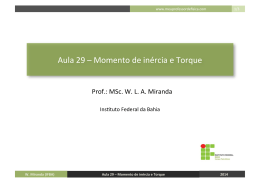
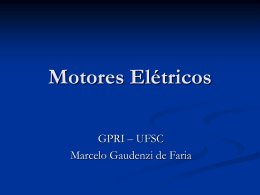
ILHA SOLTEIRA XII Congresso Nacional de Estudantes de Engenharia Mecânica - 22 a 26 de agosto de 2005 - Ilha Solteira - SP Paper CRE05-OA10 CONSIDERAÇÕES PRELIMINARES NA ESPECIFICAÇÃO DE MOTORES DE PASSO Jackson V. Lunkes, Leonardo K. Veiga e Alexandre D. da Silva UFSM, Universidade Federal de Santa Maria, Departamento de Engenharia Mecânica Faixa de Camobi Km 9- Campus Universitário, CEP 97105-900, Santa Maria, RS E-mail para correspondência: [email protected] Introdução O motor de passo é um dispositivo elétrico controlado por um circuito digital, que tem duas entradas principais de controle. Uma delas é um pino que recebe pulsos os quais geram movimentos angulares discretos no eixo do motor, denominados passos. A outra entrada define a direção desses movimentos. Portanto, para que um motor de passo funcione é necessário o uso de um circuito de controle externo para que a alimentação de suas bobinas seja feita de forma seqüencial e repetida, podendo ainda, inverter sua rotação ou variar sua velocidade. A característica desses motores de se movimentarem passo a passo com posicionamentos angulares precisos, os torna de recomendável utilização onde se requer ajuste fino de posicionamento. Apresentam como principal característica, a possibilidade de controle em malha aberta, ou seja, dispensa sensores para retroalimentação, simplificando o sistema de controle (da Silva A. D.,2000). Objetivos O objetivo é fazer um estudo dos motores de passo, enumerando os principais requisitos para seleção e especificação para sua aplicação em automação de processos de fabricação (Machado, A.,1987). Justificativa Com a crescente necessidade de melhoria de precisão em sistemas mecânicos e de redução de custos, torna-se necessário um maior conhecimento das características e aplicações dos motores de passo, para que se possa realizar a substituição dos servo-motores por estes sistemas que oferecem precisão equivalente, porém com custo muito menor (da Silva, A.D. et al,2000). Metodologia Através de pesquisas bibliográficas e consulta a fabricantes, levantou-se os aspectos relevantes para especificação e dimensionamento de sistemas mecânicos com motores de passo e acessórios. Para a utilização de um sistema com acionamento por motor de passo, deve-se levar em consideração algumas características próprias desse tipo de motor. O principal fator a considerar é a acentuada redução do torque fornecido pelo motor com o aumento da rotação, o que praticamente inviabiliza sua utilização em rotações muito elevadas. Normalmente os fabricantes, por questões de marketing, fornecem o torque de travamento (holding torque) para cada modelo de motor. Porém, este é o máximo valor de torque obtido por este motor em condições estáticas e, portanto, não serve de parâmetro para qualquer dimensionamento. Para a escolha correta do motor, deverá ser analisado o gráfico torque x rotação, que fornece o torque em condições dinâmicas. Em condições reais, deverá ser utilizado para o torque coeficiente de segurança (CS) no mínimo igual a dois (CS ≥ 2). A Fig.1 representa uma curva típica de torque x rotação e a área útil de utilização segura para um determinado motor de passo. Além do torque, a relação entre a inércia dos componentes mecânicos do sistema mais a carga e a inércia do rotor, é um fator fundamental para a escolha do motor de passo adequado a uma determinada aplicação. Conforme recomendações de fabricantes e usuários experientes, esta relação não deverá ser superior a cinco (5), sob pena de perda de passos, ou seja, patinamento. Resultados Tomando como exemplo o caso de uma mesa de coordenadas para oxicorte, onde o torque máximo requerido pelo conjunto mecânico é de 2,20 Kg.cm, a inércia é de 2,3 Kg.cm2, considerou-se que o motor deve trabalhar a 10 rps. No gráfico Torque x rps do conjunto motor – drive (fornecido pelo fabricante) o ponto referente às condições de utilização, deve estar dentro da área real de operação. Figura 1 – Área real de atuação - Smart Motion Robotics Inc Observando a Fig.2, verifica-se que o motor HT23-398 atende ao requisito. Além disso, deve-se verificar se a relação de inércias é menor que cinco (5). Consultando o catálogo do fabricante verifica-se que a inércia do rotor é de 0,58 Kg.cm2. Logo, obtém-se uma relação de inércias aceitável (3,96). Figura 2 – Curva de torque x rps especifica Conclusão Para a correta especificação de um motor de passo, não basta levar em consideração o requisito torque, mas também a relação das inércias entre as partes mecânicas móveis do sistema e o rotor. Fazendo-se isso, pode-se empregar estes em substituição aos servo-motores em inúmeros casos de maneira bem sucedida e muito mais econômica. Referências Bibliográficas da Silva, A.D., Richetti, A., “Conversão de Entidades Geométricas de CAD em Códigos de Acionamento de Motores de Passo para Programação de Mesas de Coordenadas”, Congresso Nacional em Engenharia Mecânica , Natal, RN, 2000. da Silva, A.D., Chagas, A.C., “Implementação de Funções Computacionais na Programação de Equipamentos de Comando Numérico”, Simpósio Mineiro de Mecânica Computacional SIMMEC, Uberlândia, MG, 2000. Machado, A., “Comando Numérico aplicado a Máquina ferramenta”, Ícone, SP, 1987. SMART MOTION ROBOTICS INC., “The Smart Motion Cheat Sheet.”, http://www.asatlantic.com/cheat_sheet_preview.htm.
Baixar