Análise Complexa e Equações Diferenciais
2o Exame - 29 de Janeiro de 2009
LEAmb, LEMat, MEBiol e MEQ
Resolução
1.
1
2
4
i
−1i
1i
2
−2i
1i
4
1
4
1
2
1
−4i
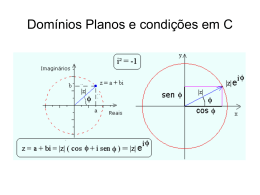
Os planos z e 1z .
A imagem da recta que passa na origem é uma recta que passa na origem,
porque se a original passa em zero a imagem passa em infinito, e se a original
passa em infinito a imagem passa em zero. Como os os argumentos dos
, os argumentos dos pontos não
pontos não nulos da recta original são π4 e 5π
4
π
5π
nulos da recta imagem são − 4 e − 4 .
A imagem da circunferência que passa na origem é uma recta, porque se
o original passa em zero a imagem passa em infinito. Como a circunferência
original passa em 14 e 4i , a recta imagem passa nos inversos, 4√ e −4i. O
ponto da circunferência original mais distante da origem fica a 42 unidades
de comprimento,
√ portanto o ponto da recta imagem mais perto da origem
4
fica a √2 = 2 2 unidades de comprimento.
A imagem da recta que não passa na origem é uma circunferência, porque
se a original não passa em zero a imagem não passa em infinito. Como a recta
original passa em infinito, a circunferência imagem passa na origem. Como
a recta original passa em 1 e i, a circunferência imagem passa
em 1 e −i.
√
O ponto da recta original mais próximo da origem fica a 22 unidades de
comprimento, portanto
√ o ponto da circunferência imagem mais distante da
origem fica a √22 = 2 unidades de comprimento.
Finalmente, a imagem da circunferência que não passa na origem é uma
circunferência, porque se o original não passa em zero a imagem não passa
em infinito. Os pontos da circunferência original mais perto e mais distante
2
Resolução do exame de ACED - 29.1.09
√
√
da origem ficam a 42 e 22 unidades de comprimento, portanto os pontos da
√ √
circunferência imagem mais distante e mais perto da origem ficam a 2 2 e 2
unidades de comprimento, respectivamente. Como a circunferência original
é simétrica em relação à bissectriz do primeiro quadrante, a circunferência
imagem é simétrica em relação à bissectriz do quarto quadrante.
2.
a) Seja D := {z ∈ C : 0 < ℜz < 2π, 0 < ℑz < 2π} o domı́nio de f .
A função f tem derivadas parciais contı́nuas, pelo que é diferenciável
como função de ]0, 2π[2 em R2 . Portanto f é diferenciável no sentido
complexo nos pontos em que satisfaz a equação de Cauchy-Riemann:
fx = −ify ⇔ 1 − i cos x = −i(cos y + i) = 1 − i cos y ⇔ cos x = cos y.
Atendendo a que tanto x como y pertencem a ]0, 2π[, esta condição é
equivalente a
x = y ∨ y = 2π − x.
Logo, f é diferenciável em
{z ∈ D : ℜz = ℑz ∨ ℑz = 2π − ℜz}.
Nos pontos de diferenciabilidade, a derivada de f é f ′ (x + iy) = fx (x +
iy) = 1 − i cos x.
b) Tem-se
f x + i π2 = (x + 1) + i π2 − sin x ,
f (x + iπ) = x + i(π − sin x),
f (π + iy) = (π + sin y) + iy.
2πi
3π i
2
πi
πi
2
π
2
π
3π
2
2π
3
Resolução do exame de ACED - 29.1.09
c) Tem-se fx π + i π2 = 1 + i e fy π + i π2 = i. Por outro lado, fx (π +
iπ) = 1 + i e fy (π + iπ) = −1 + i. O ponto π + iπ é um ponto de
diferenciabilidade de f . Neste ponto |fx | = |fy | e argfy = argfx + π2 . O
ponto π + i π2 não é um ponto de diferenciabilidade de f .
3.
Z
iπ
π
1
+ eiz
z
iπ
log z − ieiz π
dz =
π
π
−π
iπ
−π
−e −1 .
= ln π + i − ln π − ie + ie = i
2
2
4.
a) Tem-se
f (z) :=
(z 2
1
1
=
g(z),
2
− 1)
(z − 1)2
com g(z) =
1
.
(z + 1)2
Ora
2
2·3
, g ′′ (z) =
,
3
(z + 1)
(z + 1)4
e facilmente se prova por indução que
g ′ (z) = −
g (k) (z) = (−1)k
(k + 1)!
.
(z + 1)k+2
. O desenvolvimento de g em série de
Assim, g (k) (1) = (−1)k (k+1)!
2k+2
Taylor em torno do ponto 1 é
g(z) =
∞
X
g (k) (1)
k=0
k!
∞
X
k+1
(z − 1) =
(−1)k k+2 (z − 1)k .
2
k=0
k
Este desenvolvimento é válido em {z ∈ C : |z − 1| < 2} porque este é
o maior disco aberto centrado em 1 e contido na região de holomorfia
de g. Conclui-se
∞
X
k+1
(−1)k k+2 (z − 1)k−2
f (z) = (z − 1) g(z) =
2
k=0
−2
∞
X
1
k+1
1
−
+
(−1)k k+2 (z − 1)k−2 ,
=
2
4(z − 1)
4(z − 1)
2
k=2
para z em {z ∈ C : |z − 1| < 2}. A função f tem um pólo de segunda
ordem em z = 1.
Resolução do exame de ACED - 29.1.09
4
R
b) Para calcularmos |z−1|=1 f (z) dz basta integrarmos a série de Laurent
1
da alı́nea anterior. O integral de 4(z−1)
2 é zero pelo Teorema Fundamen1
tal do Cálculo porque esta função é a derivada de − 4(z−1)
. O integral
da série de potências de z − 1 é zero pelo Teorema de Cauchy porque
a série de potências é uma função holomorfa em {z ∈ C : |z − 1| < 2}.
Logo,
Z
Z
1
1
πi
f (z) dz = −
dz = − 2πi = − .
4
2
|z−1|=1
|z−1|=1 4(z − 1)
5.
a) O polinómio caracterı́stico é λ2 + 2λ
=λ(λ + 2) pelo que os valores
1
próprios são 0 e −2. O vector v1 = 1 é próprio associado a 0, e o
1
vector v2 = −1 é próprio associado a −2. Assim,
1
1
−1
1
1
1
0
0
1
1
√
=√
= SΛS −1 .
1 −1
0 −2
2 1 −1
2 1 −1
A solução geral do sistema do enunciado é
1
x0
1
1
1 0
Λt −1
X(t) = Se S X0 = [v1 v2 ]
y0
1 −1
0 e−2t
2
1
x0 + y0
=
[v1 e−2t v2 ]
x0 − y0
2
1
1
x0 −y0 −2t
x0 +y0
.
+ 2 e
=
2
−1
1
b) Começamos por restringir a nossa atenção aos espaços próprios. O vector associado a X = v1 é AX = Av1 = λ1 v1 = 0. De igual modo o
vector associado a X = v2 é AX = Av2 = λ2 v2 = −2v2 . Seja c ∈ R.
Mais geralmente, o sistema associa a X = cv1 o vector λ1 cv1 = 0 e a
X = cv2 o vector λ2 cv2 = −2cv2 . Imaginemos uma partı́cula que na
posição X tem a velocidade X ′ = AX. Se a partı́cula começar numa
posição pertencente ao espaço próprio associado a v1 , então a partı́cula
vai permanecer em repouso, porque a velocidade da partı́cula é nula.
Se a partı́cula começar numa posição pertencente ao espaço próprio associado a v2 , então a partı́cula vai manter-se sobre esse espaço próprio,
porque a velocidade da partı́cula também pertence ao espaço próprio
associado a v2 e vai mover-se em direcção à origem. Para uma partı́cula com uma posição inicial genérica X0 decompomos X0 na base dos
5
Resolução do exame de ACED - 29.1.09
vectores próprios da matriz. Quando o tempo aumentar, a componente
de X0 na direcção de v1 vai manter-se, enquanto a componente de X0
na direcção de v2 vai diminuir.
y
y
x
x
6.
a) Esboço do campo de direcções e dos gráficos das soluções.
y
y
t
t
b) A equação y ′ = ty 2 é separável:
y′
= t.
y2
Reconhecemos no primeiro membro a derivada de − y1 . Integrando ambos os membros de 0 a t e usando a condição inicial,
1
1
t2
2y0
d 1
=t ⇔ −
+
=
⇒ y(t) =
.
−
dt y
y(t) y(0)
2
2 − y0 t2
Esta expressão final também é válida para y0 = 0, embora os passos
intermédios não o sejam.
6
Resolução do exame de ACED - 29.1.09
c) Se y0 ≤ 0 as soluções são globais, ou seja estão definidas em R. Se
y0 > 0, então as soluções
q existem enquanto o denominador não se
anula, ou seja para |t| < y20 .
7.
a) A extensão ı́mpar de y é
−y(−t) para t ∈ [−l, 0[,
z(t) =
y(t) para t ∈ [0, l].
Com vista à prova de diferenciabilidade de z em zero, calculamos
y(t) − y(0)
z(t) − z(0)
= lim+
= y ′ (0),
t→0
t→0
t−0
t−0
−y(−t) + y(0)
y(s) − y(0)
z(t) − z(0)
= lim−
= lim+
lim−
t→0
s→0
t→0
t−0
t−0
s−0
= y ′(0).
lim+
Assim, z é diferenciável em zero e z ′ (0) = y ′(0). Portanto, derivada de
z é
′
y (−t) para t ∈ [−l, 0[,
′
z (t) =
y ′ (t)
para t ∈ [0, l].
Esta função é contı́nua em [−l, l] porque y ∈ C 1 [0, l]. Logo, z é de
classe C 1 .
b) Como z é ı́mpar, o desenvolvimento de z em série de Fourier é
z(t) =
com
2
bn =
l
Z
0
l
z(t) sin
∞
X
nπt bn sin
l
n=1
nπt l
2
dt =
l
Z
0
l
nπt dt.
y(t) sin
l
(1)
(2)
Esta série converge uniformemente para z porque a extensão periódica,
de perı́odo 2l, de z a R é uma função de classe C 1 (R). De facto, tal como
se verificou que z tem derivada contı́nua numa vizinhança de 0, pode
verificar-se que a extensão de z tem derivada contı́nua numa vizinhança
de l.
c) Em [0, l] as funções y e z coincidem pelo y é dada pelo lado direito
de (1) com os bn ’s como em (2). Integrando por partes, usando os
7
Resolução do exame de ACED - 29.1.09
factos de y(t) e sin
bn
se anularem em 0 e l, e −y ′′ = λy,
Z l
nπt nπt 2
′
dt =
dt
y(t) sin
y (t) cos
l
nπ 0
l
0
Z l
Z l
nπt nπt 2lλ
2l
′′
dt = 2 2
dt
y (t) sin
y(t) sin
= − 2 2
nπ 0
l
nπ 0
l
l2
= λ 2 2 bn .
nπ
2
=
l
Z
l
nπt
l
2 2
Há duas possibilidades. Ou bn = 0 ou λ = n l2π . Como por hipótese
y não é identicamente nula, deve existir algum n tal que esta segunda
igualdade se verifica. Claro que esta segunda igualdade apenas se po2 2
derá verificar para um valor de n. Assim, existe n ∈ N1 tal que λ = n l2π
e
nπt y(t) = c sin
, com c ∈ C \ {0}.
l
Baixar