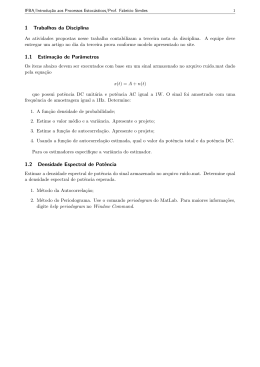
Anais do XX Congresso Brasileiro de Automática Belo Horizonte, MG, 20 a 24 de Setembro de 2014 SOLUÇÕES DO FLUXO DE POTÊNCIA COM RESTRIÇÕES DE INTERCÂMBIO LÍQUIDO DE POTÊNCIA ATIVA Sara Einsfeld∗, Roberto Salgado∗ ∗ UFSC / CTC/ EEL Laboratório de Sistemas de Potência Florianópolis, SC, Brasil Emails: [email protected], [email protected] Abstract— This work proposes a methodology to determine power flow solutions taking into account the constraints on the net interchange of active power between areas. These solutions are obtained by solving the set of nonlinear power flow equations, augmented by the analytical model of the active power interchange. At each iteration of the solution process through Newton-Raphson method, the general solution of an undetermined linear system is obtained. The load is modelled as constant power and the power flow equations are expressed in rectangular coordinates. Numerical results obtained with the IEEE 118-bus test system illustrate the features of the proposed methodology. power flow control, active power interchange, underdetermined linear system, rectangular coor- Keywords— dinates. Resumo— Este trabalho apresenta uma metodologia para a determinação de soluções do fluxo de potência considerando restrições de intercâmbio lı́quido de potência ativa entre áreas. Este problema é representado analiticamente por um conjunto de equações algébricas não lineares, no qual as equações do fluxo de potência convencional são complementadas com o modelo analı́tico das restrições de intercâmbio. As variáveis deste problema são selecionadas de tal forma que em cada iteração do processo de solução via método de NewtonRaphson, determina-se a solução geral do sistema linear subdeterminado. A carga é modelada como potência constante e as equações que representam a rede elétrica em regime permanente são expressas em coordenadas retangulares. Resultados numéricos com o sistema IEEE 118-barras ilustram as caracterı́sticas da metodologia proposta. Palavras-chave— Controle de fluxo de potência, intercâmbio de potência ativa, sistema linear subdeterminado, coordenadas retangulares. 1 Em geral, o estudo de transferência de potência requer a execução de três etapas fundamentais (Echavarren et al., 2011): 1) obtenção da solução do fluxo de potência para um caso base; 2) a pré-especificação da variação da carga e da área onde ela ocorre; e 3) a determinação da solução do fluxo de potência com a programação de intercâmbio incluı́da. Os métodos existentes na literatura para o Controle de Intercâmbio entre Áreas (CIA) baseiam-se geralmente em duas estratégias. A primeira consiste em alternar a aplicação de ajustes na geração de potência ativa com as soluções do fluxo de potência, até que o intercâmbio alcance o valor desejado. As relações de sensibilidade entre as variáveis do sistema de potência são utilizadas para estimar a correção da potência ativa gerada em cada área, nas barras previamente selecionadas para esta finalidade. Apesar desta técnica ser atrativa pela sua simplicidade, os ajustes na geração de potência ativa são calculados de forma indireta num processo de tentativaerro, o que pode demandar um considerável esforço computacional, sem garantir a determinação as melhores soluções em termos do nı́vel de potência gerada. A referência (Ibsais e Ajjarapu, 1996) aborda o problema do limite de intercâmbio de potência devido a restrições de estabilidade de tensão utilizando uma metodologia baseada na estratégia dos ajustes alternados e no fluxo de potência continuado. Busca-se o máximo fluxo de potência que pode ser estabelecido entre as áreas, sem causar problemas de estabilidade de tensão. A se- Introdução Sistemas de energia elétrica de grande porte geralmente são divididos em áreas conectadas por linhas de transmissão, através das quais é realizada a transferência de potência. Durante a operação desses sistemas, o suprimento de determinados nı́veis de carga em certas regiões é dificultado pela limitação da capacidade de geração no interior da própria área e/ou por restrições de transmissão em determinados elos de interligação. Por esta razão, é necessário identificar os nı́veis de carregamento para os quais a solução das equações do fluxo de potência é compatı́vel com as restrições de intercâmbio programado. No Brasil o Sistema Interligado Nacional (SIN) é operado de forma coordenada a fim de aproveitar ao máximo as diversidades das bacias hidrográficas do extenso território. Para viabilizar a transferência de energia entre estas diferentes regiões, com a consequente otimização dos recursos energéticos existentes, são utilizadas as interligações regionais, tornando assim o sistema elétrico mais robusto e aumentando significadamente a confiabilidade do atendimento às cargas. Os limites de intercâmbio juntamente com os pontos de operação do SIN são determinados pelo Operador Nacional do Sistema Elétrico (ONS). Porém, esta tarefa é realizada geralmente de forma manual, através de aplicativos de fluxo de potência convencional, o que requer frequentemente tempo de estudo e esforço computacional elevados. 2121 Anais do XX Congresso Brasileiro de Automática Belo Horizonte, MG, 20 a 24 de Setembro de 2014 critério de geração de potência ativa. A principal diferença da metodologia proposta com relação aquelas existentes na literatura (particularmente (Okamura et al., 1975; Santos et al., 2004; Carhuallanqui e Alves, 2012)) diz respeito a forma como os controles (potência ativa gerada nas barras reguladoras) são incluı́das na modelagem do problema de fluxo de potência com restrições de intercâmbio entre áreas. Usualmente os controles são selecionados em áreas distintas, de uma maneira tal que o número de equações do sistema não linear é igual ao número de variáveis. Além de restringir a região das soluções viáveis, isto aumenta o risco de inviabilidade da solução se os fluxos de intercâmbio não forem adequadamente especificados. Na abordagem apresentada aqui, a modelagem analı́tica dos controles é estabelecida de forma que o numero de variáveis é maior do que o número de incógnitas. Consequentemente, a aplicação do método de NewtonRaphson requer a solução de um sistema linear subdeterminado a cada iteração. Isto aumenta a região de viabilidade da solução e possibilita determinar nı́veis de geração de potência ativa com diferentes caracterı́sticas. O texto apresentado a seguir está organizado da seguinte forma: a Seção 2 descreve os fundamentos teóricos do problema de fluxo de potência com a inclusão dos intercâmbios programados; a Seção 3 descreve a metodologia proposta, incluindo os aspectos computacionais; os resultados numéricos da implementação computacional, obtidos com o sistema IEEE-118 barras são apresentados na Seção 4, e as principais conclusões são sumarizadas na Seção 5. gunda estratégia é baseada na inclusão das equações do Controle de Intercâmbio entre Áreas no conjunto de equações do fluxo de potência. Neste caso, a geração de potência ativa das barras selecionadas para compensar o desvio de intercâmbio é incluı́da no conjunto de variáveis a serem determinadas na solução das equações da rede elétrica em regime permanente. A formulação analı́tica proposta (Okamura et al., 1975) aborda este problema sob o ponto de vista da resposta dos geradores a uma variação do fluxo de potência nas linhas de interligação. A potência de saı́da dos geradores dentro de uma certa área é regulada automaticamente, de modo a manter o intercâmbio programado com as outras áreas. O modelo de fluxo de potência proposto em (Calovic e Strezoski, 1981), considera o erro estático de controle de área composto dos desvios de frequência em regime permanente e de fluxo de potência nas linhas de intercâmbio. Esses desvios são calculados explicitamente na solução das equações da rede elétrica em regime permanente e distribuı́dos entre as barras de geração que participam do controle secundário, segundo critérios baseados na capacidade de regulação dos geradores. Em (Santos et al., 2004), propõe-se o controle do fluxo de potência de intercâmbio baseado na utilização de múltiplas barras de folga em uma mesma área. Os incrementos de potência ativa gerada nas barras de folga de cada área são incluı́dos como variáveis adicionais no problema de fluxo de potência, e o Controle do Intercâmbio entre Áreas é representado explicitamente na formulação analı́tica. A geração de potência ativa de cada barra de folga depende do seu fator de participação no intercâmbio. A inclusão das equações do CIA no fluxo de potência continuado é proposta em (Carhuallanqui e Alves, 2012). Uma sequência de soluções do fluxo de potência desde um caso base até o ponto de carregamento máximo, considerando as restrições de intercâmbio entre áreas, é determinada. As equações do fluxo de potência são modificadas conforme sugerido em (Santos et al., 2004), considerando múltiplas barras de folga em uma mesma área. A principal desvantagem das metodologias baseadas na inclusão das equações de intercâmbio é o risco de inviabilidade na solução do fluxo de potência, por efeito de conflito entre as restrições de intercâmbio e a disponibilidade dos geradores selecionados para a compensação dos desbalanços no fluxo de potência. 2 2.1 Fluxo de potência com restrições de intercâmbio entre áreas Modelo analı́tico Na formulação do problema de fluxo de potência convencional, uma barra de geração é escolhida para regular o balanço de potência total do sistema. Isto dificulta a redistribuição de potência ativa e reativa gerada, necessária para compensar os desbalanços de potência causados por eventuais variações de carga e/ou contingências. Alternativamente, um conjunto de barras de geração (referidas em (Okamura et al., 1975; Calovic e Strezoski, 1981) como barras reguladoras e em (Santos et al., 2004; Carhuallanqui e Alves, 2012) como barras de folga), é selecionado para realizar esta compensação, o que torna o modelo de fluxo de potência mais realı́stico. Neste caso, a potência ativa gerada na i-ésima barra reguladora pode ser determinada através de diversas formas alternativas. Neste trabalho é suposto que um conjunto de barras reguladoras é previamente selecionando com base em critérios econômicos e/ou de segurança. A formulação analı́tica da geração de potência ativa é parametrizada segundo a equação, O presente trabalho propõe uma abordagem para considerar o intercâmbio de potência entre áreas no problema de fluxo de potência. Segundo o ONS, cada área de controle do sistema brasileiro é operada de tal forma que o seus intercâmbio lı́quido com o SIN coincida com o seu valor programado. Assim, esta metodologia pode ser inserida no contexto do controle automático de geração (controle secundário), com o objetivo de manter a potência de intercâmbio no seu valor nominal, distribuindo os desvios de intercâmbios entre as múltiplas barras reguladoras da área, conforme o Pgi (ρgi ) = Pgref + si ∆Pgi i 2122 (1) Anais do XX Congresso Brasileiro de Automática Belo Horizonte, MG, 20 a 24 de Setembro de 2014 onde PTpgr e PTj (e, f ) são respectivamente os valoj res programado e calculado do intercâmbio j. As variáveis a serem determinadas na solução deste problema são as componentes real e imaginária da tensão nas barras e a potência ativa gerada nas barras reguladoras. O balanço de potência ativa das barras reguladoras é modelado expressando-se a potência ativa gerada Pgi segundo a Eq. (1), tal que as variáveis adicionais são os si correspondentes aos geradores de regulação. As restrições de desigualdade impostas na formulação do fluxo de potência estendido são os limites de geração de potência ativa e de potência reativa, isto é, onde Pgref é o valor de referência, o parâmetro si i determina a parcela de variação na potência ativa de saı́da da i-ésima barra reguladora, e ∆Pgi é uma constante que representa a taxa de variação da potência ativa gerada, a qual é especificada geralmente com base em critérios econômicos e/ou de segurança. Por exemplo, o uso de fatores iguais para todos os geradores reguladores supõe que a variação de potência ativa independe do custo, da capacidade ou da localização destas unidades. Em (Carhuallanqui e Alves, 2012), esses fatores são definidos de acordo com a equação, Pgref ∆Pgi = P i Pgi (2) iǫΩj Pgmi ≤ Pgi (si ) ≤ PgM i onde Ωj representa Po conjunto de barras reguladoras da área j, e Pgi é a potência total gerada M Qm gi ≤ Qgi (e, f ) ≤ Qgi iǫΩj M onde Pgmi , PgM e Qm gi , Qgi são respectivamente os i limites mı́nimo e máximo de geração de potência ativa e reativa. A imposição das restrições de igualdade adicionais relativas a especificação dos intercâmbios lı́quidos está inevitavelmente associada ao risco de inviabilização da solução do problema da Eq. (5), se as unidades reguladoras não forem convenientemente selecionadas ou se as restrições de intercâmbio forem conflitantes com as caracterı́sticas do sistema de potência. Portanto, para estabelecer o problema representado na Eq. (5), as seguintes suposições são adotadas: na área j. Este critério é baseado na participação da i-ésima barra reguladora na geração total da área em que a mesma está localizada. Para formular o problema de fluxo de potência com restrições de intercâmbio entre áreas, supõem-se que o gerador da barra reguladora contribui para a compensação de ambos, a variação de carga e o controle dos fluxos de intercâmbio. Assume-se que o mesmo opera com a magnitude da tensão constante e a potência ativa de saı́da varia de acordo com a Eq. (1). A geração de potência reativa dessas unidades é dada por, Qgi = Qdi + Qdi (e, f ) (3) • os geradores reguladores disponı́veis para o ajuste dos intercâmbios entre áreas são previamente selecionados; onde a demanda de potência na barra i é modelada como potência constante. O j-ésimo intercâmbio lı́quido de potência ativa, denotado PTj , entre as áreas i e k é expresso de forma semelhante à (Monticelli, 1983), X PTj = Pik (e, f ) (4) • o número de intercâmbios programados é menor ou igual ao que o número de geradores reguladores; ikǫΓj • considera-se que cada área possui pelo menos um gerador regulador; onde Pik é o fluxo de potência na linha de transmissão ik, e Γj é o conjunto de linhas de transmissão que interligam as áreas i e k. A inclusão das equações que representam o intercâmbio entre áreas na formulação do problema de fluxo de potência resulta num o sistema de equações não lineares composto de: 1) a equação de balanço de potência ativa de todas as barras, exceto a de referência angular; 2) a equação de balanço de potência reativa das barras PQ; 3) a equação quadrática da magnitude da tensão das barras PV e de regulação; e 4) as equações de especificação dos fluxos nas linhas de intercâmbio programado. Em termos analı́ticos, Pgi − Pdi (ei , fi ) − Pi (e, f ) = 0 Qgi − Qdi − Qi (e, f ) = 0 2 Viref − e2i − fi2 = 0 (6) • o número de intercâmbios programados é menor do que o número de áreas interligadas; • a parcela da variação de carga atribuı́da a cada intercâmbio de potência é especificada a priori; 2.2 Método de Solução A solução do problema expresso pela Eq. (5) através do método de Newton requer que a cada iteração seja resolvido um sistema linear da forma, ∆P ∆Q ∆V2 = ∆T (5) PTpgr − PTj (e, f ) = 0 j 2123 J1 J3 J5 H1 J2 J4 J6 H2 # Ft " ∆e 0 ∆f 0 ∆s 0 (7) Anais do XX Congresso Brasileiro de Automática Belo Horizonte, MG, 20 a 24 de Setembro de 2014 onde, ∂P (e, f ) ∂e ∂Q (e, f ) J3 = ∂e 2 ∂V (e, f ) J5 = ∂e ∂PT (e, f ) H1 = ∂e J1 = ∂P (e, f ) ∂f ∂Q (e, f ) J4 = ∂f ∂V 2 (e, f ) J6 = ∂f ∂PT (e, f ) H2 = ∂f caso, ns = nt , ou seja, o número de equações é igual ao número de variáveis, tal que o sistema linear admite uma única solução, supondo-se que a matriz Jacobiana é nãosingular. J2 = 3. o número de fluxos de intercâmbio programados é maior do que o número de barras reguladoras. Então, ns < nt , isto é, o número de equações é maior do que o número de variáveis, tal que a Eq. (7) representa um sistema linear sobredeterminado. Neste caso, técnicas baseadas no critério dos mı́nimos quadrados poderiam ser utilizadas para obter uma solução, a qual seria inútil para as aplicações práticas, desde que as restrições de igualdade representadas pelas equações não lineares do fluxo de potência não seriam necessariamente satisfeitas. (8) e, ∆s é um vetor coluna e Ft é uma matriz esparsa. A ordem e natureza dos elementos de ∆s e Ft dependem da forma como a geração de potência ativa das barras reguladoras é modelada. Os aspectos da implementação computacional para o cálculo das matrizes da Eq. (8) são apresentados em (Qin, 2008). Suponha que: nb é o número total de barras do sistema; nr é o número de barras reguladoras disponı́veis para o controle do intercâmbio; na o número de áreas interligadas; e nt é o número de intercâmbios programados. O número de equações a serem resolvidas e o número de variáveis a serem determinadas no problema de fluxo de potência estendido são respectivamente, 3 Metodologia proposta As equações que representam o fluxo de potência estendido podem ser escritas na forma compacta como g(x, s) = 0 (9) onde g(x, s) é um vetor coluna de ordem neq , cujos componentes são as funções algébricas não lineares representando as equações de balanço de potência e os intercâmbios lı́quidos programados. Fazendo yt = [xt | st ], a linearização da Eq. (9) no ponto ye e na direção ∆y fornece neq = 2nb − 2 + nt nvr = 2nb − 2 + ns onde ns é a ordem do vetor ∆s, cujas componentes são as variáveis adicionais incluı́das no problema de fluxo de potência estendido pelas equações que representam as restrições de intercâmbio lı́quido de potência ativa. O vetor ∆s possui ns = nr componentes ∆si e a matriz Ft tem dimensão (nb − 1) × nr . A solução do problema de fluxo de potência estendido fornece nvr = 2nb − 2 + nr variáveis, ou seja, (2nb − 2) relativas as componentes real e imaginária das tensões nas barras e nr variáveis si para o ajuste da potência ativa gerada. Os elementos Ft (i, j) não nulos ocupam as posições em que o regulador j está localizado na barra i. Esses elementos são os fatores ∆Pgi (desde que a geração de potência ativa é modelada pela Eq. (1)). A dimensão do sistema linear da Eq. (7) depende do número de áreas envolvidas, do número de intercâmbios programados e do número de barras reguladoras disponı́veis para ajustar os intercâmbios. A análise desta equação revela a matriz Jacobiana tem dimensão (2nb −2+nt)×(2nb −2+ ns ), tal que os seguintes três casos podem ocorrer: W(ye )∆y = b (10) onde W(ye ) é a matriz Jacobiana, de ordem neq × nvr e b = −g(xe ) é um vetor coluna de ordem neq , ambos calculados no ponto onde é feita a linearização. Quando o número de intercâmbios de potência ativa programados é menor do que o número de controles (ou áreas com intercâmbio controlado), a Eq. (10) caracteriza um sistema linear subdeterminado, com infinitas soluções. Neste caso, se o posto da matriz W(xe ) é neq , o seu espaço nulo tem dimensão (nvr − neq ) × nvr . Isto significa que a solução geral da Eq. (10) pode ser expressa num sub-espaço reduzido, de dimensão (nvr − neq ), em função de (nvr − neq ) variáveis. No presente estudo, a estratégia utilizada para incorporar as restrições de fluxo de potência ativa nos intercâmbios consiste em determinar inicialmente uma solução geral para a Eq. (10), e posteriormente calcular a solução particular de acordo com um critério préestabelecido, de forma análoga aquela proposta em (Simões Costa et al., 1985). A solução geral da Eq. (10) é dada por (Hanson e Lawson, 1969) 1. o número de fluxos de intercâmbio programados é menor do que o número de barras reguladoras. Então, ns > nt , isto é, o número de equações é menor do que o número de variáveis, tal que o sistema linear é subdeterminado e admite infinitas soluções. ∆y = ∆y0 + T0 z (11) onde ∆y0 é a solução de mı́nima norma Euclideana, T0 é a matriz de ordem nvr × (nvr − neq ), de espaço nulo das linhas de W(ye ), isto é, 2. o número de intercâmbios programados é igual ao número de barras reguladoras. Neste 2124 Anais do XX Congresso Brasileiro de Automática Belo Horizonte, MG, 20 a 24 de Setembro de 2014 no vetor do lado direito da a inclusão de Pgref r Eq. (16), os incrementos obtidos como solução deste sistema linear possuem considerável magnitude quando comparados com os respectivos componentes da solução de mı́nima norma Euclideana. Visando determinar uma solução geral mais equilibrada em termos dessas duas componentes, a solução correspondente ao espaço nulo é modificada pelo fator de passo, W(ye )T0 = Θ (Θ é uma matriz nula de ordem neq × (nvr − neq )), e z é um vetor coluna arbitrário de ordem (nvr − neq ). A solução de mı́nima norma Euclideana é obtida resolvendo-se o problema de otimização 1 ∆yt0 ∆y0 2 sujeito a W(ye )∆y0 = b M aximize (12) ou seja, −1 ∆y0 = W(ye ) W(ye )W(ye )t b t −1 λ0 = W(ye )W(ye ) b α=β t (13) 1 ref (P + Ftr ∆s)t (Pref gr + Ftr ∆s) (14) 2 gr 1. determinação da solução do fluxo de potência convencional para o caso base; onde Pref gr é um vetor coluna de ordem nr , cujos componentes são os valores de referência da geração de potência ativa nas barras reguladoras; Ftr a submatriz da matriz Ft definida anteriormente, correspondente as barras de regulação (e portanto de dimensão (nr × nr )), e ∆s é um vetor coluna de ordem nr , com componentes ∆si . Da Eq. (11), ∆s = ∆y0s + T0r z (17) onde β é um escalar especificado pelo usuário. O ||∆y 0 || componente uniformiza as duas soluções ||T0 z|| em termos de magnitude dos componentes. O escalar β pode ser usado controlar diretamente os incrementos de geração de potência das barras reguladoras e indiretamente a geração de potência ativa da barra de folga. Assim, β = 0 implica em desvios de pequena magnitude, distribuı́dos uniformemente como decorrência da natureza da solução de mı́nima norma Euclideana. Na medida em que este escalar aumenta, mais geração de potência ativa é atribuı́da a barra de folga. Note ainda, que o fator α tende a zero na convergência do processo iterativo. Visando avaliar a solução do problema de fluxo de potência com restrições de intercâmbio, o procedimento sumarizado na sequência de passos descrita a seguir foi utilizado. onde λ0 é o vetor dos multiplicadores de Lagrange das restrições de igualdade da Eq. (12). Diversos critérios podem ser utilizados para calcular a solução particular, definida com o auxı́lio das variáveis z da Eq. (11). Em todos os casos, a matriz de espaço nulo T0 é suposta conhecida (no presente trabalho foi utilizado um comando especı́fico do ambiente MatLab para esta finalidade). Considerando que a potência ativa gerada varia de acordo com a Eq. (1), a determinação do vetor z que minimiza os desvios quadráticos da potência ativa gerada nas barras reguladoras com relação ao valor de referência pode ser estabelecido como o objetivo. Neste caso, é necessário resolver um problema de otimização de porte reduzido, da forma, Minimize ||∆y 0 || ||T0 z|| 2. especificação da variação percentual da carga de cada área e dos intercâmbios de potência ativa; 3. solução do problema de fluxo de potência estendido expresso pela Eq. (5). O objetivo dos testes foi observar os seguintes aspectos: (15) onde ∆y0s e T0r são respectivamente o vetor com as componentes de ∆y0 e a submatriz de T0 , ambos relativos as barras reguladoras. Substituindose a Eq. (15) na Eq. (14) e aplicando-se as condições de otimalidade de primeira ordem, a solução do problema de otimização resultante é obtida resolvendo-se o sistema linear 1. o processo iterativo com relação a influência dos diferentes fatores de ponderação atribuı́dos a solução correspondente ao espaço nulo; 2. a qualidade das soluções obtidas com o uso dos fatores ∆Pgi da Eq. (1) definidos com base na capacidade máxima de geração de potência ativa da área segundo a Eq. (2). (Tt0r Fttr Ftr T0r )z = −Tt0r Fttr Ftr (Pref gr + ∆y0s ) (16) onde a matriz de coeficientes e o vetor do lado direito tem dimensões (nr − nt ) × (nr − nt ) e (nr − nt ) × 1), respectivamente. O problema de otimização da Eq. (14) é irrestrito e portanto a solução correspondente ao espaço nulo tende a minimizar acentuadamente os desvios na geração de potência ativa das barras reguladoras. Isto é compensado pela geração da barra de folga, calculada após a convergência do processo iterativo. Além disso, devido 4 Resultados da simulação Para a obtenção dos resultados numéricos, o sistema-teste IEEE 118-barras foi decomposto nas quatro áreas mostradas na figura 1. A divisão das áreas de intercâmbio foi proposta em (Lin e Horng, 2011). O sistema é composto por 54 geradores distribuı́dos nas quatros áreas: área 1 (15 geradores), área 2 (11 geradores), área 3 (12 geradores), área 2125 Anais do XX Congresso Brasileiro de Automática Belo Horizonte, MG, 20 a 24 de Setembro de 2014 Figura 1: Sistema-teste IEEE 118 barras: 4 áreas interligadas 4 (16 geradores). Destes geradores foram determinadas 16 barras de regulação: área 1 (barras 49, 54, 59, 61, 65 e 66), área 2 (barras 12 e 46), área 3 (barras 10, 25 e 26) e área 4 (barras 80, 89, 100, 103 e 111). Inicialmente foi determinada a solução do fluxo de potência para o caso base, a qual é apresentada por área nas tabelas 1 e 2. Nesta condição, os fluxos de intercâmbio entre as áreas são: P12 = 503, 14 MW, P13 = 26, 57 MW, P14 = −269, 66 MW e P23 = −434, 61 MW. Posteriormente, foi suposto um aumento de 15% na demanda total do sistema, com um aumento de 15% nos fluxos de potência ativa dos intercâmbios P12 , P13 e P14 o que restringe estes fluxos aos valores 578,61, 30,55 e -310,11 MW, respectivamente. A tabela 3 mostra a solução do problema de fluxo de potência com a inclusão dos intercâmbios programados e aumento de carga, obtida após 18 iterações do método de Newton-Raphson. Durante o processo iterativo a potência ativa das barras de regulação é ajustada de acordo a com a Eq. (1) até que os desbalanços nos fluxos de intercâmbio programados satisfaçam o critério de convergência adotado (1.0 ×10−3 pu(MW)). Após isto, o ajuste é feito para satisfazer o desbalanço de potência ativa das barras de regulação, o que requer em geral duas iterações adicionais para a convergência. Deve ser observado que o número de iterações para a convergência depende mais das restrições impostas do que do porte do sistema elétrico. Em ternos de CPU, as 18 iterações correspondem a um esforço computacional de 4,2 segundos. Pode ser observado que as gerações de potência ativa totais das áreas 1, 2, 3 e 4 aumen- Tabela 1: Resultado do fluxo de potência - caso base 2126 Barra V delta Pg Qg Área 1 49 54 59 61 65 66 1,02 0,95 0,98 0,98 1,00 1,05 -9,00 -14,70 -10,62 -5,80 -2,28 -2,47 204,00 48,00 155,00 160,00 391,00 392,00 115,69 3,93 105,26 -146,35 101,97 -2,13 Área 2 12 46 0,99 1,00 -17,51 -11,44 85,00 19,00 91,28 -5,25 Área 3 10 25 26 1,05 1,05 1,01 5,87 -1,82 -0,04 450,00 220,00 314,00 -51,04 49,72 9,89 Área 4 80 89 100 103 111 1,04 1,00 1,02 1,00 0,98 -1,00 9,73 -1,92 -5,52 -10,22 477,00 607,00 252,00 40,00 36,00 104,90 -13,66 108,87 41,69 -1,84 Anais do XX Congresso Brasileiro de Automática Belo Horizonte, MG, 20 a 24 de Setembro de 2014 Tabela 2: Fluxos nas Interligações - caso base De interligação 1-2 interligação 1-3 interligação 1-4 interligação 2-3 MW Mvar 46 42 42 45 48 38 Total 25,84 119,00 119,00 36,22 29,30 173,75 503,14 0,38 18,73 18,73 0,21 3,85 -8,53 70 70 24 71 Total 6,24 20,32 26,57 -1,86 -11,95 77 77 79 81 77 80 80 80 80 82 Total -81,47 -81,47 -46,60 -44,38 -15,73 -269,66 -54,39 -54,39 -28,62 -124,12 21,40 5 5 6 5 16 17 17 20 30 Total -82,41 -56,05 -34,18 -63,74 4,04 -74,04 -60,42 -12,45 -55,33 -434,61 -26,69 -13,16 -4,49 3,84 5,33 -22,32 25,49 6,70 38,52 47 49 49 49 49 65 4 3 7 11 12 15 18 19 38 Para Tabela 3: Resultado do fluxo de potência - após a variação de carga taram de 1350 MW , 104 MW, 984 MW e 1412 MW para 1480,20 MW, 107,64 MW, 1118,10 MW e 1585,20 MW, respectivamente. As demandas totais do caso base das áreas 1(1432 MW e 486 MVAr), 2 (941 MW e 393 MVAr), 3 (372 MW e 138 MVAr) e 4 (923 MW e 421 MVAr) atingiram os valores 1646,80 MW e 558,90 MVAr (área 1); 1082,10 MW e 451,95 MVAr (área 2); 427,80 MW e 158,70 MVAr (área 3) e 1061,4 MW e 484,15 MVAr (área 4) na solução obtida após o aumento de carga. Os fluxos de potência ativa e reativa nas linhas de intercâmbio após a variação da demanda são mostrados na tabela 4. Observe que as restrições programadas nos intercâmbios (áreas 1 e 2 , áreas 1 e 3 e áreas 1 e 4) são satisfeitas, ou seja, estes fluxos de intercâmbio aumentam em 15% com relação aos valores do caso base (P12 = 578, 61 MW, P13 = 30, 55 MW, P14 = −310, 02 MW). Por outro lado, o intercâmbio entre as áreas 2 e 3 tem uma variação de 17% (-434,61/-508,59) em relação ao caso base, o que é atribuı́do a ausência de restrição correspondente a um valor programado. Deve ser enfatizado que há um compromisso entre o aumento de carga, a programação do fluxo de intercâmbio que suprirá este aumento e a geração de potência ativa de cada área. Desde que o problema de fluxo de potência com restrições de intercâmbio é resolvido sob o ponto de vista global, a programação equivocada do intercâmbio de potência pode facilmente inviabilizar a solução. Por exemplo, pode haver reserva de potência ativa numa determinada área, mas a restrição de intercâmbio impede que a mesma seja utilizada. Na tabela 5 é apresentada a variação na geração de potência ativa na barra de folga do sis- Barra V delta Pg Qg Área 1 49 54 59 61 65 66 1,02 0,95 0,98 0,98 1,00 1,05 -12,12 -19,20 -14,43 -8,70 -3,83 -4,40 220,68 48,89 163,23 168,27 436,23 442,90 145,45 22,20 139,21 -99,75 85,78 17,00 Área 2 12 46 0,99 1,00 -22,78 -15,25 94,88 12,75 110,47 5,69 Área 3 10 25 26 1.05 1,03 1,02 2,15 -2,49 -0,58 465,63 267,51 384,92 -48,66 -34,02 104,36 Área 4 80 89 100 103 111 1,00 1,02 1,03 0,99 0,98 -1,43 9,68 -3,96 -7,88 -13,46 546,61 692,31 269,41 40,45 36,38 -27,94 37,83 155,00 14,82 -1,75 Tabela 4: Fluxos nas Interligações - após a variação de carga De MW Mvar 47 49 49 49 49 65 46 42 42 45 48 38 Total 36,65 138,29 138,29 43,99 34,78 209,47 578,61 0,38 18,73 18,73 0,21 3,85 -8,53 interligação 1-3 70 70 24 71 Total 8,33 22.21 30,55 -1,86 -11.95 interligação 1-4 77 77 79 81 77 80 80 80 80 82 Total -97,36 -97,36 -52,86 -57,68 -4,74 -310,02 -54,39 -54,39 -28,62 -124,12 21,40 interligação 2-3 4 3 7 11 12 15 18 19 38 5 5 6 5 16 17 17 20 30 Total -93,51 -65,08 -37,57 -70,10 -0,53 -92,49 -71,43 -18,35 -56,52 -508,59 -26,69 -13,16 4.76 0.21 5,33 -22,31 -25,49 -6,70 -35.52 interligação 1-2 2127 Para Anais do XX Congresso Brasileiro de Automática Belo Horizonte, MG, 20 a 24 de Setembro de 2014 tema, devido ao valor especificado de β. Pode ser observado que o valor de potência ativa gerada aumenta conforme o valor de β é acrescido, passando de 667,48 MW na solução de mı́nima norma para 750,42 MW (β = 1, 6). self-regulation characteristics., International Journal of Electric Power and Energy Systems 3(2): 65–74. Carhuallanqui, H. A. e Alves, D. A. (2012). Fluxo de carga continuado considerando o controle de intercâmbio entre áreas., Anais do XIX Congresso Brasileiro de Automática, CBA 2012., pp. 1506–1513. Tabela 5: Variação da Potência gerada na Barra de folga em Função de β β Pgf (MW) Qgf (MVar) -1,5 -1,0 0 1,0 1,6 665,85 657,92 667,48 729,17 750,42 -9,73 -97,76 -40,73 -158,11 -31,03 Echavarren, F. M., Lobato, E., Rouco, L. e Gómez, T. (2011). Formulation, computation and improvement of steady state security margins in power systems. Part 1: theoretical framework., Electric Power System Research 33: 340–346. Hanson, R. J. e Lawson, C. L. (1969). Extensions and applications of the Householder algorithm for solving linear least squares problems, Math. Comput. Os resultados numéricos apresentados nesta seção foram obtidos com os fatores ∆Pgi definidos de acordo com a Eq. (2). Valores unitários também foram testados. Entretanto, verificou-se que geralmente a especificação dos fluxos nas linhas de intercâmbio conduz a uma solução do fluxo de potência na qual estes fatores de distribuição exercem pouca influência. A análise dos resultados do fluxo de potência mostra que o nı́vel de tensão das barras do sistemas se manteve dentro dos limites especificados (0,90 e 1,05 pu), tanto no caso base quanto após a variação da carga e do intercâmbio. Isto se deve ao grau de acoplamento reduzido entre as malhas P δ − QV do sistema-teste. Outro dado importante são as perdas de potência ativa nas linhas de transmissão, que no caso base foram 132.99 MW e após a variação de carga atingiram o valor de 177,40 MW. Este aumento de 33,44% é devido a localização das barras de regulação em cada área. 5 Ibsais, A. e Ajjarapu, V. (1996). Voltage stabilitylimited interchange flow, Electric Power System Research 38: 91–95. Lin, S. S. e Horng, S. C. (2011). A more general parallel dual-type method and application to state estimation, International Journal of Electrical Power and Energy Systems 33(3): 799–804. Monticelli, A. J. (1983). Fluxo de Carga em Redes de Energia Elétrica, Editora Edgard Blücher. Okamura, M., O-ura, Y., Hayashi, S., Uemura, K. e Ishiguro, F. (1975). A new power flow model and solution method - including load and generator characteristics and effects of system control devices., IEEE Transactions on Power Apparatus and Systems 94(3): 1042– 1050. Conclusões Este trabalho aborda o problema da determinação de soluções das equações da rede elétrica em regime permanente com restrições de intercâmbio programado. A formulação do fluxo de potência convencional é estendida para incluir o modelo analı́tico das restrições de intercâmbio. A inclusão da potência ativa gerada nas barras reguladoras como variável do problema de fluxo de potência resulta num sistema linear subdeterminado na solução através do método de NewtonRaphson. Este tipo de modelagem tem a vantagem de flexibilizar a determinação de diferentes nı́veis de potência ativa gerada. Os resultados numéricos apresentados para um modelo de potência constante ilustram o potencial da metodologia proposta em estudos de planejamento da operação dos sistemas elétricos de potência. Qin, Z. Yang, Y. (2008). Vectorization implementation of optimal power flow in rectangular form based on interior point method, Proceedings of the IEEE Power Engineering Soiety General Meteeing - Delivery of the Electrical Energy in the 21-st Century, pp. 1–6. Santos, M. J., Pereira, J. L. R., Passos Filho, J. A., Oliveira, E. J. e Silva Jr., I. C. (2004). Uma nova proposta para o controle de intercâmbio entre áreas., Revista Brasileira de Automação e Controle 15(4): 449–458. Simões Costa, A. J., Seleme Jr., S. I. e Salgado, R. S. (1985). Equality constraints in power system state estimation via orthogonal row-processing techniques, Proceedings of the IFAC Symposium on Planning and Operation of Electric Energy Systems, pp. 43–49. Referências Calovic, M. S. e Strezoski, V. C. (1981). Calculation of steady-state load flows incorporating system control effects and consumer 2128
Baixar