Spatial Dynamical Modelling
with TerraME (lectures 3 –
4)
Gilberto Câmara
Dynamic areas (current and future)
Escada et al. (2005)
New Frontiers
INPE 2003/2004:
Intense Pressure
Future expansion
Deforestation
Forest
Non-forest
Clouds/no data
Amazonian new frontier hypothesis (Becker)
“The actual frontiers are different from the 60’s and the
70’s
In the past it was induced by Brazilian government to
expand regional economy and population, aiming to
integrate Amazônia with the whole country.
Today, induced mostly by private economic interests and
concentrated on focus areas in different regions.
Modelling Land Change in Amazonia
Territory
(Geography)
Money
(Economy)
Modelling
(GIScience)
Culture
(Antropology)
Challenge: How do people use space?
Soybeans
Loggers
Competition for
Space
Small-scale Farming
Source: Dan Nepstad (Woods Hole)
Ranchers
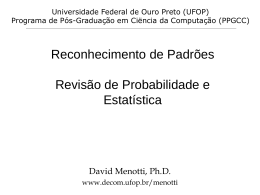
What Drives Tropical Deforestation?
% of the cases
5% 10% 50%
Underlying Factors
driving proximate causes
Causative interlinkages at
proximate/underlying levels
Internal drivers
*If less than 5%of cases,
not depicted here.
source:Geist &Lambin (Université Louvain)
Land-Use modelling
example
Vale do Anari (Rondonia.mdb database)
Small-scale government planned rural settlement in Vale
do Anari (RO), established in 1982 and land parcels
sized around 50 ha
TYPOLOGY OF LAND CHANGE ACTORS IN VALE DO ANARI REGION
Land use
patterns
Spatial
distribution
Clearing
size
Variable
Actors
Main land
use
Linear
(LIN)
Roadside
Irregular
(IRR)
Near main Small
settlements
(< 50 ha)
and
main
roads
Regular
(REG)
Near main Medium and Midsized
Cattle
settlements large
and
large ranching
and
main (> 50 ha)
farms
roads
irregular
Description
Small
households
Subsistence Settlement parcels less than
agriculture 50 ha. Deforestation uses
linear patterns following
government planning.
Small
farmers
Cattle
ranching
and
subsistence
agriculture
linear
Settlement parcels less than
50 ha. Irregular clearings
near
roads
following
settlement parcels.
Patterns produced by land
concentration.
regular
Vale do Anari – 1985
source: Escada (2006)
Pattern type
Geometrical
Irregular
Linear
Vale do Anari – 1985 - 1988
source: Escada (2006)
Pattern type
Geometrical
Irregular
Linear
Vale do Anari – 1988 - 1991
source: Escada (2006)
Pattern type
Geometrical
Irregular
Linear
Vale do Anari – 1991 - 1994
source: Escada (2006)
Pattern type
Geometrical
Irregular
Linear
Vale do Anari – 1994 - 1997
source: Escada (2006)
Pattern type
Geometrical
Irregular
Linear
Vale do Anari – 1997 - 2000
source: Escada (2006)
Pattern type
Geometrical
Irregular
Linear
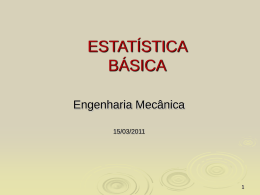
Vale do Anari – 1985 - 2000
source: Escada (2006)
Pattern type
Geometrical
Irregular
Linear
Can you grow it?
Anari -1985
Anari -1995
Anari -2000
1. Simple diffusive model: number of deforested neighbours
2. Diffusive model: : number of deforested neighbours + additional
factors
3. Statistical model without neighbours
4. Statistical model with neighbours
Can you grow it?
Anari -1985
Anari -1995
Anari -2000
-- CONSTANTS (MODEL PARAMETERS)
CELL_AREA = 0.25; -- 500 x 500 meters or 0.25 km2
DEMAND= 500; -- 100 km2
Vale do Anari (1985)
Vale do Anari (1995)
Vale do Anari (2000)
Pattern type
Geometrical
Irregular
Linear
General outline of land change models
Calculate potential
for change
Order cells according
to potential
Demand for
change
Allocate change
on cells
Spatial Iterator in TerraME
it = SpatialIterator {
csQ,
function(cell) return cell.champion == “Brazil”; end
}
Ordering cells in TerraME
Demand for
change
Calculate potential
for change
Order cells according
to potential
Allocate change
on cells
-- Step 2: Order cells according to potential
it = SpatialIterator {
csQ,
function(cell) return cell.pot > 0; end,
function (c1,c2) return c1.pot > c2.pot; end
}
-- Step 3: allocate changes to most suitable cells
count = 0;
for i, cell in pairs( it.cells ) do
if (count < num_cells_ch) and (count < it.count) then
cell.cover_ = "deforested";
count = count + 1;
end
Exercise 1 – Simple diffusive model
Expansion based on neighbourhood potential
More deforested neigbours, more potential for
change
Exercise 2 – Modified diffusive model
Expansion based on five factors:
1. Neighbourhood potential
2. Distance to main road (dist_rodovia_BR)
3. Distance to primary side roads (dist_ramal_princ)
4. Distance to secondary side roads (dist_ramal_sec)
5. Distance to urban centers (dist_urban)
main road
primary side road
secondary side road
Exercise 3 – Neighbourhood + regression
Expansion based on two factors:
1. Neighbourhood potential (50%)
2. Linear regression (50%)
poti= - 0.0012* dist_rodovia_BR
- 0.06* dist_ramal_princ
- 0.003* dist_ramal_sec
(normalize to [0,1])
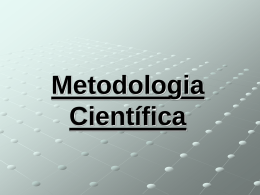
Simple Linear Regression
20
18
16
14
12
10
8
6
4
2
0
-0.5
R2= 0.43
0
forest
0.5
1
deforested
1.5
Exercise 4 – Spatial regression
Expansion based on spatial regression
(includes neighbourhoods)
poti = 0.173*num_deforested_neigh
-0.1 * math.log10 (cell.dist_rodovia_BR/1000)
+ 0.053*math.log10 (cell.dist_ramal_princ/1000)
-0.157 * math.log10 (cell.dist_ramal_sec/1000)
(normalize to [0,1])
Exercise 4 – Spatial Regression
R2= 0.84
Aula 9 – Modelo Bayesiano
Tiago Carneiro
Gilberto Câmara
Método Bayesiano
Conceitos do método
probabilidade a priori
probabilidade a posteriori
Probabilidade a priori – o que sei quando tenho
informação geral e não conheço os dados
Probabilidade a posteriori – o que sei a mais quando
tenho informação adicional
Teorema de Bayes
Chove 60 dias por ano em Campos do Jordão
Será que vai chover amanhã?
Probabilidade a priori = 60/360 = 0.15
Será que vai chover amanhã, dado que estamos no
verão?
Sabemos que metade dos dias de chuva em Campos
ocorrem no verão
Probabilidade a posteriori = (30/60) = 0.5
Teorema de Bayes
P(C V )
P(C | V )
P(V )
Prob (chuva no verão) =
(dias de chuva no verão)/(dias de verão)
Dinâmica - Arquitetura
http://www.csr.ufmg.br/
Teorema de Bayes aplicado ao espaço
Área de Estudo, E
Evidência: Distancia, D = pres.
Evento: Floresta_Desmate, FD
Evidência: Distancia, ~D = aus.
Usar evidências adicionais para aumentar a informação
disponível
Quanto maior for a intersecção entre a área da
evidência e o evento, maior será o peso da evidência
Teorema de Bayes aplicado a uma
evidência
P( E1 | T )
P(T | E1 ) P(T )
P( E1 )
P( E1 | T )
log(T | E1 ) logP(T ) log
P( E1 )
P( E1 | T )
pot(T | E1 ) log
P( E1 )
Teorema de Bayes aplicado a duas
evidências
P( E1 | T ) P( E2 | T )
P(T | E1 E2 ) P(T )
P( E1 )
P( E2 )
P( E1 | T )
P( E2 | T )
pot( P(T | E1 E2 )) log
log
P( E1 )
P( E2 )
Teorema de Bayes aplicado a uma
evidência e uma ausência
P( E1 | T ) P( E2 | T )
P(T | E1 E2 ) P(T )
P( E1 )
P( E2 )
P( E1 | T )
P( E2 | T )
pot( P(T | E1 E2 )) log
log
P( E1 )
P( E2 )
Teorema de Bayes aplicado a duas
evidências
P( E1 | T )
P ( E2 | T )
pot(T | E1 E2 ) log
log
P( E1 )
P ( E2 )
P( E1 | T )
P ( E2 | T )
pot(T | E1 E2 ) log
log
P( E1 )
P ( E2 )
P( E1 | T )
P ( E2 | T )
pot(T | E1 E2 ) log
log
P( E1 )
P ( E2 )
P( E1 | T )
P ( E2 | T )
pot(T | E1 E2 ) log
log
P( E1 )
P ( E2 )
Como calcular as probabilidades (caso
discreto)?
P( E1 | T ) N ( E1 T ) / NT
P( E1 )
N ( E1 ) / NT
P( E1 | T )
N ( E1 T )
P( E1 )
N ( E1)
Influencia adicional de uma evidência =
ocorrências conjuntas / total de ocorrências
Como calcular as probabilidades (caso
discreto)?
P( E1 | T ) N ( E 1 T ) / N T
P( E1 )
N ( E1 ) / N T
P( E1 | T )
N ( E 1 T )
P( E1 )
N ( E 1)
Influencia de ausência de evidência =
eventos sem evidência / total de ausências
Como calcular as probabilidades (caso
contínuo)?
P( E1 | T )
pot (T | E1 ) log
P( E1 )
Caso mais simples – potencial baseado em distâncias
Considerar que
P(E1) – probabilidade da evidência não condicionada é uma
distribuição normal
P(E1| T) – probabilidade da evidência condicionada à transição é
uma distribuição fuzzy
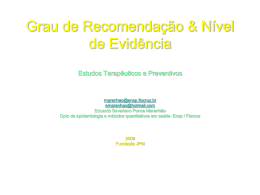
Distribuição Fuzzy para o caso de distâncias
1,2
1
0,8
0,6
Distancia
0,4
U(x) = 1 se x ,
0,2
Valor
máximo
16
0
12
0
90
70
50
20
0
Valor
mínimo
U(x) = 1/[1+ (x )2], se x > .
= 1/(z0.5 )2
Exercício Simples – Modelo Bayesiano
Vale do Anari 1995 projetado para 2000
Baseado nas transições 1985-1995
Três parâmetros
Distância à estrada principal
Distância às estradas secundárias
Distância às estradas vicinais
Usa as probabilidades bayesianas contínuas (não é
pesos de evidência)
Dados – Vale do Anari (1985)
Vale do Anari (1995)
Vale do Anari em 2000 (dado real)
Geométrico
Irregular
Linear
Vale do Anari (1995 projetado para 2000) Bayes
Exercício 4 - Anari 1995 projetado para
2000 (estatístico)
Comparação Bayes - estatístico
Uso de probabilidade bayesiana é promissor
Resultados preliminares são encorajadores
Sugestão do Tiago: patcher e expander
Patcher: Antes da mudança verificar se na vizinhança existe
alguma células desflorestada. Caso exista, esta célula deve ser
desconsiderada.
Expander: Exatamente o contrário. Devo selecionar somente as
células cujas vizinhanças possuem células desflorestada.
Aula 9 – Modelo Bayesiano
Tiago Carneiro
Gilberto Câmara
Modelos Estocásticos – DINAMICA
Modelos Estocásticos – DINAMICA
Modelos Estocásticos – DINAMICA
Modelos Estocásticos – DINAMICA
Modelos Estocásticos – DINAMICA
Módulo externo: VENSIM (Soares Filho et al., 2002)
Modelos Estocásticos – DINAMICA
Dinamica (Soares Fº e CSR,1998): Modelo de Mudanças da Paisagem
SIMULAÇÕES
TERRA NOVA
1986 - 1994
(MT)
SIMULAÇÃO 1
SIMULAÇÃO 2
PAISAGEM OBSERVADA - 1994
regeneração
desmatamento
mata
Modelos Estocásticos – DINAMICA
Dinamica (Soares Fº e CSR,1998): Cenários da Amazônia
Cenário: “Governance”
Cenário: “Business as Usual”
Modelos Estocásticos – DINAMICA
Simulação de Uso do Solo Urbano: Bauru, SP
Método Peso de Evidências
S1
S2
Dados de uso do solo urbano para calibração
S3
Conjunto de evidências.
Ex: densidade de estabelecimentos comerciais
Simulações
Fonte: RIKS, 2000
Almeida, 2001
Modelos Estocásticos – DINAMICA
Simulação de Uso do Solo Intra-Urbano: Savassi – Belo Horizonte, MG
Godoy, 2004
Modelos Estocásticos – DINAMICA
Funcionalidades
Estrutura aberta: suporta diferentes aplicações (floresta, urbano,
águas, dispersão de fogo etc.).
Modelo aberto a diferentes parametrizações (pesos de evidência,
regressão logística, redes neurais, MCE, árvore de decisão etc.).
Algoritmos de transição por expansão ou nucleação. Algoritmo
genético para definição das melhores faixas de distância.
Módulo: construtor de estradas (temporalidade da variável de
entrada)
um modelo de CA embutido em um modelo de CA.
Modelo externo de probabilidades globais de transição permitem a
geração de cenários variados.
Método Bayesiano
Conceitos do método
probabilidade a priori
probabilidade a posteriori
Probabilidade a priori – o que sei quando tenho
informação geral e não conheço os dados
Probabilidade a posteriori – o que sei a mais quando
tenho informação adicional
Teorema de Bayes
Chove 60 dias por ano em Campos do Jordão
Será que vai chover amanhã?
Probabilidade a priori = 60/360 = 0.15
Será que vai chover amanhã, dado que estamos no
verão?
Sabemos que metade dos dias de chuva em Campos
ocorrem no verão
Probabilidade a posteriori = (30/60) = 0.5
Teorema de Bayes
P(C V )
P(C | V )
P(V )
Prob (chuva no verão) =
(dias de chuva no verão)/(dias de verão)
Dinâmica - Arquitetura
http://www.csr.ufmg.br/
Teorema de Bayes aplicado ao espaço
Área de Estudo, E
Evidência: Distancia, D = pres.
Evento: Floresta_Desmate, FD
Evidência: Distancia, ~D = aus.
Usar evidências adicionais para aumentar a informação
disponível
Quanto maior for a intersecção entre a área da
evidência e o evento, maior será o peso da evidência
Teorema de Bayes aplicado a uma
evidência
P( E1 | T )
P(T | E1 ) P(T )
P( E1 )
P( E1 | T )
log(T | E1 ) logP(T ) log
P( E1 )
P( E1 | T )
pot(T | E1 ) log
P( E1 )
Teorema de Bayes aplicado a duas
evidências
P( E1 | T ) P( E2 | T )
P(T | E1 E2 ) P(T )
P( E1 )
P( E2 )
P( E1 | T )
P( E2 | T )
pot( P(T | E1 E2 )) log
log
P( E1 )
P( E2 )
Teorema de Bayes aplicado a uma
evidência e uma ausência
P( E1 | T ) P( E2 | T )
P(T | E1 E2 ) P(T )
P( E1 )
P( E2 )
P( E1 | T )
P( E2 | T )
pot( P(T | E1 E2 )) log
log
P( E1 )
P( E2 )
Teorema de Bayes aplicado a duas
evidências
P( E1 | T )
P ( E2 | T )
pot(T | E1 E2 ) log
log
P( E1 )
P ( E2 )
P( E1 | T )
P ( E2 | T )
pot(T | E1 E2 ) log
log
P( E1 )
P ( E2 )
P( E1 | T )
P ( E2 | T )
pot(T | E1 E2 ) log
log
P( E1 )
P ( E2 )
P( E1 | T )
P ( E2 | T )
pot(T | E1 E2 ) log
log
P( E1 )
P ( E2 )
Como calcular as probabilidades (caso
discreto)?
P( E1 | T ) N ( E1 T ) / NT
P( E1 )
N ( E1 ) / NT
P( E1 | T )
N ( E1 T )
P( E1 )
N ( E1)
Influencia adicional de uma evidência =
ocorrências conjuntas / total de ocorrências
Como calcular as probabilidades (caso
discreto)?
P( E1 | T ) N ( E 1 T ) / N T
P( E1 )
N ( E1 ) / N T
P( E1 | T )
N ( E 1 T )
P( E1 )
N ( E 1)
Influencia de ausência de evidência =
eventos sem evidência / total de ausências
Como calcular as probabilidades (caso
contínuo)?
P( E1 | T )
pot (T | E1 ) log
P( E1 )
Caso mais simples – potencial baseado em distâncias
Considerar que
P(E1) – probabilidade da evidência não condicionada é uma
distribuição normal
P(E1| T) – probabilidade da evidência condicionada à transição é
uma distribuição fuzzy
Distribuição Fuzzy para o caso de distâncias
1,2
1
0,8
0,6
Distancia
0,4
U(x) = 1 se x ,
0,2
Valor
máximo
16
0
12
0
90
70
50
20
0
Valor
mínimo
U(x) = 1/[1+ (x )2], se x > .
= 1/(z0.5 )2
Exercício Simples – Modelo Bayesiano
Vale do Anari 1995 projetado para 2000
Baseado nas transições 1985-1995
Três parâmetros
Distância à estrada principal
Distância às estradas secundárias
Distância às estradas vicinais
Usa as probabilidades bayesianas contínuas (não é
pesos de evidência)
Dados – Vale do Anari (1985)
Vale do Anari (1995)
Vale do Anari em 2000 (dado real)
Geométrico
Irregular
Linear
Vale do Anari (1995 projetado para 2000) Bayes
Exercício 4 - Anari 1995 projetado para
2000 (estatístico)
Comparação Bayes - estatístico
Uso de probabilidade bayesiana é promissor
Resultados preliminares são encorajadores
Idéia – fazer mais experimentos
Download