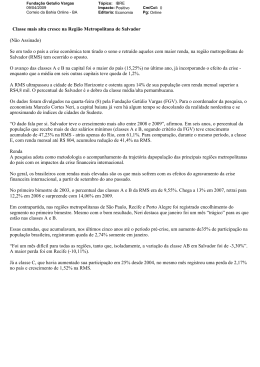
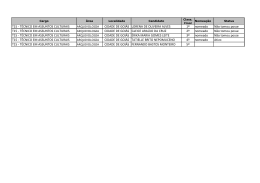
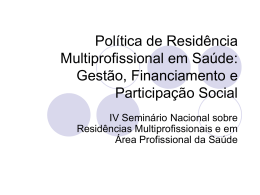
Anais do XIX Congresso Brasileiro de Automática, CBA 2012. UM NOVO MÉTODO PARA MONITORAMENTO DE INTEGRIDADE ESTRUTURAL USANDO MICROCONTROLADOR NICOLÁS CORTEZ1,2, JOZUE VIEIRA FILHO1, FABRICIO G. BAPTISTA3 1 Laboratório de Processamento de Sinais e Instrumentação - Departamento de Engenharia Elétrica - UNESP Avenida Brasil, 56 – Centro CEP 15385-000 - Ilha Solteira – SP [email protected], [email protected] 2 Departamento de Matemática y Física - Universidad Nacional de San Cristóbal de Huamanga - PERÚ Portal Independencia, 57 – Ayacucho – Huamanga – Perú 3 Departamento de Engenharia Elétrica, UNESP Av. Eng. Luiz Edmundo Carrijo Coube, 14-01 CEP 17033-360 - Bauru - SP [email protected] Abstract This paper presents a new method to detect damage in structures based on the electromechanical impedance (EMI) principle. The system follows the variations in the output voltage of piezoelectric transducers and does not compute the impedance itself. The proposed system is portable, autonomous, versatile, and could efficiently replace commercial instruments in different SHM applications. The identification of damage is performed by simply comparing the variations of RMS voltage from response signals of piezoelectric transducers, such as PZT (Pb-lead Zirconate Titanate) patches bonded to the structure, obtained for different frequencies of the excitation signal. The proposed system is not limited by the sampling rate of analog-digital converters, dispenses Fourier transform algorithms, and does not require a computer for processing, operating autonomously. A low-cost prototype based on microcontroller and digital synthesizer was built and experiments were carried out on an aluminum structure and excellent results have been obtained. Keywords Structural health monitoring, piezoelectric transducers, electromechanical impedance, measurement instruments, microcontroller, direct digital synthesizer. Resumo Neste trabalho é apresentado um novo método para detecção de danos em estruturas baseado no princípio da impedância eletromecânica (EMI). O sistema segue as variações na tensão de saída de transdutores piezelétricos e não calcula a impedância em si. O sistema proposto é portátil, autônomo, versátil e pode substituir com eficiência os instrumentos comerciais em diferentes aplicações de monitoramento de integridade estrutural (SHM: Structural Health Monitoring). A identificação dos danos é realizada pela simples comparação das variações de tensão eficaz (RMS) de sinais de resposta de transdutores piezelétricos, tais como cerâmicas de Zirconato Titanato de Chumbo (PZT: Pb-lead Zirconate Titanate) coladas à estrutura, obtidas para diferentes frequências do sinal de excitação. O sistema proposto não é limitado pela taxa de amostragem de conversores analógico-digitais, dispensa algoritmos da transformada de Fourier e não requer um computador para processamento, operando de forma autônoma. Um protótipo de baixo custo, baseado em microcontrolador e sintetizador digital, foi construído e experimentos foram realizados sobre uma estrutura de alumínio, obtendo-se excelentes resultados. Palavras-chave Monitoramento de integridade estrutural, transdutores piezelétricos, impedância eletromecânica, instrumentos de medição, microcontrolador, sintetizador digital direto. 1 Introdução Muitas estruturas físicas na engenharia continuam sendo utilizadas apesar do longo tempo de vida e da possibilidade de apresentarem danos que podem afetar o desempenho ou colocar em risco a segurança dos usuários. Portanto, o monitoramento de integridade estrutural (SHM: Structural Health Monitoring) que utilizam técnicas apropriadas de detecção de dano tem avançado nos últimos anos e provocado mudanças em alguns paradigmas. Sendo uma área de pesquisa muito importante do ponto de vista econômico e de segurança, têm atraído um grande número de pesquisadores acadêmicos e industriais. O objetivo principal de um sistema de SHM é monitorar uma estrutura e detectar danos incipientes, se possível, em suas condições normais de operação usando técnicas de avaliação não destrutivas (NDE: NonDestructive Evaluation). Tal procedimento pode minimizar custos de reparo e manutenção e proporcionar um maior nível de segurança aos usuários, evitando possíveis falhas catastróficas. Nesse contexto, méto- ISBN: 978-85-8001-069-5 dos de SHM baseados na impedância eletromecânica (EMI: Electro-Mechanical Impedance) têm sido considerados mais promissores, mostrando eficiência e simplicidade, além de usar componentes de baixo custo, tais como os transdutores piezelétricos de PZT (Pb-lead Zirconate Titanate – Titanato Zirconato de Chumbo). O princípio básico da técnica da EMI é baseado no efeito piezelétrico. Assim, quando um transdutor de PZT é colado na estrutura a ser monitorada, existe uma interação entre a impedância mecânica da estrutura e a impedância eléctrica do transdutor. Como consequência, alterações na impedância mecânica da estrutura causadas por danos, tais como fissuras ou corrosão, podem ser detectadas através da medição da impedância eléctrica do transdutor operando em uma faixa de frequência apropriada (Cawley, 1984; Giurgiutiu and Rogers, 1997; Liang, Sun and Rogers, 1994; Park, Sohn, Farrar and Inman, 2003). As aplicações típicas de SHM, geralmente, utilizam analisadores de impedância comerciais de alto custo ou sistemas de medição de impedância baseados na 929 Anais do XIX Congresso Brasileiro de Automática, CBA 2012. função de resposta em frequência (FRF: Frequency Response Function). Esses sistemas são muitas vezes proibitivos para muitas aplicações por precisarem de dispositivos DAQ (Data Acquisition) com elevadas taxas de amostragem, processador digital de sinais (DSP: Digital Signal Processor), grandes capacidades de armazenamento ou um PC (Personal Computer – microcomputador pessoal) para processar informação. Este trabalho visa contribuir com o desenvolvimento e implementação de uma nova abordagem para sistemas de SHM microcontrolado baseado no principio da EMI. Para monitorar a estrutura, o método proposto apresenta a vantagem de não realizar a medição da impedância elétrica, mas apenas registrar as variações da tensão eficaz (RMS) nos transdutores de PZT colados na estrutura. Com base nessa nova abordagem, foi desenvolvido um sistema de SHM portátil, autônomo, versátil, de reposta rápida e não limitado pela taxa de amostragem de conversores analógico-digitais (A/D). O sistema proposto foi avaliado experimentalmente e comparado com um sistema de referência. Os testes mostram um sistema eficiente que gera resultados tão satisfatórios quanto os obtidos com o sistema de referência. 2 Monitoramento estrutural (SHM) baseado na impedância eletromecânica Muitos centros de pesquisa continuam utilizando instrumentos comerciais de alto custo, tais como os analisadores de impedância HP4192A, HP4194A da Hewlett-Packard, para desenvolver sistemas de SHM baseados na impedância eletromecânica. Apesar de serem precisos, esses instrumentos são pesados, volumosos, tem muitos recursos que não são usados em sistemas de SHM e permitem a medição da impedância elétrica de apenas um transdutor. Visando superar esses inconvenientes, muitos pesquisadores têm proposto sistemas alternativos de medição. Um estudo pioneiro nessa área foi conduzido por Peairs, Park and Inman (2004). Os autores utilizaram um circuito simples e de baixo custo, baseado em amplificador operacional, e um analisador de espectro para obter a impedância elétrica no domínio da frequência. Recentemente, esse método foi melhorado por Panigrahi, Bhalla and Gupta (2010), sendo que um gerador de função foi usado para excitar gradualmente o transdutor com sinais senoidais puros de frequência variável e um osciloscópio foi usado para medir a resposta da saída em cada frequência de excitação. Um analisador de impedância, ligado a um transdutor de PZT através de um simples resistor, foi proposto por Xu and Giurgiutiu (2005). Nesse sistema, o sinal de excitação é fornecido por um gerador de função controlado através de uma interface GPIB (General Purpose Interface Bus). Os sinais de excitação e de resposta são amostrados de forma síncrona usando um dispositivo DAQ através de uma interface baseada em LabVIEW. Portanto, esses sistemas exigem ainda instrumentos comerciais. ISBN: 978-85-8001-069-5 Kim, Grisso, Ha and Inman (2007) propuseram um sistema de SHM baseado em um DSP. Para excitar a estrutura foi usado um trem de pulsos retangulares digitais de várias frequências gerado mediante modulação por largura de pulso (PWM: Pulse Width Modulation). Essa abordagem foi usada com um novo algoritmo que elimina o uso de conversores analógicodigital (A/D) e digital-analógico (D/A), mas a faixa e o passo de frequência em que a impedância pode ser analisada são limitados pela pouca memória do DSP e pela complexidade computacional do algoritmo. Portanto, para viabilizar o uso do sistema, um analisador de impedância comercial de alto custo ainda é necessário. Recentemente, um método para obter um valor aproximado da parte real da impedância elétrica de transdutores piezelétricos, baseado em DSP e para aplicações de SHM, foi proposto por Neto et al. (2011). O sinal de excitação é gerado por meio de um sintetizador digital direto (DDS) e o sinal de resposta em amplitude e fase é obtido por um sistema baseado em DSP e alguns circuitos auxiliares. Além disso, o sistema precisa de um PC e uma interface baseada em LabVIEW para monitorar a estrutura. Recentemente, muitos sistemas compactos de SHM foram desenvolvidos usando soluções integradas em chip único. Por exemplo, Min, Park, Yun and Song (2010) apresentam um método baseado no dispositivo de medição de impedância integrado no chip AD5933 da Analog Devices. Embora esse dispositivo seja muito compacto e de baixo custo, tem algumas limitações para muitas aplicações de SHM, tais como frequência máxima de operação limitada a 100 kHz e número total de incrementos de frequência limitado a 511 por varredura. Um sistema de medição portátil para medição de impedância baseado em um DSP foi proposto por Radil, Ramos and Serra (2008). O sinal de excitação, gerado através de um DDS, é aplicado a uma impedância de referência em série com uma impedância desconhecida. Os sinais de resposta correspondentes são amostrados simultaneamente através de dois conversores A/D para serem registrados pelo DSP. O sistema implementa no DSP algoritmos FFT (Fast Fourier Transform) e de sine-fitting que determinam, no domínio da frequência, os componentes necessários para obter e impedância desconhecida. Wang and You (2008) apresentaram um método para monitorar o módulo da impedância elétrica de um transdutor piezelétrico através de um circuito ponte. Como sinal de excitação, foi usado um sinal de clock. Além do circuito ponte, é necessário um dispositivo DAQ conectado a um PC executando LabVIEW. Um método de medição de impedância baseado na FRF obtida a partir da FFT dos sinais de excitação e resposta, usando um circuito auxiliar simples, foi proposto por Baptista and Vieira Filho (2009). Um PC executando LabVIEW é usado para sintetizar um sinal tipo chirp, que é usado para excitar o PZT colado à estrutura monitorada. O sinal de resposta do transdutor piezelétrico é amostrado de forma sincronizada com o sinal de excitação usando-se um dispositivo DAQ. Esse sistema, considerado eficiente, foi aperfei930 Anais do XIX Congresso Brasileiro de Automática, CBA 2012. çoado por Baptista, Vieira Filho and Inman (2011), no qual novas opções, como monitoramento em tempo real de vários sensores e compensação para os efeitos de compensação de temperatura, foram incluídas. Uma característica comum a todos os métodos de SHM baseados na EMI é a necessidade de um sinal de referência denominado de “baseline”, que nada mais é do que a impedância eletromecânica obtida com a estrutura considerada íntegra. A detecção do dano é feita fazendo-se medições a posteriori e usando-se métricas específicas para comparar as diferentes medidas. 3 Detecção de dano baseada na variação da tensão rms do transdutor piezelétrico A impedância elétrica é uma grandeza bidimensional e é representada em termos das partes real (resistência) e imaginária (reatância) ou magnitude e fase. Assim, a impedância é uma função de valores complexos que depende da frequência. Considerando um transdutor de PZT colado à estrutura e submetido a uma frequência de excitação ( f exc ), a impedância resultante pode ser dada por: Z (ω ) = V pzt (ω ) I pzt (ω ) , (1) sendo V pzt (ω ) a tensão fasorial de excitação, I pzt (ω ) a corrente fasorial e ω = 2π f exc a frequência angular. Se a tensão de excitação é um sinal de onda senoidal puro, a magnitude da impedância ( Z (ω ) ) pode ser dada por (Nilsson and Riedel, 2011): Z (ω ) = V pzt _ rms (ω ) I pzt _ rms (ω ) , (2) sendo V pzt _ rms (ω ) a tensão RMS e I pzt _ rms (ω ) a corrente RMS. Na Figura 1 tem-se um circuito simples que permite implementar um sistema capaz de relacionar a impedância eletromecânica e a tensão RMS do sinal de resposta do PZT, que é diretamente relacionada à integridade estrutural. Rs Vexc (ω) Vpzt (ω) i Z PZT / Estrutura Figura 1. Circuito utilizado para obter o sinal de resposta do transdutor de PZT. quência suficientemente elevada, a magnitude da impedância é dada, aproximadamente, por: Z (ω ) ≅ V pzt _ rms (ω ) Vexc _ rms (ω ) − V pzt _ rms (ω ) RS , (3) sendo que RS é um resistor limitador de corrente, Z (ω ) a magnitude da impedância eletromecânica, e Vexc _ rms (ω ) e V pzt _ rms (ω ) são as tensões RMS do sinal de excitação e reposta, respectivamente. Resolvendo a Equação (3) para a tensão RMS do transdutor ( V pzt _ rms (ω ) ), obtém-se: V pzt _ rms (ω ) ≅ Z (ω ) Vexc _ rms (ω ) Z (ω ) + RS (4) A partir da Equação (4), considerando-se um regime permanente e um sinal de excitação com amplitude constante para cada frequência (ω), pode-se concluir que a tensão RMS ( V pzt _ rms (ω ) ) do transdutor é alterada apenas se a magnitude da impedância eletromecânica ( Z (ω ) ), que está diretamente relacionada com a condição física da estrutura monitorada, também o for. Portanto, a tensão RMS do transdutor é sensível a qualquer mudança na impedância mecânica da estrutura e essa abordagem é suficiente para detectar danos estruturais. Tal abordagem elimina a necessidade de medição exata da impedância, como acontece nos métodos previamente discutidos. A partir desse conceito, foi possível desenvolver um sistema de SHM simples e baseado no principio da EMI monitorando apenas a tensão RMS do transdutor PZT em uma faixa de frequência apropriada. Essa metodologia foi confirmada experimentalmente e os resultados indicam que a tensão RMS do sinal de resposta do transdutor fornece uma assinatura excelente e sensível para a detecção de danos. 4 Proposta do sistema de SHM microcontrolado A arquitetura do sistema de SHM baseado na tensão RMS do transdutor usando um microcontrolador é mostrada na Figura 2. O sinal de excitação é gerado por um dispositivo DDS que fornece, por vez, uma onda sinusoidal de frequência constante até o sistema atingir o regime permanente. Isto é necessário para medir a tensão RMS do transdutor e detectar com precisão variações na sua resposta, que são alteradas por presença de danos. Depois de ter medido a tensão RMS em uma frequência inicial, a frequência de saída do DDS é aumentada, passo a passo, e o processo de medição se repete até que a faixa inteira de frequências seja concluída. Sendo o transdutor PZT um dispositivo predominantemente capacitivo e considerando que o sinal de excitação é uma onda sinusoidal pura com uma fre- ISBN: 978-85-8001-069-5 931 Anais do XIX Congresso Brasileiro de Automática, CBA 2012. Microcontrolado Buffering, Filtragem Gerador senoidal r e Amplificação µC DDS SPI Interface RS-232 PortC PC PIC R Circuito de medição CAD PZT/Estrutura PZT SPI PortC Memória externa Vref LCD Teclado básico PortB PortD Figura 2. Sistema de SHM proposto. A faixa de frequências adequada é um problema crítico e depende da estrutura e do tipo de dano a ser detectado (Baptista and Vieira Filho, 2010; Peairs, Tarazaga and Inman, 2007). A onda senoidal gerada pelo dispositivo DDS é sintetizada e não é pura. Como resultado, existem harmônicos da frequência fundamental e o sinal de saída deve passar por um circuito de condicionamento antes de ser aplicado ao transdutor. O circuito de condicionamento consiste de um buffer e um filtro passabaixas (LPF), como mostrado na Figura 3. O buffer impede o efeito de carregamento e o filtro proporciona uma onda sinusoidal suave com amplitude apropriada para a excitação do transdutor. As características do filtro dependem do dispositivo DDS e da faixa de frequência em que a estrutura será monitorada. O circuito mostrado na Figura 1 é o mesmo utilizado para excitar o transdutor de PZT. O valor apropriado da resistência em série depende das características do transdutor e da amplitude do sinal de excitação. Figura 3. Circuito de condicionamento de sinal. O diagrama da Figura 4 é basicamente um retificador de precisão, sendo que o buffer impede o efeito de carregamento devido à alta impedância do transdutor. Como mencionado anteriormente, o dispositivo DDS deve gerar um sinal com frequência constante durante um determinado período de tempo o suficiente para atingir o estado estacionário e fornecer um nível DC correspondente à tensão RMS do transdutor. Para o circuito específico do sistema proposto, o tempo de espera é de 10ms. A tensão RMS do transdutor é digitalizada usando-se um conversor analógico-digital (A/D) integrado ao microcontrolador. O microcontrolador também controla o dispositivo DDS e seu firmware inclui o gerenciamento da arquitetura completa do sistema de SHM, tais como: a entrada de dados através do teclado, o que permite ao usuário escolher a faixa de frequências, a resolução e outros parâmetros; gerar e armazenar uma assinatura básica - baseline; fazer os cálculos dos índices de dano e apresentar os resultados em um display de cristal líquido (LCD). Portanto, o sistema opera de forma autônoma. Um fluxograma simplificado do firmware do microcontrolador é mostrado na Figura 5. De acordo com o fluxograma, o sistema estabelece inicialmente as configurações básicas do microcontrolador e do dispositivo DDS. Em seguida, o usuário define o modo de aquisição de dados que pode ser o "modo baseline" ou "modo monitoramento". Seja qual for o modo escolhido, o sistema executa um ciclo de varredura de frequências. Para cada frequência de excitação, a tensão RMS correspondente no PZT é armazenada numa memória externa. Considerando que o objetivo deste estudo é monitorar as variações na tensão RMS para detectar danos, não é necessário converter os valores de tensão binários armazenados na memória para os seus correspondentes valores decimais, nem realizar qualquer ajustamento de escala. Quando a aquisição de dados é concluída em toda a faixa de frequências, o sistema executa o cálculo dos índices de falha métrica comparando as assinaturas de tensão RMS obtidas no "modo monitoramento" com as assinaturas obtidas no "modo baseline". O circuito de medição mostrado no diagrama da Figura 4 permite a conversão AC-DC do sinal de resposta do transdutor, fornecendo na saída a tensão RMS correspondente para cada frequência de excitação gerada pelo dispositivo DDS. Início Configuração do PIC Configuração do DDS (gerador senoidal) Modo de aquisição Gera sinal Vexc (fi,t) Outra aquisição? Aquisição de Vpzt_rms_i Cálculo de RMSD e CCDM Armazena Vpzt_rms_i em memória externa Detecto dano? Sim Não Pausa Não Sim Não Figura 4. Obtenção da tensão RMS do transdutor PZT. Sim Tx de dados para PC Fim da varredura? Fim Figura 5. Fluxograma simplificado do firmware. ISBN: 978-85-8001-069-5 932 Anais do XIX Congresso Brasileiro de Automática, CBA 2012. O método proposto foi avaliado usando-se duas métricas clássicas de comparação entre os dados monitorados e o “baseline”: o desvio da raiz média quadrática (RMSD: Root Mean Square Deviation) (Giurgiutiu and Rogers, 1998) e a métrica do desvio do coeficiente de correlação (CCDM: Correlation Coefficient Deviation Metric) (Marqui et al., 2008). O índice RMSD é baseado na norma euclidiana e é obtido como segue: N (Vn ,d − Vn ,h ) 2 n Vn ,h 2 RMSD = ∑ , Para avaliar a sensibilidade na detecção de danos do método proposto, foram realizados testes em uma placa de alumínio de 500 x 30 x 2 mm. Foram simulados danos estruturais colando uma porca de aço de 14 x 4 mm e 2 g em diferentes distâncias do transdutor. O transdutor utilizado foi uma cerâmica de PZT colada na extremidade da viga. Na Figura 6 é apresentado o arranjo experimental. (5) 100 mm 100 mm 100 mm 100 mm PZT Porca de aço Placa de alumínio RS232 RMS para a estrutura em estado íntegro (modo baseline) e com possíveis falhas, respectivamente. Os cálculos são realizados amostra por amostra, n, no conjunto de N amostras. O índice CCDM é dado por: LCD DDS Amplificador & LPF PIC onde Vn ,h e Vn ,d representam as assinaturas de tensão Conversor AC-DC Teclado básico +5V GND -5V Figura 6. Arranjo experimental. N CCDM = 1 − ∑ (V n ,h − Vh )(Vn ,d − Vd ) , (6) n N ∑ (V n ,h n − Vh ) 2 N ∑ (V n ,d − Vd ) 2 n sendo Z h e Z d as médias da impedância na faixa de frequência considerada obtidas antes e depois do dano, respectivamente, dadas por: = Zh 1 N 1 = Z n ,h ; Zd ∑ N n N N ∑Z n ,d (7) n Depois que os índices RMSD e CCDM são calculados, os resultados são exibidos no LCD. Um limiar pode ser definido de acordo com a intensidade dos danos a serem detectados e, em caso de dano, os dados podem ser transferidos para um computador através de uma interface RS-232 para uma análise mais detalhada. O tempo de espera entre cada ciclo pode ser ajustado pelo usuário de acordo com a aplicação. 5 Arranjo experimental Para confirmar a viabilidade do método proposto, um protótipo foi montado utilizando uma placa de desenvolvimento baseada no microcontrolador PIC16F877A da Microchip. Além disso, usou -se um DDS AD5932 da Analog Devices, uma memória EEPROM 25LC1024 da Microchip e um filtro Butteworth (LPF) com ganho de tensão de 8, o que fornece um sinal de excitação com 2,3 V de amplitude. O resistor limitador de corrente ( RS ) foi escolhido de 1 kΩ. Esses componentes são listados aqui apenas para referência, a escolha dos componentes apropriados depende de cada aplicação. ISBN: 978-85-8001-069-5 O arranjo experimental descrito é usualmente usado na literatura para avaliar e comparar sistemas de SHM. Um incremento de massa (porca de aço) é comumente utilizado para simular danos tais como trincas, corrosão, e outros. Esse incremento provoca alterações na impedância mecânica da estrutura e tem como vantagem não causar dano permanente na estrutura a ser analisada. Além do cálculo dos índices RMSD e CCDM, as assinaturas da tensão RMS foram transferidas para um PC e comparadas com as assinaturas de impedância convencionais obtidas utilizando um sistema de referência (Baptista and Vieira Filho, 2009) baseado em um dispositivo DAQ e um PC executando uma aplicação na plataforma LabVIEW. 6 Resultados A análise dos dados deve ser realizada numa faixa de frequências que garanta boa sensibilidade para a detecção de danos e repetitividade entre as medições, o que depende do transdutor e da estrutura. Para os testes apresentados neste estudo, após análise de diferentes faixas, verificou-se que a faixa de frequências de 17 – 33 kHz, com passos de 4 Hz, proporciona bons resultados. Uma comparação qualitativa entre a assinatura da tensão RMS e a assinatura da impedância convencional obtidas com o método proposto e com o sistema de referência, respectivamente, para a estrutura íntegra é apresentada na Figura 7. O mesmo arranjo e as mesmas condições foram usados para os dois sistemas. Para uma melhor comparação gráfica, o valor numérico da tensão RMS foi multiplicado por um fator de 2,1. De acordo com os resultados apresentados na Figura 7, observa-se que as duas assinaturas revelam tendências semelhantes. Portanto, a tensão RMS do transdutor varia de acordo com as frequências naturais da 933 Anais do XIX Congresso Brasileiro de Automática, CBA 2012. estrutura monitorada, realçado pelos picos de ressonância. Os resultados experimentais são consistentes com a análise teórica, pois a Equação (4) indica que a tensão RMS está diretamente relacionada com a impedância. Figura 7. Comparação qualitativa entre assinatura da tensão RMS e assinatura da impedância. A sensibilidade para a detecção de danos foi avaliada simulando-se danos localizados em diferentes distâncias do transdutor. Na Figura 8 apresentam-se as assinaturas da tensão RMS obtidas na condição de estrutura íntegra (baseline) e em condições de falhas simuladas, obtidas colando-se uma pequena porca a distâncias de 10, 20, 30 e 40 cm do transdutor. Apenas uma faixa estreita de frequência é exibida para permitir uma comparação mais detalhada entre as assinaturas. Observam-se variações significativas na forma das assinaturas em comparação com o baseline, especialmente para danos perto do transdutor. Essas variações indicam que a assinatura da tensão RMS é sensível a danos. Conforme mostrado na Figura 9, os valores dos índices mantiveram-se praticamente constantes durante as cinco medições para cada condição. Portanto, o sistema proposto apresenta uma excelente repetitividade e é significativamente sensível para detectar danos. A média dos índices RMSD obtidos para o dano localizado a uma distância de 30 cm do transdutor é cerca de 30 vezes maior do que a media dos índices obtidos para a estrutura integra. No caso de dano localizado a uma distância de 40 cm do transdutor, essa relação é cerca de 20 vezes. Analisando-se os índices CCDM obtidos e apresentados na Figura 10, fica evidente que a relação entre os índices obtidos na condição de dano e íntegra é perto de 750 para danos localizados a uma distância de 30 cm do transdutor e perto de 420 para danos a uma distância de 40 cm do transdutor. Assim, a obtenção de uma excelente repetitividade e as elevadas proporções entre os índices indicam que danos menores do que os simulados neste estudo poderiam ser eficazmente detectados definindo-s um limiar apropriado, o qual depende de cada aplicação específica. Figura 10. Índices CCDM e testes de repetitividade para o método proposto. Portanto, os resultados experimentais mostram conclusivamente a viabilidade do sistema proposto. A tensão RMS do transdutor é uma assinatura excelente para a detecção de danos, com excelente repetitividade e sensibilidade. Figura 8. Assinaturas da tensão RMS obtidas para a estrutura integra e para danos em diferentes distâncias do transdutor. A fim de proporcionar uma análise quantitativa sobre a sensibilidade, na Figura 9 apresentam-se os índices RMSD obtidos em diferentes momentos usando o sistema proposto para a estrutura íntegra e para danos localizados a distâncias de 30 e 40 cm do transdutor. Além disso, as medições para cada condição foram repetidas cinco vezes para verificar a repetitividade do sistema e descartar um diagnóstico falso positivo da estrutura. 7 Conclusões Neste artigo, apresentou-se uma nova abordagem para sistemas de SHM baseados no princípio da EMI. O método proposto não realiza a medição da impedância elétrica do transdutor como no caso dos sistemas convencionais propostos na literatura, mas de forma inovadora monitora apenas as variações na tensão RMS do transdutor. Isso permite o desenvolvimento de sistemas mais simples em hardware e software. Por ser a tensão RMS um nível DC, o método não possui limites de taxa de amostragem, o que é inovador. O sistema foi avaliado experimentalmente e os resultados mostram conclusivamente a sua viabilidade. Além disso, o sistema proposto pode ser otimizado para incluir outras características tais como o controle de redes de transdutores e comunicação sem fio. Figura 9. Índices RMSD e testes de repetitividade para o método proposto. ISBN: 978-85-8001-069-5 934 Anais do XIX Congresso Brasileiro de Automática, CBA 2012. Agradecimentos Os autores agradecem ao CNPq e à FAPEMIG pelo financiamento parcial deste trabalho, através do INCT-EIE; à Fundação Capes e à FAPESP (Processo 2011/20354) pelos suportes financeiros; á Fundação de Ensino, Pesquisa e Extensão de Ilha Solteira pelo soporte financeiro. Os autores também agradecem aos Professores Dr. Inman (Department of Aerospace Engineering, University of Michigan) e Dr. Lopes Junior (Departamento de Engenharia Mecânica, Universidade Estadual Paulista (UNESP) pelas colaboraçções na área de SHM. Referências Bibliográficas BAPTISTA, F. G. and VIEIRA FILHO, J. (2009). A new impedance measurement system for PZTbased structural health monitoring. IEEE Transactions on Instrumentation and Measurement, Vol. 58, No. 10, pp. 3602-3608. BAPTISTA, F. G. and VIEIRA FILHO, J. (2010). Optimal frequency range selection for PZT transducers in impedance-based SHM systems. IEEE Sensors Journal 2010, Vol. 10, No. 8, pp. 1297–1303. BAPTISTA, F. G., VIEIRA FILHO, J. and INMAN, D. J. (2011). Real-time multi-sensors measurement system with temperature effects compensation for impedance-based structural health monitoring. Structural Health Monitoring 2011. CAWLEY, P. (1984). The impedance method of nondestructive inspection. NDT International, Vol. 17, No. 2, pp. 59-65. GIURGIUTIU, V. and ROGERS, C. A. (1997). Electro-mechanical (E/M) impedance method for structural health monitoring and nondestructive evaluation. In: International Workshop on Structural Health Monitoring, Stanford,. Stanford, CA 1997. pp. 433–444. GIURGIUTIU, V. and ROGERS, C. A. (1998). Recent advancements in the electro-mechanical (E/M) impedance method for structural health monitoring and NDE. In: Annual International Symposium on Smart Structures and Materials. San Diego 1998. pp. 536-547. KIM, J., GRISSO, B. L., HA, D. S. and INMAN, D. J. (2007). A system-on-board approach for impedance-based structural health monitoring. In: Sensors and Smart Structures Technologies for Civil, Mechanical, and Aerospace Systems. San Diego 2007. pp. 65290O. LIANG, C., SUN, F. P. and ROGERS, C. A. (1994). An impedance method for dynamic analysis of active materials systems. ASME J Vibr Acoust, Vol. 116, No. 1, pp. 120–128. MARQUI, C. R., et al. (2008). External disturbance effect in damage detection using electrical impedance. In: International Modal Analysis Conference. Orlando 2008. ISBN: 978-85-8001-069-5 MIN, J., PARK, S., YUN, C. B. and SONG, B. (2010). Development of multi-functional wireless impedance sensor nodes for structural health monitoring. In: Proceedings of SPIE Sensors and Smart Structures Technologies for Civil, Mechanical, and Aerospace Systems. San Diego, CA 8 Mar 2010. NETO, R. M. F., et al. (2011). A low-cost electromechanical impedance-based SHM architecture for multiplexed piezoceramic actuators. Structural Health Monitoring, Vol. 10, No. 4, pp. 391-402. NILSSON, J. W. and RIEDEL, S. A. (2011). Electric circuits. 9th ed. New Jersey: Prentice Hall. PANIGRAHI, R., BHALLA, S. and GUPTA, A. (2010). A low-cost variant of electro-mechanical impedance (EMI) technique for structural health monitoring. Exp Tech 2010, Vol. 34, No. 2, pp. 25–29. PARK, G., SOHN, H., FARRAR, C. R. and INMAN, D. J. (2003). Overview of piezoelectric impedancebased health monitoring and path forward. The Shock and Vibration Digest, Vol. 35, No. 6, pp. 451-463. PEAIRS, D. M., PARK, G. and INMAN, D. J. (2004). Improving accessibility of the impedance-based structural health monitoring method. Journal of Intelligent Material Systems and Structures, Vol. 15, No. 2, pp. 129-139. PEAIRS, D. M., TARAZAGA, P. A. and INMAN, D. J. (2007). Frequency range selection for impedance-based structural health monitoring. J. Vibr. Acoust Vol. 129, No. 6, pp. 701–719. RADIL, T., RAMOS, P. M. and SERRA, A. C. (2008). Impedance measurement with sinefitting algorithms implemented in a DSP portable device. IEEE Transactions on Instrumentation and Measurement, Vol. 57, No. 1, pp. 197-204. WANG, S. and YOU, C. (2008). A circuit design for impedance-based structural health monitoring. Journal of Intelligent Material Systems and Structures, Vol. 19, No. 9, pp. 1029-1040. XU, B. and GIURGIUTIU, V. (2005). A low-cost and field portable electromechanical (E/M) impedance analyzer for active structural health monitoring. In: International Workshop on Structural Health Monitoring. Stanford 15–17 September 2005. pp. 634-644. 935
Baixar