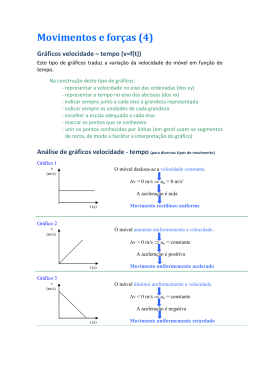
Desenho e Projeto de Tubulação Industrial Nível II Módulo II Aula 03 1. Introdução A Mecânica de divide em Cinética e Estática. A Cinética estuda os movimentos e por sua vez se divide em Cinemática e Dinâmica. A Cinemática estuda o movimento dos corpos independentemente das forças que provocam esse movimento, ou seja, estuda o movimento em si e a Dinâmica estuda o movimento dos corpos causado pela forças que atuam sobre ele. A Estática estuda o equilíbrio dos corpos e determina as forças para que o equilíbrio seja mantido. 2. Cinética básica- Cinemática A Cinemática é a ciência que descreve o movimento dos objetos sem levar em conta as forças que atuam sobre ele e ela usa números, gráficos e equações. O alvo do estudo da cinemática é de desenvolver modelos que sirvam para explicar o movimento dos objetos do mundo real. Ela é usada, por exemplo, no estudo do movimento dos robôs. 2.1 Escalares e vetores O movimento dos corpos pode ser observado pela distância, deslocamento, velocidade e aceleração que os mesmos podem desenvolver. Estas são quantidades matemáticas que são usadas para descrever o movimento dos objetos e podem ser divididas em duas categorias: escalares e vetoriais. Estas duas categorias podem ser definidas assim: 1. Escalares são as quantidades que podem ser descritas por somente uma grandeza. 2. Vetores são quantidades que podem ser descritas por sua grandeza, sentido e direção. Vamos ver a diferença entre distância e deslocamento que podem parecer a mesma coisa: 1. Distância é uma grandeza escalar que se refere ao caminho percorrido pelo movimento do corpo não importa a direção ou sentido desse movimento. 2. Deslocamento é um a quantidade vetorial que se refere a que distância o corpo está após o movimento, ou seja, qual é sua posição. Vamos fazer um exemplo para compreender a diferença entre essas palavras. Um objeto se movimentou 5 metros para a direita, 3 metros para baixo, 5 metros para a esquerda e 3 metros para cima como vemos na Figura 2.1. Figura 2.1 O ponto se movimentou por uma distância de 16 metros, porém seu deslocamento foi zero, pois ele retornou ao ponto de partida. Agora vamos ver outras duas grandezas: velocidade escalar e velocidade vetorial. Velocidade escalar é a quantidade que se refere a rapidez do movimento. Um objeto que se move rapidamente tem uma velocidade escalar mais alta que um que se movimenta em velocidade escalar mais baixa. Velocidade vetorial se refere à taxa de mudança de posição do objeto. Imagine que um objeto de move rapidamente para frente e para trás a mesma distância voltando sempre para o mesmo lugar. A velocidade deste objeto apesar do movimento frenético rápido tem uma velocidade vetorial zero, pois volta sempre para a mesma posição. Como a velocidade vetorial é definida como uma taxa ou razão de mudança de posição este movimento resulta em uma velocidade vetorial nula. Como a velocidade vetorial é uma grandeza vetorial ela tem uma direção e não é bastante dizer que o objeto tem uma velocidade de 50 m/min, mas sua direção e sentido devem também ser definidos e temos que dizer, por exemplo, 50 m/min 100 graus sul. Assim vemos uma diferença essencial entre a velocidade escalar (que não precisa indicar sua direção) e a velocidade vetorial onde a direção e o sentido devem ser definidos. 2.2 Movimento uniforme e variável Podemos ter dois casos de movimento: movimento uniforme e movimento variado. No movimento uniforme a velocidade do corpo não se modifica e toma o nome de velocidade constante ou uniforme. Neste caso o objeto percorre a mesma distância em cada intervalo de tempo igual, por exemplo, 5 metros por segundo em qualquer momento que a velocidade for medida. Outro conceito é o de velocidade instantânea. No caso de um movimento variado temos a velocidade média como vimos acima e a velocidade instantânea. Esta velocidade é a velocidade em um dado tempo. Quando um objeto se move como um carro que inicia sua marcha, por exemplo, sua velocidade pode se modificar e temos um movimento variado. Por isso definimos uma grandeza: a velocidade média de um corpo. Neste caso o tempo deve ser também medido e a velocidade média é dada pela divisão da distância medida pelo tempo gasto no movimento. Chamando a velocidade média por Vm, a distância percorrida por L e o tempo gasto pelo movimento por T podemos definir a seguinte equação: Outro conceito é o de velocidade instantânea. No caso de um movimento variado temos a velocidade média como vimos acima e a velocidade instantânea. Esta velocidade é a velocidade em um dado tempo. No exemplo que demos acima na Figura 2.1, o objeto se moveu por 26 metros. Se este movimento de deu em 6,5 segundos a velocidade média foi de: Mas sua velocidade instantânea poderia ter sido em dado momento de 6 metros por segundo e em outro momento de 2 metros por segundo. Vamos estudar agora os movimentos variados. Um corpo está em movimento variado quando os espaços percorridos na unidade de tempo não são iguais. No caso que os espaços percorridos em cada unidade de tempo forem cada vez maiores o movimento é chamado de movimento acelerado e no caso inverso com espaços menores percorridos o movimento é chamado de retardado. Um carro ao partir tem um movimento acelerado e ao parar tem um movimento retardado. Um objeto lançado para cima tem um movimento retardado pela ação da gravidade sobre o corpo e seu movimento é acelerado na queda pela ação da mesma força. Se a aceleração em cada unidade de tempo for a mesma, temos um movimento uniformemente acelerado. Se representarmos por ac a aceleração em cada segundo e por v a velocidade do corpo cuja velocidade inicial é c, a velocidade do corpo no fim do primeiro segundo será: c+ac. Ao fim do segundo seguinte sua velocidade será c+2ac e ao fim de t segundos sua velocidade será: Vamos traçar agora um diagrama tempo-distância como vemos na Figura 2.2, com as velocidades nas ordenadas e os tempos nas abscissas e obtemos a representação geométrica do movimento uniformemente variado. Nesse diagrama você pode desenhar os tempos como 1s=1cm, por exemplo, e a velocidade como 1m=1cm. Note que você pode escolher a escala que desejar. Figura 2.2 Para calcular o caminho percorrido pelo objeto neste caso, devemos lembrar que esse caminho é dado no diagrama pela área do trapézio ABCD que é dada pela equação: Ou: Este é o diagrama de um movimento uniformemente acelerado. Se ele fosse uniformemente retardado o sentido da parcela act deveria ser mudado, pois a velocidade estaria diminuindo e teríamos a fórmula seguinte: Neste caso a representação seria como a da Figura 2.3. Figura 2.3 No caso do movimento uniformemente retardado a velocidade inicial é mais alta e vai diminuindo até alcançar a velocidade final c. Neste caso o espaço percorrido é dado também pela área do trapézio, mas subtraindo o espaço percorrido e temos então: Supondo que o corpo parta do repouso o valor de c será 0 e temos então: Exercícios 1. Qual é o espaço percorrido pelo som em 30 segundos se c= 333 m? 2. Qual é a velocidade de um carro que em 6 segundos percorre 300 metros? 3. Se um trem percorre 90 km em 45 minutos qual é sua velocidade em metros por segundo? 2.3 Queda livre dos corpos e lançamento vertical Os corpos em queda livre adquirem uma aceleração de 9,81 m/s e esta grandeza é representada por g. O trajeto percorrido pelo corpo ao cair que chamaremos por h e a velocidade de queda v, pode ser determinado pelas fórmulas: Dessas equações podemos deduzir: Que substituindo na equação de h resulta: e Finalmente podemos obter para g: Esta última fórmula nos permite determinar g experimentalmente. Para esta determinação se determina a altura h exata da queda do corpo e o tempo t que dura a queda. Para a determinação do tempo se pode usar um cronômetro que indique frações de segundo e que começa a contar o tempo no momento do início da queda parando no momento exato da parada do corpo. As fórmulas que vimos acima são aplicáveis com precisão em um ambiente no vácuo absoluto, no qual todos os corpos caem com a mesma velocidade. Isto pode ser demonstrado por meio do tubo de Newton. Devemos notar que dissemos no vácuo, pois em um ambiente normal com ar este afeta a velocidade do corpo devido ao atrito do ar. No caso do lançamento vertical para cima dos corpos, a velocidade inicial vi adquire um valor uniformemente retardado. Esta aceleração negativa é igual a –g ou -9,81 m/s. As fórmulas para o cálculo da velocidade e da altura que o corpo pode atingir são: Você vê que estas fórmulas são semelhantes às que foram apresentadas para a queda livre com a diferença que agora o corpo tem uma velocidade inicial ascensional positiva. Dessas fórmulas deduzimos que a velocidade do corpo vai diminuindo até que se reduz a 0, quando o corpo atinge seu ponto superior máximo e inicia a queda. O ponto máximo que o corpo pode atingir é dado pela fórmula: Para valores maiores de t a velocidade v ficará negativa e o corpo começa a cair e volta para o ponto inicial do movimento de ascensão. O tempo total é o dobro do tempo gasto para atingir o ponto máximo. Em todo este raciocínio nos abstivemos do efeito do ar no movimento dos corpos. Este omissão pode ser válida para pequenos movimentos que são as que encontramos nas aplicações usuais. Exercícios 4. Um objeto é lançado para cima com uma velocidade de 20 m/s. Qual é a altura que ele atingirá para iniciar sua queda? 5. Um objeto em queda livre cai por 4 segundos até atingir o chão. A que altura ele estava? 6. Um objeto é lançado para cima com uma velocidade de 30 m/s. Quanto tempo ele leva para voltar para o ponto inicial? 3. Cinética básica- Dinâmica O estudo feito do movimento dos corpos até aqui tratou do movimento puro sem levar em conta as forças que podem atuar sobre eles. Como dissemos no início do capítulo 2 este é o estudo da Cinemática que se abstém das forças. Agora vamos estudar a parte da Física chamada de Cinética ou Dinâmica que estuda as forças que atuam sobre o corpo provocando seu movimento. A Dinâmica explica o movimento por meio do uso de vetores que são retas orientadas com direção e sentido. Os vetores são identificados com setas e podem ser calculados algebricamente usando o teorema de Pitágoras decompondo as forças em dois eixos X e Y. As leis de Newton são básicas para o estudo da Mecânica. Estas leis descrevem as relações entre as forças que atuam sobre um corpo e o movimento que elas provocam nesse corpo. Essas leis são: 1. Lei da Inércia: Na ausência de uma força um corpo não pode alterar seu estado de movimento ou de repouso. É a 1ª. Lei de Newton. 2. Um corpo que sofre a ação de uma força pode sofrer uma aceleração que se relaciona com a massa desse corpo. É a 2ª. Lei de Newton. 3. Quando um corpo exerce uma ação sobre outro corpo este exerce sobre aquele uma força igual e contrária. É a lei da ação e reação. Esta é a 3ª. Lei de Newton. 3.1 Lei da Inércia Podemos citar esta lei desta forma: Um corpo não pode alterar seu estado de repouso ou de movimento sem a atuação de uma força exterior. Supondo que um corpo está em repouso: ele continuará assim até que uma força atue sobre ele, se ele estiver em movimento uniforme em linha reta ele continuará assim que sua velocidade ou direção sejam modificadas pela atuação de uma força externa. O primeiro princípio pode ser facilmente exemplificado. Se estivermos sentados um uma poltrona para nos levantarmos dela necessitamos fazer um esforço (tanto maior quanto mais pesados formos). Também se estivermos correndo, para pararmos temos que fazer um esforço no sentido contrário da corrida. Este efeito da inércia é usado na indústria nas máquinas rotativas que desejamos controlar sua velocidade e, para isto, são instalados volantes pesados cujo peso é usado para o controle. 3.2 Conceito de força O que falamos repetidamente até agora é causado por forças que se opõem ao axioma de que a inércia pode se manifestar de modo direto. Entendemos por força toda a causa capaz de produzir ou modificar um movimento quanto à sua direção e velocidade. Quando falamos do movimento de um corpo lançado para cima vimos que ele diminui constantemente e quando ele chega a seu ponto máximo sua velocidade é zero e começa a cair aumentando sua velocidade até cair no solo. A força que atua sobre esse corpo tem o nome de força da gravidade ou peso do corpo. Mas se o corpo estiver em movimento em um plano horizontal a gravidade não atua, pois está neutralizada pela reação da superfície de apoio do corpo. Entretanto devido a esta reação da superfície de apoio contra o corpo, existe uma resistência ao movimento do corpo que toma o nome de atrito que causa uma diminuição da velocidade do corpo e temos um movimento uniformemente retardado. Mas o atrito pode ser diminuído com lubrificação das superfícies e não pode ser anulado completamente. Mesmo que isto fosse possível temos ainda outra resistência ao movimento que é oferecida pelo ar que atua no sentido contrário ao do movimento. Do que vimos não será possível a comprovação direta do princípio da inércia devido à impossibilidade de retirarmos as influências de forças externas aos corpos que atuam sobre eles. 3.3 Elementos que determinam uma força A força é definida por três elementos: 1. Ponto de aplicação que é o lugar de um corpo que recebe a ação da força. 2. Direção da força que a linha reta pela qual a força tende e mover o ponto de aplicação. 3. Grandeza da força que é a quantidade de unidades de força aplicada. Como vimos o efeito visível que uma força qualquer se manifesta é por meio de um movimento ou uma modificação de movimento de um corpo. Mas pode acontecer que o ponto de aplicação da força esteja retido e não possa de movimentar, neste caso o efeito é a manifestação de uma pressão sobre o corpo de forma que esta manifestação possa ser medida. Por peso de um corpo se entende a pressão que ele exerce sobre sua base de sustentação, todas as forças podem ser medidas em unidades de peso convenientes. A fim de que as medidas de peso e de volume que o corpo ocupa possam ser adequadamente determinadas foi adotado no sistema métrico o quilograma cuja abreviação é kg cuja determinação já foi estudada acima. 3.4 Princípio da ação e reação No capítulo 3 vimos que o terceiro axioma citado foi o da ação e reação. Este axioma expressa que as forças nunca se apresentam de forma isolada, mas aos pares de forma que duas forças agem simultaneamente e são sempre iguais, sobre a mesma reta e de sentidos contrários. A pressão que um corpo exerce devido ao seu peso sobre uma superfície causa uma reação de sentido contrário de igual grandeza e direção como, por exemplo, um peso suspenso em um fio origina no fio uma tensão igual a seu peso e de sentido contrário. Ao levantarmos um peso este causa uma reação igual e contrária sobre nossos pés. 3.5 Massa Segundo temos estudado entendemos por força toda a causa de uma modificação de movimento de um corpo. Se sobre um corpo não age força alguma ele conserva seu estado, seja de movimento uniforme ou sem movimento. Mas se esse corpo puder se movimentar e sobre ele atuar uma força de intensidade constante, ele irá paulatinamente se mover com certa alteração da velocidade no tempo, ou seja, ele terá um movimento uniformemente acelerado. Se a intensidade da força for duplicada a aceleração do corpo será também duplicada e podemos dizer então que a aceleração de um corpo será proporcional á intensidade da força aplicada sobre ele. Podemos representar isto por meio da equação: Onde: F é a força que atua sobre o corpo, C é uma constante e ac é a aceleração obtida. Para determinar a constante C vamos fazer uma experiência simples como vemos na Figura 3.1. Figura 3.1 Temos um corpo que pode se mover na horizontal (que está temporariamente preso por meio de uma cunha), pela ação de uma força F que está acelerando constantemente pela ação da gravidade e a equação dada acima rege esta aplicação. Se agora deslocamos a cunha que está travando o carro, o peso cairá na vertical com a aceleração g da gravidade e a equação acima será modificada para: e podemos então tirar a constante C: Substituindo este valor na equação F= Cac temos: A razão é a massa do corpo e a representamos por M e podemos escrever: Finalmente obtemos a fórmula: Esta fórmula é de fundamental importância e podemos escrever assim: Força = massa vezes aceleração A Figura 3.1 representa uma máquina de Atwood simplificada que vemos na figura 3.2 abaixo. Esta máquina é usada para comprovar experimentalmente as leis que acabamos de estudar. Figura 3.2 Exercícios 7. Um carro que pesa 3000 kg é empurrado por uma pessoa que faz 10 kg de pressão. Qual é a aceleração que ele conseguirá? 8. Um caminhão pesa 10000 kg e é empurrado por 3 pessoas com uma força total de 50 kg. Existe uma força de atrito de 1/500 do peso do caminhão. Qual é a aceleração que o caminhão terá? 3.6 Trabalho mecânico Como vimos toda força que deve imprimir certo movimento em um corpo tem que vencer certas resistências passivas e ativas e dizemos neste caso que a força efetua um trabalho. A grandeza desse trabalho depende da intensidade da força e do caminho percorrido. Por exemplo, ao levantarmos um peso deve ser exercida uma força de grandeza igual ao peso (de sentido contrário) e esta força realiza um trabalho tanto maior quanto for o peso que estamos levantando. Como unidade do trabalho mecânico é usado o quilogrâmetro que é a tração ou pressão de 1 kg que atua ao longo de um trajeto de 1 metro e sua abreviação é kgm. A fórmula para determinar o trabalho é muito fácil de se deduzir. Se elevarmos um peso de 1 kg a 1 metro de altura efetuamos um trabalho de 1 kgm, se o peso for de 2 kg elevado a mesma altura efetuaremos um trabalho de 2 kgm e se elevarmos um peso de P quilos a 1 metro de altura efetuamos um trabalho de P kgm. Vemos que o trabalho é o produto de um peso ou força pela distância percorrida e se chamarmos o peso ou força de P como acima, o trajeto percorrido de c e o trabalho por A temos: Trabalho=força vezes trajeto No sistema absoluto de medidas a unidade de trabalho é o erg, a força ou pressão é o dina e o caminho é dado em centímetros, então: Exercícios 9. Qual é o trabalho executado por um trabalhador que pesa 75 kg e sobe uma escada com 30 metros de altura? 10. Um homem empurra um carro que pesa 2500 kg a uma distância de 20 metros. Qual foi o trabalho que ele realizou? 3.7 Potência Estudamos o trabalho mecânico até agora sem ter em conta o tempo gasto para executá-lo. Um mesmo gasto de trabalho pode ser feito rápida ou lentamente e para poder comparar o trabalho a ser feito devemos levar em consideração o tempo gasto na sua execução. Este trabalho toma então o nome de potência mecânica. A unidade de potência mecânica usual é o quilogrâmetro por segundo também conhecido por cavalo-vapor. Então: 1 cavalo-vapor = 75 kgm/segundo Chamando P o peso ou força em kg, c o trajeto em metros, t o tempo e a potência por ξ, podemos escrever a seguinte equação: Como o trajeto dividido pelo tempo é a velocidade ou: escrever: então podemos 3.8 Energia cinética Todos os corpos quando em movimento têm certa capacidade para vencer resistências e efetuar trabalho como vimos. Esta capacidade de efetuar trabalho toma o nome de energia de movimento ou energia cinética. O trabalho que pode ser realizado pelo corpo que está sob a ação de uma força e adquire certa velocidade deve ser igual ao efetuado pela força para produzir essa velocidade. Vamos desenvolver a fórmula para calcular a energia cinética. Se o corpo partir do repouso o valor da velocidade inicial será 0 e temos então a velocidade: O trajeto percorrido será: Vamos eliminar o tempo entre essas duas equações. Para isso tiramos da primeira equação o valor de t: E substituímos esse valor na segunda equação: Dessa equação tiramos: Se multiplicarmos ambos os lados dessa equação pela força F temos: A expressão: representa a energia cinética ou quantidade de energia de movimento do corpo. Podemos definir esta energia como: A energia cinética é igual ao trabalho que um corpo pode efetuar. Para compreender melhor vamos fazer um exercício. Suponhamos que um caminhão tenha uma carga completa de 30000 kg e que a força de tração do caminhão seja de 1500 kg. Para este cálculo vamos desprezar o efeito do atrito. O caminhão ganhará uma aceleração dada pela fórmula: , ou força é igual à massa pela aceleração de onde tiramos: Exercícios 11. Trabalho mecânico é: a. Trabalho produzido por uma máquina b. Trabalho produzido por uma força c. Nenhuma das anteriores 12. Potência é: a. O trabalho realizado por uma máquina durante um dia b. O trabalho realizado por uma máquina por hora c. O trabalho mecânico realizado por segundo 13. A energia cinética é: a. A força de um movimento qualquer b. A energia de movimento c. A energia para vencer as resistências 4. Estática básica Estática é a parte da Mecânica que estuda as leis do equilíbrio dos corpos sólidos. Este estudo pode ser feito analítica ou graficamente. Acabamos de estudar o efeito das forças sobre um corpo provocando diversos tipos de movimento no mesmo. No caso da Estática o corpo em estudo não pode ser deslocado, ou seja, está fixo de alguma maneira e as forças que atuam sobre esse corpo provocam reações nos pontos fixos de apoio do corpo. Por meio deste estudo determinam-se as forças nos elementos do corpo e nos seus apoios permitindo assim seu dimensionamento. Por exemplo, em um telhado temos diversos elementos que suportam a cobertura com telhas, por exemplo, e antes de construir o telhado devem ser determinadas as forças nas tesouras do telhado e assim determinar as dimensões dos elementos da tesoura. Vamos iniciar nosso estudo com o paralelogramo das forças. 4.1 Paralelogramo das forças Se sobre um ponto Q de um corpo, chamado de ponto de apoio, atuam duas forças AB=F1 e AC=F2 com certos ângulos e estas forças que agem sobre ele podem ser mostradas por meio de um paralelogramo chamado de paralelogramo das forças, Figura 4.1. Figura 4.1 A linha AD denominada R representa a resultante das forças F1 e F2. A resultante é estabelecida fazendo-se CD paralela e igual à F1 e BD paralela e igual à F2 formando o paralelogramo ABDC. A resultante R tem o mesmo efeito das duas forças. Este é o método gráfico de determinação do paralelogramo das forças. Para usar o método analítico devemos conhecer trigonometria, pois estamos tratando com figuras geométricas. Para a demonstração prática do princípio do paralelogramo podemos construir um aparelho como o da Figura 4.2. Figura 4.2 Esse aparelho consiste de duas polias e 3 pesos que são equilibrados e braços móveis que permitem um ajuste automático da resultante na linha vertical para demonstrar o equilíbrio do sistema. 5. Centros de gravidade Como já estudamos, os corpos físicos são compostos de muitas partículas minúsculas chamadas de moléculas e sobre cada uma delas atua a força da gravidade verticalmente para baixo. Assim atuam tantas forças paralelas quantas são as moléculas do corpo e podemos reduzir todas elas em uma única resultante que é seu peso e que atua em seu centro de gravidade. Assim o centro de gravidade de um corpo é o ponto pelo qual podemos suspender esse corpo e ele estará sempre em equilíbrio. Na Figura 5.1 temos um corpo em repouso suspenso por um fio. Figura 5.1 O corpo está suspenso pela linha AA’ e se o suspendermos pela linha BB’ o ponto de encontro dessas linhas será o ponto C. Este ponto de encontro é o centro de gravidade desse corpo. Podemos também dizer que todo o eixo de simetria de uma figura é seu eixo de gravidade. Desse exemplo notamos uma forma experimental para determinar os eixos de gravidade o centro de gravidade de um corpo que é o ponto de encontro dos eixos. 6. Classes de equilíbrio dos corpos sólidos Acabamos de ver que ao suspender (ou apoiar) um corpo ele estará em equilíbrio somente quando ele está apoiado por uma reta que passa em seu centro de gravidade. Se o corpo está apoiado segundo uma linha reta ou ele puder girar sobre um eixo, é necessário que esta reta corte a linha vertical que passa pelo centro de gravidade do corpo para que ele esteja em equilíbrio. Temos três casos de equilíbrio que vamos estudar e que vemos na Figura 6.1 abaixo. Na Figura 6.1a temos um corpo onde o centro de gravidade está acima do ponto de apoio e na mesma vertical. Se ele for empurrado pelo mais leve impulso no sentido da flecha o equilíbrio será rompido e o corpo cairá. Este é chamado de equilíbrio instável. Na Figura 6.1b o centro de gravidade do corpo está abaixo do ponto de apoio ou de suspensão. O corpo mesmo que empurrado no sentido da flecha não vai cair ou voltará para o seu estado de equilíbrio. Temos um caso de equilíbrio estável. Na Figura 6.1c o ponto ou linha de apoio coincide com o centro de gravidade do corpo e em qualquer posição que ele seja colocado ele permanecerá em equilíbrio. Temos um caso de equilíbrio indiferente. Se uma esfera estiver apoiada sobre um plano como na Figura 6.1d temos um caso onde o centro de gravidade permanece no mesmo ponto e também se configura um caso de equilíbrio estável. 6.1. Estabilidade Um corpo apoiado sobre uma superfície pode permanecer em equilíbrio se a vertical que passa pelo centro de gravidade do corpo cair dentro de sua superfície de sustentação como vemos na Figura 6.2. Figura 6.2 Vemos nessa figura um corpo prismático C1 cujo centro de gravidade está situado dentro de sua base e dessa forma não tomba, mas se o centro de gravidade. 7. Máquinas simples Inicialmente vamos ver algumas definições. Os processos físicos e químicos fundamentais que estão envolvidos ou são responsáveis por uma ação ou reação ou outro fenômeno natural são chamados de mecanismos. O termo mecanismo é então aplicado a uma combinação de corpos geométricos que constituem a máquina ou parte dela. Um conjunto de peças que transmitem forças, movimentos e energia de uma forma pré-determinada é chamado de máquina. Uma máquina é composta de corpos rígidos e resistentes, formados e unidos e que se movem com movimentos relativos e transmitem força de uma fonte de energia para vencer os atritos e forças envolvidas. Uma máquina tem duas funções básicas: transmitir um movimento e uma força. Máquinas simples ou elementares são quaisquer de vários mecanismos que têm elementos que compõem as máquinas em geral. As máquinas incluídas na categoria de máquinas simples são a alavanca, a polia, o plano inclinado, a cunha e o parafuso. Apesar de um corpo rígido não existir na realidade, muitos dos componentes das máquinas são tomados como rígidos, pois suas deformações são pequenas em relação com seus movimentos relativos. 7.1. Alavanca Alavanca é um corpo rígido e móvel ao redor de um ponto fixo chamado de fulcro e sobre a qual agem pelo menos duas forças que tendem a girar a alavanca em sentidos inversos. Vemos na Figura 7.1 de forma esquemática uma alavanca AB sobre a qual atuam duas forças F1 e F2 sendo seu fulcro o ponto C. Figura 7.1 As alavancas são usadas para multiplicar uma força aplicada a um dos lados da alavanca e este efeito toma o nome de vantagem mecânica. Chama-se força potente a força aplicada Fp, e força resistente Fr a força que se deseja mover com a força potente aplicada. Toma o nome de braço potente Lp o lado onde se aplica a força potente e braço resistente Lr o lado onde está a força resistente. Elas são classificadas em: 1. Interfixas ou de primeira classe quando o ponto fixo fica entre a força resistente Fr e a força potente Fp. 2. Interresistente ou de segunda classe quando a força resistente Fr está entre a força potente Fp e o ponto fixo. 3. Interpotente ou de terceira classe quando a força potente Fp está entre a força resistente Fp e o pontofixo. Vemos estes três casos na Figura 7.2. Figura 7.1 A equação fundamental para resolver as alavancas é: Exercício Descreva com suas palavras os três tipos de alavancas 7.2. Plano inclinado A Figura 7.2 mostra um plano inclinado sendo AB sua base, BC sua altura e AC o plano inclinado propriamente dito. Figura 7.2 Com o uso dos planos inclinados uma dada resistência pode ser vencida com um esforço menor do que se ele não fosse usado. Suponhamos que desejamos elevar uma carga de 1000 kg a uma distância vertical de 1 m ou 100 cm. Caso quiséssemos elevar esse peso verticalmente precisaríamos usar uma força de 1000 kg. A fórmula para o cálculo dos planos inclinados é: Nessa fórmula F é a força a ser exercida, P o peso a ser elevado, H a altura a ser elevado o corpo e L o comprimento do plano inclinado. Então se tivermos um peso de 1000 kg como acima que queremos elevar a 1 m e o comprimento do plano inclinado é de 5 m, o esforça a ser despendido será de: Agora vamos estudar o parafuso. Todos nós conhecemos uma ferramenta usada para levantar carros, chamada de macaco. Vemos essa ferramenta na Figura 7.3. Ela se compõe de um parafuso e uma alavanca que duas máquinas simples. Figura 7.3 Esta ferramenta é uma aplicação prática do plano inclinado. Uma força F aplicada na alavanca a uma distância D pode levantar um peso P. A força F necessária é muito menor do que o peso a ser levantado e vamos ver como calcular essa força. Para isso vamos desprezar o atrito em nosso raciocínio. A força F multiplicada pela distância D é igual ao peso levantado multiplicado pela distância que ele foi levantado nesse tempo. Ora, como temos um parafuso cujo passo da rosca é de t a altura levantada em cada rotação do parafuso é de t e a circunferência descrita pela força aplicada é de 2πD e temos então: E tiramos então: Exemplo de aplicação. Suponhamos que desejamos trocar o pneu de nosso carro que pesa P=1500 kg e temos um macaco com um parafuso de 25 mm de diâmetro e passo t de 5 mm e a distância que a força é aplicada é de D=250 mm temos então: 7.3. Cunha Vemos na Figura 7.4 a representação de uma cunha sendo utilizada para abrir uma tora de madeira. Figura 7.4 Ao aplicarmos uma força F na cabeça da cunha ela exerce uma pressão que se desloca no mesmo sentido e direção e que pode ser decomposta em duas forças laterais como mostra a figura. A força F está deslocada para o ponto M e se decompõe em duas forças iguais, pois sua inclinação é igual dos dois lados: MN e MO que são perpendiculares aos lados da cunha e que chamaremos de Q. Então podemos ver que temos dois triângulos semelhantes sendo MP igual à força F aplicada e vamos então deduzir as relações entre a força F e as forças laterais Q. Ou Note que a força F está na mesma relação que o comprimento da cabeça da cunha e de seus lados. 7.4. Polias Até agora vimos as seguintes máquinas simples: a alavanca, o plano inclinado, a cunha e o parafuso. Vamos ver a última que é a polia. Podemos dividir as polias em móveis e fixas. As polias fixas servem para modificar o sentido das forças fazendo com que estas tomem direções convenientes na conformação das polias. Na Figura 7.5 vemos diversas instalações das polias que são muito úteis na prática da engenharia. Figura 7.5 O peso de uma carga que fica presa à forquilha da polia está suspenso por uma corda que tem dois ramais que passam pelo canal da polia. Assim a tensão em cada lado da polia é igual à carga Q dividida por 2 ou Q/2. Podemos então, chamando F a força exercida e Q a carga, escrever a equação: Quando temos diversas polias como nos arranjos que vemos na figura podemos usar a fórmula seguinte: Onde n é o número de polias móveis. No caso das talhas comuns um jogo de polias é fixo e outro é móvel como vemos na figura à esquerda. Neste caso a força exercida é dada pela fórmula: Exemplo de aplicação Suponhamos que queremos elevar uma carga de 300 kg e temos 6 polias móveis. Qual é o esforço que deve ser aplicado: 8. Lei da gravidade Em 1686 o físico Newton enunciou a lei que é conhecida como a lei de Newton e que diz: dois corpos de nosso sistema solar se atraem mutuamente com uma força que é diretamente proporcional às massas e inversamente ao quadrado da distância que os separa. Se representarmos a massa dos dois corpos por M1 e M2 e sua distância por d podemos escrever a equação abaixo, onde Q é uma constante que depende da unidade usada no cálculo: No caso de adotarmos o sistema absoluto de unidades e assumindo M1=M2 iguais a 1 g, a distância em cm, e a força em dinas temos: dinas Esta lei não se aplica somente aos corpos celestiais, mas a todos os corpos de qualquer massa e o peso dos corpos é uma consequência da atração que a Terra exerce sobre os corpos que estão sobre ela. Então se assumirmos que o peso de um corpo seja P, sua massa seja m e a massa da Terra seja M podemos escrever a seguinte equação: Nessa equação r é o raio da Terra. Suponhamos que nós suspendemos o corpo de massa m até uma altura h então a equação acima fica assim: Se dividirmos as duas igualdades acima teremos: E finalmente: Esta fórmula nos permite ver que o peso de um corpo diminui quando o elevamos acima do solo, mas sua massa permanece constante. 9. Pêndulo simples Se um corpo for suspenso de uma linha que consideraremos sem peso de comprimento c e deixarmos esse corpo livre ele ficará na posição de equilíbrio vertical. Se levarmos esse corpo para uma posição fora de sua posição de equilíbrio e o deixarmos livre ele oscilará de um lado para outro como vemos na Figura 9.1. Figura 9.1 Este sistema toma o nome de pêndulo simples ou pêndulo matemático. O tempo que o corpo gasta para oscilar de um lado para outro é sempre o mesmo e tem o nome de duração da oscilação e usamos para este tempo a letra . A fórmula para o cálculo deste pêndulo é obtida por meio da matemática superior e é: Nessa fórmula é a distância do ponto fixo do fio ao centro de gravidade do corpo suspenso e a aceleração da gravidade. Devemos notar que o peso do fio deve ser muito pequeno em relação ao peso do corpo. Devemos lembrar que a aceleração da gravidade é variável devido à rotação da Terra e seu achatamento nos pólos e pode ser representada pela fórmula abaixo onde é a latitude geográfica do lugar onde se está fazendo a experiência: 10. Choque dos corpos Já vimos que quando uma força atua sobre um corpo por certo tempo ela comunicará a este um movimento uniformemente acelerado e a velocidade final é dada pela fórmula: Também vimos que a força é igual à massa do corpo pela aceleração ou: Dessas duas equações podemos tirar: O produto toma o nome de impulso mecânico e o produto toma o nome de quantidade de movimento da massa m. Esta equação pode tomar o nome de teorema do impulso e se aplica quando os corpos se chocam. Os choques dos corpos podem ser entre corpos elásticos ou inelásticos. No caso dos corpos inelásticos supondo que eles se movem namesma direção e sentido e que após o choque ambos continuam em movimento juntos e tomam uma velocidade comum que pode ser calculada pela fórmula abaixo onde m1 e m2 são as massas dos corpos e v1 e v2 suas velocidades antes do choque e V a velocidade após o choque. Se antes do choque os corpos tinham direções opostas o sinal de m2 pode ser tornado negativo na fórmula acima. No choque de corpos elásticos deve-se distinguir dois períodos distintos. Em um primeiro tempo os corpos se aplainam e no segundo as forças elásticas atuam para separar os corpos e nesta fase o trabalho consumido na compressão dos corpos é devolvido. Respostas aos exercícios 1. 9990 m 2. 50 m/s 3. 30 m/s 4. 20,4 m/s 5. 78,5 m 6. 6,11 segundos 7. 58,9 m 8. 0,029 m/s 9. 2250 kgm 10. 50000 kgm 11. B 12. C 13. B
Baixar