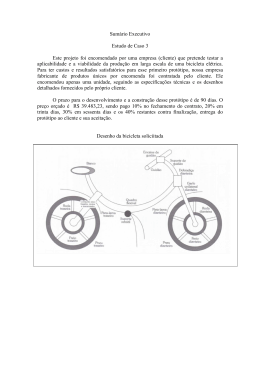
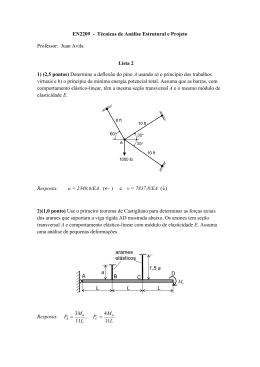
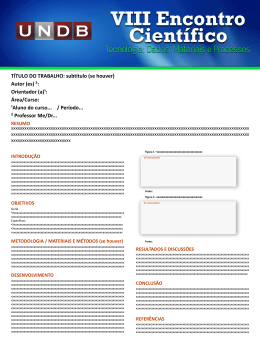
INSTITUTO FEDERAL DE EDUCAÇÃO, CIÊNCIA E TECNOLOGIA DE SÃO PAULO -IFSP CAMPUS SÃO JOSÉ DOS CAMPOS Aimeon Cristovam Elyzandro Polastrini Emily Christie dos Santos Leonardo Chagas da Silva Ubirailton Almeida Ribeiro Pedro Gomes Cavalcanti de Lima Protótipo Plataforma Suspensa Rolante - PPSR Trabalho de Conclusão de Curso apresentado ao Instituto Federal de Educação, Ciência e Tecnologia de São Paulo – Campus São José dos Campos, como requisito para obtenção do Título de Técnico em Mecânica sob orientação do Professor Fernando Henrique Gomes de Souza e Coorientação do Professora Tainá Gomes Rodovalho. São José dos Campos 2014 BANCA EXAMINADORA III Aos nossos queridos familiares e professores. Com muito carinho, Dedicamos IV Agradecimentos Agradecemos primeiramente a Deus, por ter nos dado saúde, força, inteligência e sabedoria, para o desenvolvimento deste projeto. Aos nossos familiares (pais, irmãos, esposas e filhos), por terem nos apoiados nos momentos de grandes dificuldades, nos dando força quando precisamos. Ao Instituto Federal de Educação Ciência e Tecnologia de São Paulo campus São José dos Campos, bem com seu corpo docente, direção, setor administrativo, serviços sócio pedagógicos, inspetores de alunos pelo grande conhecimento oferecido. Queremos fazer um agradecimento especial à inspetora de alunos Rose, pela sua dedicação especial com a qual ela tem nos tratado durante todo o período do curso. Ao nosso amigo Pablo Augusto Viana por te nos ajudado com seus conhecimentos na parte prática deste projeto. Ao professor Fernando Henrique Gomes de Souza, nosso orientador e a professora Tainá Gomes Rodovalho por dedicarem seus preciosos tempos, a correção, revisão e suporte ao nosso trabalho, se colocando sempre à disposição para tirar nossas dúvidas e nos dar auxílio incondicional ao projeto. A professora Vania Battestin Wiende por contribuir com seus conhecimentos para a elaboração desta monografia. Ao professor Rômulo por ter contribuído com seus conhecimentos de elétrica com a escolha do motor. E por fim agradecemos a todos que colaboraram direto e indiretamente na elaboração do nosso projeto. V "Mas os que esperam no Senhor renovarão as forças, subirão com asas como águias; correrão, e não se cansarão; caminharão, e não se fatigarão." ISAÍAS 40:31 VI RESUMO Este Trabalho de Conclusão de Curso (TCC) consiste na criação de um protótipo de uma Plataforma Suspensa Rolante (PSR), a qual serve como base para trabalhadores em limpeza e manutenção de plenum de cabines em geral. Para a elaboração do projeto foram necessárias pesquisas na área dos equipamentos de elevação e transporte, em especial as pontes rolante, visto que é a máquina que mais se assemelha ao protótipo proposto. Para que fosse possível a montagem da estrutura, assim como a sua movimentação, houve a necessidade da busca por conhecimentos de elementos de máquina específicos e as fórmulas básicas utilizadas para o dimensionamento estrutural de cada elemento. Após conclusão das pesquisas e finalização dos cálculos de dimensionamento foi realizada a montagem dos elementos que compõem a estrutura da Plataforma Suspensa Rolante (PSR), garantindo assim a movimentação de translação no sentido de avanço. Palavras-chave: Protótipo, Plataforma Suspensa Rolante, plenum, Ponte rolantes. VII ABSTRACT This Final Paper consists on the creation of a Suspended Travelling Platform prototype to be used as a base by cleaners and maintenance workers of general cabins plenum. Researches in the area of lifting and transportation equipment’s were required on the development of this project, especially regarding Overhead Travelling Cranes, the machine which is most similar to the proposed prototype. To be able to mount the structure as well as its handling, it was necessary to search for specific knowledge on the machine elements and for the basic formulas used on the structural design of each element. At the conclusion of the researches and the design calculations, we assembled the elements that make up the framework of the Suspended Travelling Platform, thus ensuring the translational movement in the forward direction of the same. Keywords: Prototype, Suspended Rolling Platform, plenum, Overhead Travelling Cranes. VIII SUMÁRIO LISTA DE TABELA .................................................................................................... X 1. INTRODUÇÃO ................................................................................................... 11 2 OBJETIVOS ....................................................................................................... 12 2.1 Geral .........................................................................................................................................................12 2.2 Específicos.................................................................................................................................................12 3. REVISÃO BIBLIOGRÁFICA .............................................................................. 12 3.1 Máquinas de elevação e transporte ..................................................................................................12 3.2 Componentes da plataforma suspensa rolante ......................................................................................14 3.2.1 Sistema de transmissão ..........................................................................................................................15 3.2.1.1Transmissão por polias e correia .......................................................................................................15 3.2.1.2 Mancais de Rolamento ....................................................................................................................16 3.2.1.3 Eixos e árvores.................................................................................................................................17 3.2.2 Motorização e potência ..........................................................................................................................18 3.2.3 Movimentação .......................................................................................................................................19 3.2.3.1 Trilhos .............................................................................................................................................19 3.2.3.2 Rodas de translação .........................................................................................................................19 3.2.4 Estruturas ...............................................................................................................................................20 3.2.4.1 Vigas ...............................................................................................................................................20 4. MATERIAIS E MÉTODOS ................................................................................. 24 4.1 Materiais ...............................................................................................................................................24 a) Estrutura da plataforma: ....................................................................................................................24 b) Equipamentos de movimentação: ......................................................................................................25 c) Transmissão de potência: ........................................................................................................................25 4.2 Métodos ................................................................................................................................................25 a) Construção da estrutura da plataforma: ............................................................................................26 b) Construção do mecanismo de translação e sustentação da plataforma; ..............................................26 c) Estrutura e os componentes da transmissão de força .........................................................................27 5. CONCLUSÕES .................................................................................................. 30 6. SUGESTÕES PARA TRABALHOS FUTUROS................................................. 31 REFERÊNCIAS ......................................................................................................... 32 IX LISTA DE FIGURA Figura 1 - Elementos da ponte rolante (DEMAG apud. SOARES, 2011). ............. 13 Figura 2 - Relação entre polias com: (a) transmissão direta do sentido de rotação e (b) inversão do sentido de rotação (GENEROSO, 2009). ...................... 15 Figura 3 - Mancal de apoio com uma fileira de esferas (adaptado de Lafer Rolamentos). .................................................................................................................... 17 Figura 4 - Sistema de acionamento e transmissão de potência de um carro de translação (NASSAR). .................................................................................................... 18 Figura 5 - Viga biapoiada com carga pontual na região central. ........................... 20 Figura 6 - Seção 1 da viga biapoiada. ......................................................................... 21 Figura 7 - Seção 2 da viga biapoiada. ......................................................................... 22 Figura 8 - Diagrama da cortante da viga biapoiada. ................................................ 22 Figura 9 - Diagrama do momento fletor da viga biapoiada. ................................... 23 Figura 10 - Perfil da viga caixão com a linha elástica. ............................................ 23 Figura 11-Estrutura da plataforma ............................................................................... 26 Figura 12-mecanismo de translação e sustentação da plataforma ...................... 27 Figura 13 Estrutura e os componentes da transmissão de força ......................... 28 Figura 14-Protótipo Plataforma Suspensa Rolante.................................................. 28 X LISTA DE TABELA Tabela 1 - Dimensionamento da estrutura – vigas. .................................................. 29 Tabela 2 - Dimensionamento dos equipamentos de movimentação. ................... 29 11 1. Introdução Nas cabines das áreas de pintura são utilizadas plataformas suspensas manuais para limpeza e manutenção dos plenum. A movimentação das plataformas suspensas apresenta um elevado grau de dificuldade, ocasionando o desgaste físico nos seus operadores e potencializando os riscos nas execuções de limpeza e manutenção dos plenum. Atualmente tais trabalhos são realizados ignorando todos os riscos ergonômicos e de acidentes aos quais os trabalhadores são submetidos. As consequências desses riscos variam desde uma simples torção a uma lesão lombar, ocasionados devido ao esforço excessivo realizado pelo trabalhador durante o deslocamento manual dessas plataformas. A implantação de uma motorização nas plataformas suspensas apresenta-se como uma solução viável a redução dos riscos e tempo de operação, maximizando o rendimento dos trabalhos de limpeza e manutenção nos plenum. Essa motorização consiste na incorporação de um motor elétrico, cuja rotação é transmitida ao eixo motor da plataforma gerando o movimento desejado. Assim, para verificar o desempenho dessa implantação nas plataformas suspensas foi proposto o desenvolvimento de um protótipo, utilizando os princípios de sustentação e movimentação de pontes rolantes. 12 2 Objetivos 2.1 Geral Desenvolver um protótipo de plataforma suspensa rolante para transporte de pessoas e/ou materiais na execução da limpeza das partes superiores do plenum de cabines em geral. 2.2 Específicos - Dimensionar os elementos do protótipo; - Escolher o material a ser utilizado; - Estimar as cargas máximas carregadas pelo protótipo; - Definir a motorização adequada para o carregamento obtido. 3. Revisão bibliográfica 3.1 Máquinas de elevação e transporte As máquinas de elevação e transporte são construídas conforme as especificações de sua área de aplicação. Essas máquinas são utilizadas nos mais diversos setores industriais e representam uma gama de equipamentos, sendo os mais empregados: os guindastes, as pontes rolantes, os elevadores e os guinchos (NASSAR). Segundo Rudenko (1976), esses equipamentos de elevação e transporte são classificados segundo três principais grupos, os quais são: Máquinas de elevação: tem por finalidade elevar cargas em lotes, consistindo nos pórticos (e pontes) rolantes, elevadores, guindastes. 13 Máquinas de transporte: responsáveis por movimentar cargas em fluxo contínuo, ou seja, transportadores, equipamentos pneumáticos e hidráulicos. Máquinas de superfície: movimentam cargas em lotes embora sejam desprovidos de mecanismos de elevação (carros sem trilhos, carros de via estreita, sistemas de vias elevadas, etc.). Embora por definição as máquinas de elevação destinem-se a movimentação de cargas no sentido vertical, tais equipamentos são versáteis e podem apresentar movimentos horizontais e/ou circulares (RUDENKO, 1976).Dentre tais equipamentos de elevação destacam-se as pontes rolantes pela sua semelhança ao sistema proposto de plataforma suspensa rolante. As pontes rolantes são equipamentos usados para transportar cargas dentro de um espaço pré-determinado, sendo constituída basicamente de duas vigas principais, carro guincho, viga cabeçote e vigas de suporte. O carro guincho percorre todo o comprimento das vigas principais. O tamanho das pontes rolantes é limitado pelas vigas principais, conforme mostra a Figura 1, tendo como vigas de suporte as paredes laterais da fábrica onde estão instaladas (SOARES, 2011). Figura 1 - Elementos da ponte rolante (DEMAG apud. SOARES, 2011). 14 O protótipo da plataforma suspensa rolante apresenta as vigas de sustentação semelhantes ao das pontes rolantes, e no lugar do gancho e do carro guincho tem-se uma plataforma estrutural vazada, a qual consiste no foco do presente projeto. Para garantir a eficiência da plataforma suspensa rolante faz-se necessário adequar seu projeto aos critérios e sequência do dimensionamento das pontes rolantes. Assim, conforme disposto por DIAS (apud. LANGUI,2001), o dimensionamento deverá considerar o tipo de movimentação, as cargas sujeitas, as dimensões (entre vão, altura de elevação, distância do trilho da parede do plenum), a intensidade do trabalho, o ambiente (que no caso do plenum da cabine de pintura o ambiente é fechado), as condições do plenum, a velocidade desejada, o sistema de potência e comando e o percurso. 3.2 Componentes da plataforma suspensa rolante Uma máquina é composta por uma série de componentes e unidade mais simples. Assim, podem ser definidos como elementos das máquinas de elevação todas as peças ou componentes que quando montados corretamente garantem seu perfeito funcionamento. A fim de facilitar o entendimento, os componentes da plataforma suspensa rolante foram divididos segundo grupos de semelhança, os quais são: sistema de transmissão; motorização e potência; movimentação (trilhos e roldanas de translação) e estrutura. 15 3.2.1 Sistema de transmissão 3.2.1.1Transmissão por polias e correia As polias e correias são utilizadas para transmitir potência quando a distância entre os elementos motor e movido é suficientemente grande de modo a impossibilitar o uso de engrenagens. Dentre as vantagens em se utilizar este sistema de transmissão ressalta-se a economia na montagem e manutenção, a ausência de lubrificação, a maior durabilidade e a redução de choques e vibrações devido a sua flexibilidade (SHIGLEY, 1984). As polias são responsáveis pela transmissão do movimento da correia ao eixo movido, sendo firmemente acopladas aos eixos da máquina (motor e movido). Essa transmissão possibilita o movimento ordenado entre o conjunto, sendo de suma importância seu correto alinhamento para que não ocorra o desgaste prematuro de mancais e eixos. O tipo da polia dependerá da sua aplicação, podendo ser planas ou trapezoidais, com ou sem canal (MAIA, 2006). A correia tem por finalidade manter a ligação entre as duas polias, transmitindo a potência do motor, além de permitir variações de velocidade com rotações no mesmo sentido (correia aberta) ou em sentidos opostos (correia fechada) (SHIGLEY, 1984), conforme mostra a Figura 2. Figura 2 - Relação entre polias com: (a) transmissão direta do sentido de rotação e (b) inversão do sentido de rotação (GENEROSO, 2009). A transmissão por polias e correia apresenta o mesmo princípio e relação matemática que a transmissão por engrenagens, sendo a mesma descrita pela equação (1). 16 𝑑 𝑖 = 𝑑 𝑚𝑎𝑖𝑜𝑟 = 𝑚𝑒𝑛𝑜𝑟 𝑛𝑚𝑒𝑛𝑜𝑟 (1) 𝑛𝑚𝑎𝑖𝑜𝑟 Na equação (1) o parâmetro𝑖representa a relação de transmissão, 𝑑𝑚𝑎𝑖𝑜𝑟 o diâmetro da polia maior (mm), 𝑑𝑚𝑒𝑛𝑜𝑟 o diâmetro menor (mm), 𝑛𝑚𝑎𝑖𝑜𝑟 a rotação da polia maior (rpm) e 𝑛𝑚𝑒𝑛𝑜𝑟 a rotação da polia menor (rpm). Para o dimensionamento do comprimento da correia considera-se a distância entre os centros das polias (C) além dos diâmetros das polias conforme mostra a equação (2). 𝑙 = 2𝐶 + 1,57(𝑑𝑚𝑎𝑖𝑜𝑟 + 𝑑𝑚𝑒𝑛𝑜𝑟 ) + (𝑑𝑚𝑎𝑖𝑜𝑟 −𝑑𝑚𝑒𝑛𝑜𝑟 )2 4𝐶 (2) 3.2.1.2 Mancais de Rolamento Os mancais consistem nos elementos das máquinas responsáveis por suportar o eixo e evitar o atrito entre peças, podendo ser lisos (mais simples e baratos) ou de rolamentos (maior durabilidade) (PAULI E ULIANA, 1996). A preferência pelos mancais de rolamento dá-se em casos onde a lubrificação é inviável ou de difícil acesso, quando se requer uma maior economia da potência do motor ou busca-se uma maior segurança de serviço (ERNST,1970). Estes mancais também são utilizados em máquinas com acionamento pouco frequente, como o caso do Protótipo Plataforma Suspensa Rolante (PPSR). Os mancais de rolamentos são constituídos basicamente por dois anéis de aço separados por uma ou duas fileiras de esferas ou rolos, os quais são mantidos uniformemente distribuídos por meio da gaiola (ou separador) conforme mostra a Figura 3. O anel externo de aço é fixado no mancal bipartido, enquanto que o anel interno é ligado diretamente ao eixo (PAULI E ULIANA, 1996). 17 Esferas Anel externo Separador Figura 3 - Mancal de apoio com uma fileira de esferas (adaptado de Lafer Rolamentos). A classificação dos mancais de rolamentos segue os tipos de carregamentos impostos sobre os mesmos, os quais podem ser: radiais (cargas radiais e axiais leves), axiais (solicitados apenas no sentido axial) e mistos (suportam carregamentos axiais e radiais) (PAULI E ULIANA, 1996). Assim, além do tipo de carregamento é necessário analisar a durabilidade dos mancais na hora de sua escolha, observando também as indicações dos fabricantes (ERNST,1970). 3.2.1.3 Eixos e árvores As árvores são elementos mecânicos rotativos ou estacionários responsáveis por sustentar os elementos de transmissão de potência. Assim, os mesmos podem estar sujeitos a esforços de tração, torção, flexão e compressão. Os eixos cumprem o mesmo papel de sustentação das árvores, diferenciando apenas por não estarem sujeitos aos esforços de torção (SHIGLEY, 1984). Para o dimensionamento das árvores são considerados o torque e a rotação das mesmas no ponto de aplicação, levando em consideração o fator de segurança do projeto. Na Figura 4 é apresentado um exemplo de aplicação das árvores na transmissão de potência em um equipamento de elevação e transporte. 18 Engrenagens Acoplamentos Redutor Motor Freio Rodas Motrizes Rodas Movidas Figura 4 - Sistema de acionamento e transmissão de potência de um carro de translação (NASSAR). 3.2.2 Motorização e potência Conforme apresentado na Figura 4, a parte de movimentação do carro ocorre devido à transformação da energia elétrica em energia mecânica realizada pelo motor elétrico. O motor elétrico monofásico tem por princípio de funcionamento a energização dos campos magnéticos girante, gerando uma defasagem de 120°. Essa defasagem dos campos magnéticos em conjuntos com as bobinas do motor cria um campo magnético circular contínuo, o qual é transferido para um eixo no centro, transformando energia elétrica em energia mecânica cinética (ERNST, 1970). A escolha do motor elétrico de um equipamento de elevação e transporte deve garantir a movimentação do carro, ou como no presente projeto, na cabine da Plataforma Suspensa Rolante (PSR). Assim, essa escolha leva em consideração três requisitos de projeto: potência, frequência e rotação. O cálculo da potência do motor leva em consideração o trabalho realizado de deslocamento da massa da cabine durante a translação e o tempo de operação, conforme mostra a equação (3). 𝑃= 𝑊 𝑡 = 𝐹∙𝑑 𝑡 (3) 19 no qual W é o trabalho em (Joule), t o tempo em (s) e P a potência em (W). Observa-se através da equação (3), que o trabalho mecânico consiste no produto da força em (N) pela distância em (m). Para a conversão da potência em (HP) divide-se o resultado da equação (3) por 746 e em (CV) por 735,5. A frequência do motor é obtida através da equação (4), sendo t o tempo em (s) e F a frequência em (Hz). 1 (4) 𝑓=𝑡 Já a rotação (rpm) é definida pelo número de polos (p) e pela frequência (f) conforme apresentado pela equação (5). 𝑛= 120∙𝑓 𝑝 (5) 3.2.3 Movimentação 3.2.3.1 Trilhos Os trilhos consistem no guia das rodas de translação, sendo, portanto fixados nas vigas laterais. Por estarem em posicionados abaixo das rodas, os trilhos precisam resistir aos esforços aos quais são submetidos durante o movimento de translação da cabine (NASSAR). 3.2.3.2 Rodas de translação As rodas giram nas árvores e eixos, deslocando a cabine do Protótipo Plataforma Suspensa Rolante (PPSR) ao longo do trilho. Durante esse movimento de deslocamento, as rodas ficam sujeitas a esforços decorrentes do próprio peso da cabine da PSR e da carga de movimentação (pessoas e materiais). 20 O dimensionamento das rodas em (mm)é obtido pela equação (6), a qual considera a pressão de contato (Kf) em (N/mm²), a carga aplicada em uma roda (P r) em (N) obtida a partir da carga total e a largura de contato com o trilho (B) em (mm) (NASSAR). 𝑃 𝐷 = 𝐾 𝑟∙𝐵 (6) 𝑓 3.2.4 Estruturas 3.2.4.1 Vigas Viga é um elemento estrutural projetado para suportar carregamentos ao longo do seu comprimento. Assim, torna-se imprescindível para o projeto de vigas a análise das tensões de flexão e cisalhamento e o levantamento das forças de cisalhamento máximas (Vmáx) e dos momentos máximos (Mmáx) obtidos através dos diagramas da cortante (Q) e do momento (M). Nos diagramas da cortante e do momento fletor são representados os valores positivos e negativos ao longo de todo o comprimento da viga. Positivos quando estiverem abaixo do apoio e negativo quando estiver acima (MELCONIAN,2009) Para a construção do diagrama é necessário definir as forças externas e das reações e o momento gerado pelas mesmas. Assim, supondo que uma viga biapoiada recebe dois carregamentos pontuais em sua região central, conforme apresentado na Figura 5, as reações dos apoios podem ser obtidas através do equilíbrio estático das forças na direção vertical (eixo y) e dos momentos em relação a um apoio da estrutura. L l Figura 5 - Viga bi apoiada com carga pontual na região central. 21 Um sistema é dito em equilíbrio estático quando a resultante de suas forças é nula, ao seja, os somatórios de todas as forças e de todos os momentos são iguais à zero. Tomando Ay e By como a reações dos apoios na direção y é possível determinar seus valores através do equilíbrio estático descrito através das equações (7) a (10). ∑ 𝐹𝑦 = 0 (7) 𝐴𝑦 + 𝐵𝑦 − 𝑃1 − 𝑃2 = 0 ∴ 𝐴𝑦 + 𝐵𝑦 = 𝑃1 + 𝑃2 (8) ∑ 𝑀𝐴 = 0 (9) 𝐿 𝑙 𝐿 𝑙 𝐿 𝑙 𝐿 𝑙 −𝑃1 ∙ (2 − 2) − 𝑃2 ∙ (2 + 2) + 𝐵𝑦 ∙ 𝐿 = 0 ∴ 𝐵𝑦 = 𝑃1 ∙ (2 − 2) + 𝑃2 ∙ (2 + 2) (10) Após definição das reações é possível obter os esforços cortantes e momentos fletor em função do comprimento da viga através do método das seções. Aplicando o método para a viga apresentada na Figura 5, tem-se a seção 1 entre o apoio A e a primeira força concentrada P, conforme mostra a Figura 6. M x V Figura 6 - Seção 1 da viga bi apoiada. Analisando o equilíbrio estático da Figura 6, através das equações (7) e (12) encontra-se a força cortante (V) atuante na seção 1, apresentada na equação (11), e o momento fletor (M) em função do comprimento da seção analisada, equação (13). ∑ 𝐹𝑦 = 0 (7) 𝐴𝑦 − 𝑉 = 0 ∴ 𝐴𝑦 = 𝑉 (11) ∑𝑀 = 0 (12) −𝐴𝑦 ∙ 𝑥 + 𝑀 = 0 ∴ 𝑀 = 𝐴𝑦 ∙ 𝑥 (13) Observe através da Figura 6 que o valor da distância analisada (x) na equação (13) está entre zero e metade do comprimento total da viga menos metade da distância entre as cargas externas, ou seja, 0 ≤ 𝑥 < (𝐿⁄2 − 𝑙⁄2). A primeira seção é suficiente para predizer o comportamento das forças cortantes e dos momentos atuantes apenas do comprimento 0 ≤ 𝑥 < (𝐿⁄2 − 𝑙⁄2) da viga, necessitando, portanto, de mais duas seções. Assim, a segunda seção ocorre entre as duas cargas externas, sendo representada na Figura 7. 22 M x V Figura 7 - Seção 2 da viga bi apoiada. Na seção 2, o trecho da viga analisado está entre(𝐿⁄2 − 𝑙⁄2) ≤ 𝑥 ≤ (𝐿⁄2 + 𝑙⁄2). Se o equilíbrio estático for novamente aplicado, equações (7) e (12), observase uma nova relação entre a reação (Ay), a força externa (P1), a força cortante (V) e o momento fletor (M), conforme demonstrada nas equações (14) e (15). ∑ 𝐹𝑦 = 0 (7) 𝐴𝑦 − 𝑃1 − 𝑉 = 0 ∴ 𝐴𝑦 − 𝑃1 = 𝑉 (14) ∑𝑀 = 0 (12) −𝐴𝑦 ∙ 𝑥 + 𝑃1 ∙ [𝑥 − (𝐿⁄2 − 𝑙⁄2)] + 𝑀 = 0 ∴ 𝑀 = 𝐴𝑦 ∙ 𝑥 − 𝑃1 ∙ [𝑥 − (𝐿⁄2 − 𝑙⁄2)] (15) Por fim, a seção 3 compreende no trecho entre (𝐿⁄2 + 𝑙⁄2) < 𝑥 ≤ 𝐿, em que a força cortante (V) e o momento fletor (M) ao longo do comprimento analisado são descritos através das equações (16) e (17). ∑ 𝐹𝑦 = 0 (7) 𝐴𝑦 − 𝑃1 − 𝑃2 − 𝑉 = 0 ∴ 𝐴𝑦 − 𝑃1 − 𝑃2 = 𝑉 (16) ∑𝑀 = 0 (12) −𝐴𝑦 ∙ 𝑥 + 𝑃1 ∙ [𝑥 − (𝐿⁄2 − 𝑙⁄2)] + 𝑃2 ∙ [𝑥 − (𝐿⁄2 + 𝑙⁄2)] + 𝑀 = 0 ∴ 𝑀 = 𝐴𝑦 ∙ 𝑥 − 𝑃1 ∙ [𝑥 − (𝐿⁄2 − 𝑙⁄2)] + 𝑃2 ∙ [𝑥 − (𝐿 ⁄2 + 𝑙⁄2)] (17) Os diagramas da cortante e do momento fletor são obtidos através das equações (11), (13), (14), (15), (16) e (17) e demonstrados nas Figuras 8 e 9. V x Figura 8 - Diagrama da cortante da viga bi apoiada. 23 M x Figura 9 - Diagrama do momento fletor da viga bi apoiada. Através dos diagramas da cortante e do momento fletor é possível obter os valores máximos necessários para determinar a tensão normal máxima e a tensão de cisalhamento máxima de flexão da viga. Para os cálculos dessas tensões devese considerar a distância do ponto mais externo da viga até o meio da mesma (onde está a linha elástica), a força cortante, o momento fletor, a largura e o momento de inércia da seção transversal da viga. As relações entre essas variáveis são descritas nas equações (18) e (19), conforme se segue (MELCONIAN,2009): 𝜎= 𝑀∙𝑐 𝜏= 𝑉∙𝑄 (18) 𝐽 (19) 𝐽∙𝑏 Na equação (18), “σ” é a tensão normal de flexão, “c” a distância da linha elástica (representada na Figura 10) até a superfície externa da viga e “J” o c momento de inércia da seção transversal. Linha elástica b Figura 10 - Perfil da viga caixão com a linha elástica. Na equação (19), 𝜏 é a tensão de cisalhamento, Q é o momento estático da região acima da linha elástica, J o momento de inércia e b a largura da viga. 24 4. MATERIAIS E MÉTODOS 4.1 Materiais Os materiais utilizados no protótipo da Plataforma Suspensa Rolante (PSR) são listados a seguir, de acordo com a sua ordem de montagem. a) Estrutura da plataforma: Para a construção da base e estrutura da plataforma e estrutura do plenum foram utilizados: Uma (1) Chapa de ferro (metalon): 500 (mm) de comprimento, 700 (mm) de largura e 20 (mm) de espessura. Quatro (4) tubos de ferro (metalon) - colunas de sustentação da plataforma: seção transversal de 20x20 (mm) e comprimento de 700 (mm). Um (1) tubo de ferro (metalon) – coluna de sustentação do motor: seção transversal de 20x20 (mm) e comprimento de 700 (mm). Dois (2) tubos de ferro (metalon) – proteção da plataforma/ sentido transversal: seção transversal de 20x20 (mm) e comprimento de 660 (mm). Quatro (4) tubos de ferro (metalon) – proteção da plataforma/ sentido longitudinal: seção transversal de 20x20 (mm) e comprimento de 400 (mm). Duas (2) chapas para suporte dos mancais: 150 (mm) comprimento, 80 (mm) de largura e 5 (mm) espessura. Quatro (4) parafusos sextavados com porca. Duas (2) barras para estrutura do plenum: seção transversal de 40x40 (mm) e comprimento de 2000 (mm). Quatro (4) barras para coluna do plenum: seção transversal de 40 x40 (mm) e comprimento de 1000 (mm). Duas (2) barras para conexão da estrutura do plenum: seção transversal de lado de 40x40(mm) e comprimento de 900 (mm). Duas (2) cantoneiras com 2000 (mm) de comprimento e 15 (mm) de espessura. 25 b) Equipamentos de movimentação: Para movimentação do sistema foram utilizadas: Duas (2) roldanas – eixo traseiro: diâmetro externo de 50 (mm)e diâmetro interno de 20 (mm). Duas (2) roldanas – eixo dianteiro: diâmetro externo de 50 (mm)e diâmetro interno de 10 (mm). Dois (2) pinos com diâmetro de 10 (mm). Um (1) eixo - traseiro: diâmetro de 20 (mm) e comprimento de 700(mm). Dois (2) mancais: diâmetro interno de 50 (mm). Dois (2) rolamentos: diâmetro externo de 50 (mm) e diâmetro interno de 20 (mm). c) Transmissão de potência: Para a motorização e sistema de transmissão de potência foram utilizados: Um (1) motor monofásico – especificação: Weg E48 T /391, com ¼ cv de potência, rotação de 1725rpm e frequência de 60 Hz de 220 (V). Uma (1) polia: diâmetro externo de 170(mm) e com diâmetro interno de 20(mm). Uma (1) polia: diâmetro externo de 80(mm) e com diâmetro interno 12(mm). Uma correia trapezoidal – V com espessura de 10 (mm). 4.2 Métodos A montagem do PPSR foi dividida em três partes denominadas de A,B e C. Onde a parte A consiste na estrutura da plataforma, B estrutura de sustentação e movimentação e C consiste em estrutura e componentes de transmissão de força. 26 a) Construção da estrutura da plataforma: Para a estrutura soldou-se quatro (4)barras de700 mm nas extremidades da chapa com respectivas dimensões 700x500 mm e 15 mm de espessura. Em seguida fixou-se três (3) barras transversais, nas laterais e na parte de trás ,todas elas na parte superior Fixaram-se mais três (3) barras transversais para a proteção do operador, com distanciamento de 350 mm das barras superiores. Esta foi a montagem da estrutura da cabine como mostra a Figura 11 a seguir ,sem a chapa. Figura 11-Estrutura da plataforma b) Construção do mecanismo de translação e sustentação da plataforma; Denominamos como B a estrutura do trilho aonde nossa plataforma se locomoverá. A montagem do trilho consiste em fixar duas(2) barras de 900 mm nas extremidades da barra de 2000 mm . Fixou-se uma segunda barra de 2000 mm na estrutura já montada assim formando um retângulo. Para o apoio da estrutura do trilho foi fixado quatro (4) barras de 1000 mm em suas extremidades. Em seguida soldaram-se as cantoneiras nas duas 27 (2) barras de 2000 mm assim formando a estrutura para a locomoção da plataforma Figura 12. Figura 12-mecanismo de translação e sustentação da plataforma c) Estrutura e os componentes da transmissão de força A estrutura e os componentes de transmissão de força foi utilizada uma barra de 350 mm fixada através de solda na para suporte do motor que foi fixado nas barras de proteção através de solda, motor foi fixado através de quatro (4) parafusos. Dois (2) na barra que foi utilizada como proteção e dois na barra de suporte. Em seguida Foram fixadas na parte frontal duas chapas de 150x80 mm com 5 mm de espessura para ser utilizada como o suporte dos dois mancais de rolamento que por sua vez foram fixados através de 4 parafusos sextavados, dois para cada mancal de rolamento. Em uma barra com 20 de diâmetro e 700 mm de comprimento acoplou-se a polia de diâmetro externo de 170 mm que é denominada como polia movida. Essa barra foi encaixada nos mancais de rolamento assim tornando-se o eixo arvore do protótipo. Nas extremidades do eixo arvore foram fixadas duas roldanas com diâmetro interno de 20 mm através de parafusos allien. Em seguida no motor foi fixado através de solda a polia com diâmetro externo de 80 mm que é denominada como polia motora. através de dois pinos um 28 em cada lateral foram fixadas duas roldanas com diâmetro interno de 10 mm para dar apoio na sustentação e movimentação da estrutura da plataforma. Na polia motora e polia movida foi encaixado uma correia trapezoidal dentada V. Como mostra Figura 13. Figura 13 Estrutura e os componentes da transmissão de força E por fim de todo o processo estabeleceu-se a união das duas estruturas Figura 14 Figura 14-Protótipo Plataforma Suspensa Rolante 29 A Tabela 1 apresenta-se os resultados obtidos no dimensionamento do protótipo plataforma suspensa rolante (PPSR). Tabela 1 - Dimensionamento da estrutura – vigas. Resultados Fórmulas Forças𝑅𝐴 + 𝑅𝐵 = 0 196N Força cortante Q diagrama 98N Momento Máximo𝑀𝑚𝑎𝑥 = 𝜎= 𝑄×𝐿2 𝑀𝑚𝑎𝑥 = 49𝑁/𝑚 8 𝑀 𝐽 𝐽 = 0,23. 10−6 𝑚4 𝑎4 𝑎 ≅ 41. 10−3 𝑚𝑜𝑢 41 𝑚𝑚 Área da secção quadrada𝐽 = 12 A Tabela 2 apresenta resumidamente os resultados dos cálculos para construção do mecanismo de translação da plataforma. Tabela 2 - Dimensionamento dos equipamentos de movimentação. Resultados Formulas Motorização e Potencia Potencia 𝑃 = 𝑊 𝑡 = 𝐹∙𝑑 184Cv 𝑡 1 Frequência 𝑓 = 𝑡 𝑓 ≅ 60𝐻𝑧 Relação e transmissão 𝑑 Polias 𝑖 = 𝑑 𝑚𝑎𝑖𝑜𝑟 = 𝑚𝑒𝑛𝑜𝑟 𝑛𝑚𝑒𝑛𝑜𝑟 𝑖 ≅ 2,5 𝑛𝑚𝑎𝑖𝑜𝑟 Comprimento da correia 𝑙 = 2𝐶 + 1,57(𝑑𝑚𝑎𝑖𝑜𝑟 + 𝑑𝑚𝑒𝑛𝑜𝑟 ) 𝑙 ≅ 1000𝑚𝑚 (𝑑𝑚𝑎𝑖𝑜𝑟 − 𝑑𝑚𝑒𝑛𝑜𝑟 )2 + 4𝐶 Trilhos e Rodas 𝑃 Diâmetro da roda𝐷 = 𝐾 𝑟∙𝐵 𝑓 𝐷 ≅ 0,01𝑚𝑚 30 5. CONCLUSÕES Neste trabalho foi apresentado o princípio de máquinas de elevação e transporte, sua relação com o protótipo de Plataforma Suspensa Rolante (PPSR) proposto e os elementos constituintes desse equipamento. Através dos fundamentos apresentados foi possível desenvolver um protótipo de Plataforma Suspensa Rolante (PPSR) que viabiliza a diminuição dos esforços físicos dos trabalhadores, aumentando a agilidade e o rendimento dos serviços de limpeza de plenum de cabines. No dimensionamento dos elementos do protótipo utilizaram-se os princípios de projeto e os cálculos de cargas máximas de pontes rolantes, embora na escolha do material deu-se prioridade aos de menor custo. Através da estimativa do peso total da estrutura foi possível determinar a potência, frequência e rotação necessárias para a escolha da motorização do Protótipo da Plataforma Suspensa Rolante. 31 6. SUGESTÕES PARA TRABALHOS FUTUROS O presente trabalho consistiu em um desafio para os autores, exigindo a busca por conceitos além dos apresentados ao longo do curso de Técnico em Mecânica. Entende-se por tais conceitos a própria definição de máquinas de elevação e transporte, a relação de escala entre protótipo e modelo, cálculo de estabilidade e balanceamento de estruturas, sistema de amortecimento, redução e frenagem, potência nominal de motores elétricos e instalação da motorização. Assim, por se tratar de princípios mais avançados de engenharia propõe-se como sugestão para trabalhos futuros: a adequação do protótipo as condições locais de trabalho (relação de escala), a utilização de softwares de análise em engenharia para o cálculo de estabilidade da estrutura, o aperfeiçoamento da motorização com redutores e freios e a adequação da Plataforma Suspensa Rolante as normas regulamentadoras e as normas técnicas vigentes. 32 REFERÊNCIAS ERNST, H. Aparatos de elevacion y transporte, Tomo I – Principios y elementos constructivos. 1ª Edição. Traducción de Julio Pinto. Barcelona: Blume, 1970. Capítulos 5, 8 e 11. GENEROSO, D. J. Elementos de máquinas. Araranguá: IFSP, 2009. (Apostila) LANGUI, C. A. Pontes rolantes – a importância do equipamento nas áreas de produção industrial. Trabalho de conclusão de curso (Especialização) – Departamento de Economia, Contabilidade, Administração e Secretariado, Universidade de Taubaté, Taubaté, 2001. MAIA, G. P. Prática da manutenção. Divinópolis: SENAI, 2006. (Apostila para o curso Técnico em Mecânica Industrial). MARTIN, M. E. S.; ROCHA, D. M.; BUSS, M. R. P. Estudo ergonômico e medição de esforços na movimentação de andaimes suspensos mecânicos. In: Encontro Nacional de Engenharia de Produção, 25, 2005, Porto Alegre. Anais... Porto Alegre: PUCRS, 2005. MELCONIAN, S. Mecânica técnica e resistência dos materiais. 18ª Edição. São Paulo: Érica, 2009. NASSAR, W. R. Máquinas de elevação e transportes. Santos: ano desconhecido. (Apostila). PAULI, E. A.;ULIANA, F. S. Noções Básicas de Elementos de Máquinas – Mecânica. Vitória: SENAI, 1996. (Apostila do CPM - Programa de Certificação de Pessoal de Manutenção) RUDENKO, N. Máquinas de elevação e transporte. Traduzido por João Plaza. Rio de Janeiro: Livros técnicos e científicos editora S.A., 1976. 33 SAURIN, T. A.; ANDRADE, F. R.; GUIMARÃES, L. B. M.; COSTA, F. N. Diagnóstico ergonômico da movimentação de andaimes suspensos mecânicos. Porto Alegre: Ambiente Construído, v. 5, n. 1, p. 7-21, jan./mar. 2005. ISSN 1415-8876. SHIGLEY, J. E. Elementos de máquinas – Vol. 2. Traduzido por Edival Ponciano de Carvalho. Rio de Janeiro: Livros técnicos e científicos editora S.A., 1984. SOARES, J. O. Projecto e optimização de pontes rolantes. 2011. Dissertação (Mestrado Integrado em Engenharia Mecânica) – Escola de Engenharia, Universidade do Minho, Minho, 2011.
Baixar