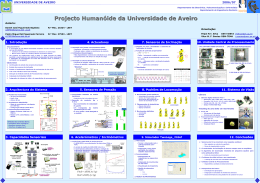
UNIVERSIDADE DE AVEIRO 2005/06 Departamento de Electrónica, Telecomunicações e Informática Departamento de Engenharia Mecânica Desenvolvimento de Algoritmos de Controlo para Locomoção de um Robot Humanóide Autoria: Orientação: Milton Ruas da Silva, N.º Mec. 21824 - LEET Filipe M.T. Silva DETI-IEETA ([email protected]) Vítor M.F. Santos DEM-TEMA ([email protected]) [email protected] 1. Enquadramento e Objectivos Neste sentido, um grupo do Departamento de Engenharia Mecânica iniciou em 2003 a construção de uma plataforma humanóide de baixo custo no sentido de realizar investigação em áreas tão diversas como o controlo, a percepção e a navegação. Neste trabalho pretende-se desenvolver e implementar um conjunto de estratégias e algoritmos de controlo para o robot humanóide. O projecto pode ser decomposto nas seguintes fases: Com as crescentes exigências de binário, a resposta do servo deteriora-se… Solução: Compensação por SW! Posição desejada PID incremental Sinal de controlo Servomotor Posição do servo Movimento de Flexão Carga de 2.1 Kg A concepção de um Robot Humanóide constitui um dos maiores desafios na área da robótica: construir um ser artificial semelhante ao homem é um sonho inato do nosso engenho. Marcas como a Sony ou a Honda já deram os primeiros passos. 4. Controlo da Locomoção Movimento Lateral Melhoramento dos algoritmos de comunicação entre os diversos nós; Desenvolvimento de estratégias de controlo a adoptar na actuação das juntas, relativas à locomoção; Implementação de um controlador de equilíbrio. 2. Arquitectura do Robot Plataforma Humanóide 22 graus de liberdade Peso: 6 Kg Altura: 60 cm Arquitectura distribuída 5. Controlo de Equilíbrio Main Control Equilíbrio realizado através de sensores de força nos pés RS232 Master CAN BUS Slaves 3 1 2 2 Configuração Master/Multi-Slave 3 2 2 1 1 1 Comunicações assíncronas Entre master e slaves: CAN bus a 1 Mbit/s Entre master e PC (série RS232 a 115Kbaud) 3 3 2 2 1 1 3 3 2 2 1 1 Lei de controlo: Δq=K·JT·CoP Δq: Velocidade das juntas J: Jacobiano do centro de pressão (CoP) Unidades de Controlo (Master/Slave) 3. Actuação nas Juntas 6. Conclusões Cada Slave controla até 3 actuadores Actuação nas juntas: Servomotores HITEC Controlador de posição incluído, mas não oferece controlo de velocidade Disponibiliza sinal de saída com informação da posição e da corrente consumida Actuação e Leitura Sensorial PWM de controlo de posição (entrada) Impulso de “corrente” (variável) Posição do motor (variável) 20 ms Pernas & juntas de elevado binário Os servomotores revelam-se adequados para o Controlo da Locomoção: Controlo de equilíbrio usando sensores de força: Sinal de Saída Braços & juntas de baixo binário Sistemas de controlo mais simples e fiáveis; Debugging simplificado. Controlo de velocidade introduzido pela aplicação de trajectórias; Controlo de posição optimizado com a adição de um compensador PID; Infelizmente a compensação não contempla as variações de Inércia. Amplitude fixa Aplicação A arquitectura distribuída apresenta várias vantagens: Modelo Correias de transmissão para redução de binário Massa Binário (g) (N.m) HS85BB ~20 0.35 HS805BB 119 2.26 Resposta bastante reactiva a inclinações do plano, mas ainda limitada pela mecânica que suporta os extensómetros: mais evoluções, no domínio dos materiais utilizados, em vista a curto prazo. Perspectivas futuras: Utilização da corrente medida para adaptação da compensação PID, de modo a contemplar as variações de Inércia; Integração do controlo da locomoção com o controlo de equilíbrio; Substituição do PC por uma embedded motherboard nano-ITX; …
Baixar