SOBRE MODELOS MATEMÁTICOS PARA FRATURA EM SÓLIDOS
ELÁSTICOS
Milton Nogueira da Silva Junior
Tese de Doutorado apresentada ao Programa
de Pós-graduação em Engenharia Mecânica,
COPPE, da Universidade Federal do Rio
de Janeiro, como parte dos requisitos
necessários à obtenção do título de Doutor
em Engenharia Mecânica.
Orientadores: Fernando Pereira Duda
Eliot Fried
Rio de Janeiro
Dezembro de 2010
SOBRE MODELOS MATEMÁTICOS PARA FRATURA EM SÓLIDOS
ELÁSTICOS
Milton Nogueira da Silva Junior
TESE SUBMETIDA AO CORPO DOCENTE DO INSTITUTO ALBERTO LUIZ
COIMBRA DE PÓS-GRADUAÇÃO E PESQUISA DE ENGENHARIA (COPPE)
DA UNIVERSIDADE FEDERAL DO RIO DE JANEIRO COMO PARTE DOS
REQUISITOS NECESSÁRIOS PARA A OBTENÇÃO DO GRAU DE DOUTOR
EM CIÊNCIAS EM ENGENHARIA MECÂNICA.
Examinada por:
Prof. Fernando Pereira Duda, D.Sc.
Prof. Fernando Alves Rochinha, D.Sc.
Prof. Wladimir Augusto das Neves , D.Sc
Prof. Alexandre Madureira, Ph.D.
Prof. Alfredo Huespe, D.Sc.
RIO DE JANEIRO, RJ – BRASIL
DEZEMBRO DE 2010
Silva Junior, Milton Nogueira da
Sobre Modelos Matemáticos para Fratura em Sólidos
Elásticos/Milton Nogueira da Silva Junior.
Janeiro: UFRJ/COPPE, 2010.
– Rio de
IX, 42 p. 29, 7cm.
Orientadores: Fernando Pereira Duda
Eliot Fried
Tese (doutorado) – UFRJ/COPPE/Programa
Engenharia Mecânica, 2010.
Referências Bibliográficas: p. 37 – 42.
de
1. forças configuracional. 2. parâmetro de ordem. 3.
fratura. 4. Eshelby tensor. I. Duda, Fernando Pereira
et al. II. Universidade Federal do Rio de Janeiro, COPPE,
Programa de Engenharia Mecânica. III. Título.
iii
I dedicate this thesis to all the
little children who walk through
our huge Brazil without having
nothing to eat and dream about,
no home to come back at night
and no hope for changes.
iv
Agradecimentos
Media in via
Media in via erat lapis
erat lapis media in via
erat lapis
media in via erat lapis.
Non ero unquam immemor illius eventus
pervivi tam míhi in retinis defatigatis.
Non ero unquam immemor quod media in via
erat lapis
erat lapis media in via
media in via erat lapis.
Carlos Drummond de Andrade
Há várias pessoas que eu quero agradecer por me ajudar e encorajar durante
o curso de minha pesquisa para esta dissertação. Mas do que tudo, gostaria de
agradecer a Deus por ter me guiado até este momento, e por vir me ensinando
através de muitas pessoas a verdadeira simplicidade, e honestidade; que a cada dia
possa eu aprender um pouco mais.
Ao Professor Fernando Pereira Duda por ter me introduzido à mecânica do contínuo, e ter, de fato, me orientado; e por constantemente me lembrar que pesquisar
é um trabalho duro. Além disso, por me dar vários conselhos para o bem da minha
formação; com quem tenho o enorme prazer de trabalhar pelo imenso caráter, competência, dignidade e responsabilidade com o Brasil, e cuja história de vida me enche
de adimiração.
Ao Professor Eliot Fried por ter me co-orientado, especialmente durante minha
estada no Canada, na McGill University, me proporcionando uma ótima acomodação
para trabalhar e valiosas horas discutindo sobre o problema proposto.
v
A minha amada mãe, Kátia Regina de Oliveira Silva, que é uma mulher simples,
íntegra, inteligente, e talentosa; porém como muitos brasileiros foi sufocada e impedida de desenvolver seus talentos mais cedo. Eu quero agradecer ao meu amado pai,
Milton Nogueira da Silva, exemplo de dedicação familiar, dignidade, honestidade e
integridade. Também quero agradecer a minha avó, Nadir da Silva Nogueira, pelos inúmeros momentos de alegria, e a minha tia, Sandra da Silva Nogueira, pelo
grande apoio quando estava ainda na adolecência. Às minhas irmãs, Lilian Regina
de Oliveira Silva e Liliam de Oliveira Silva, sou muito grato, pela força que tiveram
em todos os momentos das nossas vidas.
Um agradecimento muito especial a minha amada futura esposa, Debbie van
Vliet, que além da enorme beleza física, como poucos, deixa a todos encantados
com sua pureza e bondade.
Por terem participado e colaborado na minha formação, me ensinando importantes técnicas todos esses anos, gostaria de agradecer aos Professores: Ana
Maria Senra Breitschaft, Antônio Roberto da Silva, Felipe Acker, Fernando Alves
Rochinha, I Shi Liu, Luiza Amália de Moraes, Maria Aguieiras, Valmar Carneiro
Barbosa, Wladimir Neves, Ricardo Rosa. Um agradecimento especial ao Professor
José Luís L. Silveira, pelo enorme apoio dado para o meu estágio de doutorado
no Canada, e ao meu amigo e Professor Fábio Tavares Ramos, por ter sempre me
incentivado.
A alguns amigos que foram muito importantes nesta jornada, são eles: André
Fontenelle, Diego Nogueira, Fabiano Brito, Felipe Olivieri, Karl Medevar, Kazuyoshi
Akiba, Marcelo Tavares, Rodrigo Hauser. Aos meus companheiros de apartamento:
João Eduardo Reis, por alguns suportes técnicos computacionais, e a Humberto
S. N. dos Anjos, pelas ajudas no inglês. Ao meu colega de laboratório, Gabriel
Guerra, pelas inúmeras vezes que me ajudou, e a Aldo Bazán por algumas proveitosas
discussões , deixo também meu agradecimento. À secretária acadêmica, Vera Lucia
P.S. Noronha, pelas muitas ajudas na parte burocrática, e a todos os funcionários
do departamento de Engenharia Mecânica da COPPE.
Finalmente, gostaria de agradecer à CAPES, CNPQ, e FAPERJ pelo apoio financeiro desde do tempo de iniciação científica. A todos que direta, ou indiretamente
colaboraram para o desenvolvimento deste trabalho também deixo meu agradecimento.
vi
Resumo da Tese apresentada à COPPE/UFRJ como parte dos requisitos necessários
para a obtenção do grau de Doutor em Ciências (D.Sc.)
SOBRE MODELOS MATEMÁTICOS PARA FRATURA EM SÓLIDOS
ELÁSTICOS
Milton Nogueira da Silva Junior
Dezembro/2010
Orientadores: Fernando Pereira Duda
Eliot Fried
Programa: Engenharia Mecânica
Do ponto de vista da mecânica do contínuo, existem basicamente duas abordagens distintas para fratura, a global e a local. Na abordagem global, ou clássica,
uma trinca é vista como uma linha ou superfície de descontinuidade para os campos
de deslocamento e de tensões, os quais são singulares na ponta da trinca. Já na
abordagem local, uma trinca é vista como uma pequena região de acumulação de
dano na qual os campos envolvidos são contínuos e apresentam elevados gradientes.
O presente trabalho procura estabelecer relações entre duas teorias de fratura:
a teoria global apresentada por Gurtin e Podio-Guidugli [1], na qual é empregada o
conceito de forças configuracional, e a teoria local apresentada por Duda e Souza [2],
na qual o dano é quantificado por um campo escalar. Especificamente, sob certas
hipóteses constitutivas, o presente trabalho estabelece condições necessárias para
que a teoria local seja vista como uma regularização da teoria global ou, equivalentemente, para que a teoria global seja obtida com um limite assintótico da teoria
local. Fundamental para o presente desenvolvimento é a utilização do método assintótico na obtenção do balanço de forças configuracional da teoria global como limite
do balanço correspondente na teoria local.
vii
Abstract of Thesis presented to COPPE/UFRJ as a partial fulfillment of the
requirements for the degree of Doctor of Science (D.Sc.)
ON MATHEMATICAL MODELS FOR FRACTURE IN ELASTIC SOLIDS
Milton Nogueira da Silva Junior
December/2010
Advisors: Fernando Pereira Duda
Eliot Fried
Department: Mechanical Engineering
From the stand point of continuum mechanics, there are two distinct approaches
to fracture, namely the global or classical approach and the local approach. In the
former, a crack is viewed as a line or surface of discontinuity for the displacement and
stress fields, which, by their turn, are singular at the crack tip. On the other hand,
the local approach views a crack as a small region in which damage accumulates
and the displacement and stress fields are continuous but have high gradients.
This work aims at investigating possible relationships between two fracture theories: the global theory formulated by Gurtin and Podio-Guidugli [1] and the local
theory formulated by Duda and Souza [2]. Specifically, under certain constitutive assumptions, the present work establishes necessary conditions for the local theory be
a regularization of the global theory, or, equivalently, the global theory be obtained
as an asymptotic limit of the local theory. The development of this work relies on
the use of matching asymptotic technique and the balance of configurational forces.
viii
Sumário
1 Introdução
2
1
Leis Básicas para a Propagação de Trinca e uma Teoria Baseada
no Parâmetro de Ordem
2.1 Leis Básicas para Propagação de Trinca . . . . . . . . . . . . . . . . .
8
8
2.1.1 Campos Básicos. Leis de Balanço. Segunda Lei . . . . . . . . 8
2.2 Uma Teoria Baseada no Parâmetro de Ordem . . . . . . . . . . . . . 12
2.2.1 Campos Básicos. Leis de Governo. Segunda Lei . . . . . . . . 13
2.2.2
2.2.3
Equações Constitutivas . . . . . . . . . . . . . . . . . . . . . . 14
Especialização Constitutiva . . . . . . . . . . . . . . . . . . . 15
3 Regularização e Resultados Obtidos
17
3.1 Decomposição dos Campos em Componentes de Volume e Excesso . . 17
3.2 Adimensionalização . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
3.3 Expansões e o Método Assintótico . . . . . . . . . . . . . . . . . . . . 20
3.4 Estimativas fora da Trinca . . . . . . . . . . . . . . . . . . . . . . . . 23
3.5 Estimativas dentro da Camada de Transição . . . . . . . . . . . . . . 24
3.6 Equipartição da Energia e suas Consequências . . . . . . . . . . . . . 26
3.7 Limite Assintótico das Leis de Governo da Teoria Baseada no
Parâmetro de Ordem . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
3.7.1
3.7.2
3.7.3
A taxa de liberação de energia de deformação . . . . . . . . . 29
A energia de superfície . . . . . . . . . . . . . . . . . . . . . . 29
A cinética . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
4 Conclusões
33
A Cálculo das Estimativas
34
Referências Bibliográficas
37
ix
Capítulo 1
Introdução
A Mecânica da Fratura Linear Elástica é baseada no critério de Griffith [3] de que
a propagação de uma trinca é o resultado da competição entre a taxa de liberação
da energia elástica G
∂Eb
,
(1.0.1)
∂`
e a energia consumida para a criação de uma nova trinca, denominada densidade de
G=−
energia de superfície ψ, com ` denotando o comprimento da trinca e Eb a energia de
deformação. Todo o processo ocorre na ponta da trinca, sendo o o principal objetivo
da teoria determinar quando uma trinca preexistente irá crescer. Na verdade, Griffith foi motivado pelo trabalho de Inglis [4], que forneceu uma primeira investigação
qualitativa de como a presença de um defeito afeta o estado de tensões. Inglis, ao
resolver o problema de um furo elíptico em uma placa infinita com tensão uniforme
aplicada no infinito, mostrou que o campo de tensões tinha um máximo na ponta
da elipse. Daí, ao observar que a tensão deveria tender ao infinito perto da ponta da
trinca, Griffith concluiu que soluções para problemas de elasticidade linear para um
material frágil contendo trincas talvez possuísse singularidades na ponta da trinca.
De fato, a contribuição fundamental de Griffith [3] é um critério energético para
determinar o caminho `(t) da trinca durante o processo de evolução. Matematicamente, no que diz respeito à teoria de Griffith, `(t) deve satisfazer:
˙ ≥ 0, isto é, a trinca é irreversível;
(a) `(t)
(b) G ≤ ψ, isto é, G não pode exceder ψ;
(1.0.2)
˙ = 0, isto é, a trinca cresce se G igualar-se a ψ.
(c) (G(t, `(t)) − ψ) `(t)
Por volta de 1950, Irwin [5], e quase simultaneamente Orowan [6], notaram que
havia um termo dominante na expansão do campo de tensões numa vizinhança da
ponta da trinca. De acordo com o resultado de Inglis, este termo dominante era de
1
1
ordem r − 2 e tinha uma intensidade K, que Irwin nomeou de fator de intensidade
de tensão. Em 1957, Irwin [7] obteve uma equivalência formal entre a taxa de
liberação da energia de deformação e o fator de intensidade de tensão no contexto
da mecânica da fratura linear elástica. Em 1967, Cherepanov [8] e, em 1968, Rice
[9] desenvolveram independentemente o conceito de uma integral representado o
fluxo de energia na ponta da trinca. Em adição, Rice mostrou que esta integral
era independente do caminho ao redor da trinca. Esta integral ficou conhecida
como integral J. Para um material isotrópico e linearmente elástico, a integral J
coincide diretamente com G. Deste modo, a Mecânica da Fratura Linear Elástica
faz uso das variáveis K, G ou J (para detalhes veja Anderson [10]). No que diz
respeito à capacidade de prever o crescimento da trinca, a teoria de Griffith apresenta
três grandes obstáculos: iniciação da trinca, o caminho da trinca e a suavidade da
evolução da trinca.
Nos anos recentes, matemáticos desenvolveram métodos para prever crescimento
quase-estático em fratura frágil. Em 1998 Francfort e Marigo (veja [11], e [12])
propuseram um modelo variacional de crescimento quase-estático de fratura frágil em
corpos linearmente elásticos inspirados no critério clássico de Griffith (veja também
Bourdin, Francfort e Marigo [13], Dal Maso e Toader [14] e Buliga [15]). Esta
abordagem é usada para o tratamento de processos independentes de taxa (as leis
de governo do problema são invariantes com mudanças da escala no tempo). Neste
caso, a evolução quase-estática do corpo com uma trinca em propagação é obtida ao
minimizar um funcional de energia que é a soma da energia elástica Eb , e da energia
de superfície Es , a saber
E(C, υ(t)) = Eb (C, υ(t)) + Es (C),
(1.0.3)
entre todas as trincas C que contêm todas as anteriores C(s), s < t; e todos o campos
de deslocamento cinematicamente admissíveis
υ = U on ∂d B\C,
com ∂d B ⊂ ∂B, onde ∂B representa a fronteira do corpo, e U um deslocamento
prescrito sobre ∂d B. Portanto, este problema variacional se encaixa no contexto
dos problema de descontinuidade livre, onde o deslocamento e a nova trinca são
desconhecidos. Embora inspirado na teoria de Griffith, o modelo de Francfort e
Marigo, contudo, se livra das restrições daquela teoria, a qual requer uma trinca
preexistente e um caminho de trinca bem definido. Em contraste, pode-se quantificar
a iniciação e o caminho de uma trinca.
O modelo de Francfort e Marigo é, de fato, bem posto, isto é, admite ao menos
um par de solução (u(t), C(t)) (veja Dal Maso e Toader [14], Chambolle [16], Franc2
fort e Larsen [17] ), onde u(t) é o deslocamento, e C(t) é a trinca. O modelo foi
generalizado para o contexto da elasticidade finita por Dal Maso, Francfort, e Toader
[18]. Contudo, a principal desvantagem deste modelo é a incapacidade de lidar com
carregamentos complexos. Esta formulação é propícia à implementação numérica
(veja Bourdin at al [13, 19]), a qual é realizada usando-se um procedimento de discretização no tempo e uma aproximação da energia total proposta por Ambrosio
e Tortorelli [20] via Gama-convergência (para detalhes sobre aproximações gama
convergentes de problemas de descontinuidade livre, veja Dal Maso [21] e Braides
[22, 23]). A aproximação funciona como uma regularização caracterizada pelo fato
que a trinca não é mas uma simples curva, mas um tipo de "camada"com espessura
h() (com dependente das propriedades do material). De fato, a trinca é vista
através de uma variável auxiliar ϕ como uma região onde 0 < ϕ < 1. Esta variável
pode ser considerada como uma variável de dano, ou parâmetro de ordem, que distingue suavemente o material completamente danificado do material virgem. A curva
que descreve a trinca é recuperada fazendo h() tender a zero (veja [13]). Dentro
deste contexto de regularização, Giacomini [24] propôs uma formulação matemática
que envolve o espaço SBV (para maiores detalhes sobre o espaço SBV e os espaços
de sobolev o leitor é convidado a consultar: Adams [25], Evans e Gariepy [26], Ambrosio, Fusco e Pallara [27] ) das funções de variação limitada, e definiu uma noção
de evolução quase-estática para a aproximação elíptica do funcional de MumfordShah [28, 29] proposto por Ambrosio e Tortorelli [20], e conseguiu provar, usando
técnicas da teoria geométrica da medida (veja Federer [30]), que essa evolução regular converge, no sentido da Gama-convergência, para um crescimento quase-estático
de uma trinca em um corpo linearmente elástico, no sentido de Francfort e Larsen
[17]. Em 2007, Del Piero et al [31] reformularam o modelo de Francfort e Marigo
no contexto não-linear elástico e propuseram uma regularização também via Gamaconvergência. Vale salientar que neste novo contexto, como a energia é não-linear,
precisa-se de uma versão generalizada da aproximação de Ambrosio e Tortorelli (veja
Fusco et al [32] e Focardi [33]).
Do ponto de vista da modelagem material, uma abordagem baseada no
parâmetro de ordem está conceitualmente ligada com modelos da mecânica do dano,
veja, por exemplo, Kachanov [34] ou Fremond e Nedjar [35], onde o dano pode ser
interpretado como um parâmetro de ordem. A mecânica do dano (veja Bazant e Oh
[36], de Borst e Nauta [37], Mazars e Pijaudier-Cabot [38], descreve os efeitos locais
de micro-defeitos, isto é, a evolução das propriedades mecânicas do material quando
os micro-defeitos se propagam.
A Mecânica da Fratura e a Mecânica do Dano são duas teorias correlacionadas.
Quando a localização de uma trinca e o caminho pelo qual ela se propaga são desconhecidos, já observamos, que a Mecânica da Fratura pode dificilmente ser usada.
3
Em contraste, a Mecânica do Dano oferece uma vantagem essencial para prever a
localização deste defeito crítico. Portanto, a mecânica do dano é útil para a previsão
da iniciação do defeito, enquanto que a mecânica da fratura pode ser implementada
depois de iniciada a propagação. Contudo, o maior obstáculo para se tentar relacionar a teoria da fratura e a teoria do dano (local) (veja Lemaitre e Cheboche
[39], Lemaitre [40] e Pineau [41]) é que o processo de falha previsto com modelos
da mecânica do dano local ocorre sem dissipação de energia. Portanto, existe uma
inconsistência entre a mecânica do dano (local) que prevê que essa quantidade é
nula e a mecânica da fratura que assume que esta quantidade é finita.
Este paradoxo foi mostrado a quase quarenta anos atrás por Bazant [42], o qual
sugeriu a implementação de teorias não-locais a fim de resolver este impasse. Simo
et al. [43] também identificou este problema e mostrou que os modelos do contínuo
que visavam resolver isso deveriam impor o fato de que a quantidade de energia
dissipada para a criação de um defeito é uma quantidade finita e não nula. Nesta
linha de raciocínio, temos a advento de teorias de dano não-local (veja Simo et
al. [43], Elfgren [44], de Borst et al. [45]) que podem ser consideradas como uma
forma consistente de preencher o espaço que existia entre a mecânica da fratura e a
mecânica do dano. A idéia chave de modelos de dano não-local ou dependentes de
gradiente é admitir que a condição de crescimento do dano é não-local, isto é, que depende, em cada ponto material, de uma média das deformações em uma vizinhança.
Modelos de dano não-local podem, em princípio, contemplar tanto a iniciação da
trinca quanto a propagação de uma trinca. Em 1996, Mazars e Pijaudier-Cabot [38],
através de considerações termodinâmicas, relacionaram a mecânica da fratura e a
mecânica do dano.
O teoria baseada no parâmetro de ordem é uma poderosa ferramenta de simulação para descrever a evolução complexa de interfaces em um vasto contexto, sem
explicitamente seguir estas interfaces. Sua principal aplicação tem sido à problemas
em ciência dos materiais onde a evolução de interfaces e defeitos no interior ou na
superfície de um material têm um profundo impacto no seu comportamento [46].
Uma lista parcial de applicações nessa área inclui solidificação de ligas [47], onde
os modelos combinam elementos dos primeiros modelos baseados no parâmetro de
ordem da solidificação de materiais puros (veja, por exemplo, [48]) com a equação
de Cahn-Hilliard ([49], [50]), nucleação de cristais [51], fratura (veja [52], [53], [54],
[2]). No contexto de fratura frágil, como observamos anteriormente, o parâmetro de
ordem é, de fato, uma variável de dano.
Em mecânica do contínuo, a resposta de um corpo à deformação é descrita pelo
sistema de forças padrão, consistente com as leis de balanço do momento linear
e angular. Essas forças são associadas com o movimento de partículas materiais.
Por outro lado, a resposta de um corpo a mudanças na sua estrutura material
4
associada, por exemplo, à propagaçao de trincas, é descrita pelo sistema de forças
configuracional. De acordo com Gurtin [55], as forças configuracional são vistas
como objetos primitivos básicos consistentes com seu próprio balanço de forças que
realizam trabalho em conjunção com o movimento de defeitos. Já em 1953, uma
derivação variacional das forças configuracional foi obtida por Eshelby [56]. Mais
tarde, em 1995, Gurtin [55] demonstrou o papel das forças configuracional para
diversas teorias de transição de fase (veja, por exemplo: Cermelli e Gurtin [57],
Burke e Turnbull [58]). Além do problema de interface, o trabalho de Gurtin [59]
tem sido aplicado ao problema de fratura: Gurtin e Podio-Guidugli [1]; Gurtin e
Shvartsman [60]; Kalpakides e Descalu [61].
O principal objetivo desta tese é oferecer a possibilidade de relacionar a Teoria
da Fratura e a Teoria do Dano no contexto da elasticidade finita. Nós trabalhamos
com um material frágil denotado por B: um corpo que apresenta comportamento
perfeitamente elástico fora da trinca denotada por C. Efeitos térmicos e inerciais
serão ignorados. Especificamente, iremos mostrar, sob certas hipóteses constitutivas
e uma adimensionalização apropriada, que a teoria do dano (parâmetro de ordem)
para evolução quase-estática de fratura frágil, no contexto da elasticidade finita, proposta por Duda e Souza [2] funciona como uma regularização da teoria apresentada
por Gurtin e Podio-Guidugli [1] para propagação de trinca em corpos elásticos. Vale
ressaltar que em 2009, Hakim e Karma [54] implementaram, no contexto de elasticidade linear, uma teoria dependente de taxa baseada no parâmetro de ordem do
tipo Ginzburg-Landau (para maiores detalhes sobre a equação de Ginzburg-Landau
veja, por exemplo, [62], e Onuki [63]) que pode ser vista como uma regularização da
teoria de propagação de trinca desenvolvida por Gurtin e Podio-Guidugli [1].
Nossa idéia consiste em adaptar o procedimento desenvolvido em Fried e Grach
[64], que implementaram a teoria baseada no parâmetro de ordem para a teoria de
Gurtin e Struthers [65] com respeito ao problema de interface (veja também Fried
e Gurtin [66]). A noção de força configuracional tem um papel central juntamente
com a técnica do Método Assintótico neste procedimento. De acordo com Gurtin e
Podio-Guidugli [1] a equação de governo para a propagação de trinca é obtida do
balanço de força configuracional tangencial
J − ψtip = MV,
(1.0.4)
onde M é a mobilidade da ponta da trinca, V é a velocidade da trinca, ψtip é a
energia de superfície na ponta da trinca, e J é a taxa de liberação de energia de
deformação (a integral J) dada por
J = t·
I
tip
5
Cν ds,
(1.0.5)
onde
I
tip
Cνds = lim+
δ→0
Z
Cνds,
∂Dδ (z)
(1.0.6)
sendo C o tensor de tensões configuracional, definido sobre B\C; t a direção de
propagação prescrita, ∂Dδ (z) a fronteira do disco Dδ (z) de raio δ e centrado na
ponta da trinca z, e ν um campo normal unitário exterior à fronteira ∂Dδ (z). Mais
adiante, neste trabalho, nós veremos que consistência com a versão mecânica da
segunda lei fornecerá
J ≥ ψtip > 0.
(1.0.7)
Deste modo, o critério de Griffith assegura que a trinca se propagará quando e
somente quando
J > ψtip .
(1.0.8)
Dentro deste contexto, a desigualdade (1.0.8), só representa uma condição necessária
para a propagação de trinca; de fato, para a classe de equações constitutivas consideradas, (1.0.8) pode ser satisfeita sem o movimento da ponta da trinca. Contudo, é
importante enfatizar que (1.0.7) e (1.0.8) são independentes de hipóteses constitutivas. Então, o problema de propagação de trinca acima corresponde à descrição do
problema através da mecânica da fratura.
Já para a teoria do dano introduzida, o sistema de forças correspondente consiste
do tensor de tensões configuracional C e de uma densidade de força de corpo configuracional f definidos sobre todo o corpo B. Este sistema deve satisfazer o seguinte
balanço
Z
Z
Cν ds + fda = 0,
(1.0.9)
P
P
para todo P ⊂ B. Dado as equações constitutivas consistentes e uma adimensionalização apropriada, nós mostraremos que
t·
Z
C ν ds → J − ψtip ,
t·
Z
−1 f da → MV,
P
P
(1.0.10)
onde é um parâmetro adimensional que depende das propriedades do material.
Este trabalho é organizado como segue. No capítulo 2, na seção 2.1, apresentamos a teoria da mecânica da fratura para o problema de evolução de trinca desenvolvida por Gurtin e Podio-Guidugli [1]. Na seção 2.2 apresentamos uma teoria
baseada no parâmetro de ordem é apresentada. No capítulo 3, seguindo Fried e
Grach [64], inicialmente introduzimos uma admensionalização das equações da teoria baseada no parâmeto de ordem. Na seção 3.3, o Método Assintótico é usado para
6
expandir as soluções das equações de governo fora da trinca e na camada de transição (que é representa a trinca no contexto da teoria do dano), o que, nas seções
3.4 e 3.6, nos permite estimar as quantidades fora da trinca e dentro da camada
de transição. Então, na seção 3.7, nós recuperamos a lei de propagação de trinca
da teoria de Gurtin e Podio-Guidugli [1] através de um limite assintótico sobre o
balanço de forças configuracional da teoria baseada no parâmetro de ordem especializada por Duda e Souza [2]. Finalmente, as conclusões desta tese serão apresentadas
no capítulo 4.
7
Capítulo 2
Leis Básicas para a Propagação de
Trinca e uma Teoria Baseada no
Parâmetro de Ordem
Na primeira parte deste capítulo será apresentado a descrição do problema de fratura
dada por Gurtin e Podio-Guidugli [1] através da teoria de forças configuracional
fornecendo uma lei de governo para a ponta da trinca. Na segunda parte deste
capítulo será apresentada uma teoria baseada no parâmetro de ordem proposta por
Duda e Souza [2]. Será mostrado mais tarde neste trabalho, que esta teoria pode ser
vista como uma regularização da teoria desenvolvida por Gurtin e Podio-Guidugli
[1].
2.1
Leis Básicas para Propagação de Trinca
2.1.1
Campos Básicos. Leis de Balanço. Segunda Lei
Seja B ⊂ R2 um conjunto fechado com fronteira ∂B. A macrocinemática é descrita
pelo movimento
y : (x, t) 7→ y(x, t),
(2.1.1)
que mapeia a partícula localizada em x ∈ B\C(t), no tempo t, em y(x, t), tal que y
é descontínua em C(t). Denote por
F = ∇y
(2.1.2)
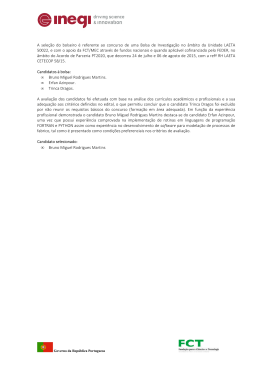
a deformação gradiente consistente com detF > 0. Suponha que B contenha uma
trinca C em propagação, a qual para cada instante t é descrita pela reta C(t) com
um extremo fixo na fronteira ∂B, e com o outro sendo a ponta da trinca z(t), se
8
movendo com velocidade
dz(t)
= V (t)t,
(2.1.3)
dt
com V (t) > 0 a velocidade da trinca, onde t é um vetor tangente unitário à curva
C(t). Por conveniência, trabalhamos com um sistema de coordenadas cartesiano
v(t) =
com origem na ponta da trinca e eixos coordenados definidos por t (direção x) e
pelo vetor m normal à curva C(t) (direção y).
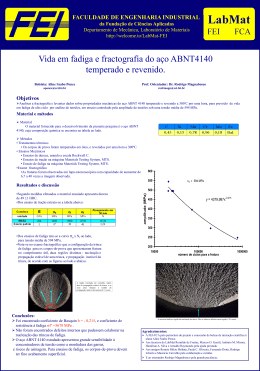
B
m
C (t)
z(t)
t
∂B
Figura 2.1: A trinca em B.
Sejam W densidade de energia elástica, e ψ a densidade de energia de superfície
da trinca. Agora, vamos introduzir o sistema de forças padrão e configuracional.
O sistema de forças padrão é definido pelo tensor de Piola S e pela força de corpo
por unidade de volume b definidos em B\C. Já o sistema de forças configuracional
é definido pelo tensor de tensões C, o qual é definido em B\C, pela força de corpo
interna g C definida em C, pelo vetor tensão de superfície c distribuída sobre C, e da
força configuracional interna g tip concentrada na ponta da trinca.
O campo c representa uma força associada à união das faces da trinca, enquanto
que a força interna g tip mantém a integridade da ponta da trinca e age em resposta
a degradação durante a propagação.
O sistema de forças padrão deve satisfazer os balanços de momento linear e
B
˜
P
•
xA
C˜
•
z
∂˜
P
∂B
Figura 2.2: The volume control in B containing the crack tip.
9
angular
Z
∂P
Z
∂P
Sνds +
Z
P
bda = 0,
y × Sνds +
Z
P
y × bda = 0,
(2.1.4)
com P qualquer subconjunto de B, e ν o campo normal sobre ∂P.
O balanço das forças configuracional é dado por
Z
∂P
Cνds +
Z
P
g Cda + g tip − cA = 0,
(2.1.5)
onde P contém a ponta da trinca em seu interior, G = P ∩ C, e cA = c(xA , t) com
{xA } = ∂P ∩ G (veja 2).
Fora da trinca, as formas locais de momento linear e angular são respectivamente
divS + b = 0,
(2.1.6)
SF T = F S T .
Seja Dδ (z) = {x ∈ B : |x − z| < δ}. Se escolhermos P = Dδ (z), e fizermos
δ → 0, então obteremos a equação de governo para a ponta da trinca
I
tip
Cνds + g tip − ctip = 0,
(2.1.7)
com ctip o limite de c em z, e
I
tip
Cνds = lim
Z
δ→0 Dδ (z)
Cνds.
B
Dδ
C
(t)
δ
z(t)
∂D δ
∂B
Figura 2.3: O disco Dδ contendo a ponta da trinca.
10
(2.1.8)
Seguindo Gurtin [59], para P = P(t) a Segunda Lei é escrita na forma
d
dt
Z
P
W da +
Z
G
ψds ≤ W(P),
(2.1.9)
com P contendo uma porção da trinca, e W(P) sendo a potência realizada em P
dada por
W(P) =
Z
∂P
Cν · vds +
Z
∂P
Sν · y◦ ds +
Z
P
b · ẏda + WC(P),
(2.1.10)
onde WC(P) é a potência associada à trinca, e
y◦ = ẏ + F v
(2.1.11)
é o campo de velocidade seguindo a ponta da trinca e ẏ a velocidade do ponto
material. O termo F v refere-se à velocidade na qual o material deformado está
sendo transferido ao volume de controle deformado.
Fora da trinca, a forma local da Segunda Lei é dada por
Ẇ ≤ S Ḟ .
(2.1.12)
Uma consequência da Segunda Lei formulada em (2.1.9) para um subconjunto
P que não intercepta a trinca, é a relação de Eshelby
C = W I − F TS
(2.1.13)
para a tensor de tensões configuracional, onde F T é o tensor transposto do gradiente de deformação F , e I o tensor unitário. Esse resultado é uma consequência do
requerimento de que a Segunda Lei seja invariante sob mudanças na parametrização da fronteira ∂P(t) (ver [59] página 42 − 43), e é independente das equações
constitutivas satisfeitas por W e S. O mesmo requerimento produz
c · t = ψ,
(2.1.14)
o que significa a equivalência entre a componente tangencial do vetor tensão de
superfície e densidade de energia de superfície da trinca.
Seguindo [59], e levando em conta (2.1.14), segue de (2.1.7) o balanço configuracional tangencial
J − ψtip + t · g tip = 0,
(2.1.15)
onde,
ψtip = lim ψ, J = t ·
x→z
I
tip
11
Cν ds, ctip = t · g tip ,
(2.1.16)
e
f = J − ψtip ,
(2.1.17)
o que reprsenta um balanço entre a força motriz f e −t · gtip , a força interna que se
opõe ao movimento da ponta da trinca.
A diferença
d
Γ(P) = W(P) −
dt
Z
P
W da −
Z
G
ψds ≥ 0
(2.1.18)
então representa a energia dissipada em P por unidade de tempo. Se definirmos
Γtip = lim Γ(Dδ ),
(2.1.19)
−Γtip = g tip · v ≤ 0,
(2.1.20)
δ→0
então
o que representa a Segunda Lei localizada na ponta da trinca.
Por (2.1.20), obtemos a seguinte relação para a energia dissipada na ponta da
trinca:
Γtip = fV ≥ 0.
(2.1.21)
Como g tip está relacionada à quebra das ligações, é bem razoável supor que a
propagação é acompanhada por uma força de resistência dependente da velocidade
V . Desta forma, introduzimos a equação constitutiva
f = MV,
(2.1.22)
com M > 0 representando a mobilidade na ponta da trinca.
Portanto (??)3 lê-se
MV = J − ψtip .
(2.1.23)
Fora da trinca, o material é assumido ser não-linear, elástico e homogêneo, tal
que
∂
Ŵ (F ),
(2.1.24)
W = Ŵ (F ), S = Ŝ(F ) =
∂F
e a Segunda Lei é trivialmente satisfeita.
2.2
Uma Teoria Baseada no Parâmetro de Ordem
Nesta seção, nós introduzimos uma teoria baseada em um parâmetro de ordem, veja,
por exemplo Duda e Souza [2], e mais a frente mostraremos que a mesma funciona
como uma regularização da teoria desenvolvida por Gurtin e Podio-Guidugli [1] para
o problema de propagaçao na ponta da trinca. Nós consideramos uma teoria para
fratura na qual um parâmetro de ordem, denotado por ϕ, distingue suavemente o
12
material completamente danificado do material virgem. Sem perda de generalidade,
suponhamos que ϕ varia no intervalo fechado [0, 1], com os limites inferior e superior
correspondendo respectivamente ao material completamente danificado e ao material
virgem.
2.2.1
Campos Básicos. Leis de Governo. Segunda Lei
Considere o corpo B descrito cinematicamente pelo movimento y e o parâmetro de
ordem ϕ. Sejam
F = ∇y e p = ∇ϕ
(2.2.1)
os gradientes de deformação e do parâmetro de ordem.
A teoria baseada no parâmetro de ordem que introduzimos é descrita pelos
seguintes campos:
W densidade de energia livre,
S tensor de tensões de Piola,
b densidade de força de corpo,
(2.2.2)
ξ vetordemicrotensão,
π densidade de microforça interna,
definidos sobre todo o corpo.
Para todo P em B em cada instante, esses campos devem satisfazer as seguintes
leis integrais
Z
Z
Sνds + bda = 0,
P
∂P
Z
∂P
Z
∂P
y × Sνds +
ξ · νds +
Z
P
Z
P
y × bda = 0,
(2.2.3)
πda = 0,
para os balanços de momentos linear e angular, e o de microforças.
A versão mecânica da segunda lei é dada por1
Z
∂P
1
Sν · ẏds +
Z
P
b · ẏda +
Z
∂P
ξ · (ϕ̇ν))ds ≥
Z
˙
Wda.
P
Como π age internamente a P, este campo não contribui para a potência em (2.2.4).
13
(2.2.4)
As formas locais das leis acima são dadas por
divS + b = 0
SFT = FST
(2.2.5)
divξ + π = 0,
Ẇ − S · Ḟ + π ϕ̇ − ξ · ṗ ≤ 0.
2.2.2
Equações Constitutivas
Na teoria baseada no parâmetro de ordem, W, S, ξ, e π são dados por funções
respostas dependendo do gradiente de deformação F, do campo de fase ϕ, do seu
gradiente p, e da sua taxa ϕ̇. Consistência com a Segunda Lei (2.2.4) então requer
que
∂ Ŵ(F, ϕ, p)
∂ Ŵ(F, ϕ, p)
, ξ=
,
W = Ŵ(F, ϕ, p), S =
∂F
∂p
(2.2.6)
∂ Ŵ(F, ϕ, p)
π=−
− β̂(F, ϕ, p, ϕ̇)ϕ̇,
∂ϕ
Onde o coeficiente cinético β̂(F, ϕ, p, ϕ̇) deve ser não-negativo. Desse modo, ao
inserir as relações (2.2.6)1,3,4 no balanço local de microforças (2.2.5)3 , deduzimos a
equação de evolução do parâmetro de ordem
β̂(F, ϕ, p, ϕ̇)ϕ̇ = div
∂ Ŵ(F, ϕ, p)
∂p
−
∂ Ŵ(F, ϕ, p)
.
∂ϕ
(2.2.7)
Sendo dadas as equações constitutivas (2.2.6), e fazendo uso do balanço de momento linear (2.2.3)1 , angular (2.2.3)3 e o de microforças (2.2.3)3 , nós obtemos que
Z
∂P
Cνds +
Z
P
fda = 0,
(2.2.8)
para todo P de B, tal que sua forma local é dada por
onde
divC + f = 0,
(2.2.9)
C = WI − FT S − p ⊗ ξ,
(2.2.10)
f = β ϕ̇p.
14
2.2.3
Especialização Constitutiva
Nós trabalhamos com o caso onde a relação constitutiva determinada pela densidade
de energia livre é dada por
λ
W = Ŵ(F, ϕ, p) = f(ϕ) + W(F)g(ϕ) + |p|2 , com λ > 0.
2
(2.2.11)
Esta é uma escolha comum para a resposta da densidade de energia livre ( veja
Duda e Souza [2]).
Nós adimitimos que f é um potencial com mínimo em ϕ = 1, isto é,
f 0 (1) = 0, e 0 = f (1) < f (ϕ), para 0 < ϕ < 1.
(2.2.12)
Portanto, esta estrutura de f dá preferências energéticas às regiões onde ϕ = 1, e o
termo gradiente 12 λ|p|2 penaliza oscilações para 0 < ϕ < 1.
É natural admitir que a função g seja tal que
g 0(ϕ) > 0, com g(0) = 0 e g(1) = 1.
(2.2.13)
A hipótese de que g(0) = 0 nos diz que o corpo perde a capacidade de armazenar
energia elástica na trinca. Já, o fato de pedirmos que g(1) = 1 nos diz que a
densidade de energia livre coincide com a densidade de energia elástica fora da
trinca. Finalmente, a hipótese de que g seja monótona é necessária para controlar
o gradiente de deformação na trinca.
Se ϕ̂(y, t) = ϕ(x, t), com y = x − z(t), então a derivada parcial
◦
ϕ (x, t) = ∂ ϕ̂(y, t)/∂t,
(2.2.14)
representa a derivada temporal ϕ(x, t) seguindo a ponta da trinca z(t); pela regra
da cadeia
◦
ϕ (x, t) = ϕ̇ + ∇ϕ · v,
(2.2.15)
onde
se admitirmos que
ϕ̇(x, t) = ∂ϕ(x, t)/∂t.
(2.2.16)
◦
ϕ (x, t) = 0,
(2.2.17)
ou seja, que o dano não varia com a ponta da trinca, então
ϕ̇ = −p · v.
(2.2.18)
Nós também admitimos que o coeficiente cinético é uma constante positiva, i.e,
15
β > 0. Daí, a equação constitutiva (2.2.11), e a hipótese (2.2.17) produzem
−β∂x ϕV = λ4ϕ − f 0 (ϕ) − W (F)g 0 (ϕ),
(2.2.19)
∂x ϕ = p · t,
(2.2.20)
onde
denotando a derivada parcial de ϕ na direçao x.
16
Capítulo 3
Regularização e Resultados
Obtidos
3.1
Decomposição dos Campos em Componentes
de Volume e Excesso
Como a estrutura do potencial f dá preferências energéticas à região onde ϕ = 1,
temos que o termo
λ
f (ϕ) + |∇ϕ|,
2
não contribui para a energia livre fora da camada de transição. Contudo, contribui
para a energia na camada de transição, onde 0 < ϕ < 1. Daí, seguindo Fried e
Grach [64], nós decompomos a densidade de energia como uma soma
W = Wbu + Wxs ,
(3.1.1)
dos termos de Volume (bu) e Excesso xs, definidos por
Wbu = Ŵbu (F, ϕ) = W(F)g(ϕ),
W
xs
= Ŵ
xs
λ
= f(ϕ) + |p|2 ,
2
(3.1.2)
respectivamente.
Portanto, usando as equações constitutivas (2.2.6), a decomposição (3.1.1) de
Ψ leva à decomposição natural do tensor de deformação S e da microtensão ξ em
componentes de Volume e Excesso. Especificamente, se tem que
S = Sbu + Sxs , ξ = ξ xs .
(3.1.3)
Desse modo, devido a decomposição (3.1.1) e as relações constitutivas (2.2.6),
17
encontramos que
Sbu =
ξ
xs
∂ Ŵbu
,
∂F
Sxs = 0,
(3.1.4)
∂ Ŵxs
=
.
∂p
As decomposições (3.1.1), (3.1.2), (3.1.3), (3.1.4) dos campos W, S, e ξ produzem,
combinadas com a (2.2.10)1 , a decomposição
C = Cbu + Cxs
(3.1.5)
do tensor de tensões configuracional C em componentes de Volume e Excesso, com
Cbu = Wbu I − FT Sbu ,
Cxs = Wxs I − p ⊗ ξ xs .
(3.1.6)
Desde que a densidade gradiente λ2 |p|2 contribui somente para termos de Excesso,
temos que
f = f xs ,
(3.1.7)
f xs = β∂x ϕV p.
(3.1.8)
e, usando (2.2.17) e (2.2.20), com
3.2
Adimensionalização
Considere os parâmetros µ e ν definidos por
µ=
∂ 2 Ψbu
(F, 1)
2
∂F
, ν = λ.
(3.2.1)
F=I
Nós assumimos que µ e ν produzem um pequeno parâmetro adimensional
0<=
ν
<< 1,
µL2
(3.2.2)
onde L é o comprimento característico. Denotando os campos com dimensão por
um asterisco, então temos
x∗
x= ,
L
t∗
t= ,
T
y (x, t) =
1 ∗ ∗ ∗
y (x , t ), ϕ (x, t) = ϕ∗ (x∗ , t∗ ),
L
18
(3.2.3)
onde T é o tempo característico. Por outro lado, assumimos que
−1 f (ϕ ) =
f ∗ (ϕ∗ )
,
µ
W ∗ (F∗ )
,
W (F ) =
µ
λ∗
,
λ =
µL2
(3.2.4)
β∗
β=
,
µT
−1
g(ϕ ) = g(ϕ∗ ),
Para (2.2.18) esta adimensionalização produz
ϕ̇∗ =
1
ϕ̇ ,
T
(3.2.5)
onde
ϕ̇ = −p · v,
(3.2.6)
com
T
T
V t = v.
L
L
Essa adimensionalização também resulta nas relações
v∗ = V ∗ t∗ =
Wbu∗ = µWbu , Sbu∗ = µSbu
,
Cbu∗ = µCbu
,
(3.2.7)
(3.2.8)
bu
com Wbu , Sbu
, e C dados por
Wbu = W (F )g(ϕ ),
Sbu
=
∂Wbu
,
∂F
(3.2.9)
T bu
bu
Cbu
= W I − F S .
Da mesma forma, segue que
Wxs∗ = µWxs ,
Cxs∗ = µCxs
,
µ
f xs∗ = −1 f xs
,
L 19
ξxs∗ = µLξxs
,
(3.2.10)
onde
λ
|p |2 ,
2
λ
−2
Cxs
|p |2 I − λp ⊗ p ,
= f(ϕ )I +
2
Wxs = −2 f(ϕ ) +
(3.2.11)
ξxs
= λp ,
f xs
= β∂x ϕ V p .
Vale ressaltar que a densidade de energia livre adimensionalizada é dada por
W =
W∗
1
= −1 f(ϕ ) + W (F )g(ϕ ) + λ|p |2 .
µ
2
(3.2.12)
A equação (3.2.12) mostra a similaridade desta escolha com a densidade de energia
livre no contexto da aproximação variacional para problemas de descontinuidade
livre dada por Ambrosio e Tortorelli [20], tal que o termo funcional associado com
1
−1 f (ϕ ) + λ|p |2
2
é do tipo Modica-Mortola (see [29]).
A equação que governa a evolução de ϕ (2.2.7) se torna
−−1 β∂x ϕ V = λ4ϕ − −1 f 0 (ϕ ) − W (F )g 0 (ϕ ).
(3.2.13)
(3.2.14)
Para o balanço de força configuracional (2.2.8), usando as identidades (3.2.8)3 e
(3.2.10)3,6 , tem-se que
Z
(Cbu
∂P
+
Cxs
)ν
ds +
Z
P
−1 f xs
da = 0.
(3.2.15)
Finalmente, se denotarmos a região relativa à coordenada com dimensão x∗ por
B∗ , e por B a região relacionada à coordenada adimensional x, nós escrevemos que
da =
1 ∗
da ,
L2
ds =
1 ∗
ds ,
L
(3.2.16)
para a medida de área e de comprimento de arco associados com um subconjunto P
de B e sua fronteira ∂P.
3.3
Expansões e o Método Assintótico
Seja P ⊂ B, tal que, a cada instante, este conjunto consiste de duas regiões em
evolução: L (x, t) e B (x, t), definidas por L (x, t) = {x ∈ B ∩P : 0 < ϕ (x, t) < 1},
chamada de camada de transição, e B (x, t) = {x ∈ B∩P : 1−O() ≤ ϕ (x, t) ≤ 1}.
20
Bε
ε
U
P
U
P
Bε
C
ε
Figura 3.1: As duas regiões em evolução dentro de P.
Suponhamos que a espessura h() de L tende a zero com , mas a uma razão
ligeiramente mais lenta, a saber
lim h() = 0,
→ 0+
lim −1 h() = +∞,
→ 0+
(3.3.1)
e que o limite
P ∩ C(t) = lim L (x, t)
→0
(3.3.2)
existe, com P ∩ C ⊆ L para cada > 0.
Como
P = B (x, t) ∪ L (x, t),
(3.3.3)
então uma consequência imediata de (3.3.2), é que
P \ C(t) = lim B (x, t).
→0
(3.3.4)
Para cada x ∈ L , fora do eixo de propagação, existe uma única curva normal
a curva de nível de ϕ , passando por x. Além disso, assumimos que esta curva
só corta o eixo de propagação (direção x) uma vez. Daí, nós escrevemos l(x, t) o
comprimento de arco do ponto, associado com esta curva, onde
l(x, t) > 0 para x acima do eixo,
e
l(x, t) < 0 para x abaixo do eixo,
e convenientemente
l(x, t) = 0,
21
nε
(l,x)
w
m
l=0
0
x
(-l,x)
Figura 3.2: O sistema de coordenadas na camada de transição: w(x, t) representa
o único vetor normal à curva de nível do parâmetro de ordem que passa por x, i.e,
∇ϕ
w(x, t) · p (x, t) = 0. Onde o campo n = |∇ϕ
é definido em (3.5.2).
|
para os pontos sobre o eixo. Então, a aplicação
x 7→ (x, l)
está bem definida.
−
Denote L+
= {x ∈ L : l(x, t) > 0}, e L = {x ∈ L : l(x, t) < 0}. Suponhamos
que a região L é suficientemente fina tal que em seu interior a aplicação x 7→ (x, l)
é injetiva. Então, em termos do sistema de coordenada (l, x), o campo ∇l pode ser
assumido independente de l. Neste sentido, ∇l é intrínseco e satisfaz
∇l = m, sobre L+
,
(3.3.5)
∇l = −m, sobre L−
.
(3.3.6)
e
Para cada campo de interesse, nós introduzimos uma expansão externa
q (x, t) = q0out (x, t) + q1out (x, t) + O(2 ),
(3.3.7)
válida em B , e uma expansão interna
q (x, t) = q0in (r, x(x, t), t) + q1in (x(x, t), r, t) + O(2 ),
(3.3.8)
válida na camada de transição L , com
r(x, t) = −1 l(x, t).
(3.3.9)
Desta forma, como as regiões L e B não são disjuntas, por hipótese, a região
L ∩B representa conjuntos onde a expansão externa e interna coincidem. Portanto,
para cada x = (x, l) ∈ L ∩B somos levados a definir a seguinte condição do Método
22
Assintótico
lim q0out (x, l, t) = lim q0in (x, r, t),
r→ ±∞
l→0±
(3.3.10)
relacionando as expansões dentro da região de coincidência.
Nós admitimos que se pode escrever ∇q = ∇q0out + ∇q1out + O(2 ) em B , para
a expansão externa, e q́ = q́0in + q́1in + O(2 ), válida sobre L \{(x, 0) : x ≤ 0}, para
a expansão interna, onde o valor em (x, r, t) de q́ é determinado por
q́(x, r, t) =
3.4
∂q
(x, r, t).
∂r
(3.3.11)
Estimativas fora da Trinca
Consistência implica que ϕ tem um limite quando → 0+ , e que este limite coincide
com 1, fora da trinca, e com 0 na trinca. Então isto força que
ϕout
0 = 1 sobre B ,
e consequentemente que
ϕ = 1 + O() sobre B (x, t),
(3.4.1)
g(ϕ) = 1 + O() sobre B (x, t),
(3.4.2)
ϕ̇ , p = O() sobre B (x, t).
(3.4.3)
que
e, em seguida, que
A hipótese (2.2.12) combinada com (3.4.1)implicam que
f (ϕ ) = o() sobre B (x, t).
(3.4.4)
Analogamente, no limite y deve coincidir com y, correspondendo ao movimento
(2.1.1), isso implica que yout
0 = y. Daí, nós chegamos à estimativa
y = y + O() em B (x, t),
(3.4.5)
F = F + O() em B (x, t),
(3.4.6)
da qual nós obtemos
com F definido em (2.1.2).
As estimativas fora da trinca (3.4.2) e (3.4.6) para g(ϕ ) e F , combinadas com
23
bu
as expressões (3.2.9)1,2,3 , para Wbu , Sbu
, e C , produzem
Wbu = W(F ) + O() em B ,
Sbu
= S + O() em B ,
(3.4.7)
Cbu
= C + O() em B .
Finalmente, usando as estimativas (3.4.4), (3.4.3) com as expressões (3.2.11)1,2,4 ,
obtemos que
Wxs , Cxs
(3.4.8)
= O(1) sobre B ,
e que
−1 f xs
= O() sobre B .
3.5
(3.4.9)
Estimativas dentro da Camada de Transição
Na teoria baseada no parâmetro de ordem, a trinca pode ser descrita como o conjunto
onde ϕ está variando entre 0 e 1, denominado de camada de transição, daí resulta
que é natural considerar os conjuntos dependentes do tempo
{x : ϕ (x, t) = constante}.
(3.5.1)
Eles são convenientemente nomeados de curvas de nível. Como ϕ é suficientemente suave, e não-constante, se tem que ∇ϕ deve ser não-nulo, portanto
n =
∇ϕ
|∇ϕ |
(3.5.2)
representa um campo normal unitário para as curvas de nível de ϕ , e daí
P = I − n ⊗ n
(3.5.3)
projeta campos vetoriais nas suas componentes tangenciais às curvas de nível de ϕ .
Como m é um vetor unitário que é normal ao eixo de propagação, então o campo
tensorial
P = I−m⊗m
(3.5.4)
projeta vetores sobre o eixo de propagação.
Dado um campo escalar q, então
∇q = ((∇q) · ∇l)∇l + ((∇q) · w)w,
24
(3.5.5)
onde w é o vetor normal unitário da única curva normal que satisfaz w · n = 0,
com (∇q) · ∇l em (l, x, t) dado por
(∇q(l, x, t)) · ∇l(l, x, t) =
∂q
(l, x, t).
∂l
(3.5.6)
Portanto, a identidade (3.5.5), as hipóteses (3.3.5) e (3.3.6), e a relação (3.3.9)
entre l e r implicam que
∇q = −1 q́m + ((∇q) · w)w sobre L+
,
∇q = −−1 q́m + ((∇q) · w)w sobre L−
.
(3.5.7)
Desta maneira, aplicando (3.5.7) a expansão interna de ϕ , temos que
in
+
p = −1 ϕ́in
0 m + ϕ́1 m + O() sobre L ,
in
−
p = −(−1 ϕ́in
0 m + ϕ́1 m) + O() sobre L .
(3.5.8)
−
Daí, sobre L+
∪ L , temos que
2
−1 in in
|p |2 = −2 |ϕ́in
0 | + 2 ϕ́0 ϕ́1 + O(1),
in
in
|p | = −1 |ϕ́in
0 | + (sgn(ϕ́0 ))ϕ́1 + O(),
00
(3.5.9)
00
−1 in
4ϕ = div(p ) = −2 ϕin
0 + ϕ1 + O(1).
Usando as estimativas (3.5.8) e (3.2.6), nós obtemos que
−
ϕ̇ = O() on L+
∪ L .
(3.5.10)
Portanto, as estimativas (3.5.8) e (3.5.9)2 produzem
n =
p
+
−
= (sgn(ϕ́in
0 ))m + O() sobre L ∪ L ,
|p |
(3.5.11)
e então
−
P = P + O() sobre L+
∪ L .
(3.5.12)
Lembrando da forma como w (veja figura 3.2) é determinado, segue diretamente
de (3.5.12) que
−
P (w) = sgn(w · t)t + O() sobre L+
∪ L .
(3.5.13)
Por conveniência, nós estimamos a quantidade (3.2.11)4 na direção de propagação e
obtemos que
−1
in 2
t · −1 f xs
= β|∂x ϕ0 | V + O(1)sobre L .
25
(3.5.14)
1
0
η
Figura 3.3: O gráfico da solução interna do parâmetro de ordem.
3.6
Equipartição da Energia e suas Consequências
Usando as estimativas (3.5.9)3 e (3.5.10) combinadas com a expansão interna de
ϕ na equação de evolução (3.2.14) e negligenciando termos de O(1) e menores,
−
in
sobre L+
∪ L , se tem que ϕ0 deve ser uma solução da seguinte equação diferencial
ordinária
00
0
in
λϕin
(3.6.1)
0 = f (ϕ0 ).
Em seguida, usando a condição do Método Assintótico (3.3.10) e o fato que
ϕout
0 = 1 em B , nós encontramos que
ϕin
0 → 1 quando r → ±∞,
(3.6.2)
junto com
00
in
ϕ́in
0 → 0 e ϕ0 → 0 quando r → ±∞.
(3.6.3)
Desde que as condições de contorno (3.6.2) e (3.6.3)1 se asseguram, então a equação
diferencial (3.6.1) possue uma primeira integral
1
2
in
+
−
λ|ϕ́in
0 | = f (ϕ0 ) sobre L ∪ L .
2
(3.6.4)
A expressão em (3.6.4) pode ser interpretada como uma expressão da equipartição
da densidade de energia livre dentro da camada (a menos de termos em O()), entre
o potencial f e a densidade de energia gradiente 12 λ|∇ϕ |2 . Em seguida, para cada
x e t, nós definimos
com
ϕin
0 (x, r, t) = φ(η)
(3.6.5)
r
η=√ ,
λ
(3.6.6)
então φ é a única solução do problema
26
2
1 dφ(η) = f (φ) sobre (−∞, 0) ∪ (0, +∞),
2 dη lim φ(η) = 1,
η→±∞
(3.6.7)
lim φ(η) < +∞.
η→0
De (3.6.7) nós obtemos que
ϕ́in
0 > 0 sobre (0, +∞),
ϕ́in
0 < 0 sobre (−∞, 0),
(3.6.8)
de onde concluímos que
n = m + O() sobre L+
,
n = −m + O() sobre L−
.
(3.6.9)
Desde que f e f 0 se anulam em ϕ = 1, isto implica que existe um α > 0,
independente de r, tal que
−α|r|
ϕ́in
) quando |r| → +∞;
0 (., r) = O(e
(3.6.10)
daí concluímos que ϕ́in
0 (r, .) é quadrado integrável sobre (−∞, +∞) como uma função
de r (deve estar claro o fato que isto diz respeito a integração imprópria, pois ϕ́in
0
não está definida em r = 0). Nós admitimos que ϕin
0 deve satisfazer
ϕin
0 (x, 0) = 1 − O(), for x > 0,
ϕin
0 (x, 0) = O(), for x ≤ 0.
(3.6.11)
Portanto, combinando (3.6.7)2 com (3.6.11) temos que
Z
+∞
Z
+∞
√
−∞
−∞
√
2
λ|ϕ́in
0 (x, r)| dr
2
λ|ϕ́in
0 (x, r)| dr
=2
Z
1
=2
Z
1
O()
q
1−O()
2f (φ)dφ = 2
Z
0
1
q
2f (φ)dφ + O(), para x ≤ 0,
q
2f (φ)dφ = O(), para x > 0.
(3.6.12)
Por conveniência, nós definimos
√ Z 1q
ψ=2 λ
2f (φ)dφ
0
(3.6.13)
e, se reescrevêssemos em termos das quantidades com dimensão, ψ carregaria di27
mensão de energia livre por unidade de área, segue de (3.6.12)1 que
Z
+∞
−∞
2
λ|ϕ́in
0 (x, r)| dr = ψ + O(), para x ≤ 0.
(3.6.14)
Usando as estimativas (3.5.8) e (3.5.9) na expressão (3.2.11)2 para Cxs
, junto com a
relação (3.6.4), têm-se que
−1
in 2
+
+
Cxs
= λ|ϕ́0 | P + O(1) sobre L ∪ L .
3.7
(3.6.15)
Limite Assintótico das Leis de Governo da
Teoria Baseada no Parâmetro de Ordem
ν
δ
m
w
t
z(t)
Figura 3.4: O disco de raio δ centrado na ponta da trinca.
Fixemos P = Dδ (z). Nós iremos mostrar nesta seção que o balanço tangencial
J − ψtip + t · g tip = 0,
é obtido assintóticamente de
t·
Z
∂Dδ (z)
(Cbu
+ Cxs
)νds +
Z
Dδ (z)
!
−1 f xs
da = 0,
(3.7.1)
com ν um campo unitário normal à fronteira do disco. Junto com as estimativas
das quantidades envolvidas, a integral
t·
Z
∂Dδ (z)
Cbu
ν ds,
(3.7.2)
no limite quando δ → 0+ , resulta na integral J:
J =t·
I
Cνds.
∂Dδ (z)
28
(3.7.3)
Por outro lado, a integral
t·
Z
∂Dδ (z)
Cxs
ν ds
(3.7.4)
produz a energia de superfície ψ. E, por último, a integral
t·
Z
∂Dδ (z)
−1 f xs
ds
!
(3.7.5)
fornece
(3.7.6)
t · g tip .
3.7.1
A taxa de liberação de energia de deformação
Para a primeira integral do lado esquerdo de (3.7.1), nós escrevemos
Z
∂Dδ (z)
+
Z
−
Z
xs
(Cbu
+ C )νds =
∂? L
Z
∂? B
xs
(Cbu
+ C )νds
xs
(Cbu
+ C )νds
∂? B ∩∂? L
(3.7.7)
xs
(Cbu
+ C )νds,
onde ∂? L = ∂L ∩ ∂Dδ e ∂? B = ∂B ∩ ∂Dδ .
Fazendo uso de(3.4.7)3 e (3.4.8)2 na primeira integral do lado direito de (3.7.7)1
temos que
Z
∂? B
=
xs
(Cbu
+ C )νds =
Z
∂? B
Z
∂? B
Cbu
νds +
Z
∂? B
Cxs
νds
(3.7.8)
Cνds + O(),
e usando (3.3.4), chegamos à
t·
3.7.2
Z
∂? B
xs
(Cbu
+ C )νds = t ·
I
∂Dδ (z)
Cνds + O().
(3.7.9)
A energia de superfície
Fazendo uso de (3.3.9) e (3.6.15), nós chegamos à
t·
Z
∂? L
= t·
Z
Cxs
νds
−1 h()
2
−
−1 h()
2
= t·
Z
h()
2
−
h()
2
2
λ|ϕ́in
0 | P νdr
29
2
−1 λ|ϕ́in
0 | P νdl + o()
(3.7.10)
+ o().
Como L é suficientemente fino, é razoável admitir que para cada x = (x, r) ∈
∂? L tal que r 6= 0, ν(x) coincide com w(x) (veja figura 5). Daí, usando a estimativa
(3.5.13), nós obtemos que
t·
Z
∂? L
Cxs
νds
=−
Z
−1 h()
2
−
−1 h()
2
2
λ|ϕ́in
0 | dr + O().
(3.7.11)
Usando a equação da equipartição de energia (3.6.14) combinada com a hipótese
(3.3.1)2 , nós temos que
t·
Z
Cxs
νds = −ψ + O().
∂? L
(3.7.12)
Nosso próximo passo é analizar a contribuição da integral de Cbu
na camada de
transição, i.e,
Z
∂? L
Cbu
νds =
Z
∂? L
bu
(Wbu I − FT
· S )νds
=
Z
Wbu Iνds
=
Z
g(ϕ )W (F )Iνds −
∂? L
∂? L
−
Z
∂? L
bu
FT
· S νds
Z
∂? L
FT
g(ϕ ) ·
(3.7.13)
∂W (F )
νds.
∂F
Como é esperado que W (F ) deva crescer dentro da camada de transição à medida que → 0+ , poderíamos ter problemas para calcular, por exemplo, a primeira
integral de (3.7.13)3 , isto é,
Z
∂? L
g(ϕ )W (F )ds,
(3.7.14)
especialmente no contexto da elasticidade linear. A fim de compensar este comportamento de W (F ), e tornar a integral
t·
Z
∂? L
Cbu
νds
(3.7.15)
negligente na camada, observemos que
0 = g(0)
Z
∂? L
W (F )dl ≤
Z
∂? L
g(ϕ )W (F )dl ≤
Z
∂? L
W (F )dl,
(3.7.16)
portanto, desde que g(0) = 0 temos que a integral (3.7.13)3 é limitada inferiormente.
O fato de g ser monótona crescente controla o crescimente de W (F ). A mesma
análise pode ser feita para a segunda integral de (3.7.13)3 .
30
Portanto para uma escolha adequada da função g podemos concluir que
t·
Z
∂? L
xs
(Cbu
+ C )νds = −ψ + o(1).
(3.7.17)
Como ∂? B ∩ ∂? L ⊂ ∂? B e ∂? B ∩ ∂? L ⊂ ∂? B , então
Z
t ·
(Cbu
∂? B ∩∂? L
≤
Z
t ·
∂? L
Cxs
)νda
+
Cbu
νda
Z
+ t ·
∂? B
(Cxs
ν)da
(3.7.18)
e daí, como admitimos uma escolha adequada de g tal que a primeira integral
(3.7.18)2 não contribue dentro da camada de transição, temos que esta hipótese
junto com a estimativa (3.4.8)2 implicam que a integral (3.7.7)3 é negligente.
3.7.3
A cinética
A segunda integral no lado esquerdo de (3.7.1) é dada por
Z
Dδ (z)
−
Z
Z
−1 f xs
da =
B ∩L
B
−1 f xs
da +
Z
L
−1 f xs
da.
−1 f xs
da.
(3.7.19)
Usando a estimativa (3.4.9) na primeira integral no lado direito de (3.7.19)1 , obtemos
que
t·
Z
−1 f xs
da = o().
B
(3.7.20)
A seguir, fazendo uso da estimativa (3.5.14) junto com a relação (3.3.9) na segunda
integral no lado direito de (3.7.19)1 temos que
t·
Z
L
=−
−1 fxs da
Z
+∞
Z
+∞
= − β
=− β
−∞
−∞
Z
Z
+∞
Z
−∞
−1 h()
2
−1 h()
−
2
+∞
−∞
h()
2
Z
−
h()
2
2
−1 β|∂x ϕin
0 | V dldx + o(1)
2
−1 |∂x ϕin
0 | drdx V + o(1)
2
|∂x ϕin
0 | drdx
(3.7.21)
V + o(1),
e se admitirmos que a integral
Z
+∞
−∞
Z
+∞
−∞
2
|∂x ϕin
0 | drdx
31
(3.7.22)
é uma constante de ordem unitária, então podemos definir
M =β
Z
+∞
−∞
Z
+∞
−∞
2
|∂x ϕin
0 | drdx > 0,
(3.7.23)
e consequentemente
t·
Z
L
−1 fxs da = −MV + o(1).
(3.7.24)
Como B ∩ L ⊂ B e (3.4.9) se assegura, então
Z
t ·
B ∩L
≤
Z
B
−1 f xs
da
≤
Z
B ∩L
|t · −1 f xs
|da
(3.7.25)
|t · −1 f xs
|da
= o(),
e daí a integral (3.7.19)2 é negligente.
Finalmente, usando os resultados (3.7.9), (3.7.17), e (3.7.24) na equação (3.7.1)
, e fazendo δ → 0+ , nós chegamos ao balanço configuracional tangencial
J − ψtip = MV
como estabelecido na teoria de Gurtin e Podio-Guidugli [1].
32
(3.7.26)
Capítulo 4
Conclusões
A análise apresentada nesta tese mostra que uma teoria do parâmetro de ordem,
fornecida escolhendo-se
λ
Ŵ(F, ϕ) = f (ϕ) + W (F)g(ϕ) + |p|2 , e β̂(F, ϕ, p, ϕ̇) = β > 0,
2
(4.0.1)
onde f é um potencial com mínimo em ϕ = 1 e g é uma função monótona crescente
consistente com g(0) = 0 e g(1) = 1, pode ser vista como uma regularização da
teoria de Gurtin e Podio-Guidugli [1], a qual é determinada pelas funções respostas
W , ψtip , e M, com
√ Z 1q
2f (φ)dφ,
ψ=2 λ
0
M =β
Z
+∞
−∞
Z
+∞
−∞
2
|∂x ϕin
0 | drdx
(4.0.2)
> 0,
sendo ∂x ϕin
a derivada na direção de propagação (direção x) do termo de ordem
zero da expansão assintótica de ϕ dentro da camada de transição, e r a coordenada
definida na seção 3.3.
Como f e g possuem as propriedades qualitativas descritas anteriormente, a
correspondência assintótica estabelecida aqui não depende das características particulares dessas funções, pois isso permite escolhas de f e g que facilitam a análise
e/ou cálculo. Essa liberdade deve ser vista não como um defeito, mas sim, como
uma força da regularização através da teoria do campo de fase.
Portanto, especificamente, dado uma adimensionalização apropriada e equações
constitutivas consistentes com (4.0.1), e (4.0.2), então a teoria baseada no parâmetro
de ordem produz, como um limite assintótico, uma teoria coincidente com aquela
proposta por Gurtin e Podio-Guidugli. Isto sugere que, com diferentes hipóteses
constitutivas e/ou adimensionalizações, a teoria baseada no parâmetro de ordem
pode prover uma estrutura para derivar teorias globais que diferem da teoria de
Gurtin e Podio-Guidugli.
33
Apêndice A
Cálculo das Estimativas
Dizemos que p(x) = O(q(x)) quando x → a, se existe uma constante A > 0 tal que
|p(x)| ≤ A|q(x)| em alguma vizinhança de a, isto é, para x ∈ (a − δ, a + δ)\{a}
com δ > 0. Por outro lado, nós dizemos que p(x) = o(q(x)) quando x → a, se
p(x)
limx→a q(x)
= 0. Isto implica que existe uma vizinhança de a sobre a qual q não se
anula.
A seguir apresentamos as demontrações de algumas estimativas do presente trabalho. A estimativa (3.4.1) e a expansão em série de taylor da função f em torno
de 1 fornecem
f (ϕ ) = f (1 + O()) = f (1) + f 0 (1)O() +
f 00 (1)
O(2 ) + O(3 ),
2
e daí usando a hípótese (2.2.12), isto é, que f (1) = f 0 (1) = 0, temos que
f (ϕ ) = o() sobre B (x, t).
e a estimativa (3.4.4) fica demonstrada. Analogamente, a estimativa (3.4.2) pode
ser obtida.
Usando (3.4.2), (3.4.6) e, em seguida, expandindo a quantidade Wbu em série de
taylor em torno do ponto (F , 1), nós obtemos que
Wbu = g(ϕ )W(F )
= (1 + O())W (F + O())
= (1 + O())(W (F ) + ∂F W (F )O() + O(2 ))
= W (F ) + O(),
válida sobre B (x, t). Tendo demonstrado (3.4.7)1 , um procedimento similar pode
ser usado para mostrar (3.4.7)2,3 .
34
Para mostrar (3.4.8)1 , nós utilizamos (3.4.4) e (3.4.3) e assim temos que
Wxs = −2 f(ϕ ) +
λ
|p |2
2
λ
= −2 o() + |O()|2
2
= O(1) + O(2 )
= O(1),
válida sobre B (x, t), e da mesma forma poderíamos demonstrar (3.4.8)2 . Nao é
difícil mostrar (3.4.9).
As estimativas em (3.5.8) seguem diretamente da aplicação da expansão interna
de ϕ às fórmulas (3.5.7). A estimativa (3.5.9)1 é uma consequência direta de (3.5.8).
A demonstração de (3.5.9)2 é dada por
sgn(ϕ́in
2
0 ) in
2
ϕ́1 + o(),
|p
|
=
1
+
2
in 2 |ϕ́0 |
|ϕ´in
0 |
e daí tirando a raiz de ambos os lados obtemos
sgn(ϕ́in
0 ) in
ϕ́1 + o(),
|p | = 1 + in
in
´
|ϕ́0 |
| ϕ0 |
e assim segue o resultado.
Para mostrar (3.5.9)3 fazemos uso da seguinte fórmula (veja Gurtin [67] página
30)
div(ζχ) = ζdiv(χ) + χ · ∇ζ,
onde ζ é um campo escalar e χ um campo vetorial. Recordando da estimativa
(3.5.8) para p , e aplicando a fórmula acima à
4ϕ = div(p ),
nós demonstramos sem qualquer dificuldade a estimativa (3.5.9)3 .
Para mostrar (3.5.11) observemos que
−1
(sgn(ϕ́in
|ϕ́in
p
0 ))m + O()
0 |
=
,
in −1
|ϕ́0 | |p |
1 + O()
35
e o resultado segue diretamente. A demonstração de (3.5.14) sobre L é dada por
−1
2
t · −1 f xs
= β|∂x ϕ | V
in
2 2
= −1 β|∂x ϕin
0 + ∂x ϕ1 + O( )| V
2
= −1 β|∂x ϕin
0 | V + O(1).
Fazendo uso das estimativas: (3.5.8) e (3.5.9) na expressão (3.2.11)2 para Cxs
, junto
com a relação (3.6.4), obtemos
λ
−1
2
Cxs
= f(ϕ )I + |p | I − λp ⊗ p
2
λ −1 in 2
−1 in 2
= −1 f(ϕin
0 )I + |ϕ́0 | I − λ |ϕ́0 | m ⊗ m + O(1)
2
=
−1
f(ϕin
0 )
!
λ
2
2
I − λ−1 |ϕ́in
+ |ϕ́in
0 | m ⊗ m + O(1)
0 |
2
2
−1 in 2
= −1 λ|ϕ́in
0 | I − λ |ϕ́0 | m ⊗ m + O(1)
2
= −1 λ|ϕ́in
0 | (I − m ⊗ m) + O(1)
2
= −1 λ|ϕ́in
0 | P + O(1),
+
sobre L+
∪ L .
36
Referências Bibliográficas
[1] GURTIN, M. E., PODIO-GUIDUGLI, P. “Configurational forces and the basic
laws for crack propagation”, J. Mech. Phys. Solids, v. 44, n. 6, pp. 927–
967, 1996.
[2] DUDA, F. P., SOUZA, A. C. “On a continuum theory of brittle materials with
microstructure”, Comp. Appl. Math., v. 23, n. 2-3, pp. 327–343, 2004.
[3] GRIFFITH, A. “The phenomena of rupture and flow in solids”, Phil. Trans.
Rey. Soc. London, v. A 221, n. 582-593, pp. 163–198, 1921.
[4] INGLIS, C. E. “Stresses in a plate due to the presence of cracks and sharp
corners.” Trans. Inst. Nav. Arch., 1913.
[5] IRWIN, G. R. Fracture mechanics. In: J. N. Goodier and N. J. Hoff, editors,
Estructural Mechanics. 1 ed. Elmsford, New York, Pargamon Press, 1960.
[6] OROWAN, E. “Energy criteria of fracture.” Weld. Res. Supp., 1955.
[7] IRWIN, G. R. “Analysis of stresses and strains near the end of a crack transversing a plate.” Trans. ASME J. Appl. Mech., v. 24, pp. 361–364, 1957.
[8] CHEREPANOV, G. P. “The propagation of cracks in a continuous medium.”
Journal of Applied Mathematics and Mechanics, v. 31, pp. 503–512, 1967.
[9] RICE, J. “A path independent integral and approximate analysis of strain concentration by notches and cracks”, J. Appl. Mech., v. 35, n. 2, pp. 379–386,
1968.
[10] ANDERSON, T. L. Fracture Mechanics: Fundamentals and Applications. 1 ed.
Boca Raton, CRC Press, 1994.
[11] FRANCFORT, G. A., MARIGO, J. J. “Revisiting brittle fractures as an energy
minimization problem”, J. Mech. Phys. Solids, v. 46, n. 8, pp. 1319–1342,
1998.
37
[12] FRANCFORT, G. A., MARIGO, J. J. “Griffith theory of brittle fracture revisited: merits and drawbacks.” Latin American J. Solids Structures, 2005.
[13] BOURDIN, B., FRANCFORT, G., MARIGO, J. J. “The variational approach
to fracture”, Journal of Elasticity, v. 91, n. 1-3, pp. 5–148, 2008.
[14] DALMASO, G., TOADER, R. “A model for the quasistatic growth of brittle fractures: existence and approximation results”, Arch. Ration. Mech.
Anal., v. 162, n. 2, pp. 101–135, 2002.
[15] BULIGA, M. “Energy Minimizing Brittle Crack Propagation.” v. 52, pp. 201–
238, 1999.
[16] CHAMBOLLE, A. “A density result in two-dimensional linearized elasticity,
and applications.” Arch. Ration. Mech. Anal., v. 167, pp. 211–233, 2003.
[17] FRANCFORT, G. A., LARSEN, C. J. “Existence and convergence for quasistatic evolution in brittle fracture.” Comm. Pure Appl. Math., v. 56,
n. 10, pp. 1465–1500, 2003.
[18] DALMASO, G., FRANCFORT, G. A., TOADER, R. “Quasistatic crack growth
in nonlinear elasticity.” Arch. Ration. Mech. Anal., v. 176, pp. 165–225,
2005.
[19] BOURDIN, B., FRANCFORT, G., MARIGO, J. J. “Numerical experiments in
revisited brittle fracture”, Journal of the Mechanics and Physics of Solids,
v. 48, n. 4, pp. 797–826, 2000.
[20] AMBROSIO, L., TORTORELLI, V. M.
“On the approximation of free-
discontinuity problems”, Boll. Un. Mat. Ital., v. B (7) 6, n. 1, pp. 105–123,
1992.
[21] DALMASO, G. An Introduction to Γ-convergence. 1 ed. Boston, Birkauser,
1993.
[22] BRAIDES, A. Γ-convergence for beginners. 1 ed. New York, Oxford University
Press, 2005.
[23] BRAIDES, A. Approximation of Free-Discontinuity Problems. 1 ed. Berlin,
Springer-Verlag, 1998.
[24] GIACOMINI, A. “Ambrosio-Tortorelli approximation of quasi-static evolution
of brittle fractures”, Calc. Var. Partial Differential Equations, v. 22, n. 2,
pp. 129–172, 2005.
38
[25] ADAMS, R. A. Sobolev Spaces. 1 ed. Boston, Academic Press, 1975.
[26] EVANS, L. C., GARIEPY, R. F. Measure Theory and Fine Properties of Functions. 1 ed. Boca Raton, CRC Press, 1992.
[27] AMBROSIO, L., FUSCO, N., PALLARA, D. Functions of Bounded Variation
and Free Discontinuity Problems. 1 ed. Oxford, Oxford University Press,
200.
[28] MODICA, L., MORTOLA, S. “Un esempio di Γ-convergence”, Boll. Un. Mat.
Ital., v. 98, n. B-14, pp. 285–299, 1977.
[29] MODICA, L. “The gradient theory of phase transitions and the minimal interface criterion”, Archive for Rational Mechanics and Analysis, v. 98, n. 2,
pp. 123–142, 1987.
[30] FEDERER, H. Geometric Measure Theory. 2 ed. New York, Springer-Verlag,
1968.
[31] PIERO, G. D., LANCIONI, G., MARCH, R. “A variational model for fracture mechanics: Numerical experiments”, Journal of the Mechanics and
Physics of Solids, v. 55, n. 6-7, pp. 2513Ű2537, 2007.
[32] FUSCO, N., LEONE, C., MARCH, R., et al. “A lower semi-continuity result
for polyconvex functionals in SBV.” In: Proceedings of the Royal Society
of Edinburg, Section A, Mathematics, v. 136, pp. 321–336, 2006.
[33] FOCARDI, M. “On the variational approximation of free-discontinuity problems in the vectorial case.” Math. Mod. Meth. Appl. Sci., v. 11, pp. 663–
684, 2001.
[34] KACHANOV, L. M. Introduction to Continuum Damage Mechanics. 1 ed.
Dordrecht, Holland, Maritinus Nijhoff Publishers, 1986.
[35] FRÉMOND, M., NEDJAR, B. “Damage, gradient of damage and principle
of virtual power.” International journal of solids and structures, v. 33,
pp. 1083–1103, 1996.
[36] BAZANT, Z. P., OH, B. “Crack band theory for fracture of concrete.” RILEM
Materials Struct., v. 16, pp. 155–177, 1983.
[37] DE BORST, R., NAUTA, P. “Non-orthogonal cracks in a smeared finite element
model.” Engng Computing, v. 2, pp. 35–46, 1985.
39
[38] MAZARS, J., PIJAUDIER-CABOT, G. “From damage to fracture mechanics
and conversely: a combined approach.” Int. J. Solids Structures, v. 33,
pp. 3327–3342, 1996.
[39] LEMAITRE, J., CHABOCHE, J. L. Mechanics of Solid Materials. 1 ed.
Cambridge, Cambridge University Press, 1990.
[40] LEMAITRE, J. “Local aproach to fracture”, Engineering Fracture Mechanics,
v. 25, n. 5, 6, pp. 523–537, 1986.
[41] PINEAU, A. “Development of the local aproach to fracture over the past 25
years: theory and applications”, Anales de la Mecánica de Fractura, v. 1,
2007.
[42] BAZANT, Z. P. “Instability, ductility and size effect in strain-softening concrete.” ASCE J. Engng Mech., v. 102, pp. 331–344, 1976.
[43] SIMO, J. C., OLIVER, J., ARMERO, F. “An analysis of strong discontinuities
induced by strain softening in rate independent inelastic solids.” Computational Mech., pp. 271–296, 1993.
[44] LEMAITRE, J., CHABOCHE, J. L. Fracture Mechanics of Concrete Structures, from Theory to Applications. 1 ed. London, Chapman and Hall,
1989.
[45] DE BORST, R., MUHLHAUS, H. B., PAMIN, J. “A gradient dependent continuum model for mode I fracture in concrete and rock.” Elsevier Publishers,
Oxford, pp. 251–259, 1992.
[46] CHEN, L. Q. “Phase-field models for microstructure evolution.” Ann. Rev.
Mater. Res., v. 32, pp. 113, 2002.
[47] BOETTINGER, W. J., WARREN, J. A., BECKERMANN, C., et al. “Phasefield simulation of solidification”, Ann. Rev. Mater. Res., v. 32, pp. 163–
194, 2002.
[48] GROSSMANN, B., ELDER, K. R., GRANT, M., et al. “Directional solidification in two and three dimensions”, Phys. Rev. Lett., v. 71, pp. 3323–3326,
1993.
[49] CAHN, J., HILLIARD, J. “Free energy of an nonuniform system. I. Interfacial
free energy”, J. Chem. Phys., v. 28, pp. 258, 1958.
40
[50] HUTCHINSON, J., TONEGAWA, Y. “Convergence of phase interfaces in the
van der Waals-Cahn-Hilliard theory.” Calc. Var. and Part. Diff. Equat.,
v. 10, n. 1, pp. 49–84, 2000.
[51] GRANASY, L., BORZSONYI, T., PUSZTAI, T. “Nucleation and bulk crystallization in binary phase field theory”, Phys. Rev. Lett., v. 88, pp. 206105,
2002.
[52] ARANSON, I. S., KALATSKY, V. A., VINOKUR, V. “Continuum field description of crack propagation.” Phys. Rev. Lett., v. 85, pp. 118–121, 2000.
[53] KARMA, A., KESSLER, D., LEVINE, H. “Phase-field models of mode III
dynamic fracture”, Phys. Rev. Lett., v. 87, n. 4, pp. 455011–455014, 2001.
[54] HAKIM, V., KARMA, A. “Laws of crack motion and phase-field models of
fracture”, Journal of the Mechanics and Physics of Solids, v. 57, n. 2,
pp. 342 – 368, 2009.
[55] GURTIN, M. E. “The Nature of Configurational forces”, Arch. Rational Mech.
Anal., v. 44, n. 131, pp. 67–100, 1995.
[56] ESHELBY, J. D. “The force on a elastic singularity.” Phill. Trans., v. A244,
pp. 87–112, 1951.
[57] CERMELLI, P., GURTIN, M. E. “The dynamics of solid-solid phase transitions
2. Incoherent interfaces”, Arch. Ration. Mech. Anal., v. 126, pp. 41–99,
1994.
[58] BURKE, J. E., TURNBULL, D. “Recrystallization and grain growth.” Progress
in Metal Physics, v. 3, pp. 220–292, 1952.
[59] GURTIN, M. E. Configurational Forces as Basic Concepts of Continuum
Physics. 1 ed. New York, Springer-Verlag, 1999.
[60] GURTIN, M. E., SHVARTSMAN, M. M. “Configuration forces and the dynamics of planar cracks in three-dimensional bodies”, J. Elasticity, v. 48,
n. 2, pp. 167–191, 1997.
[61] KALPAKIDES, V. K., DESCALU, C. “On the configurational force balance
in thermomechanics”, R. Soc. Lond. Proc. Ser. A Math. Phys. Eng. Sci.,
v. 458, n. 1, pp. 3023–3039, 2002.
[62] GARCKE, H.
On mathematical models for phase separation in elastically
stressed solids. Habilitation thesis, University Bonn, Regensburg, Germany, 2000.
41
[63] ONUKI, A. “Ginzburg-Landau approach to elastic effects in the phase separation of solids.” J. Phys. Soc. Jpn., v. 58, pp. 3065–3068, 1989.
[64] FRIED, E., GRACH, G. “An order-parameter based theory as a regularization of a sharp-interface theory for a solid-solid phase transitions”, Arch.
Ration. Mech. Anal., v. 138, n. 4, pp. 355–404, 1997.
[65] GURTIN, M. E., STRUTHERS, A. “Multiphase thermomechanics with interfacial structure 3. Evolving phase boundaries in the presence of bulk
deformation”, Arch. Ration. Mech. Anal., v. 112, n. 2, pp. 97–160, 1990.
[66] FRIED, E., GURTIN, M. E. “Continuum theory of thermally induced phase
transitions based on an order parameter”, Physica D: Nonlinear Phenomena, v. 68, n. 3-4, pp. 326 – 343, 1993.
[67] GURTIN, M. An Introduction to Continuum Mechanics. New York, Academic
Press, 1981.
42
Baixar