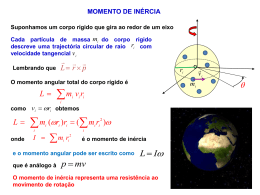
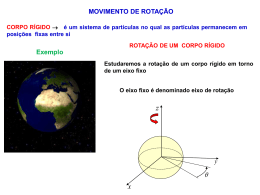
Capítulo 9 – Rotação de corpos rígidos Definição de corpo rígido (CR): um sistema de partículas especial, cuja estrutura é rígida, isto é, cuja forma não muda, para o qual duas partes sempre estão igualmente distantes Neste capítulo vamos analisar apenas o movimento de rotação do CR em torno de um eixo fixo. 9.1 – Velocidade angular e aceleração angular Vamos considerar a rotação de um CR em torno do eixo z z Qual variável descreve o movimento de rotação? 1. Escolhe-se um ponto de referência arbitrário (P) no CR P x y 2. A projeção da posição de P no plano xy faz um ângulo θ com o eixo x 3. A coordenada angular θ (medida em radianos) descreve completamente a orientação do CR Lembrando do ângulo em radianos (rad): s r r s Velocidade angular média: se o CR gira de θ1 a θ2 entre os instantes t1 e t2, então mz 2 1 t 2 t1 t (o índice z indica rotação em torno do eixo z) Velocidade angular instantânea: d z lim t 0 t dt Note a analogia com a cinemática em 1D: x vx z Note que todos os pontos do CR têm a mesma velocidade angular, mas podem ter diferentes velocidades escalares. Exemplo: rotação da Terra A e B têm a mesma velocidade angular, mas têm velocidades escalares diferentes Velocidade angular como vetor: direção ao longo do eixo de rotação e sentido dado pela regra da mão direita z Note que esta convenção é consistente com o sinal da derivada: d z dt x y Mas e a coordenada angular θ, é também um vetor? Não podemos associar um vetor ao deslocamento angular, pois vetores devem obedecer às regras da soma vetorial, o que não acontece neste caso. Por exemplo, a soma vetorial é comutativa (A B B A ), mas duas rotações sucessivas feitas em ordens diferentes dão resultados diferentes! 1 xˆ 2 yˆ 2 yˆ 1 xˆ (a menos que os ângulos de rotação sejam infinitesimais) Aceleração angular média: se a velocidade angular varia de ω1z a ω2z entre os instantes t1 e t2, então mz 2 z 1z t 2 t1 z t z d z Aceleração angular instantânea: z lim t 0 t dt Continuando a analogia com a cinemática em 1D: x d Aceleração angular também é um vetor: dt vx z Aceleração e velocidade angulares no mesmo sentido: rotação acelerada ax z Aceleração e velocidade angulares em sentidos opostos: rotação retardada 9.2 – Rotação com aceleração angular constante Usando a analogia com a cinemática em 1D, obtemos: Movimento retilíneo com aceleração constante Rotação em torno de um eixo fixo com aceleração angular constante v x v0 x a x t z constant e z 0 z z t 1 2 x x0 v0 x t a x t 2 v x2 v02x 2a x x x0 1 0 0 z t z t 2 2 z2 02z 2 z 0 1 x x0 v x v0 x t 2 0 a x constante Exemplo: Y&F 9.3 1 z 0 z t 2 9.3 – Relação entre cinemática linear e cinemática angular Lembrando que: s s r r Derivando: ds d r ds d r dt Onde: dt dt dt r v r ds v (velocidade escalar) dt d (velocidade angular escalar) dt s dv d r atg r Derivando mais uma vez: v r dt dt Onde: dv atg (component e tangencial da aceleracao) dt d (t axade variacaoda velocidade angular escalar) dt (Note que: z , mas z ) Finalmente, lembramos que: arad v2 2 r (aceleração centrípeta) r 9.4 – Energia no movimento de rotação Considere um CR em rotação com velocidade angular ω A energia cinética do CR será a soma das energias cinéticas de todas as partículas que compõem o CR: 1 K mi vi2 i 2 Sabemos que vi ri (todas as partículas têm a mesma vel. ang.) 1 1 2 2 2 Assim: K mi ri I 2 2 i Onde definimos o momento de inércia do CR em relação ao eixo de rotação: I mi ri 2 i Unidades S.I.: kg.m2 Notem uma nova analogia entre o movimento linear de translação de uma partícula e a rotação de um CR em torno de um eixo fixo: 1 2 mv (translação) 2 1 K I 2 (rotação) 2 K Momento de inércia: • Define a inércia para o movimento de rotação (inércia rotacional) • Não depende apenas da massa do CR, mas também de como ela está distribuída (dois objetos de mesma massa podem ter momentos de inércia diferentes) • Não é uma propriedade intrínseca do CR, mas depende da escolha do eixo de rotação Exemplo: sistema com 2 massas m de dimensões desprezíveis (partículas) unidas por uma haste fina de comprimento l e massa desprezível Eixo 2 Eixo 1 m l m Eixo 3 2 2 2 l l ml Eixo 1: I1 m m 2 2 2 2 I m 0 m l ml Eixo 2: 2 2 Eixo 3: 2 I3 m0 m0 0 2 2 Momentos de inércia de distribuições contínuas de massa: I mi ri2 r 2 dm r 2 dV i Exemplo: Y&F 9.9 Energia potencial gravitacional para um corpo com massa distribuída: y Ycm yi M g c.m. mi U mi gyi g mi yi gMYcm i i Como se toda a massa estivesse concentrada na posição do c.m. 9.5 – Teorema dos eixos paralelos Vamos relacionar os momentos de inércia Icm (em relação a um eixo que passa pelo c.m.) e IP (em relação a um eixo que passa por um ponto P qualquer, paralelo ao eixo que passa pelo c.m.) y yi M a P c.m. mi b xi I cm mi ri2 mi xi2 yi2 x i I P mi xi a yi b 2 2 i I P mi xi2 2axi a 2 yi2 2byi b2 i i I P mi xi2 yi2 2a mi xi 2b mi yi a 2 b2 i i i I P I cm 2aMXcm 2bMYcm M a2 b2 m i i y I P I cm 2aMXcm 2bMYcm M a2 b2 yi M a d P c.m. 0 mi b 0 I P I cm Md 2 xi x Teorema dos eixos paralelos Vamos verificar que funciona para uma haste fina: I cm 2 I extremidade 1 ML2 12 ML2 ML2 1 2 L I cm M ML 12 4 3 2 Próximas aulas: 4a. Feira 02/11: Não haverá aula 6a. Feira 04/11: Aula de Exercícios (sala A-327) 4a. Feira 09/11: Aula Magna (sala A-343)
Download