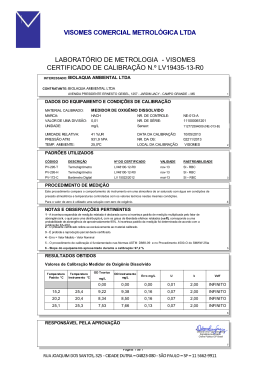
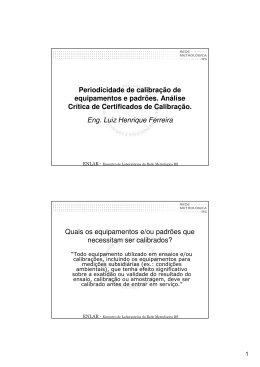
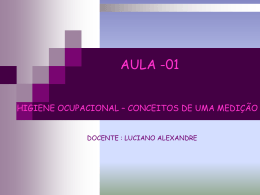
3. CALIBRAÇÃO DE TEMPO E FREQÜÊNCIA 3.1. Calibração de freqüência e rastreabilidade Neste capítulo, serão abordados a calibração de tempo e freqüência, os principais métodos de calibração e a rastreabilidade. O Sistema Internacional de Unidades (SI) estabelece que o período deve ser expresso sempre em unidades de segundos (s) e a freqüência deve ser PUC-Rio - Certificação Digital Nº 0611876/CA expressa em hertz (Hz). A freqüência de sinais elétricos é freqüentemente expressa em kilohertz (kHz) ou megahertz (MHz), onde 1 kHz é igual a mil (103) ciclos por segundo (= 1000 Hz) e 1 MHz é igual a um milhão (106) de ciclos por segundo (= 1000000 Hz). Em algumas áreas da Metrologia, uma parte por milhão (1x10-6 = 1 ppm) é uma quantização usual enquanto em tempo e freqüência medições de uma parte por bilhão (10-9) são rotina, bem como uma parte por trilhão (10-12). Dispositivos que geram freqüências bem conhecidas e exatas são chamados padrões de freqüência, descritos no capítulo 2.7 – Padrões Atômicos de TF e o Tempo Atômico e 2.8 – O Estado-da-Arte, e devem ser calibrados com um grau de incerteza que atenda às aplicações do usuário, atendendo assim o que estabelece o item 5.4.2 (Seleção de Métodos) da norma NBR ISO/IEC 17025:2005 (ABNT, 2005): “O laboratório deve utilizar métodos de ensaio e/ou calibração, incluindo os métodos para amostragem, que atendam às necessidades do cliente e que sejam apropriados para os ensaios e/ou calibrações que realiza” Calibrações de freqüência visam medir o desempenho em freqüência de qualquer dispositivo. periodicamente. Elas podem ser realizadas continuamente ou Calibração de Tempo e Freqüência 70 O dispositivo sob calibração pode ser um gerador de freqüência por si só ou um oscilador que seja parte de um outro equipamento como, por exemplo, uma base de tempo para um contador de freqüência ou um gerador de sinal. Na grande maioria, os laboratórios calibram somente seu melhor oscilador junto a um laboratório que tenha rastreabilidade nacional e depois calibram outros equipamentos de seu parque de instrumental ou distribuem, internamente, este sinal calibrado. Rastreabilidade: Propriedade do resultado de uma medição ou do valor de um padrão estar relacionado a referências estabelecidas, geralmente a padrões nacionais ou internacionais, através de uma cadeia contínua de comparações, todas tendo incertezas estabelecidas (item 6.10 do VIM). PUC-Rio - Certificação Digital Nº 0611876/CA Para realizarmos uma calibração de freqüência, o dispositivo sob calibração deve ser comparado a um Padrão de Referência. Padrão de Referência: Padrão, geralmente tendo a mais alta qualidade metrológica, disponível em um dado local ou em uma dada organização, a partir do qual as medições lá executadas são derivadas (item 6.6 do VIM). O padrão de referência deve superar o desempenho do dispositivo sob teste e, usualmente, utilizamos a relação chamada: Razão de Incerteza de Teste (TUR = Test Uncertainty Ratio) de 10:1 como preferencial. Isto quer dizer que o padrão de referência apresenta incerteza 10 vezes melhor que o dispositivo sob teste. Incerteza 10 vezes melhor significa ter uma incerteza 10 vezes menor. Isto nem sempre é possível. Mas, também é comum utilizar-se TUR 5:1, pois ainda garante que o padrão de referência pouco contribuirá para a incerteza total (incerteza combinada – vide capítulo 6). Uma vez realizada a calibração, o metrologista poderá estabelecer o grau de exatidão da freqüência gerada pelo dispositivo sob calibração em relação ao valor da sua freqüência nominal, no instante da calibração. Calibração de Tempo e Freqüência 71 Exatidão (Accuracy): a) Exatidão de Medição: Grau de concordância entre o resultado de uma medição e um valor verdadeiro do mensurando (item 3.15 do VIM). b) Exatidão de um Instrumento de Medição: Aptidão de um instrumento de medição para dar respostas próximas a um valor verdadeiro. Observação: Exatidão é um conceito qualitativo (item 5.18 do VIM). Para estabelecer-se o grau de exatidão da freqüência gerada pelo dispositivo sob calibração, em relação ao valor da sua freqüência nominal, no instante da calibração, mede-se a diferença da freqüência atual em relação à freqüência do Padrão de Referência. Esta diferença é o desvio de freqüência que a freqüência gerada pelo dispositivo sob calibração apresenta em relação PUC-Rio - Certificação Digital Nº 0611876/CA à freqüência do padrão de referência. Desvio: Valor menos seu valor de referência (item 3.11 do VIM). A probabilidade de que esta diferença esteja dentro de uma faixa de valores é dada pela incerteza de medição. Para garantir-se que a incerteza de medição supera os requisitos determinados pelas especificações do dispositivo sob calibração, utilizam-se equipamentos que estabeleçam uma TUR adequada e sistemas de medição que apresentem incerteza de medição compatível com as especificações do dispositivo sob calibração. Em outras palavras, corresponde a escolher adequadamente as Classes de Exatidão dos equipamentos e corresponden tes correlações adequadas de TUR: Classe de Exatidão: Classe de instrumentos de medição que satisfazem a certas exigências metrológicas destinadas a conservar os erros dentro de limites especificados (item 5.19 do VIM). Quando o valor da freqüência medida atende às especificações do dispositivo sob calibração, a calibração é bem sucedida. Caso contrário, a calibração é interrompida e o usuário deve ser comunicado. O Padrão de Referência deve ter rastreabilidade determinada ao padrão reconhecido internacionalmente. Calibração de Tempo e Freqüência No Brasil, a referência primária, na cadeia de 72 rastreabilidade de Tempo e Freqüência, está localizada no LPTF da Divisão Serviço da Hora do Observatório Nacional. Em algumas áreas da Metrologia, a rastreabilidade pode ser obtida enviando-se o padrão para o NMI para calibração ou enviando um conjunto de materiais de referência ao usuário. No caso de Tempo e Freqüência, estes dois métodos não são práticos pois os osciladores (componentes básicos dos geradores de freqüência) são sensíveis às condições ambientais e a vibrações mecânicas, além de não poderem ser desligados. Por estas razões, é aconselhado realizar-se as calibrações no próprio local de uso. Para realizar-se uma calibração de um equipamento no laboratório do cliente, utiliza-se de Padrões de Transferência a fim de fornecer uma PUC-Rio - Certificação Digital Nº 0611876/CA freqüência de referência do Padrão Nacional ao laboratório de calibração. Padrão de Transferência: Padrão utilizado como intermediário para comparar padrões. Observação: A expressão “dispositivo de transferência” deve ser utilizada quando o intermediário não é um padrão (item 6.8 do VIM). Embora se tenha dito que não é prático se deslocar fisicamente um oscilador para realização de uma calibração, sempre que for necessário deslocar-se um Padrão de Transferência desde o NMI até o laboratório do cliente, deve-se seguir a norma NBR ISO/IEC 17025:2005 (ABNT, 2005). Para isso, o Sistema da Qualidade do laboratório deve ter procedimentos documentados de forma a garantir que, antes de sair das instalações do NMI, o padrão e os equipamentos de medição que serão usados na calibração tenham seus status de calibração confirmados por meio de medições e as medidas obtidas sejam devidamente registradas. Deve-se evitar choques térmicos e mecânicos nos equipamentos durante seu transporte e, durante todo o tempo, as condições ambientais devem ser monitoradas e registradas. Tão logo o Padrão de Transferência e demais equipamentos retornem ao NMI, seus status devem ser comparados com os registrados quando de sua partida. Calibração de Tempo e Freqüência 73 Também se pode realizar calibração remota, sem necessidade de deslocamento físico, utilizando-se, por exemplo, sinais de radio-navegação como o GPS (Global Positioning System). A utilização de um sistema de calibração como este fornece um sinal de referência com rastreabilidade e nível de incerteza conhecidos e tem a grande vantagem de permitir calibrações simultâneas, em diferentes localidades que possuam receptor de satélite adequado, sem o inconveniente do deslocamento físico de padrões de freqüência. Evidentemente que o laboratório deve estabelecer um procedimento técnico para realização deste tipo de calibração a fim de descrever o Método de Calibração, conforme estabelece o item 5.4.1 da norma NBR ISO/IEC 17025:2005: “O laboratório deve utilizar métodos e procedimentos apropriados para PUC-Rio - Certificação Digital Nº 0611876/CA todos os ensaios e/ou calibrações dentro do seu escopo. Estes incluem amostragem, manuseio, transporte, armazenamento e preparação dos itens a serem ensaiados e/ou calibrados e, onde apropriado, uma estimativa da incerteza de medição, bem como as técnicas estatísticas para análise dos dados de ensaio e/ou calibração.” Bem como atender o estabelecido no item 5.4.2 ( Seleção de Métodos) da norma NBR ISO/IEC 17025:2005: “Quando o cliente não especificar o método a ser utilizado o laboratório deve selecionar métodos apropriados que tenham sido publicados em normas internacionais, regionais ou nacionais, por organizações técnicas respeitáveis, em textos ou jornais científicos relevantes ou especificados pelo fabricante do equipamento. Podem também ser usados métodos desenvolvidos ou adotados pelo laboratório, se forem apropriados para o uso e se estiverem validados.” Dois importantes parâmetros em uma calibração de freqüência são: deslocamento de freqüência (frequency offset ) estabilidade O deslocamento de freqüência (frequency offset) está associado à exatidão (accuracy) da freqüência e a estabilidade está associada à incerteza do valor da freqüência do oscilador ao longo de um período de tempo. Calibração de Tempo e Freqüência 74 A medição do deslocamento de freqüência não diz nada sobre a qualidade de um oscilador. A estabilidade de freqüência é que caracteriza bem se um oscilador é “confiável” quanto à sua função de gerar um determinado valor de freqüência ao longo do tempo. Ao realizar-se uma calibração de um dispositivo que gere um sinal com uma determinada freqüência (por exemplo: 5 MHz), o objetivo é identificar o desvio de freqüência e também explicitar a incerteza de medição. Em geral, a medição é realizada por comparação de fase entre o sinal gerado pelo dispositivo sob calibração e o sinal de referência. Há vários métodos para se realizar este tipo de calibração. Sabendo-se o desvio de fase ocorrido em um determinado intervalo de PUC-Rio - Certificação Digital Nº 0611876/CA tempo (período de medição ou intervalo de medição), determina-se o desvio de freqüência. O Desvio de Freqüência Relativo é igual a: ∆f f = − ∆t (3.1) T Sendo T o período de medição (intervalo de medição) e ∆t é o desvio de fase (em unidades de tempo) observado durante o período de medição T e ∆f é o desvio de freqüência correspondente e f é a freqüência de referência que, no caso, corresponde ao valor da freqüência nominal do dispositivo sob calibração. Por exemplo, se tivermos medido um desvio de fase de +1 µs (microssegundo) ocorrido no intervalo de medição de 24 h (horas), teremos, após converter as duas medidas para segundos, que: ∆t = +1 µs = 10-6 s T = 24 h = 86400 s Calibração de Tempo e Freqüência 75 Logo: ∆t T = 10 −6 s = 1,16x10− 11 (3.2) 86400s Assim, um oscilador que acumule um desvio de fase de 1 µs (microssegundo) por dia apresenta um desvio de freqüência relativo de 1,16x10-11 em relação à freqüência de referência. Sendo: ∆t = 1,16x10− 11 (3.3) PUC-Rio - Certificação Digital Nº 0611876/CA T A partir deste valor de desvio de freqüência relativo, podemos determinar o ∆f (desvio de freqüência) correspondente para a freqüência f que foi medida. Assim, por exemplo, para f = 5 MHz, tem-se: ∆f = 1,16x10-11 x (5000000) = 0,000058 Hz; ou seja, a freqüência medida é igual a 5000000,000058 Hz. A tabela 2 apresenta, como exemplo, uma lista de valores de desvio de freqüência relativo para alguns valores de desvio de fase e correspondentes períodos de medição (intervalo de medição): O valor do período de medição (T) deve ser avaliado e devidamente escolhido a fim de que possamos medir o desvio de fase (∆t) de modo que a configuração do sistema de medição e a freqüência de referência tenham o mínimo de influência sobre a incerteza de medição, em especial o ruído de fase que os osciladores apresentam. Calibração de Tempo e Freqüência 76 PUC-Rio - Certificação Digital Nº 0611876/CA Tabela 2 - Exemplos de desvio de freqüência Intervalo de Medição Desvio de Fase Desvio de Freqüência Relativo 1s 1 ms 1,00x10-3 1s 1 µs 1,00x10-6 1s 1 ns 1,00x10-9 1h 1 ms 2,78x10-7 1h 1 µs 2,78x10-10 1h 1 ns 2,78x10-13 1 dia 1 ms 1,16x10-8 1 dia 1 µs 1,16x10-11 1 dia 1 ns 1,16x10-14 3.2. Estabilidade Estabilidade: Aptidão de um instrumento de medição em conservar constantes suas características metrológicas ao longo do tempo. Quando a estabilidade for estabelecida em relação a uma outra grandeza que não o tempo, isto deve ser explicitamente mencionado. A estabilidade pode ser quantificada de várias maneiras, por exemplo: • pelo tempo no qual a característica metrológica varia de um valor determinado; ou • em termos da variação de uma característica em um determinado período de tempo (INMETRO, VIM, 2003). Estabilidade de freqüência de um oscilador caracteriza sua capacidade de gerar um mesmo valor de freqüência ao longo de um intervalo de tempo. A estabilidade não diz nada sobre a exatidão da freqüência, mas somente se seu valor permanece o mesmo (faixa de valores) ao longo do tempo. Calibração de Tempo e Freqüência 77 Um oscilador pode não estar exato em relação a sua freqüência nominal de funcionamento e, no entanto, apresentar boa estabilidade: manter o valor da freqüência gerada dentro de uma faixa estreita de valores. A figura 46 ilustra dois sinais, onde um apresenta freqüência estável e PUC-Rio - Certificação Digital Nº 0611876/CA outro apresenta freqüência instável (“estabilidade ruim”): Figura 46 - Estabilidade de freqüência A estabilidade de freqüência é caracterizada por uma estimativa estatística das variações de freqüência em um determinado intervalo de tempo. Estabilidade no Curto-Prazo (Short-Term stability) é, usualmente, associada à variações observadas em intervalos menores ou igual a 100 s e maiores ou igual a 1 s. Estabilidade no Longo-Prazo (Long-Term stability) é associada a variações observadas em intervalos maiores que 100 s e menores que 1 dia. Porém, se refere, usualmente, a períodos maiores que um dia ( ou dias), meses ou anos. Um oscilador apresenta, tipicamente, em suas especificações técnicas, suas característica de estabilidade para intervalos de tempo de 1, 10, 100 e 1000 s. Calibração de Tempo e Freqüência 78 As estimativas de estabilidade podem ser feitas no domínio da freqüência ou no domínio do tempo. Estimativas no domínio do tempo são mais usadas em virtude de se utilizar freqüentemente contadores de intervalo de tempo nas medições de freqüência. Para estimar a estabilidade, no domínio do tempo, deve-se realizar um conjunto de medições do desvio de freqüência em determinado intervalo de tempo e, posteriormente, calcular a dispersão destes valores. Quanto maior a dispersão, maior a instabilidade de freqüência do oscilador. O método de avaliação desta dispersão será abordado no Capítulo 6. A seguir, características de alguns tipos de osciladores, em especial, PUC-Rio - Certificação Digital Nº 0611876/CA quanto à estabilidade e desvio de freqüência. Osciladores a Quartzo apresentam variação da freqüência de ressonância com a temperatura. Em função do tipo de circuito utilizado para compensação de variações de freqüência com a temperatura, podemos definir três categorias de osciladores a quartzo: XO, TCXO e OCXO. Oscilador XO é o oscilador a quartzo que não possui nenhum circuito para compensação de variações de freqüência com a temperatura. Um típico circuito XO apresenta variação de ± 25 ppm para a faixa de – 55 oC a + 85 oC. No TCXO, um sensor de temperatura (um termistor) é utilizado para gerar uma tensão elétrica de correção que é aplicada a uma reatância variada por tensão (um varactor) no circuito do cristal de quartzo (figura 47). A variação da reatância compensa a variação intrínseca da freqüência do cristal de quartzo com a variação da temperatura. TCXOs analógicos conseguem melhorar o desempenho em até 20 vezes em relação a um XO, obtendo variação de ± 1 ppm para a faixa de – 55 oC a + 85 oC. Em um OCXO, o cristal de quartzo e outros componentes sensíveis à temperatura são mantidos dentro de uma câmara térmica (forno = oven) com temperatura controlada de forma a obter variação de freqüência próxima de zero com a variação da temperatura. OCXO conseguem melhorar o Calibração de Tempo e Freqüência 79 desempenho em até 1000 vezes ou mais em relação a um XO, obtendo variação de ± 5 x 10-9 para a faixa de – 55 oC a + 85 oC. Osciladores OCXO consomem mais energia, são maiores e custam mais PUC-Rio - Certificação Digital Nº 0611876/CA que TCXO. Figura 47 - Categorias de osciladores a quartzo baseadas na compensação de variação de freqüência com a temperatura (Ball-Efratom, 1993). Osciladores de Rubídio apresentam estabilidade no curto-prazo equivalente a de um quartzo, porém com uma estabilidade de longo-prazo muito melhor e mantendo-se dentro da tolerância com poucos ajustes. Osciladores de rubídio apresentam desvio de freqüência típico na faixa de 1 x 10 -10 a 5 x 10 -12 . A estabilidade típica é de 1 x 10 -12 por dia. Padrões de Césio apresentam desvio de freqüência típico menor que 5 x 10 -12 e estabilidade da ordem de partes em 10 14 por dia. O componente principal de um padrão de césio é o tubo de césio (também chamado Cesium Beam Tube – CBT) e com vida útil típica na faixa de 3 a 7 anos, dependendo do tipo de tubo e da corrente de feixe utilizada. Tendo em vista que o Calibração de Tempo e Freqüência 80 ressonador do padrão de césio é o tubo de césio, quando este começa a falhar, mesmo que o padrão de césio continue a fornecer uma freqüência de referência, esta freqüência passará a ter as características da base de tempo do padrão de césio que nada mais é que um oscilador a quartzo. Assim, os laboratórios que possuem padrões de césio têm que prever a compra de tubo de césio para reposição. Masers de Hidrogênio Ativos geram sua freqüência mais diretamente da ressonância atômica e, com isso, eles apresentam melhor estabilidade no curto-prazo que os Masers de Hidrogênio Passivos. Ambos os masers de hidrogênio têm melhor estabilidade no curto-prazo que os padrões de césio e de rubídio. Contudo, desde que o desempenho dos masers depende de um conjunto complexo de condições ambientais, em virtude de sua complexidade PUC-Rio - Certificação Digital Nº 0611876/CA estrutural e tamanho físicorestringindo seu uso a ambientes mais estáticos e controlados (Ball-Efratom, 1993). Tabela 3 - Características de diferentes tipos de osciladores Característica do Oscilador Quartzo Quartzo (TCXO) (OCXO) Rubídio Césio Maser de Hidrogênio Padrão Primário Não Não Não Sim Não Freqüência de Ressonância Mecânica (varia) Mecânica (varia) Atômica 6,834682608 GHz Atômica 9,19263177 GHz Atômica 1,42040575 GHz Envelhecimento por ano 5 x 10 5 x 10 5 x 10 nenhum ≈1 x 10 Tempo de Aquecimento (warm-up time) Desvio de Freqüência após Aquecimento < 10 s a -6 1 x 10 <5 minutos a -8 1 x 10 < 5 minutos a -10 1 x 10 < 30 minutos a -12 1 x 10 24 h a -12 1 x 10 5 x 10 1 x 10 a -10 1 x 10 1 x 10 a -12 1 x 10 1 x 10 a -14 1 x 10 1 x 10 a -13 1 x 10 Preço US$ 100 US$ 2000 US$ 3000 a US$ 8000 US$ 30.000 a US$ 80.000 US$ 200.000 a 300.000 -7 -6 -9 -8 -10 -10 -12 -13 -12 Calibração de Tempo e Freqüência 81 No capítulo 2.8, observou-se que o relógio atômico de césio do tipo fonte 1 possui exatidão e estabilidade melhores que o padrão de feixe de césio. Atualmente, o padrão primário de TF do NIST é um padrão de césio tipo fonte chamado NIST-F1 aproximadamente 1,7 x 10 –15 e apresenta incerteza de freqüência de ou exatidão de aproximadamente1 segundo em 20 milhões de anos. A figura 48 resume a evolução dos padrões de TF do NIST, cronologicamente, em relação à estabilidade e incerteza (Site NIST, 2006- PUC-Rio - Certificação Digital Nº 0611876/CA 2007). Figura 48 - Evolução dos padrões de freqüência do NIST A figura 49 apresenta a incerteza de diversos dispositivos de marcação de tempo versus períodos de observação (intervalos de medição). Em inglês: Cesium Fountain Atomic Clock; em francês: Horloge Atomique à Fontaine au Césium. 1 PUC-Rio - Certificação Digital Nº 0611876/CA Calibração de Tempo e Freqüência 82 Figura 49 - Estabilidade de dispositivos de marcação de tempo versus períodos de observação 3.3. Métodos de calibração de freqüência Há três métodos que são usualmente empregados nas medições de TF e descritos a seguir: a) Método do Contador de Intervalo de Tempo Neste método, as duas freqüências são divididas até obter-se, tipicamente, 1 PPS e mede-se, então, a diferença de tempo entre estes pulsos, com um contador de intervalo de tempo de alta resolução, apresentando resolução de até 12 dígitos para 1 segundo: Calibração de Tempo e Freqüência 83 Figura 50 - Diagrama de blocos do método do contador de intervalo de tempo b) Método Heterodino O método heterodino mistura as duas freqüências a ser comparadas e PUC-Rio - Certificação Digital Nº 0611876/CA mede-se o período da freqüência resultante (freqüência de batimento) da subtração destas duas freqüências. Figura 51 - Diagrama de blocos do método heterodino c) Método de Diferença de Tempo com Duplo Misturador (Dual Mixer Time Difference = DMTD) Este método utiliza um contador de intervalo de tempo para medir a diferença de fase entre dois sinais (com mesma freqüência nominal) através do batimento destes sinais com uma referência comum que apresenta um desvio em relação à freqüência nominal destes sinais (Offset Ref): Calibração de Tempo e Freqüência 84 Figura 52 - Diagrama de blocos do método de diferença de tempo com duplo misturador PUC-Rio - Certificação Digital Nº 0611876/CA Por exemplo, considere-se que o sinal de teste (fx) seja 5 MHz e a freqüência Offset Ref seja de 5 MHZ + 10 Hz. Caso o contador tenha base de tempo de 10 MHz (resolução de 100 ns), a resolução do sistema será de 0,2 ps. Este método é o melhor método para medições de sinais com mesma freqüência nominal. Além de possibilitar ótima resolução, a freqüência Offset Ref não precisa ser coerente, nem ter nenhum nível, particularmente baixo, de ruído ou de alta exatidão pois, em virtude dos batimentos utilizando duplo misturador, esses efeitos são cancelados no processo (Riley, 2002). 3.4. Calibração de tempo, padrões de transferência e os sistemas de satélites Antes de descrever o sistema GPS e sua utilização como padrão de transferência, deve-se ressaltar o grande problema que é a calibração e disseminação de tempo (data-hora). Isto por que se tem sempre que levar em consideração os retardos de tempo entre a saída da fonte de referência de tempo e a aplicação final. Em alguns casos de disseminação de tempo, estes retardos podem ser medidos ou avaliados. Em outros casos, estes retardos podem variar. Em aplicações com uso de computadores (hardware e software) os tempos internos de processamento podem ter influência considerável, assim Calibração de Tempo e Freqüência 85 como os meios de transmissão podem apresentar variações durante roteamentos dinâmicos entre dois pontos. Situações deste tipo podem resultar na alteração das características de dispersão dos dados envolvidos. 3.4.1. Sistema GPS O Sistema de Posicionamento Global GPS (Global Positioning System) é um sistema de rádio-navegação desenvolvido e operado pelo Departamento de Defesa dos Estados Unidos da América U.S. Department of Defense (DoD). Este sistema é formado por uma constelação de pelo menos 24 satélites, orbitando ao redor da Terra, a uma altitude de, aproximadamente, 20200 km, sendo 21 satélites primários e 3 reservas (NIST, Operator’s Manual - Appendix PUC-Rio - Certificação Digital Nº 0611876/CA A, 2006-2007). Cada satélite está equipado com seu próprio padrão atômico de freqüência (Padrão de Césio e/ou de Rubídio) que fica referenciado ao Observatório Naval dos Estados Unidos da América United States Naval Observatory (USNO) que, por sua vez, tem rastreabilidade ao National Institute of Standards and Technology (NIST). Os 24 satélites orbitam em seis planos fixos (quatro satélites em cada plano) inclinados de 55o do equador. Figura 53 - Constelação GPS Calibração de Tempo e Freqüência 86 Cada satélite tem um período orbital de 11 horas e 58 minutos, o que significa que cada satélite passa sobre um mesmo lugar sobre a Terra 4 minutos mais cedo a cada dia. Esta constelação assegura que todo ponto da superfície terrestre, em qualquer instante, esteja visualizado por pelo menos quatro satélites. Várias áreas da Terra são, por alguns momentos, visualizadas por até dez satélites. O projeto foi iniciado em 1973 pelo Departamento de Defesa dos Estados Unidos com o propósito de que aeronaves e navios militares pudessem determinar, em qualquer circunstância de tempo, sua posição exata. Outras necessidades que motivaram tal projeto foram a ajuda no lançamento de mísseis e a localização de tropas terrestres em movimento. O sistema NAVSTAR (abreviatura para Navigation Satellite Timing and PUC-Rio - Certificação Digital Nº 0611876/CA Ranging), nome oficial dado pelo Departamento de Defesa (DoD) dos Estados Unidos ao GPS, consiste de um segmento espacial (os satélites), um segmento de controle (as estações terrestres de gerenciamento) e um segmento do usuário. Todos os vinte e quatro satélites são controlados pelas estações terrestres de gerenciamento. Existe uma “estação master”, localizada no Colorado (Estados Unidos), que com o auxílio de cinco estações de gerenciamento espalhadas pelo planeta, monitoram o desempenho total do sistema, corrigindo as posições dos satélites e reprogramando o sistema com o padrão necessário. Após o processamento de todos esses dados, as correções e sinais de controle são transferidos de volta para os satélites (Dana, Peter H., 1997). Em 1995, o sistema GPS foi considerado como tendo alcançado sua capacidade operacional plena e, embora projetado inicialmente como sistema de navegação para uso militar dos Estados Unidos da América, sua aplicação expandiu enormemente para atividades de supervisão, navegação espacial, sistemas geodésicos de referência, monitoramento automático de veículos, mapeamento e inúmeras aplicações civis. A oficialização do uso civil do sistema GPS só veio em 1986, quando o Federal Radionavigation Plan (FRP) – (U. S. DoD) estabeleceu que o sistema GPS poderia ser utilizado por usuários civis, em todo o mundo, em regime Calibração de Tempo e Freqüência 87 permanente, porém com exatidão limitada, especificando dois tipos de serviço (militar e civil) e que são: i. Serviço de Posicionamento Padrão (SPS = Standard Positioning Service): nível especificado padrão de exatidão de posicionamento e tempo disponível sem restrições para qualquer usuário, em regime permanente. A exatidão deste serviço será sempre estabelecida pelo DoD e baseada nos interesses de segurança nacional dos Estados Unidos da América. Este serviço fornece uma exatidão de 100 m (95%), horizontalmente, e 156 m (95%), verticalmente, e exatidão de transferência de tempo do UTC de 340 ns (95%). Em relação a este serviço, para limitar a exatidão de velocidade, posição e tempo, o DoD estabeleceu PUC-Rio - Certificação Digital Nº 0611876/CA uma política de Disponibilidade Seletiva (SA = Selective Availability), implementada em 1990. Isto significa introduzir varáveis nos sinais transmitidos pelo GPS a fim de, intencionalmente, degradar seu desempenho, especialmente em situações de segurança nacional dos Estados Unidos da América; ii. Serviço de Posicionamento Preciso (PPS = Precise Positioning Service): o mais exato serviço de posicionamento direto, de informação de tempo e velocidade disponível mundialmente, em regime permanente. Este serviço é limitado a usuários autorizados especificamente pelos Estados Unidos da América. Equipamento militar passa a ter uma exatidão de 22 m (95%), horizontalmente, e 27,7 m (95%), verticalmente, e exatidão de transferência de tempo do UTC de 200 ns (95%) (Dana, Peter H., 1997); Em 01 de maio de 2000, o presidente Bill Clinton determinou o fim da disponibilidade seletiva (SA), liberando um mesmo nível de exatidão do sistema GPS para utilização civil (ANEXO H). A difusão de sinais dos satélites GPS ocorre em duas freqüências: Calibração de Tempo e Freqüência 88 L1 em 1575,42 MHz e L2 em 1227,6 MHz. Tanto em L1 quanto em L2, é transmitido um sinal spread-spectrum (espectro espalhado) do tipo pseudorandom noise (PRN – ruído pseudo-randômico) e cada satélite é identificado pelo código PRN que transmite. Existem dois tipos de código PRN: i. o primeiro é um “código de aquisição grosseira” (Coarse Acquisition Code – C/A) com chip rate de 1023 chips por milissegundo. ii. o segundo é um “código preciso” (P) com chip rate de 10230 chips por milissegundo. O C/A é transmitido em L1 e o código P é transmitido tanto em L1 quanto em L2. O código C/A se repete a cada milissegundo. O código P se repete PUC-Rio - Certificação Digital Nº 0611876/CA somente a cada 267 dias. A recepção GPS é dita line-of-sight, ou seja, a antena deve ter uma visada direta e clara do céu. Com esta visada direta, os sinais dos satélites podem ser recebidos em qualquer local da Terra. Cada satélite carrega um oscilador de rubídio ou césio, ou uma combinação de ambos. Estes osciladores fornecem a referência para as portadoras L1 e L2 e para o código. Eles são controlados por estações terrestres e referenciados ao tempo universal coordenado (UTC) através do USNO (NIST, Operator’s Manual - Appendix A, 2006-2007). Para a utilização destes satélites, basta que a antena seja montada em uma área aberta e com visada clara para o céu e depois conectada ao receptor. Esta antena costuma ser um disco ou cone com 15 cm de diâmetro. Ao ligar-se o receptor, ele realiza uma busca para identificar quais satélites estão visíveis a partir da antena. Então, assim que quatro satélites estão visíveis, o receptor calcula a coordenada tridimensional (latitude, longitude e altitude) da antena e começa a gerar um sinal de 1 PPS (1 Pulso Por Segundo). Alguns também fornecem saídas com freqüências padrões de 1, 5 ou 10 MHz. A coordenada tridimensional da antena é baseada em um sistema cartesiano geocêntrico (X,Y,Z centrado no centro da Terra), baseado no sistema WGS-84 (World Geodetic System – 1984) e que pode ser Calibração de Tempo e Freqüência 89 convertido para coordenadas geodésicas de latitude, longitude e altura acima da elipsóide de referência. O mais simples dos satélites tem apenas um canal (monocanal) e rastreia vários canais usando um esquema seqüencial, no qual vai chaveando rapidamente de um satélite para outro. Receptores mais sofisticados podem rastrear vários satélites simultaneamente (receptor multicanal). Em geral, tais receptores têm a capacidade de rastreio entre 5 a 12 satélites simultaneamente, embora somente em ocasiões raras se consiga visibilidade de mais de 8 satélites. Fazendo uma média dos dados de vários satélites, o receptor pode reduzir a incerteza da medição. O sistema GPS tem várias vantagens sobre os sinais de rádio LF (Low PUC-Rio - Certificação Digital Nº 0611876/CA Frequency): é de fácil recepção, equipamento não muito caro e com cobertura mundial e desempenho melhor. Porém, um receptor GPS não apresenta boa estabilidade no curto-prazo, aumentando o tempo requerido para calibração de padrões atômicos de freqüência. A figura 54 ilustra uma comparação entre o GPS e um oscilador de césio com intervalo de medição de 100 s. O oscilador de césio tem uma incerteza de freqüência de 1 x 10-13 . As variações de fase apresentadas são devidas fundamentalmente às variações do GPS (NIST, Operator’s Manual - Appendix A, 2006-2007). Figura 54 - Oscilador de césio x GPS (intervalo de 100 s) Calibração de Tempo e Freqüência 90 A figura 55 ilustra este mesmo oscilador de césio versus GPS, em um intervalo de medição de uma semana, onde podemos observar, além das variações de fase no curto-prazo, a contribuição do pequeno desvio de freqüência do césio (<1x10-13), indicada pela reta determinada através dos PUC-Rio - Certificação Digital Nº 0611876/CA mínimos quadrados (NIST, Operator’s Manual - Appendix A, 2006-2007). Figura 55 - Oscilador de césio x GPS (intervalo de 1 semana) 3.4.2. Sistema GLONASS e GALILEO O sistema GLONASS (Global Navigation Satellite System) é um sistema composto de uma constelação de satélites análogo ao sistema GPS. O GLONASS é gerenciado pela Forças Espaciais Russas (Russian Space Forces) para o Governo da Federação Russa (Russian Federation Government) e é operado pelo Centro de Informação e Coordenação Científica (KNIT) do Ministério de Defesa da Federação Russa. O segmento espacial do GLONASS consiste de 21 satélites em três planos orbitais e três satélites reserva. Estes três planos orbitais estão separados por 120o e os satélites de um mesmo plano orbital, por 45o. A altitude é de, aproximadamente, 19100 km e os planos orbitais têm inclinação de 64,8o com período orbital de 11 horas e 15 minutos. O primeiro dos satélites GLONASS foi lançado em 1982. O sistema foi declarado plenamente operacional em 1993 (site GLONASS). Calibração de Tempo e Freqüência 91 O GALILEO (European Satellite Navigation System) é uma iniciativa da União Européia e Agência Espacial Européia. A União Européia, representada pela Comissão Européia, é responsável pela dimensão política do sistema GALILEO e pela definição dos objetivos (site GALILEO). A Agência Espacial Européia é responsável pela definição técnica, desenvolvimento e validação do projeto GALILEO (site ESA). GALILEO será o sistema de navegação global por satélite da Europa, fornecendo serviço de posicionamento global de alta exatidão e sob controle civil. Terá interoperabilidade com os sistemas GLONASS e GPS. GALILEO é baseado em uma constelação de 30 satélites orbitando a PUC-Rio - Certificação Digital Nº 0611876/CA Terra a uma altitude de 24000 km. 3.5. Métodos de transferência por satélites Neste capítulo, serão abordados três diferentes métodos de transferência por satélites: método CV, método TWSTFT e método All-in-view. 3.5.1. Método Visada Comum A transferência de tempo por visada comum (Common View Time Transfer) ou método CV foi desenvolvida por pesquisadores do NIST. Esta abordagem melhora a técnica one-way (sentido único: neste caso somente recepção). Ela permite uma comparação direta de dois relógios (osciladores) em localizações remotas. O princípio de funcionamento, utilizando-se o sistema de satélite GPS, que está ilustrado pela figura 56 é o seguinte: PUC-Rio - Certificação Digital Nº 0611876/CA Calibração de Tempo e Freqüência 92 Figura 56 - Método CV (Common View) Duas estações A e B recebem um sinal one-way simultaneamente de um transmissor no satélite e mede a diferença de tempo entre o relógio do satélite (sinal recebido) e seu próprio relógio local. Os dados são trocados entre as estações A e B. A diferença de tempo entre os relógios A (clock A) e B (clock B) é calculada: [A – GPS- dSA] – [B – GPS – dSB] = A – B –(dSA – dSB) (3.4) Caso o tempo de transmissão dSA seja igual ao dSB então os dois locais A e B podem sincronizar seus relógios com uma exatidão que independe das características do transmissor e do meio de transmissão. Flutuações nos retardos entre o transmissor e os dois satélites se cancelam se elas são correlacionadas. Na prática, esta situação ideal não se verifica, mas o método funciona bem considerando que a distância entre os locais receptores seja pequena em relação à distância entre cada receptor e o satélite; o que é aceitável se lembrarmos que a altitude dos satélites é Calibração de Tempo e Freqüência 93 aproximadamente 20200 km. Uma desvantagem na técnica CV é que se faz necessário dispor de um meio de troca das informações entre os dois receptores e que, essencialmente, as observações sejam feitas sobre o mesmo satélite ao mesmo tempo. Esta técnica de GPS common-view (CV) tem sido usada pelo BIPM como uma das principais técnicas para comparações de tempo internacionais e é abordada no capítulo 4. O BIPM publica uma programação de rastreio (tracking schedule) de forma que diferentes estações possam realizar observações simultâneas referentes a um mesmo satélite. PUC-Rio - Certificação Digital Nº 0611876/CA 3.5.2. Método TWSTFT O método TWSTFT (Two-Way Satellite Time and Frequency Transfer ) utiliza satélites geo-estacionários comerciais para transferência de TF. Figura 57 - Método TWSTFT Esta técnica é considerada ativa, quando comparada com o uso do sistema GPS CV, pois os sinais de tempo são transmitidos e recebidos pelos dois laboratórios envolvidos, diferentemente do one-way do CV (somente recepção). O método TWSTFT oferece exatidão maior que o GPS CV, porém Calibração de Tempo e Freqüência 94 exige uma maior infra-estrutura. Ë utilizado principalmente pelos laboratórios primários de TF para inter-comparações de escalas de tempo atômico. O BIPM também utiliza esta técnica para cálculo das escalas internacionais de tempo atômico TAI e UTC. O primeiro experimento de TWSTFT foi realizado em 1962 entre o NPL e o USNO, usando o satélite de comunicação Telstar. A exatidão obtida foi de 20 µs e, atualmente, obtém-se exatidão melhor que 1 ns (site NPL). 3.5.3. Método All-in-View A organização IGS (International GPS Service ) fornece dados sobre o desvio de relógios e órbitas precisas dos satélites GPS e GLONASS. Esta nova PUC-Rio - Certificação Digital Nº 0611876/CA base de dados influenciou diretamente os métodos de transferência de TF. Com o serviço IGS, os desvios de relógios das estações receptoras podem ser comparados através de um satélite arbitrário ao invés de um satélite comum. Este método é chamado All-in-View Time Transfer ou GPS All-in-View = GPS AV (Weiss M. A., Petit G., Jiang Z., 2005).
Download