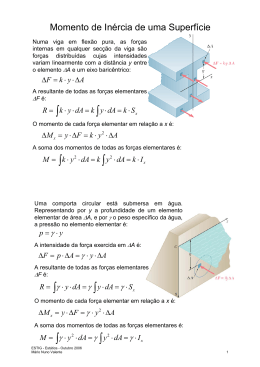
INSTITUTO SUPERIOR TÉCNICO TENSOR DE INÉRCIA EM REFERENCIAIS ORTONORMADOS (A. F. Tovar de LemosU 1932-1992) AEIST, Outubro de 1998 TENSOR DE INÉRCIA EM REFERENCIAIS ORTONORMADOS Índice 1 - Definição geral de momento de inércia 1.1 - Sistemas discretos ………………………………………………………3 1.2 - Sistemas contínuos ……………………………………………………...4 1.3 - Raio de giração ………………………………………….………………5 2 - Momentos em relação a um referencial ortonormado 2.1 - Expressões em função das coordenadas ………………………………...6 2.2 - Relações entre os momentos no mesmo referencial ……………….……7 3 - Produtos de inércia ………………………………………………………………..8 4 - Matriz e tensor de inércia. Direcções e momentos principais de inércia. Elipsóide de inércia 4.1 - Matriz de inércia …………………………………………...……………8 4.2 - Tensor de inércia. Direcções e momentos principais de inércia. Elipsóide de inércia ……………………………………….………...…10 5 - Cálculo do momento de inércia em relação a uma recta qualquer, utilizando a matriz de inércia ………………………………...………………………………13 6 - Teorema de Lagrange-Steiner …………………………………..……………….15 7 - Aplicação às áreas planas 7.1 - Posição do problema …………………………………………………..19 7.2 - Elipse de inércia ……………………………………………………….21 7.3 - Considerações de carácter dimensional …………………………….….21 7.4 - Circulo de Mohr e elipse de Cullman ………………………………….22 2 1 - Definição geral de momento de inércia 1.1 - Sistemas discretos Seja dado um sistema material de partículas P1, P2, ...Pn de massas respectivamente m1, m2,….mn (Fig.1). Represente-se por Pk a partícula genérica do sistema de massa mk. P1 ( m 1 ) P2 ( m 2 ) Pk ( m k ) P3 ( m 3 ) Fig. 1 Dado um elemento geométrico qualquer (ponto, recta ou plano) define-se momento de inércia do sistema material em relação a esse elemento geométrico pela expressão n I = ∑ m k rk2 (1.1) k =1 onde rk representa a distância da partícula genérica Pk ao elemento geométrico considerado. Na Fig. 2 representam-se as distâncias a considerar respectivamente para o momento de inércia em relação a um ponto O (Io), a uma recta r (Ir) e a um plano π (Iπ). Claro que, no caso da recta r e do plano π, as distâncias se medem perpendicularmente ao elemento respectivo. r1 r P1 ( m 1 ) r1 O P2 ( m 2 ) r2 r3 rk r3 r2 rk r2 Pk ( m k ) r1 rk P3 ( m 3 ) r3 π Fig. 2 Da definição dada, resulta que um momento de inércia é uma grandeza escalar essencialmente não negativa. Normalmente será positiva e, excepcionalmente poderá ser nula, o que exige então que todas as partículas existam sobre o elemento 3 geométrico considerado (por exemplo, é nulo o momento de inércia de uma figura plana em relação ao seu próprio plano). 1.2 - Sistemas contínuos Suponhamos agora que o sistema material considerado é, não um sistema discreto como se considerou anteriormente, mas um sistema material contínuo. É o caso, por exemplo, representado na Fig.3 em que se supõe a massa distribuída de uma forma contínua (embora não necessariamente homogénea), num volume V. Suponhamos que se pretende calcular o momento de inércia do sistema material contínuo, assim definido, em relação a um plano π. P V r π Fig. 3 Represente-se agora simplesmente por P a partícula genérica e por r a distância dessa partícula ao plano π. O número de partículas a considerar será agora infinito e por isso o somatório da expressão (1.1) transforma-se em integral. Designando por dm a massa elementar contida na vizinhança da partícula genérica P, a referida expressão (1.1) escreve-se agora, aplicada ao momento de inércia em relação ao plano π I = ∫ r 2 dm (1.2) M sendo M a massa total do sistema. Claro que os momentos de inércia do sistema em relação a qualquer recta ou ponto dariam origem a integrais semelhantes a (1.2). A determinação de qualquer integral do tipo (1.2) aplicado a um sistema material contínuo distribuido em volume pode efectuar-se através do cálculo de um integral de volume, recorrendo ao conceito de densidade mássica em volume em cada ponto, definida como se sabe por ∆m ρ V (P) = lim (1.3) ∆V →0 ∆V e que permite pôr então 4 dm = ρ V (P) dV (1.4) I = ∫ r 2ρ V (P) dV (1.5) e introduzindo em (1.2) fica pois V Se o sistema for homogéneo, ρV ( P ) pode evidentemente passar-se para fora do integral pois é constante no domínio. Analogamente se se estiver em presença de uma distribuição contínua de massa em superfície (Fig.4) ou em linha (Fig.5) S L Fig. 5 Fig. 4 pode recorrer-se aos conceitos de densidade mássica em superfície ∆m ∆S→0 ∆S ⇒ dm = ρS (P) dS (1.6) ∆m ∆s → 0 ∆ s ⇒ dm = ρ s ( P ) ds (1.7) ρS (P) = lim ou em linha ρ s ( P ) = lim recaindo-se então no cálculo, respectivamente, de um integral de superfície I = ∫ r 2ρS (P) dS (1.8) S ou de um integral curvilíneo I = ∫ r 2ρs (P) ds (1.9) L para determinar um momento de inércia qualquer nesses casos. 1.3 - Raio de giração Considere-se um sistema material de massa total M e seja I um momento de inércia desse sistema em relação a um elemento geométrico qualquer (ponto, recta ou plano). 5 Chama-se raio de giração do sistema, em relação ao elemento geométrico considerado, à grandeza K definida por I = M K2 ⇒ K= I M (1.10) É falso concluir que o raio de giração tem as dimensões de um comprimento. Com efeito, num sistema de grandezas fundamentais (MLT), por exemplo, será [I] = M L2 [M ] = M [K ] = L ⇒ (1.11) O raio de giração é susceptível de interpretação geométrica. Representa a distância ao elemento geométrico em causa, a que se deveria localizar toda a massa do sistema para produzir o mesmo momento de inércia. 2 - Momentos em relação a um referencial ortonormado 2.1 - Expressões em função das coordenadas Seja dado novamente um sistema material discreto (a passagem a um sistema contínuo faz-se de forma análoga à utilizada na passagem da expressão (1.1) para (1.2)). Por outro lado, seja dado um referencial ortonormado, relativamente ao qual as coordenadas da partícula genérica Pk se representam por xk, yk e zk (Fig. 6). z P1 yk P2 xk P3 Pk zk O y x Fig. 6 6 Vamos calcular os momentos de inércia do sistema em relação: aos planos coordenados, aos eixos coordenados e à origem O. Assim, por exemplo, o momento de inércia em relação ao plano xy será definido evidentemente por n I xy = ∑ m k z 2k (2.1) k =1 Se não houver motivo para confusão, podem suprimir-se os índices e escrever-se simplesmente (2.1) na forma I xy = ∑ m z 2 (2.2) Nessas condições, os momentos de inércia em relação aos restantes planos coordenados escrevem-se I yz = ∑ m x 2 , I xz = ∑ m y 2 (2.3) Analogamente, os momentos de inércia em relação aos eixos coordenados x, y e z, podem escrever-se ( Ix = ∑ m y2 + z 2 ) ( Iy = ∑ m x 2 + z2 , ) ( Iz = ∑ m x 2 + y2 , ) (2.4) e o momento de inércia em relação à origem ( IO = ∑ m x 2 + y 2 + z 2 ) (2.5) Os momentos de inércia em relação aos eixos representam-se vulgarmente pelas letras A, B e C e portanto será Ix = A , Iy = B Iz = C , (2.6) 2.2 - Relações entre os momentos no mesmo referencial Das expressões obtidas no parágrafo anterior, podem deduzir-se relações de muito interesse entre os momentos de inércia em relação aos elementos do triedro cartesiano, que são as seguintes: A = I x = I xy + I xz , B = I y = I xy + I yz , C = I z = I xz + I yz I O = I xy + I xz + I yz = A + I yz = B + I xz = C + I xy = 1 (A + B + C ) 2 (2.7) Note-se que estas expressões são aplicáveis a quaisquer 3 rectas ortogonais que se intersectem num mesmo ponto do espaço. Assim, por exemplo, pode dizer-se que o 7 momento de inércia em relação a um ponto O é igual à soma do momento de inércia em relação a uma recta r qualquer passando pelo ponto, com o momento de inércia em relação ao plano π perpendicular à recta que passe pelo mesmo ponto (Fig.7). O r π Fig. 7 3 - Produtos de inércia Considerando um sistema material discreto, de partícula genérica P(x,y,z) e massa m, definem-se produtos de inércia e representam-se pelas letras D, E e F as grandezas D = ∑m x y , E = ∑m x z , F = ∑m y z (3.1) onde o somatório é estendido a todas as partículas do sistema. São grandezas com as mesmas dimensões físicas dos momentos de inércia (ML2) mas, contrariamente ao que sucedia com estes, os produtos de inércia podem ser negativos. No caso de o sistema material ser contínuo, o cálculo dos produtos de inércia faz-se substituindo os somatórios das equações (3.1) por integrais nos respectivos domínios. Assim, por exemplo D = ∫ x y dm M , E = ∫ x z dm M , F = ∫ y z dm (3.2) M 4 - Matriz e tensor de inércia. Direcções e momentos principais de inércia. Elipsoide de inércia 4.1 - Matriz de inércia Dado um sistema material e um referencial ortonomado qualquer (x,y,z,) de origem num ponto O, vamos considerar agora 6 grandezas de entre as anteriormente definidas: (i) A, B e C (momentos de inércia em relação aos eixos x, y e z) e (ii) D, E e F (produtos de inércia em relação a pares destes eixos). 8 z O y x Fig. 8 Dispondo estas grandezas numa matriz simétrica, tendo o cuidado de previamente trocar o sinal dos três últimos, define-se a chamada matriz de inércia no ponto O do sistema material dado e referida aos eixos (x,y,z) considerados, ou seja: A − D − E I = − D B − F (4.1) − E − F C A disposição das 6 grandezas indicadas por forma a constituirem a matriz de inércia revela-se muito útil na apresentação de certos cálculos de Mecânica em forma matricial. Por outro lado, permite aplicar o Cálculo Matricial ao problema de saber como variam as componentes da matriz de inércia (e portanto os momentos e produtos de inércia) do mesmo sistema material relativa ao mesmo ponto O, mas referida a outros eixos com origem nesse ponto, digamos eixos ( x ′, y ′, z ′) (Fig. 9). O problema resolve-se considerando simplesmente a transformação linear (neste caso ortogonal) que corresponde à mudança de eixos indicada e afectando a matriz I dessa transformação. Nos novos eixos obter-se-á assim uma nova matriz, A' − D' − E ' I' = − D' B' − F' − E' − F' C' (4.2) onde A’, B’ e C’ representam os momentos de inércia em relação aos novos eixos e D’, E’ e F’ representam os produtos de inércia respectivos. 9 z z′ y′ O y x x′ Fig. 9 4.2 - Tensor de inércia. Direcções e momentos principais de inércia. Elipsoide de inércia. Pode dizer-se que a matriz de inércia não é mais do que a disposição matricial dos elementos de um tensor de 2ª ordem definido por ( Iij = ∑ m δij x s x s − x i x j ) (4.3) Nesta expressão xi (ou xj, ou xs) representa as coordenadas x1=x, x2=y e x3=z, da partícula genérica de massa m, e o somatório é estendido a todas as partículas, tendose suprimido o índice de soma, como se fez por exemplo na passagem das expressões (2.1) para (2.2), isto é, a expressão completa seria I ij = ∑ m k ( ij x ks x ks − x ki x kj ) n (4.4) k =1 Suprimindo o índice k, que apenas significaria que a coordenada se refere à partícula k, obtem-se (4.3) como foi dito. Nesta mesma expressão (4.3), figura por outro lado o conhecido símbolo de Kronecker δij. Além disso, o índice repetido s significa que deve aplicar-se a convenção de Einstein (ou convenção de soma). Sendo assim, o cálculo das componentes do tensor de inércia torna-se imediato. Com efeito, será por exemplo ( ) ( I11 = ∑ m x 2 + y 2 + z 2 − x 2 = ∑ m y 2 + z 2 10 ) (4.5) que representa pois (vidé (2.4)) o momento de inércia Ix=A e situação análoga se dá para I22=B e I33=C. Por outro lado, as componentes não diagonais fornecem por exemplo I12 = ∑ m(0 − xy) = −∑ m x y (4.6) que representa (-D) como se pretendia (vidé (3.1)). Finalmente note-se que, se o sistema material fosse contínuo e não discreto, a expressão (4.3) tomaria a forma Iij = ∫ (δij x s x s − x i x j )dm (4.7) M É evidente da análise de (4.3) que esta expressão define uma grandeza com 2 índices (portanto de 2ª ordem), simétrica, mas não se provou que seja efectivamente um tensor. Tal demonstração não será aqui feita, limitando-nos a indicar que, para o fazer, bastava considerar 2 sistemas de eixos com a mesma origem, calcular os momentos e produtos de inércia do mesmo sistema material num e noutro caso e verificar que entre eles se verificam as relações que corresponderiam a aplicar a Iij as leis de transformação tensorial. Admitindo pois que Iij é um tensor simétrico de 2ª ordem, são-lhe agora aplicáveis as propriedades estudadas para este tipo de tensores no cálculo tensorial, designadamente a existência de direcções principais e valores principais que, neste caso, se designam respectivamente direcções e momentos principais de inércia do sistema material, no ponto O considerado. zp O yp xp Fig. 10 Vale a pena sublinhar o significado da existência de direcções principais de inércia de um sistema num ponto O. Quer isso dizer que é possível determinar 3 direcções 11 ortogonais xp, yp e zp (Fig. 10) tais que, em relação a elas, o sistema tem os 3 produtos de inércia nulos. Os momentos de inércia I1, I2 e I3 em relação a essas direcções são os momentos principais e a matriz de inércia fica diagonalizada I1 0 I = Iij = 0 I 2 0 0 [ ] 0 0 I3 (4.8) Aliás, como se sabe, os conceitos de direcções principais e componentes principais podem definir-se mesmo em Cálculo Matricial. Em certos casos, as direcções principais de inércia são indeterminadas, o que corresponderá a dois dos momentos principais (ou mesmo a três) serem iguais. Analogamente pode associar-se ao tensor de inércia o conceito conhecido de quádrica tensorial, que dá origem neste caso ao chamado elipsóide de inércia. A sua equação escreve-se Iij x i x j = 1 (4.9) com a dupla soma (em i e j) no 1º membro. Desenvolvendo esta soma e designando os momentos e produtos, respectivamente por A, B, C e D, E, F, fica Ax 2 + By 2 + Cz 2 − 2Dxy − 2Exz − 2Fyz = 1 (4.10) Dado um sistema material qualquer (Fig.11) e um ponto O também qualquer, será esta a equação do elipsóide de inércia do sistema no ponto O, referido aos eixos (x,y,z) com origem em O. z O y x Fig. 11 12 Se os eixos variarem, a equação do mesmo elipsóide variará também em conformidade, sendo que, quando os eixos escolhidos forem os eixos principais de inércia em O, a equação (4.10) se escreverá, tendo presente (4.8) I1x 2p + I 2 y 2p + I3z 2p = 1 (4.11) onde xp, yp e zp representam as coordenadas do ponto corrente do elipsóide nos eixos principais. Estes serão, por seu turno, os eixos de simetria do elipsóide, em relação aos quais ele poderá ser escrito na conhecida forma 2 2 2 x y z + + =1 a b c (4.12) onde a, b e c são as medidas do semi-eixos. Para obter essas medidas neste caso, basta transformar (4.11) da seguinte forma 2 x p yp + 1 I 1 I 1 2 2 zp + 1 I 3 2 =1 (4.13) o que mostra que o raio vector segundo cada direcção principal é igual ao inverso da raiz quadrada do momento principal de inércia respectivo. Esta conclusão será depois generalizada para um vector qualquer no elipsóide e o momento de inércia em relação à recta correspondente a esse raio vector. A escrita das características de inércia agrupadas em forma de matriz de inércia mostra-se cómoda para traduzir a equação do elipsóide de inércia. Com efeito, se representarmos por X a matriz coluna das coordenadas, ou seja x X = y z imediatamente se conclui que (4.9) pode escrever-se XT I X = 1 (4.14) (4.15) onde I é a matriz de inércia. 5 - Cálculo do momento de inércia em relação a uma recta qualquer, utilizando a matriz de inércia Seja um sistema material qualquer, por exemplo contínuo, e uma recta R do espaço, r definida por um ponto O e um dos seus versores λ (Fig.12). 13 z r λ P r P1 O y R x Fig. 12 O momento de inércia do sistema em relação a esta recta define-se, como foi dito, por I R = ∫ r 2dm (5.1) M onde r representa a distância de cada partícula P à recta. Mas da Fig. 12 conclui-se que, sendo P1 o pé da perpendicular baixada da partícula P sobre a recta, se verifica 2 ( 2 r 2 = OP − OP1 = OP ⋅ OP − OP ⋅ λ ) 2 (5.2) Considerando um referencial de origem em O, rem relação ao qual as coordenadas de P se representam por xi e as componentes de λ por λi (cosenos directores da recta), pode escrever-se (5.1), tendo presente (5.2). na forma ( ) I R = ∫ x s x s − x i λ i x jλ j dm M (5.3) r Mas, sendo λ por hipótese unitário, note-se que é válida a identidade δijλ i λ j = 1 (5.4) e o 1º membro dentro do parêntesis não fica alterado se escrevermos (5.3) na forma ( ) I R = ∫ x s x s δijλ i λ j − x i λ i x jλ j dm M (5.5) Finalmente, como λi e λj (componentes do vector unitário da recta R) são independentes do domínio de integração, que é o sistema material, podem ser postas fora do integral e portanto (5.5) escreve-se ainda 14 I R = ∫ ( ij x s x s − x i x j ) dm λ i λ j M (5.6) ou ainda, atendendo a que o integral representa Iij (vidé (4.7)) I R = Iij λ i λ j (5.7) Esta expressão permite calcular o momento de inércia do sistema em relação a uma recta R, conhecido o tensor de inércia num ponto qualquer dessa recta. Analogamente ao que foi dito a propósito de (4.10), a expressão (5.7) toma a forma I R = Aα 2 + Bβ 2 + Cγ 2 − 2Dαβ − 2Eαγ − 2Fβγ (5.8) se os cosenos directores forem representados, como habitualmente, por α, β, e γ. Em face das expressões obtidas, é fácil agora mostrar que o elipsóide de inércia definido no § 4.2 representa o lugar geométrico dos pontos P do espaço, de coordenadas x1 cuja distância a O é igual a OP = 1 IR (5.9) Com efeito, considerando a expressão (5.7), podemos exprimir nela as componentes λi através das coordenadas xi de P, marcado como se disse. Com efeito, será λi = xi xi = OP 1 I R (5.10) e então, substituindo em (5.7), fica I R = Iij xj xi 1 IR 1 IR ⇔ Iij x i x j = 1 (5.11) Este facto permite considerar o elipsóide de inércia como um autêntico diagrama espacial para a determinação dos momentos de inércia em relação às infinitas rectas que passam por O. Assim se justifica, como caso particular, o que atrás foi dito a propósito da expressão (4.13). 6 - Teorema de Lagrange - Steiner No parágrafo anterior vimos como é possível calcular o momento de inércia de um sistema material em relação às infinitas rectas que passam por um determinado ponto O, conhecido o tensor de inércia nesse ponto. 15 Muitas vezes, todavia, põe-se o problema de conhecer o momento de inércia em relação a outra recta qualquer do espaço, não passando por O. Um processo seria escolher sobre essa recta um ponto qualquer, calcular nesse ponto directamente o tensor de inércia e aplicar novamente o referido na secção 5. Sucede porém que é possível estabelecer uma relação directa entre os tensores de inércia em dois pontos diferentes, o que é objecto do chamado Teorema de LagrangeSteiner. Note-se que no caso geral estes dois pontos serão quaisquer do espaço, pertençam ou não ao corpo. Para simplificar, vamos considerar o caso de um dos pontos ser o centro de massa G do sistema e o outro um ponto qualquer O. Esta consideração não diminui a possibilidade de aplicar o teorema a dois pontos quaisquer, como depois se verá. Seja então o corpo (Fig.13) e considerem-se dois referenciais paralelos de origens em G e O. Representam-se, respectivamente, por (X, Y, Z) e (x, y, z) as coordenadas da partícula genérica em relação a estes referenciais. z Z P O y az G x ax Y ay X Fig. 13 Representando ainda por ax, ay e az as coordenadas do ponto O no referencial de origem em G, será X = x + ax Y = y + ay , , Z = z + az (6.1) Suponhamos então que se pretende calcular o momento de inércia IOx do sistema em relação ao eixo x passando por O. Será, tendo em conta as relações (6.1) ( = ∫ (Y ) [( + Z )dm + ∫ (a I Ox = ∫ y 2 + z 2 dm = ∫ Y − a y M M M 2 2 2 y )2 + (Z − a z )2 ]dm = ) + a 2z dm − 2 ∫ a y Ydm − 2 ∫ a z Zdm M M (6.2) M Note-se agora o seguinte, acerca do 2º membro desta expressão: (i) O 1º integral representa o momento de inércia IGx em relação ao eixo X passando por G. 16 (ii) No 2º, 3º e 4º integrais, aparecem as grandezas ay, az, e (ay2+az2) que são independentes do domínio de integração e podem, por isso, colocar-se fora dos integrais. Nestas condições e atendendo ainda a que ∫ dm = M (6.3) M representa a massa total do sistema, (6.2) pode escrever-se ( ) I Ox = I Gx + M a 2y + a 2z − 2a y ∫ Ydm − 2a z ∫ Zdm M (6.4) M Mas, sendo G o centro de massa, os dois últimos integrais de (6.4) são nulos. Por outro lado, (ay2+az2) representa o quadrado da distância dx entre os eixos Ox e GX, como facilmente se conclui considerando um triângulo rectângulo de catetos ay e az. (x ) O dx (X) az ay Fig. 14 Logo, será (Fig.14) a 2y + a 2z = d 2x (6.5) I Ox = I Gx + Md 2x (6.6) e a expressão (6.4) fica Representando agora IOx por A e IGX por AG, isto é, os momentos de inércia em relação a um eixo x qualquer e em relação a um outro eixo X paralelo passando pelo centro de massa G, pode pôr-se mais simplesmente A = A G + Md 2x (6.7) Relações análogas poderiam escrever-se para os momentos de inércia em relação aos eixos y e z, na forma B = BG + Md 2y (6.8) 17 C = C G + Md 2z (6.9) As relações (6.7) a (6.9) traduzem a parte do Teorema de Lagrange-Steiner relativa à transformação de momentos de inércia em relação a eixos paralelos. A segunda parte refere-se à transformaçãode produtos de inércia em relação a eixos também paralelos. Assim, seja o produto de inércia D em relação aos eixos (x,y) e considerem-se novamente as expressões (6.1). Vem ( ) D = ∫ xydm = ∫ (X − a x ) Y − a y dm = M M = ∫ XYdm + M a x a y (6.10) M anulando-se os restantes integrais por razões análogas às já apontadas. Representando o 1º integral do 2º membro por DG visto ser um produto de inércia, fica por fim D = DG + M a x a y (6.11) Note-se que, nesta expressão, ax e ay representam as coordenadas X e Y do ponto O (coordenadas que entram no produto de inércia que se está a transformar), no referencial baricêntrico. Analogamente viria para os outros dois produtos de inércia E = EG + M a x a z (6.12) F = FG + M a y a z (6.13) Estas três últimas expressões completam o Teorema de Lagrange-Steiner e portanto as leis de transformação do tensor de inércia. Faz-se notar que, quando for necessário relacionar características de inércia do mesmo sistema em relação a referenciais paralelos, nenhum deles com origem no centro de massa, basta aplicar duas vezes o Teorema de Lagrange-Steiner, primeiro entre uma das origens e o centro de massa e, em seguida, entre esta e a segunda origem de eixos. Por fim, deixa-se registado que existem teoremas análogos à parte do Teorema de Lagrange-Steiner respeitante à transformação de momentos de inércia em relação a rectas paralelas, teoremas esses agora referentes a pontos e a planos paralelos. 7 - Aplicação às areas planas 7.1 - Posição do problema Tem muito interesse em Resistência de Materiais o cálculo de momentos e produtos de inércia de áreas planas (consideradas como corpos bidimensionais) em relação a rectas ou a pontos do seu plano. 18 Para corpos nestas condições, o que sucede é que as expressões gerais atrás deduzidas apresentam certas simplificações a que vale a pena fazer uma referência explicita. Consideremos então uma área plana qualquer do plano xOy (Fig.15). z O y x Fig. 15 Nestas condições, o momento de inércia em relação ao plano xOy será nulo I xy = 0 (7.1) e de (2.7) resulta então que os momentos em relação aos eixos são A = I x = I xz , B = I y = I yz , C = I z = I xz + I yz = A + B (7.2) e o momento em relação à origem IO = I z = I xz + I yz = A + B (7.3) que é chamado momento polar de inércia. A propósito desta última expressão convem notar que, se os eixos (x,y) fossem rodados em conjunto no seu plano em torno de O, o momento em relação a O continuaria a ser igual à soma dos momentos em relação aos dois eixos na nova posição. Quanto aos produtos de inércia, temos agora, de acordo com as considerações anteriores, que E=F=0 e portanto, só o produto de inércia D será diferente de zero. Atendendo a tudo o que foi dito, compreende-se imediatamente que ao tensor de inércia (4.1) se passa a dar a seguinte disposição matricial 0 A −D I = − D B 0 0 0 A + B 19 (7.4) relativamente a um par de eixos qualquer (ortogonais) do plano da figura passando por O e um 3º eixo perpendicular ao plano, passando pelo mesmo ponto. y x1 y1 x O Fig. 16 Imediatamente se compreenderá que, se o par de eixos escolhidos coincidir com as duas direcções principais em O do plano da figura (x1, y1, na Fig. 16), coincidindo a 3ª direcção principal com o eixo z, então (7.4) poderá escrever-se I1 0 I = 0 I 2 0 0 0 0 I1 + I 2 (7.5) Uma consequência que imediatamente resulta do que foi dito é que a expressão (5.8) relativa ao momento de inércia em relação a uma recta qualquer do espaço passando por O se escreve agora I R = Aα 2 + Bβ 2 + (A + B) γ 2 − 2Dαβ (7.6) Claro que, se a recta pertencer ao próprio plano da figura continuando a passar por O, a simplificação é maior ainda I R = Aα 2 + Bβ 2 − 2Dαβ (7.7) 7.2 - Elipse de inércia No ponto O pode definir-se o elipsóide de inércia da figura plana cujos eixos serão, evidentemente, as duas direcções principais (1) e (2) referidas em (7.5) e o eixo, perpendicular ao plano da figura, passando por O. Em relação a um sistema de eixos quaisquer (x,y,z) cujo eixo z é este último eixo perpendicular ao plano da figura, a equação do elipsóide será (vidé (4.10)) 20 Ax 2 + By 2 + (A + B)z 2 − 2Dxy = 1 (7.8) e, quando referida a eixos principais (4.11), I1x 2p + I 2 y 2p + I3z 2p = 1 (7.9) A intersecção do elipsóide de inércia com o plano da figura é, consequentemente, uma elipse que se chama elipse de inércia da figura no ponto O. Esta elipse pode, ocasionalmente, degenerar em circunferência, se o elipsoide de inércia for de revolução em torno do eixo z. Se o ponto O for o centro de massa, a elipse de inércia toma o nome de elipse central de inércia. Claro que a elipse de inércia pode ser utilizada para determinar os momentos de inércia em relação às infinitas rectas passando por O, bastando utilizar o raciocínio semelhante já feito para o elipsóide de inércia. 7.3 - Considerações de carácter dimensional Fisicamente, as dimensões de qualquer momento de inércia são evidentemente (ML2). No caso das áreas planas que estamos a estudar, dado que qualquer momento de inércia de um sistema plano (x,y) é da forma I = ∫ ρSr 2dS = ∫∫ ρSr 2 dxdy (7.10) S a introdução do referido momento de inércia deve-se à existência de uma densidade mássica em superfíice ρS com as dimensões (ML-2). Analogamente, a massa total, que é definida por um integral da forma M = ∫∫ ρSdxdy (7.11) terá evidentemente as dimensões de (M). Em Resistência de Materiais, o estudo das áreas planas tem interesse no cálculo das peças através da geometria da respectiva secção normal ao eixo. Por isso, costuma arbitrar-se ρ=1 e adimensional. Deste facto, resulta imediatamente que [I] = L3 e 21 [M ] = L2 (7.12) quer dizer, os momentos de inércia passam a ser expressões na 4ª potência de unidades de comprimento (cm4, mm4, etc.) e as massas são medidas pela área (cm2, mm2, etc.). 7.4 - Círculo de Mohr e elipse de Cullman Uma vez que, como se viu, o tensor de inércia é um tensor simétrico de 2ª ordem, pode-se-lhe aplicar o método do Círculo de Mohr o qual, para o caso das áreas planas, degenera na Circunferência de Mohr. Uma vez que se trata de assunto já bem conhecido, praticamente nada há a dizer sobre ele, a não ser chamar a atenção para o facto de a circunferência nunca poder ser secante do eixo das ordenadas (produtos de inércia), uma vez que não existem momentos de inércia (abcissas) negativos. Outro método que, tal como o Círculo de Mohr, pretende estudar graficamente a variação dos momentos de inércia de um sistema material plano em relação às rectas do seu plano é o da chamada elipse de Cullman que, como se vai ver, trabalha com os raios de giração, atrás definidos no §1.3. Assim, consideremos o ponto O e as direcções principais de inércia nesse ponto (1) e (2) (Fig.17) e marquemos uma elipse tomando para semi-eixo em cada direcção o raio de giração correspondente à outra direcção. Assim, sendo I1 e I2 os momentos principais de inércia, vem I1 = MK12 I 2 = MK 22 e (7.13) e portanto na Fig. 17 é OP1 = K 2 e OP2 = K 1 . P2 2≡ y K2 θ R P K1 O P1 1≡ x P′ Q Fig. 17 Esta elipse permite, dada uma recta R qualquer passando por O, determinar o raio de giração correspondente a essa recta. Com efeito, seja P o ponto de intersecção dessa recta R com a elipse e tracemos uma tangente à elipse, paralela a R, sendo P’ o ponto de tangência. A direcção OP’ define, como se sabe, a direcção conjugada com R relativamente à elipse. Finalmente baixemos por O a perpendicular a essa tangente, que a encontra em Q. Vamos demonstrar que a distância O Q representa o raio de giração correspondente à recta R. 22 Para isso, seja a elipse de Cullman referida às direcções principais. Representando por x e y as coordenadas do ponto genérico P, fica x 2 y2 + =1 K 22 K12 (7.14) Mas, por outro lado, sendo θ o ângulo indicado x = OP cos θ e substituindo em (7.14), y = OP senθ e 2 (7.15) 2 OP cos 2 θ OP sen 2θ + =1 K 22 K12 (7.16) o que pode escrever-se cos 2 θ K12 + sen 2θ K 22 = K12 K 22 OP 2 (7.17) Ora sabe-se que, numa elipse, o produto O P ⋅ O Q é constante e igual a K1K2. OP ⋅ OQ = K 1 ⋅ K 2 ⇔ OQ = K1 ⋅ K 2 OP (7.18) logo, (7.17) pode escrever-se na forma cos 2 K12 + sen 2 K 22 = OQ 2 (7.19) Mas K 12 e K 22 podem obter-se de (7.13) e portanto (7.19) escreve-se cos 2 I1 + sen 2 I 2 = M OQ 2 (7.20) Como o 1º membro desta última expressão é justamente IR (7.7) fica I R = M OQ 2 (7.21) e OQ = IR = KR M 23 (7.22)
Baixar