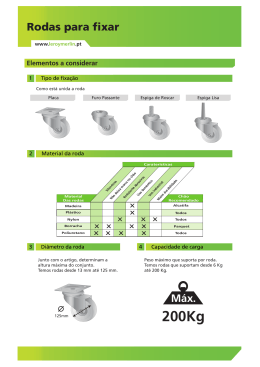
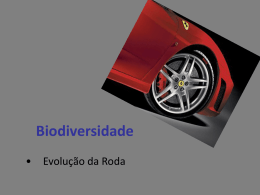
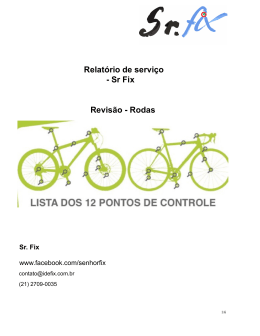
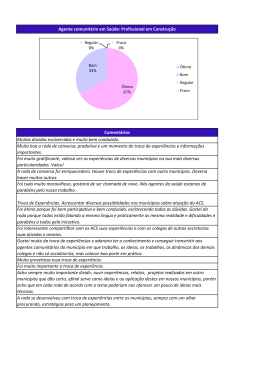
TRANSPORTES E OBRAS DE TERRA Movimento de Terra e Pavimentação NOTAS DE AULA – DIMENSIONAMENTO DE PAVIMENTOS Prof. Edson de Moura Aula 03 – CARGA DE RODA SIMPLES EQUIVALENTE - CRSE 2009 CONSIDERAÇÕES SOBRE O CONCEITO DE CARGA DE RODA SIMPLES EQUIVALENTE (texto extraído da Tese para concurso de Professor Titular do Prof. Armando Martins Pereira – 1985) 1 Critério de equivalência adotado pelo CE O uso da equação de dimensionamento de pavimentos flexíveis proposta pelo CE, Ahlvin (1959) Brown (1961) Turnbull (1962) Turnbull et all (1967) requer a conversão prévia dos carregamentos de tráfego, cujas rodas acarretam sobreposição de efeitos, em cargas de roda simples que lhes sejam equivalentes (equivalent single wheel loads) Dentre os possíveis critérios de equivalência de cargas, a entidade retro mencionada optou pelo da igualdade da deformação vertical máxima (deflexão máxima) verificada em uma profundidade igual à espessura total do pavimento. Por conseguinte, as deflexões computadas e comparadas são referidas à interface pavimento/subleito. Segundo o critério adotado pelo CE, a carga de roda simples equivalente a um dado conjunto de rodas múltiplas é a carga que, atuando sobre uma área de contato igual à de uma das rodas do conjunto de múltiplas, gera na superfície do subleito uma deflexão máxima idêntica à resultante da ação combinada das rodas que compõem o referido conjunto de múltiplas Ahlvin (1959) Brown (1961) Yoder & Witczak (1975). No cálculo da carga de roda simples equivalente a um dado conjunto de rodas múltiplas é pressuposta a validade das seguintes hipóteses simplificadoras: 1.2 1a) A carga total incidente no conjunto de múltiplas é considerada como uniformemente distribuída nas rodas que dele participam. 2a) As áreas de contato entre as bandas de rodagem dos pneumáticos e a superfície do pavimento são consideradas como circulares. 3a) A pressão atuante ao longo da área de contato entre a banda de rodagem de cada pneumático e a superfície do pavimento (pressão de contato) é suposta uniforme e, ao mesmo tempo, igual à pressão de inflação do referido pneumático. 4a) A área de contato entre a banda de rodagem de cada pneumático e a superfície do pavimento é admitida como sendo igual à razão entre a carga incidente sobre a roda e a pressão de contato. 5a) O sistema pavimento/subleito é assimilado a um semi-espaço constituído por um único material perfeitamente elástico, homogêneo e isótropo, ou seja, ao clássico modelo de Boussinesq. 6a) O coeficiente de Poisson do sistema pavimento/subleito é considerado invariável com a profundidade e igual a 0,5. Deflexões geradas por uma roda simples. Fator de deflexão A figura 1 representa um carregamento composto de uma roda simples aplicada à superfície de um semi-espaço de Boussinesq, cujo material é caracterizado por um módulo de elasticidade E e por um coeficiente de Poisson igual a 0,5. Na figura mencionada, as variáveis inerentes ao carregamento são as seguintes: W - carga incidente na roda. ρ - raio da área de contato, suposta circular. p - pressão atuante ao longo da área de contato, considerada como uniforme e igual à pressão de inflação do pneumático, pi. A - área de contato, assumida como sendo igual a w . p De acordo com a teoria de Boussinesq, o valor da deflexão Δ, gerada num ponto 0 qualquer localizado numa profundidade z e afastado de r em relação à vertical que passa pelo centro da área de contato, é obtido através da seguinte equação (6): Δ = 1,5 pρ E ⎡z H⎤ ⎢ρ D + 2 ⎥ ⎣ ⎦ Na equação (1), D e H são ambas funções de 01 z ρ e r ρ . A equação (1) pode, ainda, ser escrita sob a forma (2) (6): Δ= pρ F E (2) onde: ⎡z H⎤ F = 1,5⎢ D + ⎥ 2⎦ ⎣ρ (3) F é denominado fator de deflexão, inferindo-se a partir de (3) que o seu valor depende z r exclusivamente das razões e . Logo: ρ ρ ⎛z r⎞ F = f ⎜⎜ , ⎟⎟ ⎝ρ ρ⎠ (4) Como conseqüência, fixando-se o valor da área de contato e, portanto, também o valor do respectivo raio 0, o fator de deflexão F dependerá, ainda, de z e de r, ou seja, da posição do ponto 0 considerado. No caso particular em que o ponto é tomado sobre a vertical passante pelo centro da área de contato, isto é, quando r é igual a zero, o valor do fator de deflexão F passa a ser função apenas da relação z , sendo, nestas circunstâncias, calculado pela equação: ρ F= 1,5 ⎡ ⎛ z ⎞2 ⎤ ⎢1 + ⎜⎜ ⎟⎟ ⎥ ⎣⎢ ⎝ ρ ⎠ ⎦⎥ 1/ 2 (5) Prefixada a área de contato e consequentemente, também o valor de ρ , a equação (5) fornece o valor máximo que o fator de deflexão F pode assumir em cada profundidade. Vale dizer que, considerada constante a profundidade, o valor máximo do fator de deflexão corresponde ao ponto situado na vertical que passa pelo centro da área de contato da roda simples considerada (ponto 0´ da figura 1). Soluções nomográficas têm sido propostas para a função Turnbull (1962), a exemp1o daquela constante da referência Yoder & Witczak (1975) e que se acha reproduzida na figura 2 do presente trabalho. O nomograma em questão permite a fácil determinação do fator de deflexão F, desde que conhecidos os valores de z e de r, convenientemente expressos em unidades do raio da área de contato ρ . 1.3 Carga de roda simples equivalente a uma roda dupla. A figura 3.1 representa de forma esquemática um carregamento constituído por uma roda dupla. Em virtude das considerações anteriores, as deflexões Δ1 e Δ2 ocasionadas num ponto 0 qualquer do semi-espaço pela ação isolada de cada uma das rodas que compõem o conjunto (rodas 1 e 2) são respectivamente iguais a: Δ1 = onde: pρ F1 E ⎛z r ⎞ F1 = f ⎜⎜ , 1 ⎟⎟ ⎝ρ ρ⎠ pρ F2 E e Δ2 = e ⎛z r F2 = f ⎜⎜ , 2 ⎝ρ ρ ⎞ ⎟⎟ ⎠ Como conseqüência do princípio da superposição dos efeitos, a deflexão Δ verificada no ponto 0 e decorrente da ação combinada das duas rodas integrantes da dupla é igual à soma das deflexões que cada uma das rodas componentes do conjunto ocasionaria, caso agisse isoladamente. Assim sendo: Δ = Δ1 + Δ 2 = ⎞ pρ ⎛ ⎜⎜ F1 + F2 ⎟⎟ E ⎝ ⎠ (6) Esta linha de raciocínio pode ser aplicada ao cálculo das deflexões geradas pelo conjunto em pontos situados em qualquer horizontal, permitindo, desta forma, o traçado da curva de variação correspondente. No exemplo simulado na figura 3.1, a horizontal selecionada é a que corresponde à interseção entre o plano horizontal situado na profundidade z e o plano vertical que contém os centros das áreas de contato das rodas componentes do conjunto. Neste caso particular, a curva que representa a variação da deflexão é simétrica em relação à vertical que passa pelo centro do carregamento e o valor máximo de Δ ocorre em um ponto situado no segmento 010 2 . A posição exata do ponto em questão dependerá da profundidade z e das características da roda dupla considerada. A determinação precisa do valor da deflexão máxima requer, pois, a rigor, o cálculo da deflexão em vários pontos e o subseqüente traçado da curva de variação correspondente. Todavia, a precisão que se obtém em se considerando como valor máximo da deflexão o maior dos valores encontrados respectivamente nos pontos 01 e 02 é, em geral, aceitável, em se tratando da resolução de problemas correntes Ahlvin (1959) Yoder & Witczak (1975). Dada uma roda dupla e arbitrado o valor do módulo de elasticidade do semi-espaço por ela solicitado, pEρ resulta constante e, nestas condições, a deflexão num ponto qualquer é proporcional ao somatório F1 + F2 . Portanto, o ponto no qual este somatório assume o valor máximo será também o ponto onde o carregamento gera a máxima deflexão na profundidade z considerada. Neste caso, a equação (6) assume o aspecto: Δ máx = pρ (F1 + F2 )máx E (7) De uma forma mais abrangente, qualquer que seja a posição do ponto 0 no semi-espaço, haverá sempre uma carga que, aplicada a uma roda simples de área de contato análoga às das componentes da roda dupla, produz no ponto considerado deflexão idêntica à nele ocasionada pela referida roda dupla. A carga de roda simples em questão será, pois, no que tange ao deslocamento vertical, equivalente à roda dupla no ponto considerado. O critério de equivalência adotado pelo CE nada mais é do que uma particularização do conceito retro exposto, de vez que o ponto selecionado é especificamente aquele no qual a deflexão verificada assume o seu maior valor. De acordo com o CE, a carga de roda simples we equivalente à roda dupla exemplificada na figura 3.1 é a carga que, atuando sobre uma roda simples de área de contato igual à de uma das rodas componentes da dupla, gera deflexão máxima idêntica à proporcionada pela roda dupla na profundidade z tomada como referência. A deflexão máxima Δe acarretada na profundidade z pela roda simples equivalente se verifica no ponto 03, situado sobre a vertical que passa pelo centro da respectiva área de contato (figura 3.2) sendo o seu valor obtido através da equação: Δe = pe ρ Fe E (8) Nesta última, pe representa a pressão de contato equivalente e Fe o fator de deflexão correspondente. Em virtude da equação (5): Fe = 1,5 ⎡ ⎛ z ⎞2 ⎤ ⎢1 + ⎜⎜ ⎟⎟ ⎥ ⎢⎣ ⎝ ρ ⎠ ⎥⎦ 1/ 2 (9) A condição de equivalência implica necessariamente na verificação da igualdade Δ máx = Δ e e, como conseqüência, também na da igualdade entre os segundos membros das equações (7) e (8) . Logo: p ρ pρ (F1 + F2 )máx = e Fe E E ou ainda: p(F1 + F2 )máx = p e Fe (10) Por outro lado, em se levando em conta a relação suposta entre as variáveis carga de roda, área de contato e pressão de contato, tem- se que: p= W A pe = e We A A substituição na equação (10) de p e pe respectivamente por e w (F1 + F2 )máx = we . Fe w w e e conduz a: A A (11) Explicitando-se em (11), resulta finalmente: We = (F1 + F2 )máx (12) Fe A equação (12) permite, pois, o cálculo da carga de roda simples equivalente a uma dada roda dupla, em consonância com o critério adotado pelo CE. A pressão de contato equivalente, por sua vez, é subsequentemente determinada através de: pe = 1.4 we A pe = ou we π ρ2 (13) Carga de roda simples equivalente a um conjunto de rodas múltiplas A linha de raciocínio explanada no item anterior é extensiva ao cálculo da carga de roda simples equivalente a qualquer carregamento composto de rodas múltiplas. Neste caso, é necessário pesquisar-se o valor máximo do somatório dos fatores de deflexão referentes a todas as rodas do conjunto, e a equação mobilizada para o cálculo de we assume a seguinte forma geral: we = (∑ F ) i máx Fe .w (14) onde: ⎛ z r ⎞ Fi = f ⎜⎜ , i ⎟⎟ ⎝ρ ρ⎠ Nas equações (14 e (15): (15) wz- carga incidente em cada roda do conjunto, suposta igual à razão entre a carga total que sobre ele atua e o seu número de rodas; profundidade considerada; ρraio das áreas de contato das rodas do conjunto. Em virtude das hipóteses assumidas: ρ= w π p ri - distância do centro da área de contato de uma roda genérica do conjunto à vertical que passa pelo ponto situado na profundidade z, onde a deflexão ocasionada pelo conjunto é máxima; Fi - fator de deflexão correspondente à roda genérica e referido ao ponto situado na profundidade a, onde a deflexão gerada pelo conjunto é máxima; Fe - fator de deflexão correspondente à roda simples equivalente, determinado pela equação (9). 1.5 Variação da carga de roda simples equivalente com a posição do ponto tomado como referência. Em função do que até aqui foi exposto, conclui-se que ao sentido mais amplo o valor da carga de roda simples equivalente a um carregamento qualquer depende, além das variáveis inerentes ao próprio carregamento, da posição ocupada no semi-espaço pelo ponto tomado como referência. Essa asseveração se estende, por razões óbvias, também ao valor da pressão de contato equivalente. Com a finalidade de ilustrar a influência da posição do ponto de referência sobre os valores da carga de roda simples equivalente e da pressão de contato equivalente, tomou-se como exemplo o carregamento de rodas múltiplas correspondente ao eixo simples de rodas duplas adotado como padrão de carga pelo CE. A geometria do referido eixo, bem como os valores das demais variáveis que o caracterizam Brown (1961),Turnbull et all (1967), acham-se representados na figura 4. Calcularam-se os valores da carga de roda simples we equivalente ao carregamento mencionado, em se considerando distintos pontos tomados sobre as duas verticais indicadas na figura 4. A primeira delas (vertical I) passa pelo ponto médio do segmento limitado pelos centros das áreas de contato das rodas que compõem uma das duplas e a segunda (vertical II) por sua vez, pelo centro da área de contato de uma das rodas internas. Os resultados encontrados acham-se representados graficamente na figura 5, de cujo exame resultam as seguintes observações: la) O valor de we cresce na medida em que a profundidade z aumenta, independentemente da vertical considerada. 2a) Para profundidades moderadas (até 20 cm, no exemplo) os valores de we obtidos para os pontos da vertical II são superiores aos obtidos para os pontos da vertical I. Em se considerando profundidades intermediárias (entre 20 cm e 92 cm, no exemplo) os valores de we referentes aos pontos da vertical I superam os referentes aos pontos da vertical II, invertendo-se novamente a situação para grandes profundidades (superiores a 92 cm, no exemplo). As pressões de contato equivalentes pe foram também calculadas, tendo sido os respectivos resultados plotados no gráfico da figura 6. A equação (13) evidencia que, para um dado carregamento, o valor de pe é proporcional ao valor de we. Como conseqüência, as curvas incluídas nas figuras 5 e 6 exteriorizam as mesmas tendências.
Download