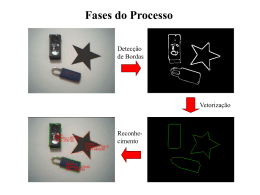
Visão Computacional Features (características) http://www.dca.ufrn.br/~lmarcos/courses/visao Sinopse • Conceito de features • Arestas, contornos, curvas • Features não geométricas • O que são features? • Feature global – Uma propriedade global de uma imagem ou parte dela, por exemplo, média dos níveis de cinza, área em pixel. • Feature local – Parte de uma imagem com propriedades especiais, por exemplo, um círculo, uma linha, ou uma região com textura numa imagem de intensidade, uma superfície plana numa imagem de profundidade Definição • Features (características) de imagem são partes detectáveis locais da imagem com algum significado (meaningful) • Seqüência de operações iniciais dos sistemas de visão: – Detecção (realce) de features – Localização de features Significado (meaningful) • Associadas a elementos de interesse na cena via o processo de formação de imagens – Variação alta da intensidade causada pelos contornos – Regiões com nível de intensidade uniforme – Algumas vezes procuramos features que não se traduzem a alguma característica na imagem mas refletem arranjos particulares dos pixels com certas propriedades desejadas (invariância, coisas fáceis de detectar). Detectáveis • Deve existir um algoritmo de localização, caso contrário, a feature não serve para nada • Features diferentes são associadas a algoritmos de detecção diferentes; • A saída geralmente são os descritores das features, especificando posição e outras propriedades essenciais da feature. – Ex: descritor de linha contém o ponto central, seu tamanho e orientação. Arestas (bordas) • São pixels (ou regiões) da imagem onde o valor da intensidade possui uma variação brusca • Problema de detecção de arestas: – dada uma imagem (considere com erro), localizar as arestas geradas pelos elementos da cena (não pelo erro) Por que aresta interessa? • Contornos de elementos de interesse na cena – objetos sólidos, marcas em superfícies, sombras – Linhas, curvas e contornos (elementos básicos para muitos algoritmos) são cadeias de pixels de arestas – Line drawing (wire frame) é são imagens comuns e sugestivas para seres humanos Algoritmo • Suavização do ruído – suprimir ruídos sem destruir arestas – assumir ruído branco ou gaussiano • Realce de arestas – projetar um filtro que responda a arestas – valor alto nas arestas e baixo fora delas • Localização de arestas – decidir que máximos locais no filtro são arestas • afinar arestas grossas para um pixel de largura • estabelecer um valor mínimo para aresta (treshold) Detetor de arestas de Canny • Seja f(x,y) uma imagem, com ruído branco ou gaussiano • Para eliminar (ou diminuir) ruído, convoluir com o filtro gaussiano Gaussiano Espaço Freqüência Gradiente do Gaussiano Espaço Freqüência Laplaciano do Gaussiano Espaço Freqüência Canny • Então f*g suprime erro antes da detecção de arestas, ou seja, limita f em banda, mas ainda é uma boa aproximação de f • Então, para detectar arestas, basta aplicar diferenciação Canny • Como o filtro gaussiano é linear, leva-se a diferenciação para a máscara da gaussiana e então aplica-se o resultado (outra máscara) à imagem original. • O resultado é o mesmo que se fosse primeiro suavizado e depois diferenciado. Algoritmo de Canny • Aplicar CannyEnhancer a I(i,j) • Aplicar NonMaxSuppression ao resultado • Aplicar HysteresisThresh ao resultado Função CannyEnhancer • Aplicar suavização gaussiana a I(i,j) (filtro linear com kernel gaussiano discretizado) J=I*G • Para cada pixel (i,j): – a) calcule as componentes do gradiente Jy e Jx – b) estime a magnitude da aresta (strenght) Es(i,j)=(Jx2(i,j)+Jy2(i,j))1/2 – c) estime a orientação da normal da aresta E(i,j)=atan2(Jy,Jx) Função NonMaxSuppresion • Considere as direções dk = 0, 45, 90, 135o • Para cada pixel em es(i,j) – ache a direção dk que melhor aproxima a direção de E(i,j) (a normal à aresta) – se Es(i,j) for menor que pelo menos um dos dois vizinhos ao longo de dk faça In(i,j)=0 (supressão); caso contrário, faça In(i,j)= Es(i,j) • Saída é imagem In(i,j) de pontos de arestas afinadas, isto é, Es(i,j) após supressão de pontos de aresta não máximos (max. locais) Eliminando máximos locais (tresholding) • A imagem afinada ainda contém máximos locais criados por erro • Uma idéia seria descartar pixels com valores menor que um treshold. Problemas: – se tentarmos capturar arestas verdadeiras que sejam fracas, algum erro pode ainda passar (contornos falsos) – os valores dos máximos verdadeiros podem flutuar ao longo de uma aresta, acima e abaixo do treshold, fragmentando a aresta resultante. Função HysteresisTresh • Entrada é a imagem In(i,j), E(i,j) e l e h, dois tresholds l<h • Para todos os pontos em In(i,j), passando numa ordem fixa: – localiza próximo pixel não visitado In(i,j) > h – começando de In(i,j), tente achar uma cadeia de máximos locais conectados em ambas as direções perpendiculares à normal à aresta desde que In(i,j) > l. – Marque todos os pontos visitados e salve a lista das posições dos pixels no contorno conectado encontrado. Saída do algoritmo • Conjunto de listas de arestas, cada uma descrevendo a posição de um contorno conectado na imagem • Imagem de orientação • Imagem de magnitude Generalidades • Hysteresis reduz probabilidade de falsos contornos, uma vez que estes devem produzir uma resposta maior que h para ocorrerem • Reduz probabilidade de quebra, requerendo flutuações muito maiores que no caso de simples thresholding • Tracking de arestas, achando máximos em arestas conectados, ou contornos conectados Algoritmo RobertsEdgeDetector (Input: imagem I(i,j) e treshold ) • Aplique remoção de ruídos caso deseje (Is) • filtrar Is(i,j) com as máscaras de roberts 1-1 -1 1 -1 1 1-1 obtendo duas imagens I1(i,j) e I2(i,j) • estime a magnitude do gradiente em cada pixel como G(i,j)=(I12(i,j)+I22(i,j))1/2 • marque como aresta todos o pixels em que G(i,j)>. Algoritmo SobelEdgeDetector • Mesmo que Roberts, exceto as máscaras do segundo passo • Prewitt: similar Detectando cantos • Considere o gradiente espacial da imagem dado por (Ex,Ey)t , com Ex=E/x e Ey=E/y; • Considere um pixel p genérico na imagem, uma vizinhança Q de p e uma matriz C: Ex2 ExEy C= ExEy Ey2 onde as somatórias são tomadas sobre a vizinhança Q. • A matriz C caracteriza a estrutura dos níveis de cinza da imagem, em cada pixel. Auto-valores e auto-vetores • A matriz C é simétrica, portanto pode ser diagonalizada por uma rotação do eixo de coordenadas, sem perda de generalidades: 1 0 C= 0 2 Os dois auto-valores 1 e 2 são não negativos (assumamos 1 > 2). Interpret. geométrica de 1 e 2 • 1) Considere uma vizinhança Q uniforme: o gradiente desaparece em toda a vizinhança, C vira uma matriz nula e 1=2=0 • 2) Assuma que Q contém um aresta degrau ideal preto para branco; temos então 2=0, 1>0 e o auto-vetor associado com 1 é paralelo ao gradiente da imagem • O posto (rank) de C é deficiente nos dois casos (0 e 1, respectivamente). Interpret. geométrica de 1 e 2 • 3) Considere que Q contém o canto de um quadrado preto contra um fundo branco: como tem duas direções principais em Q, espera-se que 1>2>0 e que quanto maior forem, mais forte (maior contraste) serão as linhas da imagem correspondente • Posto de C é 2 Interpret. geométrica de 1 e 2 • Auto-vetores codificam direções das arestas e auto-valores codificam sua magnitude. • Um canto é identificado por duas arestas fortes, então sendo 1>2, um canto é uma localização onde o menor deles é grande Algoritmo Corners (Input: I(x,y), threshold 2, e tamanho de Q) • Calcule o gradiente na imagem I(x,y) • Para cada pixel p: – a) componha a matriz C numa vizinhança 2n+1 – b) calcule 2, o menor dos auto-valores de C – c) se 2>, salve coordenadas de p numa lista L • Ordene L em ordem decrescente de 2 • Passando na lista (ordenada), para cada ponto corrente p, apague todos os pontos que aparecem depois na lista mas que pertençam também à vizinhança de p. Generalidades • O threshold pode ser estimado a partir do histograma de 2. • O tamanho da vizinhança Q não é trivial, não havendo um critério para sua definição. • Experiências indicam um tamanho entre 2 e 10 como sendo adequado na maioria dos casos práticos Operadores de textura Frei e Chen • A probabilidade de operadores de aresta encontrarem uma evidência zero de uma aresta em qualquer lugar da imagem é muito pequena, devido ao ruído superposto em variações de baixa freqüência • Algumas vezes, gradiente não funciona como esperado Operadores de Frei e Chen • Considere o conjunto de operadores: Operadores de Frei e Chen • Seja gk = f * hk, então: • Definindo • Se >threshold, reporte/rotule aresta Magnitude do gradiente x Threshold de Frei-Chen Detecção de linhas e curvas • Dada a saída de um operador de arestas, encontrar todas as instâncias de uma dada curva (linha ou elipse) ou parte dela (segmentos de linha ou arcos de elipses) • Agrupamento – Quais pontos da imagem compõem cada instância da curva alvo na imagem • Model fitting – Dado um conjunto de pontos na imagem provavelmente pertencente a uma instância única da curva alvo, encontrar a melhor curva que interpola os pontos Transformada de Hough (linhas) • Transforma detecção de linhas em um problema de interseção de linhas • Qualquer linha y=mx+n é identificada por um par (m,n), representada por um ponto no plano (m,n) , o espaço de parâmetros • Por outro lado, qualquer ponto p=(x,y) na imagem corresponde a uma linha n=-mx+y no espaço de parâmetros • Variando (m,n), pode-se representar todas as linhas possíveis que passam em p Transformada de Hough (linhas) • Uma linha definida por k pixels colineares p1,...pk, é identificada no espaço de parâmetros pela interseção das linhas associadas a p1,...,pk n x p2 p1 n m=tan y m Transformada de Hough (linhas) • Basta transformar interseção de linhas em um problema de detecção de pico, procurando por um máximo de interseções • Dividir o plano (m,n) numa grade discreta (resolução depende da precisão desejada) • Associar um contador a cada célula, inicialmente zero para todas Exemplo • Seja apenas uma linha (m´,n´) na imagem, formada pelos pontos p1,...,pk • Para cada pixel pi, incremente todos os contadores na linha correspondente no espaço de parâmetros • Todas as linhas r1,...,rk no espaço de parâmetros associadas a p1,...,pk terão os mesmos parâmetros (m´, n´), de modo que c(m´,n´) = k e os contadores das outras linhas são 1. • Basta então achar o pico de c(m,n) Na prática n=-mx+y y=mx+n y 2 n m=1 n=0 1 1 2 x 1 x=1 y=1 1 n=-m+1 m=0, n=1 m=1,n=0 x=2 y=2 n=-2m+2 m=0, n=2 m=1,n=0 m Problemas com m e n • Como manter m e n (que são infinitos) dentro de uma resolução desejada (discreto), de modo a não perder linhas? • O par (m,n) não captura a linha x=c (com c constante) Representação polar • Usar representação polar: =x cos+y sin, onde representa a distância entre a origem da imagem e a linha e a sua orientação • Os parâmetros e são finitos e podem representar qualquer linha x x p2 p1 n m=tan y p2 p1 =x cos+y sin y Detecção de várias linhas • Arestas na imagem podem ter varias linhas • Encontrar todas: olhar para todos os máximos locais em c(m,n) • Pontos em curvas ou ruídos geram pontos randômicos no espaço (m,n). • Basta passar um threshold • Ruídos Algoritmo HoughLines Input: E(i,j), d<=(M2+N2)1/2,d [0,] e R,T • Discretize espaço de parâmetros de e nos vetores d e d usando passos e • Seja A(R,T) matriz de contadores,em zero • Para cada pixel E(i,j)=1, e para h=1,...,T – faça =i cosd(h)+j sind(h) – ache o índice k, do elemento de d mais próximo de – incremente A(k,h) • Encontre todos os máximos locais (kp,hp), tais A(kp,hp)>, trhreshold def. pelo usuário HoughCurves Input: Seja f(x,a) parametrizacao da curva • Discretize os intervalos de variação de a1, ..., ap. Sejam s1, ..., sp os tamanhos dos intervalos amostrados • Seja A(s1, ..., sp) um vetor de contadores inteiros, inicialmente em zero • Para cada pixel E(i,j)=1, incremente todos os contadores na curva definida por y=f(x,a) em A • Encontre todos os máximos locais am tais que A(am)>, o trhreshold definido pelo usuário Homework • Implemente os algoritmos de deteção de arestas de Sobel, Prewit, Roberts, Chen e Frei. • Implemente o algoritmo de detecção de cantos do livro do Trucco. • Implemente os filtros Gaussiano, Gradiente do Gaussiano e Laplaciano do Gaussiano. • Teste a transformada de hough para linhas (use uma implementação já existente). • Faça um relatório, iincluindo as máscaras usadas de cada filtro, bem como as imagens resultantes. Comente os resultados.
Download