Aspectos Elementares da Geometria de um Espaço Normado:
A definição de “ângulo” entre dois vetores
José Carlos CIFUENTES∗ Josué Ervin MUSIAL†
Chamemos de E um espaço vetorial real onde está definida uma distância d. Por simplicidade consideraremos
E = R2 . Uma distância vetorial em E será uma função
d : E × E −→ R
(a, b) 7−→ d(a, b),
onde d(a, b) é interpretada como a distância de a até b, satisfazendo:
i) d(a, b) ≥ 0;
ii) d(a, b) = 0 ⇔ a = b;
iii) d(a, b) = d(b, a);
iv) desigualdade triangular: d(a, b) ≤ d(a, c) + d(c, b);
v) invariância por translações: d(a + c, b + c) = d(a, b);
vi) homotetia: d(ta, tb) = |t|d(a, b), para t ∈ R.
Essas propriedades caracterizam uma norma em E através da fórmula ||x|| = d(x, 0). Na verdade, prova-se
que a noção de “norma” e a noção de “distância vetorial” são equivalentes. De fato, dada uma norma || . ||, a
distância vetorial correspondente é dada por d(x, y) = ||x − y||.
Exemplos em R2 são as p-normas: Seja p ∈ R, p ≥ 1, então, para x = (x1 , x2 ), define-se
1
kxkp = (|x1 |p + |x2 |p ) p .
Para p = 2 temos a norma Euclidiana, e para p = 1 temos a norma soma.
Por outro lado, todo produto interno determina uma norma e, portanto,
uma distância vetorial. Com efeito,
q
®
®
dado o produto interno . , . , definimos a norma mediante kxk =
x, x , como no caso Euclidiano.
Em contrapartida, nem sempre uma norma provém de um produto interno. Por exemplo, prova-se que para
p 6= 2, a p-norma
não
® provém de um produto interno.
A fórmula x, y = a(x1 y1 ) + b(x1 y2 + x2 y1 ) + c(x2 y2 ), para x = (x1 , x2 ) e y = (y1 , y2 ) e a > 0, c > 0 e
b2 ≤ ac, determina a forma geral de um produto interno em R2 . Então, podemos definir a norma correspondente
da seguinte maneira:
q
´ 12
® ³
kxk =
x, x = ax21 + 2bx1 x2 + cx22 .
Assim, podemos generalizar o conceito de “circunferência”. Fixemos uma norma k.k qualquer em R2 (ela
pode ou não provir de um produto interno). Nesse caso, a circunferência com centro na origem e raio r > 0 é
definida por
Cr = {x ∈ R2 ; kxk = r}.
Podemos escolher como centro a origem, pois a distância vetorial que essa norma determina, é invariante
por translações. Somos assim motivados a olhar para a noção de ângulo Euclidiano que “pode” ser definido
a partir da noção de distância Euclidiana. É o conceito de radiano que estabelece a relação ı́ntima entre
ângulo e distância. Por exemplo, na geometria grega o quociente entre o comprimento de arco s e o raio r da
circunferência é constante. Esse quociente define o valor do ângulo em radianos. Se chamamos de θ aquele
ângulo, podemos definir medida de θ = rs radianos.
Figura 1:
O quociente entre o comprimento da circunferência Euclidiana c e seu diâmetro d ou o quociente entre o
comprimento da semicircunferência e o raio, é a constante π(≈ 3, 1415962...).
∗ Professor
do Departamento de Matemática da Universidade Federal do Paraná - UFPR. E-mail: [email protected].
do Grupo PET/Matemática (Programa de Educação Tutorial) do Curso de Matemática da
E-mail: [email protected].
† Bolsista
UFPR.
O comprimento de um arco s de circunferência pode ser calculado através de uma integral, onde ainda a
noção de base é a distância entre dois pontos. Se z(t) = (x(t), y(t)) com a ≤ t ≤ b, então, o comprimento l é
dado por:
Z b
Z b
Z bp
l=
kz 0 (t)kdt =
k(x0 (t), y 0 (t))kdt =
x0 (t)2 + y 0 (t)2 dt,
a
a
a
onde k.k é a norma Euclidiana.
Pergunta:
Pode ser definido “ângulo” desse mesmo modo substituindo o distância Euclidiana por uma outra distância
vetorial qualquer?
Para responder a pergunta anterior, formularemos o nosso problema central em sua forma mais geral. Vimos
que no caso Euclidiano a definição de ângulo (em radianos) depende de serem satisfeitas duas condições:
i) A possibilidade de medir o comprimento de um arco de “circunferência”, e
ii) A constatação de que o quociente de um arco qualquer de circunferência ao raio (ou ao diâmetro)
correspondente é constante.
cr
Nesse caso, se d é uma distância vetorial, o valor π(d) será definido pelo quociente π(d) = 2r
, onde cr é o
c1
comprimento da circunferência toda. Em particular, π(d) = 2 (tomando r = 1).
O “comprimento” cr (para as diversas distâncias vetoriais) deve ser calculado através da integral dada acima
usando a norma correspondente.
Caso de uma Norma que Provém de um Produto
Interno
p
Vimos que a forma geral é dada por k(x, y)k = ax2 + 2bxy + cy 2 .
Nesse caso, a circunferência de centro O e raio r é dada por:
Cr = {(x, y) ∈ R2 ; ax2 + 2bxy + cy 2 = r2 },
cujo gráfico é uma elipse centrada em O.
Figura 2:
Por simplicidade suporemos b = 0 (se b 6= 0 a elipse é rotada). Observa-se que a elipse ax2 + cy 2 = r2 é
simétrica a respeito dos eixos x e y. Portanto, o comprimento cr da elipse toda, ou seja, da “circunferência” na
norma dada, é 4s onde s é o comprimento do arco correspondente ao primeiro quadrante.
Esse arco pode ser expresso através da seguinte parametrização: z(t) = ( √ra cost, √rc sent), t ∈ [0, π2 ], donde,
Z
π
2
s=
0
Z
kz 0 (t)kdt =
0
π
2
r
r
rπ
r
a(− √ sent)2 + c( √ cost)2 dt =
.
2
a
c
cr
Daı́ cr = 4s = 2πr, donde π(d) = 2r
= π o qual é o mesmo valor Euclidiano.
O resultado anterior significa que esta forma de medir ângulo a partir da norma coincide com a forma dada
pelo produto interno!
Caso em que a Norma não Provém de um Produto Interno
1
Aqui analisaremos somente o caso das p-normas k.kp (p ≥ 1) onde k(x, y)kp = (|x|p + |y|p ) p .
A “circunferência” de centro na origem e raio r é dada por:
Cr = {(x, y) ∈ R2 ; |x|p + |y|p = rp }.
Figura 3: (p = 1)
Observa-se que essa “circunferência” também é simétrica a respeito dos eixos x e y.
Nesse caso, o arco correspondente ao primeiro quadrante é dado através da função:
1
y = (rp − xp ) p , x ∈ [0, r].
Portanto,
1
z(t) = (t, (rp − tp ) p ), t ∈ [0, r],
daı́,
Z
r
s(r) =
Z
r
kz 0 (t)kp dt =
"
µ
1+
0
0
tp
r p − tp
¶p−1 # p1
dt.
Prova-se que I(r) = s(r)
r = s(1) = I(1).
Nestes termos, o valor π(d) correspondente, que denotaremos por πp é:
4s(1)
c1
=
=2
πp =
2
2
Z
1
"
µ
1+
0
tp
1 − tp
¶p−1 # p1
dt.
Uma das grandes dificuldades encontradas foi o cálculo do valor de πp , fixado um p ≥ 1, analiticamente.
Uma aproximação numérica para este valor foi dada através de um algoritmo que nos possibilitasse fazer este
cálculo computacionalmente.
Se p aumenta indefinidamente o valor de πp converge para 2, ressaltando ainda que para p = 1 temos π1 = 4
e para p = 2 temos π2 = π, neste último caso o mesmo valor que no caso Euclidiano.
Figura 4:
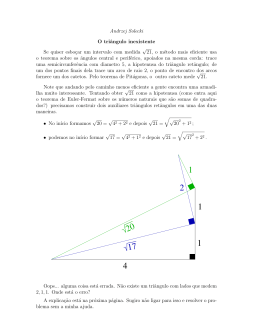
Um outro resultado importante, e que nos levou a uma surpresa, é o seguinte.
Definindo “reta” como no caso Euclidiano, isto é, como o lugar geométrico dos pontos que satisfazem uma
equação do 1◦ grau ax + by + c = 0, e considerando três pontos não colineares em R2 e três retas que passam
por estes pontos, temos que estas retas delimitam um triângulo. Daı́ resulta o seguinte:
A soma dos “ângulos internos” de um triângulo qualquer é igual ao valor de π(d) correspondente à norma
dada, o que pode ser visualizado pela figura abaixo:
Figura 5:
Na figura anterior, os ângulos α, β e γ do triângulo dado, são transladadas à origem usando a invariança
por translação da norma, e, no caso do ângulo β, usa-se a propriedade de ângulos opostos pelo vértice serem
iguais, decorrente da propriedade || − x|| = ||x|| da norma, para obtermos que α + β + γ = π(d), o valor de dois
ângulos retos na norma correspondente.
O teorema Euclidiano da soma dos ângulos internos de um triângulo ser igual a dois ângulos retos é satisfeito,
mesmo que a norma não seja a Euclidiana!
Baixar