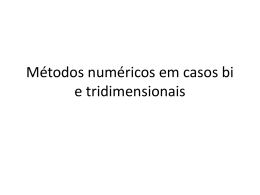
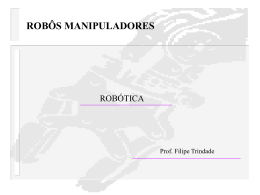
2 2 2 L1( ,H 11) 1 T H 12 U2 H133 h1111 h1222 h1333 (h112 h121 )12 (h113 h131 )13 (h123 h132 )23 G1 2 H 211 H 222 H 233 h21112 h22222 h23332 (h212 h221 )12 (h213 h231 )13 (h223 h232 )23 G2 3 H311 H322 H333 h31112 h32222 h33332 (h312 h321 )12 (h313 h331 )13 (h323 h332 )23 G3 Introdução Simulação da Dinâmica e Controle de um Manipulador Plano de Três Graus de Liberdade manipuladores robóticos são cada vez mais empregados em ambientes industriais e científicos manipuladores de 3 graus de liberdade (GL) são necessários para posicionar e orientar um objeto em um plano, no entanto somente equações de 2 GL estão desenvolvidas na literatura Priscilla Oliveira de Almeida Orientador: Marco Antonio Meggiolaro o objetivo deste trabalho é obter e Depto. de Engenharia Mecânica PUC-Rio Julho 2004 simular as equações da dinâmica de um robô de 3 GL, e implementar controles lineares e não-lineares de trajetória Simulação Manipulador de 2 Graus de Liberdade Formulação de Lagrange: obtém a dinâmica do sistema a partir das energias cinética e potencial (T e U): L(i , i ) T U d L L Q i e as equações resultam em: dt i i 2 1 H111 H122 h2 2h12 G1 2 2 H 222 H121 h1 G 2 vertical, L1=1,5 e L2 = 1,0, iniciais 1 = 2 = 0 2 l1 2 2 2 H11 m1l c1 I1 m 2l1 m 2l c2 2m 2l1l c2 cos 2 I 2 2 2 H 22 m 2l c2 I 2 H12 m 2l c2 m 2l1l c2 cos 2 I 2 1 G1 m1lc1g cos 1 m2g[lc2 cos(1 2 ) l1 cos 1 ] G 2 m2gl c2 cos(1 2 ) trajetória sem controle (1 = 2 = 0), plano (xe ,ye) 2 l2 Adept Three base h m2l1l c2 sin 2 1 Manipulador de 3 Graus de Liberdade o procedimento acima foi repetido para a obtenção das equações da dinâmica para um manipulador de 3 GL: 2 2 2 1 H111 H122 H133 h1111 h1222 h1333 (h112 h121 )12 (h113 h131 )13 (h123 h132 )23 G1 2 2 2 2 H 211 H 222 H 233 h 2111 h 2222 h 2333 (h 212 h 221 )12 (h 213 h 231 )13 (h 223 h 232 )23 G 2 2 2 2 H H H h h h (h h ) (h h ) (h h ) G 3 31 1 32 2 33 3 311 1 322 2 333 3 312 321 1 2 313 331 1 3 323 332 2 3 Controle PID e de Controle de Torque Computado (CTC) para controlar a trajetória do robô são aplicados torques i nas juntas, que no controle PID são definidos por t i : u i K pi (i des i ) K Ii (i des i ) dT K di (i des i ) 0 em sistemas com efeitos dinâmicos significativos é fundamental utilizar um controle não-linear como o CTC: i : j H ij u j j h ijk jk G i k Resultados - Simulações os controles PID e CTC são implementados para um manipulador de 3 GL percorrer uma trajetória circular em uma frequência 0,2Hz os ganhos de ambos os controladores foram ajustados de forma similar Conclusões foram obtidas as equações da dinâmica de um robô de 3 graus de liberdade o controle PID não é apropriado para compensar os efeitos dinâmicos de manipuladores, a menos que sejam usados altos ganhos não-realísticos o controle não-linear de torque computado é adequado quando se conhece as propriedades dinâmicas dos elos do manipulador 3
Download