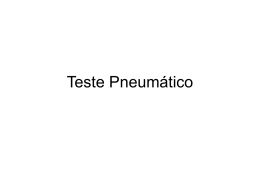
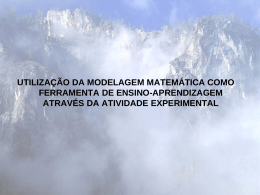
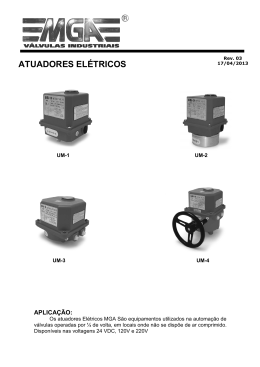
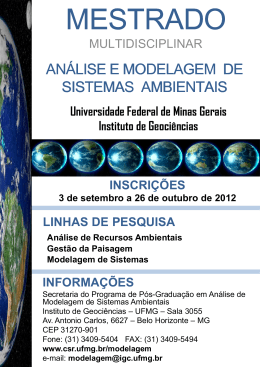
ISSN 1984-8218 Estudo da Modelagem Matemática da Vazão Mássica de uma Servoválvula Pneumática de Controle Direcional Rozimerli R. M. Richter* Camila Valandro Zamberlan Depto de Ciências Exatas e Engenharias, DCEEng, UNIJUÍ 98700-000, Ijuí, RS E-mail: [email protected]; [email protected] Antonio C. Valdiero Luiz A. Rasia Depto de Ciências Exatas e Engenharias, DCEEng, UNIJUÍ Campus Panambi 98280-000, Panambi, RS E-mail: [email protected]; [email protected] RESUMO Trata-se do estudo da modelagem matemática da vazão mássica nos orifícios de uma servoválvula pneumática utilizada em aplicações de controle preciso de atuadores pneumáticos. Os atuadores pneumáticos têm a vantagem de ter maior relação de potência por massa, quando comparados com os atuadores elétricos, e são mais limpos e sem risco de poluir o meio ambiente, quando comparados aos atuadores hidráulicos. Entretanto suas características não lineares dificultam o controle clássico e requerem uma adequada modelagem para fins de previsão de seu comportamento dinâmico e da utilização de estratégias de controle preciso. A metodologia utilizada neste estudo compõe-se da revisão bibliográfica em literatura científica recente [3, 4, 5], do estudo de dissertações anteriores [1, 2], e da sistematização do modelo matemático que representa as características não lineares das vazões nos orifícios da servoválvula. A Figura 1 apresenta o desenho esquemático de um atuador pneumático rotativo. O atuador pneumático rotativo é composto por uma servoválvula de controle direcional, um cilindro pneumático rotativo. Este atuador permite girar uma carga com um determinado ângulo correspondente a um ponto do curso do êmbolo do cilindro ou seguir uma trajetória variável em função do tempo. Figura 1 – Desenho esquemático de um atuador pneumático rotativo O deslocamento, xv , do carretel da servoválvula depende diretamente do sinal de controle, u, (sinal em tensão fornecido por um sistema de controle) que faz com que as bobinas dos solenoides da servoválvula sejam energizados. O carretel, ao ser deslocado, gera orifícios de * Bolsista Capes do Curso de Mestrado em Modelagem Matemática 1403 ISSN 1984-8218 passagem, fornecendo o ar comprimido para uma das câmaras do atuador e permitindo que o ar da outra escoe para a atmosfera. O ar ao entrar ou sair das câmaras do cilindro, produz variação nas pressões do ar nas câmaras do cilindro (pa e pb). A diferença de pressão entre as câmaras é responsável por uma força pneumática resultante que desloca a haste do cilindro e uma transmissão por cremalheira transforma o movimento num deslocamento angular no eixo de saída. As equações (1) e (2) descrevem o modelo matemático da vazão mássica nos orifícios a e b da servoválvula: qma (u , pa ) = g1 ( pa , sign(u ))arctg (2u ) qmb (u , pb ) = g 2 ( pb , sign(u ))arctg (2u ) (1) (2) onde g1 e g 2 são funções não lineares que dependem do sentido de abertura da servoválvula e, respectivamente, das pressões pa e pb nas câmaras A e B do atuador, tal como descrito e determinado experimentalmente por Endler [2]. A Figura 2 ilustra o comportamento da vazão mássica em um dos orifícios da servoválvula em função da diferença de pressão no orifício e do sinal de controle, obtido com este modelo matemático. Vazão mássica [kg/s] 0.01 0.005 0 -0.005 -0.01 0 2 5 4 x 10 6 -10 -5 0 5 10 Sinal u [Volts] Diferença de Pressão [Pa] Figura 2 – Representação gráfica da equação da vazão mássica em função da diferença de pressão e da tensão de controle em um dos orifícios da válvula pneumática Palavras-chave: Atuador Pneumático Rotativo, Servoválvula Direcional, Vazão Mássica. Referências [1] D. Bavaresco, “Modelagem matemática e controle de um atuador pneumático”, Dissertação de Mestrado, Mestrado em Modelagem Matemática-UNIJUÍ, 2007. [2] L. Endler, “Modelagem da Vazão Mássica de uma Servoválvula Pneumática e sua aplicação no Controle Ótimo de um Servoposicionador Pneumático”, Dissertação de Mestrado, Mestrado em Modelagem Matemática-UNIJUÍ, 2009. [3] A. Mehmood, S. Laghrouche, M. El Bagdouri, F. S. Ahmed, Sensitivity analysis of LuGre friction model for pneumatic actuator control, em “IEEE Vehicle Power and Propulsion Conference” (VPPC), pp. 1-6, 2010. [4] Q. Wei, J. Zongxia, Modeling and analysis of pneumatic loading system, em “Fluid Power and Mechatronics” (FPM), International Conference on, pp. 642-646, 2011. [5] A. C. Valdiero, C. S. Ritter, C. F. Rios, M. Rafikov, “NonLinear Mathematical Modeling in Pneumatic Servo Position Applications”, Mathematical Problems in Engineering (Online). , vol. 2011, pp.1 - 16, (2011). 1404
Baixar