'exerc_5.m'
R=0.1
4
L=2e-6;
C=0.10e-6;
num=1/L/C;
den=[1 R/C 1/L/C];
bode(num,den);
2) Corra o programa para diferentes valores de R e tire conclusões;
3) Modificando o programa exerc_5.m pode-se obter os diagramas de Bode para qualquer
valor de R, sem ter de alterar o ficheiro. Para isso, usa-se a instrução function na primeira
linha do programa exerc_5.m:
function repfreq(R)
%escala de frequências: de 10^5 rad/s a 10^8 rad/s
w=logspace(5,8);
L=2e-6;
C=0.10e-6;
num=1/L/C;
den=[1 R/C 1/L/C];
roots(den)
figure;
bode(num,den,w);
Depois de gravar o ficheiro, para R=0,1 Ω corra o programa introduzindo na linha de
comandos a seguinte instrução exerc_5(0.1). Obtenha os diagramas de Bode para outros
valores de R∈[0, 1].
4) Relacione os diagramas de Bode com os pólos da função de transferência. Relacione,
nomeadamente, os máximos e os declives do diagrama das amplitudes e a fase com os pólos
complexos e reais e o regime, periódico ou não, de v(t) perante a entrada escalão.
________________________________________________________________________
Exercício 6
Diagramas de Nyquist
O programa Matlab, com o Control Toolbox, permite obter o diagrama de Nyquist de
qualquer função de transferência. Considere-se a função de transferência V(jω)/U(jω) do
circuito RLC série.
1) Crie o programa exerc_6.m:
function nyqui(R)
L=2e-6;
C=0.10e-6;
num=1/L/C;
den=[1 R/C 1/L/C];
figure;
nyquist(num,den);
2) Corra o programa para diferentes valores de R (com, por exemplo, exerc_6(0.1)) e tire
conclusões. Compare com os diagramas de Bode respectivos.
Exercício 7
Diagrama de Evans (Root-Locus)
5
O programa Matlab, com o Control Toolbox, permite obter o diagrama de Evans ou lugar
geométrico das raízes da equação característica a partir de qualquer função de transferência
em cadeia aberta. Pretende-se estudar a estabilidade de um sistema com a seguinte função de
transferência em cadeia aberta:
K
G ( s) =
s( s + 20)( s + 4 )
1) Manualmente, trace o diagrama de Evans para K>0. Compare-o com o que se obtém
seguidamente.
2) Crie o programa exerc_7.m:
% exercício 7
num=1;
% factores do denominador
d1=[1 0];
d2=[1 4];
d3=[1 20];
% cálculo do polinómio denominador
d12=conv(d1,d2);
den=conv(d12,d3)
rlocus(num,den);
2) Corra o programa e tire conclusões quanto à estabilidade do sistema em cadeia fechada.
3) Determine o valor crítico de K (valor de K a partir do qual o sistema em cadeia fechada
torna-se instável. Para isso, com a janela gráfica do root-locus aberta, escreva o seguinte
comando na janela do Matlab:
[K,P] = rlocfind(num,den)
Posicione o cursor numa das raízes sobre o eixo imaginário e click com o rato. Registe os
resultados. (Nota: faça help rlocfind para compreender este comando).
4) O sistema tem realimentação unitária e negativa. verifique que a função de transferência
em cadeia fechada é
K
F ( s) =
s( s + 20)( s + 4 ) + K
Pelo critério de Routh, determine valor de K a partir do qual o sistema em cadeia fechada
torna-se instável. Compare com o valor determinado na 3).
5) Para determinar o denominador de F(s) pode dar o seguinte comando no Matlab:
denf=den+[0 0 0 K] (K é o valor determinado em 3) ou em 4)).
Para calcular as raízes de denf faça roots(denf). Tire conclusões.
6) Admitindo que a realimentação é unitária e negativa, para um dado valor de K, pode obter
a função de transferência em cadeia fechada com o seguinte comando no Matlab (com o
Control Toolbox):
[numf,denf] = cloop(K*num,den,-1)
Nota: faça help cloop para compreender este comando
Exercício 8
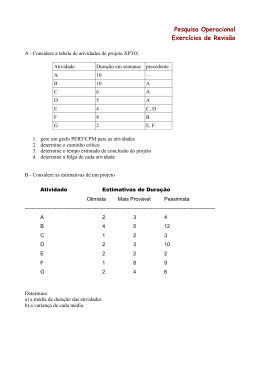
Considere um sistema caracterizado pelo diagrama de blocos da Fig. 8.1 e com o auxílio do
Matlab resolva as seguintes questões:
6
R(s)
+
+
G ( s) =
C(s)
G(s)
-
K
s ( s + 1)( s + 4)
Fig. 8.1
1) Determine o Root-Locus do sistema dado.
2) Determine as respostas c(t) ao escalão unitário de r(t) para os seguintes valores de K:
2.1. K= 0.5
2.2. K= 5
2.3. K= 25
2.4. K= 50
3) Obtenha o valor de K crítico.
4) Determine as respostas em frequência de G(s) nos casos 2.2 e 2.4. Compare os resultados
com os diagramas de Bode assintóticos.
5) Obtenha a função de transferência em cadeia fechada.
6) Estude a estabilidade do sistema dado a partir dos diagramas de Nyquist.
7) Estabilize o sistema, para qualquer K>0, com a conveniente adição de um zero a G(s).
_______________________________________________________________________
Exercício 9
Obtenha um modelo analógico do sistema dado. Repita 2 utilizando o programa PSPICE.
Com o PSPICE obtenha a resposta em frequência G(jω) para K=1.
___________________________________________________________________
Exercício 10
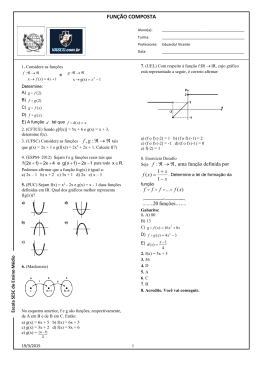
Considere o sistema da Fig. 10.1 e com o auxílio do Matlab responda às seguintes questões
(utilize as instruções series, feedback, cloop, residue, e outras, do Control Toolbox):
2
s+1
R(s)
U(s)
K
+
Y(s)
+
-2
s+5
Fig. 10.1
1) Determine a função de transferência G(s)=Y(s)/U(s) .
2) Determine a função de transferência em cadeia fechada F(s)=Y(s)/R(s) .
3) Decomponha a função de transferência da 2) em fracções parciais
4) Determine a resposta y(t) para uma entrada r(t) de tipo escalão unitário.
5) Qual é a influencia de K na exactidão do sistema à entrada escalão? Determine K para que
o erro seja inferior a 5%.
6) Desenhe os diagramas de Bode de G(s) para K=2.
7) Determine o módulo em db e a fase de G(s) para a frequência de 50 Hz , para K=2.
8) Determine o ganho em baixa frequência de F(jω), para K=2.
9) Trace o Root-Locus do sistema e analise o comportamento dinâmico.
7
10) Determine K para que o amortecimento de y(t) seja γ=0.6. Nestas condições, determine a
frequência das oscilações amortecidas. Obtenha a resposta à entrada escalão.
11) Desenhe o diagrama de Nyquist de G(s). Conclua quanto à estabilidade do sistema da
figura.
_______________________________________________________________________
Exercício 11
Na Fig. 11.1 está representado o modelo electrónico de um dado sistema (A2) com
realimentação (A3) unitária e um regulador P(s) (A1).
R2
C1
R4 6,8K
V1
R1
C2
R3
R6
10K
3,3nF
R5
A1
A2
10K
R7
A3
Vout
Fig. 11.1
1) Pretende-se projectar o regulador, isto é, determinar R1, R2, R7 e C1, de tal forma que se
verifiquem, tanto quanto possível, os seguintes requisitos:
a) a resposta seja exacta à entrada em escalão;
b) o erro à entrada rampa seja inferior a 5%;
c) a sobreelevação (se existir) seja inferior a 10%;
d) a resposta deve ser o mais rápida possível;
Projecte o regulador para que estes requisitos sejam cumpridos.
2) Simule o sistema no PSPICE e utilize o programa na resolução do problema (o programa
junto pode ser usado para simular os amplificadores operacionais).
3) Confirme a solução final através do programa MATLAB e utilize este programa para
completar o trabalho. Compare os resultados do PSPICE e do MATLAB.
Apresente um pequeno relatório com as opções tomadas, os resultados a que chegou e as
conclusões finais. O relatório incluirá o estudo teórico do sistema, nomeadamente:
1. O modelo do sistema sob a forma de um diagrama de blocos com as respectivas funções de
transferência.
2. Resultados da simulação com um regulador proporcional: P(s)=K (K>0).
3. Diagramas de Evans (Root-Locus).
4. Diagramas de Bode e de Nyquist.
5. Estudo analítico da estabilidade e da exactidão.
6. Respostas vy(t) para as entradas escalão e rampa (resultados teóricos e simulados).
*AMPOP
*Circuito para simular AMPOP's
.SUBCKT AMPOP 8 1 7
exemplo:
8
X1 2 5 4 AMPOP
* 8-NO DA ENTRADA INVERSORA
* 1-NO DA ENTRADA NAO INVERSORA
* 7-NO DA SAIDA
RA 1 4 5MEG
RB 4 3 1MEG
RC 3 8 5MEG
EAO 6 0 4 3 3.5E5
R0 6 7 75
CIN 4 3 1.7NF
.ENDS
______________________________________________________________________________________
Exercício 12
Um sistema de controlo de posição angular, em cadeia fechada, é representado pelo seguinte
diagrama de blocos:
R(s)
C(s)
U(s)
E(s)
P(s)
+
G(s)
-
10
G(s)=
s 2 +10s+20
onde G(s) representa o sistema de posicionamento e P(s) o regulador de posição.
1. O objectivo principal do trabalho consiste em definir P(s) de modo que sejam atingidos os
seguintes requisitos:
A.1. O sistema deve ser exacto à entrada escalão.
A.2. A sobreelevação de c(t) não pode exceder 10%.
A.3. A frequência das oscilações deve ser inferior a 3 rad/s.
2. Plano de trabalho
2.1. Começe por estudar o comportamento do sistema quando o regulador é de tipo
proporcional: P(s)=Kp , com Kp>0 .
Trace o Root-Locus do sistema.
Determine Kp para que seja verificado 1.2. Determine a frequência das oscilações para o caso
limite da sobreelevação de 10%.
Com base nos resultados anteriores, seleccione Kp de modo que se verifique também 1.3.
Determine o erro estático de posição e obtenha a resposta c(t) à entrada escalão unitária para
o valor de Kp seleccionado.
Comente os resultados e refira-se à estabilidade do sistema.
2.2. Pensa-se que a inclusão de um regulador P(s) de tipo proporcional e integral seja
vantajoso para o controlo do sistema em causa.
K
s+ I
Kp
,
Kp>0, KI>0
P(s)= Kp + KI / s = K p
s
Verifique a evolução do Root-Locus do sistema em função de a=Kp/KI.
Repita a análise proposta no ponto 2.1.
9
Selecione os valores de Kp e KI que lhe pareçam convenientes para as especificações do
ponto 1.
Comente os resultados e analise a estabilidade do sistema.
3. Determine um diagrama de blocos temporal completo para o sistema final e obtenha a
resposta simulada c(t) a uma entrada escalão através do programa MATLAB.
4. Determine o erro estático de c(t) a uma entrada rampa r(t)=t, com o regulador genérico
(2). Verifique que este erro existe sempre e que é função de KI.
Para a resolução do problema de controlo proposto, pode-se impôr uma especificação
adicional : O erro de c(t) a uma entrada rampa deve ser inferior a 5%.
Determine os valores de Kp e KI para este caso.
Comente os resultados e obtenha a resposta simulada de c(t) à entrada rampa unitária.
5. Considere agora que o sistema deve cumprir os seguintes requisitos:
B.1. O sistema deve ser exacto à entrada escalão.
B.1. A margem de fase deve ser 45º e a margem de ganho deve ser pelo menos 6 dB.
Repita os pontos 2,3 e 4, com as necessárias adaptações, projectando um regulador que
satisfaça os requisitos B.
Apresente a resolução destes problemas sob a forma de um pequeno relatório organizado,
com a inclusão dos dados e das curvas que considere relevantes.
________________________________________________________________________
Exercício 12
1. Considere o sistema da Fig. 12.1:
a) Trace o Root-Locus e analise o comportamento dinâmico do sistema da figura.
b) Determine K para que os pólos da cadeia fechada imponham um amortecimento ζ=0,5.
C(s)
R(s)
+
G(s)
G(s)=
K
K>0
20
s(s+100)
Fig. 1
c) Determine resposta c(t) para uma entrada r(t) do tipo escalão unitário. Esboce a curva.
d) Determine os erros estáticos às entradas escalão e rampa. Verifique se K influencia esses
valores.
e) Desenhe os diagramas de Nyquist e os de Bode para a FTCA.
Exercício 13
Considere um sistema com rectroacção negativa unitária cuja função de transferência em
cadeia aberta é:
1000
G ( s) H ( s ) =
s( s + 100)( s + 20)
10
a) Desenhe um diagrama de blocos para este sistema e determine a resposta temporal do
sistema em cadeia fechada a uma entrada impulso unitário.
b) Demonstre que este sistema não é exacto a uma entrada rampa. Determine o erro estático
correspondente.
c) O sistema será controlado por um regulador proporcional de ganho K. Trace o RootLocus do sistema, apresentando os cálculos necessários.
d) Determine a gama de valores de K para os quais o sistema é estável.
e) Desenhe o diagrama de Nyquist de G(jω)H(jω). Estude a estabilidade do sistema quando
se introduz o regulador proporcional.
f) Seja K=1. Determine as margens de ganho e de fase.
g) Determine K para que a margem de ganho seja de 6 dB.
________________________________________________________________________
Exercício 14
Um sistema é modelado pelo seguinte diagrama de blocos:
R(s)
U(s)
E(s)
P(s)
Y(s)
G(s)
8
G ( s) = 2
s + 13s + 30
Fig. 13.1
a) Seja P(s)=K. Determine a resposta y(t) para uma entrada r(t) escalão unitário e determine
o erro estático.
b) Seja P(s)=K(s+10)/s .Desenhe o Root-Locus.
c) Analise o comportamento dinâmico do sistema e a estabilidade em função de K.
Determine K para que o sistema não tenha modos oscilatórios.
d) Seja P(s)=K(s+20)/s. Determine K para que o erro de c(t) a uma entrada rampa seja
inferior a 2%.
e) Determine as margens de ganho e de fase nas condições da d).
________________________________________________________________________
Exercício 15
Considere o sistema da Fig. 13.1 com P(s)=10/s.
a) Desenhe os diagramas de Bode da FT em cadeia aberta.
b) Determine as margens de ganho e de fase.
c) Determine o ganho, em dB, para f=1,2 kHz.
d) Analise a estabilidade do sistema pelo critério de Nyquist.
________________________________________________________________________
Exercício 16
Com o auxílio do Matlab e do PSPICE, obtenha as respostas em frequência dos seguintes
reguladores:
U ( s) s + 20
U ( s) ( s + 20)( s + 1)
=
b)
=
a)
E ( s)
s
E ( s)
s
c)
U ( s)
s + 10
=
E ( s) s( s + 1)
d)
U ( s)
s +1
= 10
E ( s)
s + 10
d)
U ( s)
s + 10
= 10
E ( s)
s +1
e)
11
U ( s)
s + 10
=
E ( s) s( s + 1)( s + 20)
________________________________________________________________________
Exercício 17
Considere o sistema da Fig. 13.1 com P(s)=K(s+A)/s.
Determine K e A para que a margem de ganho seja de 10 dB e a margem de fase seja igual
a 40º.
________________________________________________________________________
Exercício 18
Um sistema com rectroacção negativa unitária tem a seguinte função de transferência em
cadeia aberta:
K
G ( s) =
, com 0 < K < 15
( s + 3)( s + 1)
Pretende-se que a resposta, em cadeia fechada, a uma entrada escalão seja tão exacta quanto
possível e tenha um coeficiente de amortecimento ξ=0,5. Estude a possibilidade de incluir um
pré-compensador com a função de transferência
P ( s ) = P0
1 + τ1s
1 + τ2s
a) Projecte o compensador e determine analiticamente a resposta do sistema ao escalão
unitário.
b) Determine as margens de ganho e de fase com o compensador incluído.
c) Determine a resposta em frequência da função de transferência em cadeia fechada.
Determine o ganho em baixa frequência e relacione o resultado com o erro estático à
entrada escalão. Determine a largura de banda.
d) Resolva o problema substituindo o pré-compensador por um regulador proporcional e
integral (PI). Comente as diferenças detectadas.
Utilize o programa MATLAB para confirmar os resultados. Desenhe o circuito electrónico
do regulador P(s) e simule os resultados com o PSPICE.
Exercício 19
Um sistema tem a seguinte função de transferência :
2
G( s) =
( s + 3)(s + 1)
Este sistema vai ser controlado através da RLVE.
a) Obtenha um modelo de estado para o sistema. Classifique-o quanto à controlabilidade e à
observabilidade.
b) Estabeleça a lei de controlo por RLVE e desenhe o respectivo diagrama de blocos.
c) Determine a lei de controlo para que os pólos em cadeia fechada sejam –10 e -2.
d) Modifique a lei anterior para que o sistema seja exacto à entrada escalão.
Exercício 20
Repita o problema 19(d) mas com a inclusão de um integrador na cadeia de acção.
Determine a lei de controlo e desenhe o respectivo diagrama de blocos. Simule o sistema no
Matlab.Obtenha as margens de ganho e de fase.
12
Problemas – Cap. 9
Resolva analiticamente estes problemas e confirme os resultados mais relevantes com o
programa Matlab.
1. Um sistema discreto é descrito pelo seguinte modelo de estado:
1
0
0
x(n + 1) =
x ( n) + u ( n)
− 0.03 α
1
y ( n) = 1 1 x( n)
Seja α=0,4.
n=2
, determine x(3) e y(3).
n≠2
1,
a) Sendo x1(0)=x2(0)=0,5 e u (n) =
0,
b) Determine Y(z)/U(z).
c) Transforme o resultado da b) numa equação às diferenças e determine y(4) quando
n=2
.
n≠2
1,
x1(0)=1, x2(0)= - 0,5 e u (n) =
0,
d) Caracterize a estabilidade do sistema dado em função de α e indique o intervalo de estabilidade.
2. Considere o sistema amostrado da figura P.2.
E(s)
1- e-sT
T=0.1s
s
U(s)
2
C(s)
0.5 s + 1
Figura P.2
a) Determine C(z)/E(z).
b) Determine c(nT) para uma entrada e(t) escalão unitário.
c) Determine o valor estacionário de c(nT) nas condições da b).
d) Obtenha um modelo de estado discreto e determine os valores próprios da matriz do
sistema.
3. Considere um sistema modelado pela seguinte equação às diferenças:
y ( n + 1) − 1, 8 y ( n) + 0, 8 y (n − 1) = 0. 6 u ( n + 1)
(1)
a) Determine Y(z)/U(z) e represente a equação (1) sob a forma de um diagrama de blocos
com realimentação unitária negativa.
b) Para uma entrada u(n) do tipo escalão unitário, determine y(n) por transformada Z inversa.
13
c) Obtenha um modelo de estado para (1).
d) Determine os três primeiros valores das séries temporais (n=1, 2, 3) do vector de estado
X(n) nas seguintes condições:
, n par
1
u ( n) =
0 , n impar
0.5
X(0) =
0
4. Um sistema com rectroacção unitária negativa tem a seguinte função de transferência em
cadeia aberta:
G( z) = K
0, 1 z − 0, 02
( z − 0. 9 ) ( z + 0, 5)
a) Estude a estabilidade do sistema em cadeia fechada, em função de K.
b) Diga, justificando, se o sistema pode ter modos oscilatórios.
c) Decomponha G(z) em fracções parciais e desenhe o correspondente diagrama de blocos.
5. Considere o seguinte modelo de estado:
1
0
0
x(n + 1) =
x (n) + u (n)
0,32 − 0,4
1
y (n) = 1 0 x (n)
a) Torne o sistema diagonal por transformação de semelhança.
b) Caracterize o sistema quanto à observabilidade e à controlabilidade.
c) Determine Y(z)/U(z).
d) Para uma entrada impulso unitário, determine os primeiros 5 valores de y(n) por divisões
sucessivas.
e) Determine uma lei de controlo por RLVE que torne o sistema exacto para uma entrada escalão
unitário e sem modos oscilatórios.
f) Repita a a) por decomposição de Y(z)/U(z). em fracções parciais. Desenhe o diagrama de
blocos correspondente e determine o novo modelo de estado.
6. Considere o seguinte modelo de estado de um sistema contínuo no tempo:
14
1
0
0
x& (t ) =
x (t ) + u (t )
− 16 − 10
1
y(t ) = 1 0 x(t )
a) Com a correcta escolha de uma frequência de amostragem, discretize o modelo de estado
contínuo.
b) Determine as funções de transferência X1(z)/U(z) e X2(z)/U(z).
7. Considere o seguinte modelo de estado de um sistema discreto:
0 1
0
x(n + 1) =
x (n) + u (n)
− 1 1
1
O controlo será feito através de RLVE, com u(k)=-Gx(k), em que G=[g1 g2].
a) Caracterize o sistema quanto à controlabilidade.
b) Determine o intervalo dos valores de g1 e g2 para que o sistema seja estável em cadeia fechada.
c) Desenhe o gráfico de g2=f(g1) e delimite a região estável.
8. Um sistema com rectroacção negativa unitária tem a seguinte função de transferência em
cadeia aberta:
G( s) =
Y ( s)
K
=
e K>0
U ( s ) ( s + 3)(s + 1)
a) Com a correcta escolha de uma frequência de amostragem, obtenha um modelo de estado
discreto.
b) Determine as funções de transferência X1(z)/U(z) e X2(z)/U(z).
c) Obtenha a resposta y(nT) para uma entrada escalão discreto.
d) Analise a resposta anterior para diferentes valores de K e de T.
15
Baixar