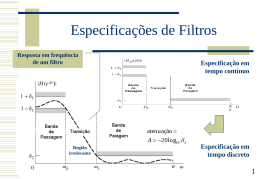
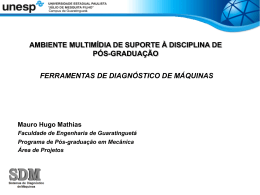
Especificações de Filtros Resposta em frequência de um filtro Especificação em tempo contínuo atenuação A 20 log10 2 Região irrelevante Especificação em tempo discreto 1 FIR e IIR FIR – Finite Impulse Response Filter (Resposta ao Impulso Finita) M – ordem do filtro M M m 0 m 0 y[n] bm .x[n m] H ( z ) bm .z m IIR – Infinite Impulse Response Filter (Resposta ao Impulso Infinita) N M k 0 m0 ak . y[n k ] bm .x[n m] H ( z) N – ordem do filtro M m b . z m m0 N Só tem zeros sempre estáveis Contêm zeros e pólos k a . z k k 0 2 FIR vs IIR FIR São sempre estáveis Permitem facilmente fase linear Podem necessitar de ordem elevada IIR Menor peso computacional 3 Projecto de Filtros IIR Conversão de Filtros Analógicos •Aproveita os resultados dos sistemas analógicos Transformação Bilínear Provoca uma transformação na frequência • Um mapa do plano-s para o plano-z 2 tan( / 2) 2 1 z 1 T s T 1 z 1 2arctan(T / 2) Mapa exacto seria (AD-DSP-DA): sT e z 4 Transformação Bilínear Transforma o semi-plano complexo esquerdo no circulo unitário! Sistemas estáveis resultam em sistemas estáveis Transformação na frequência: 2 1 z 1 s 1 T 1 z Especificações devem ser ajustadas de forma a compensar a transformação 1 (T / 2) s z 1 (T / 2) s 5 Invariância ao Impulso AK H ( s) k s sK h(t ) AK e sK t u[t ] TL1 k amostragem AK H ( z) 1 1 z z k k TZ zk e hn AK zk u[n] n k sk T 6 Filtros Butterworth São filtros que têm uma característica de amplitude maximamente plana na banda de passagem. Têm a seguinte resposta em amplitude: 2 1 H c ( j) 1 ( j / jc ) 2 N H C ( j) 1 /( / C ) 2 N 2 A sua transformada de Laplace é constituída apenas por pólos nas posições: s e( j / 2 N )( 2k N 1) k C H ( s) 1 N (1 s / s ) k k 1 7 Filtros Chebyshev Permitem oscilações na banda de passagem de forma permitir a utilização de filtros de menor ordem relativamente ao Butterworth. 1 H c ( j) 1 2VN2 ( / c ) 2 V0 ( x) 1 V1 ( x ) x V2 ( x) 2 x 2 1 VN 1 ( x) 2 xVN ( x) VN 1 ( x) H C ( j) 1 / 2 4 N 1 ( / C ) 2 N 2 8 Filtros passa-banda Projecto em tempo continuo Transformação passa-baixo passa banda Escolher o tal que, B Especificações P2 P1 o2 S1 S 2 o2 P1 P 2 ou mais apertadas TPassa Banda (s) TPassa Baixo (S ) S s 2 02 Low Pass 2 0 2 B P 2 Low Pass 1 P1 Low Pass 1 Bs S 2 / 1 Low Pass 1 B Low Pass 2 S 2 S 1 P 2 P1 1 4 02 B 2 2Low Pass 9 Filtros passa-banda o2 S1 S 2 S P 2 P1 P1 S 2 B P 2 P1 S 2 S 1 P 2 P1 Deve-se escolher P1 e P2 de forma que: o2 P1 P 2 Mas garantindo que P1< P1real e P2> P2real 1 S 10 Projecto de Filtros FIR Método da Janela Especificação de uma resposta ideal na frequência e determinação da resposta impulsiva correspondente: 1 hd [n] 2 H d (e j ) Multiplicação por janela: h[n] hd [n d ]w[n] Atraso da janela 1, Janela w[n] rectangular: janela 0nM 0, cc j j H ( e ) e d d Pode ser infinita e não causal truncagem d M /2 11 Janela Rectangular j W (e ) e jM / 2 sin[ ( M 1) / 2] sin[ / 2] 12 Outras Janelas Bartlett (triangular) 2n / M , 0 n M / 2 w[n] 2 2n / M , 0 n M / 2 0, cc Rectangular 1, 0 n M w[n] 0, cc Hanning 0.5 0.5 cos(2 n / M ), 0 n M w[n] 0, cc Hamming 0.54 0.46cos(2 n / M ), 0 n M w[n] 0, cc Blackman 0.42 0.5 cos(2 n / M ) 0.08cos(4 n / M ), 0 n M w[n] 0, cc 13 Janelas Rectangular (o riple ou a atenuação nunca baixam de 20dB por maior que seja a ordem! Fenómeno de Gibbs) Hamming triangular Blackman Hanning 14 Janelas 15 Janela de Hanning n' n M / 2 w[n] (0.5 0.5 cos(2 n / M )) wR [n] w[n' ] (0.5 0.5 cos(2 n' / M )) wR [n' ] 2 2 W (e j ) ( ) 2 M 2 M W (e j ) j .WR (e ) WR (e j ) sin[ ( M 1) / 2] WR (e ) sin[ / 2] WR – Janela Rectangular j W – Janela Hanning 16 Janela Kaiser I 0 [ (1 [( n ) / ]2 )1/ 2 ] , 0nM w[n] I0 ( ) Funções de 0 , cc 0.1102( A 8.7), A 50 0.5842( A 21) 0.4 0.07886( A 21), 21 A 50 0.0, A 21 s p Ordem do filtro (dB) A8 M 2.285 A 20 log10 Bessel modificadas de ordem zero Permite trocar largura do lobo principal por amplitude do lobo secundário 1 2 É simples obter e M dadas as especificações 17 Projecto Equiriple de FIR Janela rectangular minimiza 1 2 2 H j d j 2 (e ) H (e ) d Outro critério é o do erro máximo max H d (e j ) H (e j ) Filtros de oscilação constante (equiriple) M Resulta em filtros de menor ordem do que pelo método das janelas 10 log( 1 2 ) 13 2.324 Parks-McClellan algorithm 18 Projecto Equiriple Erro quadrático mínimo (janela rectangular) Óptimo sinais de banda larga, ex: ruído branco Equiriple (erro máximo mínimo) Garante que qualquer sinal fora da banda é atenuado pelo menos A dB Projecto para o pior caso, ie, sinais de banda estreita junto à banda de transição 19
Download