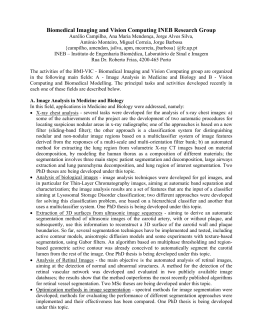
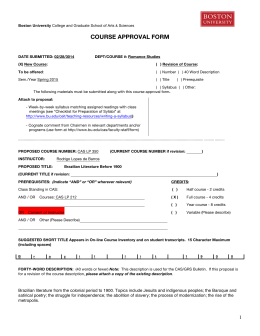
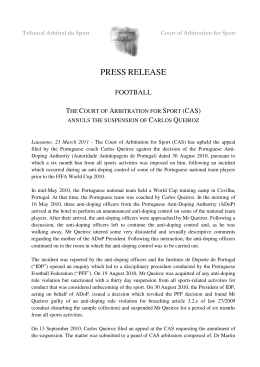
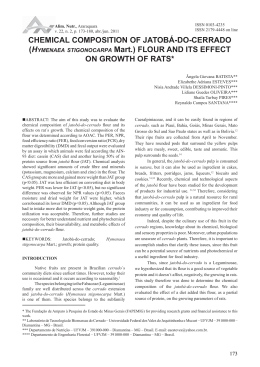
CaS: Collection-aware Segmentation Raquel Costa Manuel J. Fonseca Alfredo Ferreira INESC-ID/IST/Technical University of Lisbon Lisboa [email protected] {mjf,alfredo.ferreira}@inesc-id.pt Abstract Ao longo dos tempos, a segmentação tem provado ser um desafio devido à sua subjectividade. A segmentação depende não apenas do domı́nio em causa mas acima de tudo da interpretação que os humanos fazem do objecto. Para cada contexto, diversas soluções especı́ficas foram propostas com diferentes objectivos, limitações e vantagens. Neste trabalho propomos ultrapassar algumas dessas limitações usando o algoritmo de segmentação Collection-aware Segmentation (CaS). Este algoritmo identifica segmentos de objectos em colecções baseados na sua individualidade nessa colecção. Para esse efeito realizámos um conjunto de testes para compreender como as pessoas segmentam objectos numa colecção. A partir dos resultados destes testes desenvolvemos os algoritmos Adaped-CaS e Geons-augmented CaS. Avaliações experimentais com utilizadores mostraram que a abordagem proposta produz segmentações com significado para os humanos. Abstract Segmentation has always proven to be a challenge because of its subjectiveness. It depends not only of the application domain but also most on the human interpretation. To each context, several specific solutions were proposed with different goals, limitations and advantages. With this work we propose to overcome some of those limitations by improving the Collection-aware Segmentation algorithm (CaS). This algorithm identifies segments of objects in collections based on their individuality among the collection in which the objects belong. To that end we performed a set of tests to understand how humans segment a collection of objects. From the results of these tests we developed the Adaped-CaS and the Geons-augmented CaS algorithms. Experimental evaluation with users revealed that our approach produces a segmentation that is meaningful for humans. Keywords 3D Object Segmentation, 3D Object Collections, Automatic Segmentation, Similarity Estimation 1. Introduction Each human being interprets the environment from his own point of view. This generates an huge range of possible interpretations of the world, and his components. Thus, segmentation of objects may vary from individual to individual. Indeed, it and has been subject of studies in different areas, from mathematics to philosophy. Over the past decades object segmentation has been also tackled within the computer graphics domain, as a result of the growing number of 3D objects in digital format and the widespread of applications that use them. Many computer graphics applications, as animation, collision detection, object indexing and retrieval use the segmentation approaches as a stage of the core process. However, most of the existing object segmentation techniques are domain or context dependent. These perform well in the domain and context for which they were designed for, but not so good in other domains or contexts. To overcome this limitation we adopt a different approach that extends the Collection Aware Segmentation (CaS) method. This was originally proposed in [Ferreira 09] embedded in a solution for indexing and retrieval of 3D objects. In this paper we extend CaS to make it a stand-alone segmentation technique that produces meaningful results to the users, independently of the object domain. With the present work we isolated the CaS approach of the indexing and retrieval application, thus creating a segmentation algorithm that is application independent. As the original CaS approach, the Adapted CaS is based on the Hierarchical Fitting Primitives [Falcidieno 06] algorithm and uses Spherical Harmonics shape descriptor [Kazhdan 03]. By adding geon analysis [Biederman 87], we improved the algorithm, achieving better segmentation, closer to human perception. To evaluate the proposed approach, we conducted an experimental evaluation where several tests were performed. The first test focusing on understanding how humans segment 3D objects. From the results of this test we devel- Figure 1. Two different types of segmentation: a) Part Based Segmentation; b) Surface Based Segmentation. (Figure taken from [Shamir 08]) oped and refined our approach. Then, to evaluate the efficacy and effectiveness of the approach we executed performance tests to study execution time and memory requirements. Finally, to validate the quality of the segmentation, we organized a test where users where asked to compare the results of manual segmentation made by humans with results produced automatically by segmentation algorithms. In the remaining of this document we start with a brief presentation of related work on three-dimensional object segmentation. Then we describe the original Collection Aware Segmentation algorithm, followed by its evolution and the explanation on detail of how these work. On section 4 we describe the evaluation tests and discuss the corresponding results. In the last section, we present the conclusions of this work and reflect on future research paths on this topic. 2 2.1 Related Work Categorization of segmentation approaches Some authors [Agathos 07, Shamir 08] classify the segmentation techniques in two categories depending on the kind of segmentation accomplished, represented in Figure 1. The part based segmentation is closer to user perception and divides the object into sub-components, while the surface based segmentation are accomplished by analysing the surface shape features. Among these two types, the 3D object segmentation has been widely studied and different solutions that uses distinct approaches have been proposed. Some of the existing and more relevant are presented next. 2.2 Region Growing and Clustering The region growing methodology follows a exploratory approach that starts by visiting a seed (a face of the mesh), then agglomerates the adjacent faces by transversing the mesh and it stops when it reaches a stop condition. Such Figure 2. Hierarchical decomposition with fuzzy area represented in red. (Figure taken from [Katz 03]) condition can be the segment convexity. Then the process is restarted using a non visited face as a new seed. The approach proposed by Zuckerberger on [Zuckerberger 02], uses a depth first or breadth first search to transverse a graph that represents the mesh and the seed where it starts is a node of this graph. From this transverse is creates a segment and then, it restarts transversing on an unvisited node of the graph forming a new segment. In a similar way, Attene et al. [Falcidieno 06] approach also agglomerates faces, but instead of creating patch by patch, it creates all patches simultaneously. These are organized as an hierarchical tree in which the leafs are the mesh triangles and the root is the entire object. This tree is built bottom to top and clusters adjacent faces with the minimum merging cost that can be calculated on different ways. Attene et al. uses primitives by fitting them to the resultant cluster. Previously, Katz and Tal [Katz 03] had proposed to generate, in an iterative clustering, various results of segmentation given a number of clusters, and then chooses which is the best segmentation. It starts by creating a representative group of clusters and then each adjacent face is clustered until it reaches a ray r between the seed and the limit of the patch. This is used to agglomerate the faces that have more probability of belonging to a given segment, thus creating fuzzy areas, illustrated Figure 2. Lastly it is needed to transform the fuzzy decomposition in a final decomposition by refining the limits. 2.3 Skeleton Based This approach uses the skeleton of the object to determine the segmentation. The most used method to extract the skeleton is the Reeb Graph. For instance, Tierny et al. [Tierny 07] extract an enhanced topological skeleton by finding feature points located on object extremities using the geodesic distances. These are used to create a function that indicates the distance from a given point of the mesh to each feature point of the mesh and from there is built the Reeb graph. After having the skeleton, the object is seg- mented in the areas where each skeleton node corresponds to a segment of the object. 2.4 Geometry and Structure-Based The Taylor and Plumber algorithms, by Mortara et.al. [Mortara 03] uses the object shape to perform segmentation based on geometry and structure. These algorithms detects tubular features by blowing bubbles that starts on a seed that is predefined and stops blowing when it finds an abrupt change on the object shape, such as a bifurcation. Later, Mortara et al. [Mortara 06] used the Plumber approach to find the tubular zones in objects that represents the human body. 2.5 Feature Points and Core Extraction In an attempt to overcome the pose invariant limitation a new approach arises called Feature Points and Core Extraction that was proposed by Katz et al. in [Katz 05]. This initially creates a pose invariant representation of the object, then extracts the feature points and the core. After finding the core it is necessary to extract the rest of the segments which is done by matching each part to the feature points. In the end, it reverse the initial process so the object can come back to the same shape. 2.6 SDF A different approach was proposed by Shapira et al. in [Shapira 08]. They use the shape diameter function (SDF) for segmenting objects. In short, this gives the diameter of an object in a neighbour of a point and is used to merge points that have the same or close diameter values using a histogram. 2.7 Automatic Segmentation of 3D Collections The above referred approaches, as most existing approaches, segment 3D objects individually. The segmentation is performed object by object individually, instead of segmenting various objects simultaneously. Indeed, this is a relatively recent concept: to accomplish automatic simultaneous segmentation of sets of objects. The approaches that use the automatic segmentation of 3D collections use the information of similar objects to improve the results. The group of Thomas Funkhouser in Priceton is one of the groups that is already studying this subject. They presented an algorithm [Golovinskiy 09] that builds a graph whose nodes represents the mesh faces and the edges represents the edges of the mesh that connects adjacent faces of the same object. They also represent the correspondence between the faces of different meshes. In the next step the algorithm executes a hierarchical clustering of the graph, were the adjacent faces of the same model, and the correspondent faces of different models are going to probably belong to the same segment. 2.8 Discussion Several segmentation approaches have emerged as decomposition of 3D objects as is used in many different applications in distinct domains that require different segmentations. This also makes the task of evaluating the approaches hard to perform, due due the large number of approaches. Nevertheless, Funckhouser and his team defined a benchmark for 3D mesh segmentation [Chen 09], compared seven mesh segmentation algorithms and draw some interesting conclusions. However, a common limitation is the need of inputs provided by the users in order to decompose the objects. Some need to predefine the seeds like in Region Growing and Iterative Clustering Approaches. Others to select the level of the hierarchy generated by the segmentation approach, these are all the approaches that produce a hierarchical segmentation. The result of the segmentation has more segments that it should have producing over segmented result. Some approaches try to overcome this limitation by using post-processing stage that removes the extra segments by merging them to others or by initially predefining a maximum number of segments. The individual segmentation of objects can be considered a limitation if we consider segmenting a collection of objects. If the segmentation decomposes object by object as it is in the major approaches, then it can take more time to decompose the entire collection than if segmentation was performed simultaneously. In order to overcome the limitations highlighted above, we propose a different solution based on the CaS algorithm, presented in the next section. This is a segmentation approach that will be application independent. 3 Collection-aware Segmentation In this section we present a distinct approach for segmenting 3D objects whose main goal is to overcome some limitations found on existing approaches. We extracted the Collection-aware Segmentation (CaS) algorithm from the indexing and retrieval context where it was embedded [Ferreira 09], as a step of a complete solution, and extended it to a fully fledged 3D object segmentation algorithm. This led to the original CaS and to the evolution for Geons-Augmented CaS. 3.1 Original CaS for Retrieval The original CaS, integrated in a retrieval solution, did not indeed produced any object segmentation per se. Instead, it decomposes all objects in a collection and stores their subparts in a shape pool, used then for indexing the collection. This approach, depicted in Figure 3 has two main stages: the initialization stage and the iteration stage. In the first stage the foundations of the segmentation are computed and loaded into memory, while in the following stage the objects of the collection are iteratively segmented into subparts. The initialization starts by generating, for each object on the collection the respective hierarchical segmented mesh (HSM) using the Hierarchical Fitting Primitives (HFP) as proposed by Attene et al. [Falcidieno 06]. This approach consists on merging clusters and then fitting them to primitives to create the final clusters. Next it saves the resulting HSM on the HSM Set, producing a set of segmented meshes. Then is computed for each mesh, the ob- Observing figure 6 is possible to visualize that after adding theexecution, HSM nodesthe to iteration the NDL the initialization stage ends, so During the stage traverses the HSMs, it passes to the next stage, the iteration stage. This will use level by level, that is, each new iteration corresponds to a all the structures previously built. level on the hierarchy. In order to support the segmentation, the iteration stage uses the NDL. In practice, each iteration During the execution, the iteration stage traverses the HSMs, of the stage anlevel, iteration to each the NDL. So, thiscorresponds stage starts levelisby that is, new iteration to a on the first of the NDL and to verifies if the is decomposlevelelement on the hierarchy. In order support segmentation, the iteration stage uses the NDL. In practice, each iteration able or not. of the stage is an iteration to the NDL. So, this stage starts mbedded the first element of the the CaS/HFP NDL and verifies if is the decomposa step of Like was on previously referred, segments obable or not. egmenta- jects based on the collection where they belong. The figure 7 l solution represents the steps for labeling a segment as decomposable Like was previously referred, the CaS/HFP segments the obor not. It first verifies has reached triangle jects based on theifcollection wherethe theyminimal belong. The figure 7 count byrepresents calculating the minimal number of triangles bethe steps for labeling a segment as decomposable egmenta- tween both childIt nodes and compares this the minimal with a or not. first verifies if has reached minimal triangle nderstand previously defined value the minimum triangle in thisbecount by calculating the minimal numbercount, of triangles essary to case thistween child nodes compares this minimal with a valueboth is three, if the and minimal is bellow the minince one of mum triangle previously defined value theisminimum triangleifcount, in this count the segment decomposable is above age (CaS) this value is three, if the minimal is bellow minithen the case segment is labled as non decomposable. Thisthe step and also mum triangle count the segment is decomposable if is above prevents from reaching the triangles of the mesh. se of the then the segment is labled as non decomposable. This step Figure 4: Overall architecture of of the original CaS, prevents reaching the triangles the mesh. s that are Figure 3. from Overall architecture of the original casethe of the being no, it passes to the next step with tworesult stages (Initialization and Iteration). ose of the In the CaS, with thethe two main stages: initialization the K-Within (K-WR). Thisstep In execution the case of of result being no,Range it passes to the next ments re- that is the and iteration. algorithm is used to verify if a segment is singular, for that that is the execution of the K-Within Range (K-WR). This and other it was previously defined two thresholds, the similarity and algorithm is used to verify if a segment is singular, for that rent, this stages, thethresholds. initialization stage where the inputs oftothe iterit was previously defined two thresholds, similarity and similar count The first threshold is the used verify ation stageare are similar computed and saved thenthe passes toverify the similar count thresholds. The threshold is used to if two objects or not, tofirst be and similar distance iteration where segmentation is actually executed. if twostage objects are similar or not, tospace be similar ject signature thethe spherical harmonics shape descripof two objects onusing the multidimensional has tothe bedistance less has reached the end of the NDL and the NSL is empty, meaning that there are no more segments to be decomposed. So, the approach ends by returning the entire collection of decomposed objects. Figure 4. Overall architecture of Adapted Figure Overall architecture adapted CaS, with CaS,5:with the new NDL andof NSL structures. the two stages(Initialization and Iteration). Figure 5: Overall architecture of adapted CaS, with the two stages(Initialization and Iteration). Model Collection Model Collection Initialization Initialization HSMs HSMs Signatures Signatures NDL NDL Iteration Iteration of two objects on the multidimensional space has to be less tor (SHA) introduced by Kazhdan et al. [Kazhdan 03].segThe similar threshold, this is computed using the d in 4 the themAsthe them the similar threshold, computed Decomposer using the segrepresented on figures 5 and this 6 theisCaS/HFP resulting signatures are stored in the shape pool for further ments signatures and the distance between them. Then, on where signatures thecollection distance of between startsments by receiving theand entire objectsthem. on theThen, inisecond is used so when comparing a segment and loaded. the processing. thethreshold second used so when a segment tialization stage.threshold On thisisstage for each comparing object it computes all respective the segments that are onare theonshape pool, it the cannot f the col- withthe all the segments that the shape pool, it cannot Hierarchical Segmented Mesh using Hierthewith iteration stage, each signature on thecount shape pool is haveIn more similar segments than the similar threshhave more similar segments than the similar count thresharchical Fitting Primitives this generates a binary tree that verified for its uniqueness, thus being flagged for decomold.this With this it is going to verify if the segment old. isWith result itresult is It going toonverify if the segment is is built bottom to top. starts the leafs that represents position. This means thatnumber ifthen the number number similar elements singular, to be the ofofsimilar to be singular the of each similar segments hashas el Collec- singular, the triangles of thesingular mesh, for pairs ofsegments neighbors to be above the similar count, ifisisconsidered that the case, then the HSM) us- to be isitbelow athe pre-defined threshold, itthat as unique, above similar count, if is This the case, then theby calculates the merging cost. cost is calculated segment is labeled as decomposable. If not, it labels as not approach segment is alabeled as (cylinder, decomposable. Ifisnot, it labels astonot thus decomposable. This similarity computed using the fitting primitive cone, sphere and plane) the decomposable. them to decomposable. resulting cluster, then it compares the values and clusters differences between object signatures. the HSM the pairs less cost. being This new cluster generated If thethat resulthave is the segment decomposable, then it is Iffrom the object is decomposable, then it is decomposed by exsignature If the result istothe segment being decomposable, then itclusis the clustering are saved a parent node these going decompose it, forasthat, it goes to ofthe respective resents a going ploring the corresponding HSM on the HSM Set and getters, in theand tree. It repeats the process until it reaches the to HSM decompose it, for that, it goes to the respective get his child nodes. After having the child nodes, ject with HSM top ofit the three where it is saved the entire object. This tree and get hisnodes, child nodes. After having the child nodes, ting its child computing their signatures and adding calculates their respective signatures, adds them to the will be during the iteration stage and Segmented contains signature pool and insert both nodes on the Non it calculates their respective signatures, them to the them to transversed the Shape Pool. If the object isadds not decomposable, segments arelist going to bethe important for theare List (NSL), this contains segments that going signature pool and insert both nodes on the Non Segmented itthe passes to thethat next element on the shape pool. Theresult. iterwhere for tocomputing bethis processed on the next iteration and removes the proAfter these trees, the initialization stagegoing saves Listation (NSL), list contains the segments that are stage finishes whenthe there arepassing no more fy if it is cessed element from NDL to decomposable the next on the HSM to bethem processed on theSet. next iteration and removes the element pros unique, segments onNDL the shape pool the algorithm re-of on the that also willand be processed. Also ends in theby case cessed element from the NDL passing to the next element m on the thedecomposition result being notalgorithm the decomposable it passes to the next As the is based on the singularity turning the entire shape pool. Indeed, it does not produce NDL thatonalso processed. Also in the case of the will NDL.be step ted using on the of anelement object. The second of the initialization segmented versions ofdecomposable the objects in itthe modeltocollection. being not the passes thestage nextis cts. If the the result to compute the SHA signatures of each object. These are on the NDL.ends when it reaches the end of the NDL but iteration going to element shapeAn descriptors, thatfor is, Decomposition a numerical representation of the 3.2 Adapted CaS the iteration stage may ended or not. This depends on the the child object in a multidimensional space. Using these represenNSL,ends if the NSL is it notreaches empty itthe means that are new segments iteration when endin ofa the NDL but putes the An To produce segmentations for between objects collection, we tations makes the comparison segments easier and to be stage processed. So, it appends allThis the elements onon thethe NDL, iteration may ended or not. depends air on the the adapted this comparison is used a segment asAs decomposable the original CaSto forlabel decomposition. in the origthe NSL is not empty it means finishes that arebeing new segments it passes NSL,orifnot. when each consists signatures computed, inal, theAlso Adapted CaS on two main stages: the So, it appends all pool. the elements on the NDL, ion stage to beitprocessed. saves them on the signature initialization and the iteration. These stages have similar ments on purpose to the those CaS, are slightly the entire One of the main goalsonofthe thisoriginal Adapted CaSbut technique is to different and comprise new data structures, as in the final present the collection of objects decomposed, it depicted is no longer Figure 4. to have the Shape Pool, instead this adapted apnecessary proah uses a Signature Pool, so it is only necessary to visit The Adapted CaS decomposer receives as input the entire sition this set to label a segment as decomposable or not. This is collection on the stage. Onwhere this also one ofoftheobjects differences on initialization the initialization stage, S we now stage, forofeach object, it computes therespective corresponding HSM instead saving the object with the signature on ain stages the shape saves thea signature onthat the is Signature Pool the iterausing HFP.pool, This itgenerates binary tree built bottom and also without poolrepresents there no longer exists the me stages to top. It starts onthe the shape leafs that the triangles of second HSM built during the iteration stage instead is used purpose. the mesh, then for each pair of neighbours it calculates the to lists, the Non Segmented List (NDL), that has the next merging cost. This cost is calculated by fitting a primitive next segments to be processed and the segments that are e figure 6 (cylinder, sphere and plane) to the cluster, ows both labeled ascone, not decomposable and the Nonresulting Segmented List then it compares the values and clusters the pairs that have less cost. This new cluster generated from the clustering are saved as a parent node of these clusters, in the tree. It repeats the process until it reaches the top of the three Decomposed Decomposed Object Object End End Figure6: 6:5.High High fluxogram of of Adapted CaSCaS Figure level fluxogram Adapted Figure Highlevel level fluxogram of Adapted CaS. 3.3 Geons-augmented Geons-augmented CaS/HFP Decomposer 3.3 CaS/HFP Decomposer During the execution of the Manual Segmentation Test Us- During theOne execution of the Manual Test Using HFP. of the complains of the Segmentation users was that some ingobjects HFP. were One over of the complains the users was that segment. Thisofhappens because it wassome where itwere isHFP saved the entire object. These stored in objects over segment. This happens because it was used the approach. After executing the trees, adapted CaS used the HFP approach. After executing adapted CaS approach withwill different similarity and similar count threshthe HSM set, be transversed during thethe iteration stage we notice that this similarity problem still this threshap- an approach with andhappens similar5on count toolds produce thedifferent decomposed objects. Figure presents proach, so, to overcome this limitation ithappens was introduced a olds we notice that this problem still on this high level fluxogram of the decomposition process.if an apnew feature. introduction of the geons to verify proach, so, to The overcome this limitation it was introduced a objectthe is decomposable or not. Since decomposition algorithm is based singunew feature. The introduction of the geons on to the verify if an larity of an object, the second step of the initialization stage object is decomposable or not. The geons are simple 3D objects, like cylinders, cones, cubes. isThe to compute the SHA signaturesonof[4]each object. These theory proposed by Bieldman called ”Recogni- The geons are simpleTheory” 3D objects, likethat cylinders, cones, cubes. are shape descriptors, that is,defends a numerical of tion by Components likerepresentation English words The theory Bieldman on [4] called ”Recognithat are constituted byby a number of phonetics,complex obthe object inproposed a multidimensional space. Using these reprejects also be composed by these simpler objects, that tion bycan Components defends that3D like English words sentations makesthese theTheory” comparison between segments easier is, by objects we get these simpler obthat aresegmenting constituted bycomplex a number of phonetics,complex and this also comparison is used to label a segment as decomobjects jects can (Figure be 8). composed by these simpler 3D objects, that posable or not. Thus, computed signature is stored on is, by segmenting theseeach complex objects we get these simpler the signature pool for later use. objects (Figure 8). The main goal of this Adapted CaS technique is to present the collection of objects decomposed. Thus the shape poll is no longer necessary to and was replaced by the Signature Pool. It is only necessary to visit this set to label a segment as decomposable or not. Without the shape pool, no longer exists a second HSM build during the iteration stage. Instead two lists are used: the Non Segmented List (NDL), that contains the segments to be processed and the segments that are not labeled as decomposable and the Non Segmented List (NSL) that contains the segments that are going to be processed on the next iteration. So, at the end of the initialization stage, the NDL contains all the objects in the collection. During its execution, the iteration stage traverses the HSMs, level by level, that is, each new iteration corre- NDL Element Minimal TriCount Reached? K-WR Singular? Yes NO NO Yes Element Not Decomposable End Element Decomposable Figure 7: Decomposition fluxogram of adaptedofCaS Figure 6. Decomposition fluxogram Adapted CaS. sponds to the hierarchy. In order to Cone support the Archa level onBarrel Cylinder segmentation, the iteration stage uses the NDL. In practice, each iteration of the stage is an iteration to the NDL. So, this stage starts on the first element of the NDL and verifies if is decomposable or not. Handle Cube Ex-Cylinder Ex-Handle To segment the objects based on the collection where they belong, it is necessary to compare each sub-part with all other sub-parts. Figure 6 illustrates the steps for labelling Pyramid Ex-Pyramidas decomposable Wedge a segment or Plan not. It first verifies if has reached the minimal triangle count by calculating the numFigure 8: Example of both group of nodes geonsand used on the ber of triangles between child compares Geons-augmented approach this with a previously defined value - the minimum triangle count. If the triangle count is below this threshold, the segment is flagged as uses non-decomposable. This step pre-to As the CaS approach the HFP that uses primitives vents from reaching the triangles of the mesh. calculate the cost of merging clusters and there are some of case the Geons that aretriangle the same as have thesenot primitives so, usIn the minimum count been reached, ing these objects can helps to stop the segmentation when the element passes to the next step in the decomposition it find a geon. The Figure 9 represents the decomposition process. This consiststoonthe thefigure execution a K-Withinof fluxogram andstep is similar 7 andofdescription Range (K-WR) search. This algorithm returns firstcomKsection 3.2 being the main difference after thethefirst parison, ifwhose the minimal triangle count of the child nodes elements signatures are within a predefined rangeis above count predefined, it comand is the usedminimum to verifytriangle if a segment is singular.then For that parestwo thethresholds segmentedwere withpreviously the entiredefined: collection geons by end, theofsimilarity comparing the signature of the segment with each geon sigand similar count thresholds. The first threshold is used to nature. Then, if it is not similar, it proceeds as the previous verify if twothat objects similar not, toInbe description, is, it are executes theorK-WR. thesimilar case ofthe bedistance of two objects the multidimensional has ing similar to any of theongeons, then the segmentspace is libeled to them the similar threshold, this is computed usas be notless decomposable. ing the segments signatures and the distance between them. Then, the second threshold is used when comparing a segment with all the segmentsNOthat are onNOthe signature pool, it Yes Similar to NDL Minimal TriCount Singular? Geon? Element have more Reached? cannot similar segments than K-WR the similar count threshold. With this result it is is NO Yes verified if the segment Yes singular, to be singular the number of similar segments has Element to be above the similar count, if is that the case, then the Not Decomposable segment is labelled as decomposable. If not, it labels as not decomposable. Element End Decomposable If the result is the segment being decomposable, then it is going to decompose it, for that, it goes to the respecFigure Decomposition fluxogram of geons augtive HSM9:and get his child nodes. After having the child mented CaS nodes, it calculates their respective signatures, adds them to the signature pool and insert both nodes on the Non Segmented List (NSL), this list contains the segments that are going to be processed on the next iteration and removes the processed element from the NDL passing to the next ele- In order to compare the segments to the geons it is necessary to predefine the best similar values between them. So, the best values for the similarity thresholds between the segments and the geons where studied. To compare objects it is used, as was already referred, the Spherical Harmonics (SHA). One is that they are not scale invariant, that is, it takes into account the scale when comparing to objects, using the difference between signatures. So, it was not only necessary to discover the best similarity threshold for the usual geons but also a profound study about the different scales and different smooth variations on the geons to really overcome this problem of scale invariance. To overcome this limitation a study was performed on the cylinder, for that, is was used several different types of cylinders. In Figure 10 are represented the different variations of cylinders, the first row are the cylinders that are closed both on the top as on the bottom. The middle row are the Figure 7. Group of geons used on the Geonscylinders with a hole in the cross the object from one side augmented CaS. (top) to the other (bottom) but still has some thickness on the sides. The last row has the cylinders that are totally open, without a base or a top. Also the not scale invariance is shown on Figre 10. As this study was only about ment on the NDL will be processed. Also in the the cylinders, the that samealso is necessary to do for the remaining case of the result being not the decomposable it passes to geons. the next element on the NDL. As one of the primitives used on the HFP is the plane, this An iteration ends when reaches end ofBut the still NDLthis butis primitive was added to it the group the of geons. the iteration stage may ended or not. This depends on one of the main problems of using HFP, using planes, the this NSL, theresults NSL is empty it means that are new segmakesifthe of not segmentation in plane instead of volume as it should be, meaning the geons cube does ments to be processed. So,that it appends alllike the the elements on notNDL, work on this approach. a good to follow the remove them fromThus, the NSL andpath restarts a newin the future is to use another hierarchical technique instead of iteration by vising again the first element on the NDL. HFP and make a deeper study of these thresholds. The iteration stage and the entire algorithm ends when it has reached the end of the NDL and the NSL is empty, meaning that there are no more segments to be decomposed. So, the approach ends by returning the entire collection of decomposed objects. 3.3 Cylinder 1 Cylinder 2 Cylinder 3 Geons-augmented CaS Decomposer During the execution of the manual segmentation test using HFP, one of the complains of the users was that some objects wereCylinder over segment. This happens because it was 4 Cylinder 5 Cylinder 6 Cylinder 7 Cylinder 8 used the HFP approach. After executing the adapted CaS approach with different similarity and similar count thresholds we notice that this problem still happens on this approach, so, to overcome this limitation it was introduced a new feature. The introduction of the geons to verify if an object is decomposable or Cylinder not.11 Cylinder 12 Cylinder 9 Cylinder 10 The geons are simple 3D objects, like cylinders, cones, cubes. The theory proposed by Biederman on [Biederman 87] called ”Recognition by Components” Figure 10:like SetEnglish of cylinders usedare toconstituted stop fromby over states that, words that a segmenting number of phonetics, complex objects can also be composed by these simpler 3D objects, that is, by segmenting 4. EXPERIMENTAL EVALUATION complex objects we get these simpler objects. Thus we After completing the approach implementation, it was necadded a set of geons, partially depicted in Figureof7,the to imessary to verify the efficiency and effectiveness algoprove according to human perceprithm decomposition and refine the results approach. So, several tests were exetion. Since the CaS approach uses the HFP that uses primitives to calculate the cost of merging clusters and there are some of the geons that are the same as these primitives, using comparing the signature of the segment with each geon sighas a linear growing and comparatively, the geon augmented nature. Then, if it is not similar, it proceeds as the previous Cylinder 4 Cylinder 5 Cylinder 6 Cylinder 7 Cylinder 8 description, that is, it executes the K-WR. In the case ofCaS be- presents better results than the original CaS. It was also ing similar to any of the geons, then the segment is libeled possible to observe that the signatures computation is time as not decomposable. NDL Element Minimal TriCount Reached? NO Similar to Geon? Yes Yes NO K-WR Singular? Yes NO Element Not Decomposable End Time (thousand seconds) consuming and is where most of the time is spent. 12 10 Cylinder 9 Cylinder 10 Cylinder 11 Execution of Original CaS Cylinder 12 8 6 4 Execution of Geons Figure2 10: Set of cylinders used to stop Augmented from over 0 segmenting CaS Element Decomposable 4. 60 210 410 610 853 Collection size EXPERIMENTAL EVALUATION After completing the approach implementation, it was necFigure 9: Decomposition fluxogram of geonsfor augessary to verify the efficiency and effectiveness of the algoFigure 8. Decomposition fluxogram mented CaS andGraphic refine the approach. So, several exeFigure 9. Execution for tests bothwere Figurerithm 11: with times the results ofap-both Geons-Augmented CaS. ap- regarding collection size proachesproaches time test 700 5.2 Memory requirements m performance to Figure tests 8with usersthewhere it geontests is found. represents decomposition flux600 CaS A similar study was performed to the memoryOriginal requirements, sample group of twenty human beings. ogram for the Geons-augmented CaS. The process is sim500 as shown in Figure 12 it is used more memory on the geons 400 ilar to the one described in previous section and illustrated 300 than on the original CaS. This happens beaugmented CaS in Figure 6. The main difference lays after the first comGeons NUAL SEGMENTATION TEST USING 200 parison. If the minimal triangle count of the child nodes cause it is used more lists in order to reduceAugmented the execution 100 CaS is above the minimum triangle count predefined, then segtime. The memory is now a days a cheap resource and has 0 are compared the setbeing of geons. This is donebeen by was used to ments understand thewith human inter60 the 210 years. 410 610 having 853 increased over So, to spend more the signaturehow of thehuman segment beings with each precomf an object,comparing more precisely, Executed memory but as a result we getTesta approach faster and with puted geon signature. if it is not similar, e objects. To execute this testThen, collection used de-it proceeds better results to the users is a good trade off between this as the previous description, that is, it executes composed by objects of the Engineering Shape the K-WR two important measures. the case of being similar to any of the geons, Figure 10. Memory requirements for both Figure 12: Graphic with the results ofap-both ap(ESB) andsearch. whereIn randomly chosen. Where it then the segment is labelled as not decomposable. proaches wrt collection size. proaches memory tests e to conclude that familar objects are easier to Memory (MB) these objects can helps to stop the segmentation when a 4 Experimental Evaluation 6. CAS EVALUATION WITH USERS 4 2 0 60 210 410 610 853 Execution of Geons Augmented CaS Amount of user choices In order to prove the resutls quality, it was performed a test To validate and evaluate the proposed approach implemen6.0.1users Original CaShad versus Geons-augmented that were developed by implementing both approaches. ItCaS with where they to compare pairs of results. tation, we verified the efficiency and effectiveness of the this information it was possible to refine the apwas used of objects with different of of the The users werecollections asked first to compare theamounts results Thus, teststhe weresimilarity organized, from peralso make italgorithm. automatic byseveral defining objects. It is possible to conclude by observing Figure 9original geons augmented with the ones produced by the formance tests to tests with users which involved a sample count thresholds. In order to accomplish that, that the time has a linear growing and comparatively, the group of twenty people. CaS. On this test the results produced by Geons-augmented of the manual segmentation were compared to geon-augmented CaS presents better results than the origiCaS approach proved to be more meaningful to the user 4.1 the Manual Segmentation Tests produced by Geons-augmented CaS using nal CaS. It was also possible to observe that the signatures as is shown on Figure 13 where most of user chosen both resholds byThis comparing the tonumber of the segments computation is time consuming and is where most of the test was used understand human interpretaresults or the CaS time is spent. approaches. As shown in Figure 14 the tion of antoobject, more precisely, ng a classification the results. The how test humans that segment segmentation result os object 18 produced by the original the objects. thatthe endresult we used a small ave the better results To was that usedset of ran4.3 Memory requirements CaS approach have three more segments than the results objects of the Engineering Shape Benchty thresholddomly valuechosen equals to 0.58 and the similar A similar study was performed to the require- result shown on Figure 15 that represents thememory segmentation mark (ESB) [S.Jayanti 06]. A preliminary conclusion we 1. ments, as shown in Figure 10 it is used more memory on These made from this test was that familiar objects are easierofto object 18 using Geons-augmented CaS approach. the geons augmented CaS than on the original CaS. This decompose than those people see for the first time. Other three more segments produce an over-segmentation for the is used more lists in order to reduce the cution Time conclusion was that users segment objects consistently. user so,happens this isbecause one ofit the objects that all users have chosen execution time. The memory is nowadays a cheap resource such conclusions was not the the primary the Geons-augmented CaS f execution But wasdraw obtained by executing geons goal of the approach. and has been increased over the years. So, having to spend testsoriginal and further studies should be that made were to validate such CaS and the CaS prototypes more memory but as a result we get a approach faster and observations. by implementig both apporaches. It was used With this is users prove Geons-augmented withinformation better results toitthe is that a goodthe trade off between Based different on the results obtainedofin objects. these tests It it was possiof objects with amounts CaS approach, according to the users, produces better rethese two important measures. refine the approach andthat also make it automatic by o conclude ble by toobserving Figure 11 the time sults then the original CaS approach. 4.4 Evaluation with users defining the similarity and similar count thresholds. In orgrowing and comparatively, the geon augmented der to accomplish that, the results of the manual segmentaTo prove the results quality, it was performed a test with ts better results than the original CaS. It was also 120 tion were compared to the results produced by the Geonsusers where they had to compare pairs of results. observe that the signatures computation is time augmented CaS using different thresholds by comparing 100 were asked first to compare the results of the and is where ofofthe time is The users themost number segments andspent. assigning a classification to Original CaS geons 80 augmented with the ones produced by the original the results. CaS. On this test the results produced by Geons-augmented 12 4.2 Execution time 60 CaS approach proved to be more meaningful toBoth the user as 10 Execution of is shown on Figure 11 where most of user chosen both reThe time of execution was obtained by executing the 8 Original CaS 40 6 sults or the geons augmented approaches but Geons rarely only Geons-augmented CaS and the original CaS prototypes 20 Augmented CaS 0 Collection size Figure 13: Results of comparing original CaS with d 0 CaS 80 60 Both 40 Geons Augmented CaS Amount of user choices 20 Original CaS 7. Amount of user choices of Amount of user choices of S Amount of user choices the Geons-augmented CaS as is shown on Figure 13 approach. where most of user chosen both This analysis allow us to conclude that besides having some segments have chosen or both results or the geon Augmented CaS. As duced results. results or the CaS approaches. As shown in Figure 14 the test that shown in Figure 17 the segmentation os object proGeons-augmen objects where the segmentation is result not the best18for the user, It segmentation result os object 18 produced by the original duced by of thethe the collection manual segmentation has the same result more memory. that used With this information it is prove that the Geons-augmented the majority objects results have been chofer CaS approach have three more segments than the results the shown on Figure 18 that represents the segmentation meaningful res he similar CaS approach, according to the users, producesresult bettersen re-byasthe user as the same or better than the one he chose. ch shown on Figure 15 that represents the segmentation result of object 18 using Geons-augmented CaS approach. sults then the 18 original CaS approach. of object using Geons-augmented CaS approach. These Proving quality approach results. Thisthe is object hasofin the particular nine users choosing both Taking into va ac three more segments produce an over-segmentation for the results, five prefered their results and six have chosen the is necessary ge on user so, this is one of the objects that all users have chosen Geons-augmented CaS approach. other hierarch th 120 the geons from HFP. the Geons-augmented CaS approach. Amout of user choises that were This analysis allow us to conclude that besides having some 100 100where the segmentation is not the best for the user, was used objects It seems also Inp With this information it is prove that the Geons-augmented Original CaS the majority of the collection objects results have been choferent from to th bjects. It CaS approach, according to the users, produces better re80 sen by80 the user as the same or better than the one he chose. characteristics t the time sults then the original CaS approach. sit Proving the quality of the approach results. variant, so it i ugmented Both User 60 60 geons as the o It was also Both 120 the same geon on is time 40 40 Geons Aumented CaS Amout of user choises Geons 100 . Augmented 20 0 In the future [w to be a robust sition of 3D ob 100 80 60 User Both Geons Aumented CaS 7. REFER [1] A. Agath[ Figure 16: Results of comparing Current CaS with 20 11. Users choice of best segmensegmentaFigure Figure 13: Results of comparing original CaS with Figure 13. Users choice of best and P. Az 0 users segmentation tation between original CaS and Geons0 tion between men-made segmentation and methodol Geons Augmented CaS augmented CaS. Design an Geons-augmented CaS. [2] M. Atten[ Figure 16: Results of comparing Current CaS with Figure 13: Results of comparing original CaS with both ap- 20 Geons Augmented CaS 40 users segmentation [3] Figure 14: Object 18 Figure 15: Object 18 uirements, Figure 18: Object 18 [4] Figure 17: Object 18 with a segmentation with15: a segmentation the geons Figure 14: Object 18 Figure Object 18 with a segmentation reFigure 12. Segmentation of an object with the Figure 18: Object 18 with a segmentation 17: Object 18 ppens besegmentation with a segmentation resultwith of athe execuresult of the execu- Figure with a segmentation result of Figure 14. Segmentation of the an execution object original CaSexecu(left) and the geons-augmented segmentation resultwith of athe execuexecution result of the result of the execu[5] tion of the original tion of the Geonssult of the execution of result of the executhe Geons-augmented made humans (left)the and Geons-augmented through geonse and has CaS tion of(right). the original thebymanual tion of the Geons- tion of of the manual CaS approach augmented ap- tion end more CaS approach CaS approach augmented CaS CaS ap- segmentation augmented CaS (right).CaS approach segmentation and with proach proach [6] tween this the original CaS. As shown in Figure 12 the segmentation 6.0.2 User Segmentation versus Geons Augmented 6.1 of Conclusion and Future WorkWe also improved the experimental evaluation. of an Segmentation object produced byversus the original CaS approach 6.0.2result User Geons Augmented 6.1 results Conclusion Future Work We have presented anand algorithm that segments a collection of CaS S time complexity comparatively to thesegments original Addi- [7] has three more segments than the segmentation result using We have 3D objects simultaneously. The algorithm produces CaS. aameanpresented an algorithm that collection of Then it was asked for the users to compare the results promed a test CaS ingful segmentation according to the results of the experitionally, the proposed algorithm avoids over-segmentation Geons-augmented CaS approach. These three more seg- sults. duced by the geons augmented CaS with the objects they 3D objects simultaneously. The algorithm produces a meanThen ments it wasproduce asked for the users to compare thetoresults pro-bymental Also has improved in time and results usingevaluation. geons as primitives. an over-segmentation according user’s ingful segmentation according to the results of the experi[8] ducedperception. by the geons augmented CaS with the objects they comparatively to the original CaS. Finally, the algorithm From these results we conclude that the Geons-augmented CaS approach, according to the users, produces better results than the original CaS approach. Additionally, we asked users to compare the results produced by the geons-augmented CaS with objects manually segmented by humans in a previous test. As shown in Figure 13, half of the users have chosen their results while the other half have chosen both results or the geonsaugmented CaS. Indeed, as shown in Figure 14 the segmentation of an object produced by the the manual segmentation has very similar results when performed with geons-augmented CaS approach. This analysis allow us to conclude that besides having some objects where the segmentation is not the best for the user, the majority of the collection objects results have been chosen by the user as the same or better than the one he chose. We can then conclude that manual segmentation prevails over the automatic segmentation algorithm, but often results are quite similar. 5 Conclusion and Future Work We presented an extension of the CaS algorithm that segments a collection of 3D objects simultaneously in an automatic manner. The algorithm produces a meaningful segmentation regarding human perception, according to the mental evaluation. Also has intest time results avoids over-segmentation usingimproved theingeons. Different tests were performed order to theand efficacy comparatively to the original CaS. Finally, the algorithm and effectiveness of the approach and the quality of the In order to segment the collection of objects, this algorithm avoids over-segmentation using the we geons. produced these have uses the results. similarityFrom between thetests segments that concluded are on the that [9] same collection. the geons-augmented is faster than the original CaS but In order to more segment the collection objects, this algorithm spends memory. It was alsoof clear that the presented The architecture developed is also an important contribuuses solution the similarity between the segments that are on the results that areapplication meaningful for humans. [10] tion. In produces order to make the approach independent sameHowever, collection. we consider that using a basis for the defirst was generated the adapted CaSHFP thatas with the changes has make the approach faster and then with Geons- on composition might be a limitation. Thus, it isthe necessary augmented approach it was overcomed over-segmentation [11] The future architecture developed is also the an important contribuwork to study the possibility of using other hierarlimitation. tion.chical In order tosegmentation make the approach application independent based approaches. first was generated the adapted CaS that with the changes seemsthe alsoapproach promisingfaster to experiment otherwith signature behas It make and then the Geonssides the rotation invariant spherical harmonics shape deaugmented approach it was overcomed the over-segmentation scriptor. Also, as one of the characteristics of these delimitation. scriptors is that are not scale invariant, it is necessary to perform a deeper study on the geons to avoid having to use multiple geons on different scales. In the future we believe that the proposed approach might be improved to develop into a robust, stable and scalable solution for the automatic decomposition of 3D object collections. 6. Acknowledgements The work described in this paper was partially supported by the Portuguese Foundation for Science and Technology (FCT) through the project 3DORuS, reference PTDC/EIAEIA/102930/2008 and by the INESC-ID multiannual fund- Hierarchi primitives M. Atten B. Falcidi shapes fo[ Forum, 27 I. Biederm of human [ 94:115–14 A. Ferreir M. Spagn Thesauru matching A. Golovi [ segmenta (Shape M June 2009 S. Katz, G using feat [ Computer S. Katz a using fuzz ACM SIG [ York, NY M. Morta and J. Ro analysis a Algorithm [ M. Morta geometric Computer G. Reeb. completem [1 [1 ing, through the PIDDAC Program funds. [Mortara 03] M. Mortara, G. Patane, M. Spagnuolo, B. Falcidieno, and J. Rossignac. Blowing bubbles for multi-scale analysis and decomposition of triangle meshes. Algorithmica, 38(1):227–248, 2003. [Mortara 06] M. Mortara, G. Patane, and M. Spagnuolo. From geometric to semantic human body models. Computers & Graphics, 30(2):185–196, 2006. [Shamir 08] A. Shamir. A survey on mesh segmentation techniques. Computer Graphics Forum, 27(6):1539–1556, 2008. [Shapira 08] L. Shapira, A. Shamir, and D. CohenOr. Consistent mesh partitioning and skeletonization using the shape diameter function. The Visual Computer, 24(4):249–259, 2008. [S.Jayanti 06] S.Jayanti, Y. Kalyanaraman, N. Iyer, and K. Ramani. Developing an engineering shape benchmark for cad models. Computer-Aided Design, 38(9):939–953, 2006. [Tierny 07] J. Tierny, J.-P. Vandeborre, and M. Daoudi. Topology driven 3d mesh hierarchical segmentation. In International Conference on Shape Modeling and Applications, pages 215–220, 2007. References [Agathos 07] A. Agathos, I. Pratikakis, S. Perantonis, N. Sapidis, and P. Azariadis. 3d mesh segmentation methodologies for cad applications. Computer-Aided Design and Applications, 4(6):827–841, 2007. [Biederman 87] I. Biederman. Recognition-bycomponents: A theory of human image understanding. Psychological Review, 94:115–147, 1987. [Chen 09] Xiaobai Chen, Aleksey Golovinskiy, and Thomas Funkhouser. A benchmark for 3D mesh segmentation. ACM Transactions on Graphics (Proc. SIGGRAPH), 28(3), August 2009. [Falcidieno 06] M. Atteneand B. Falcidieno and M. Spagnuolo. Hierarchical mesh segmentation based on fitting primitives. Visual Computer, 22(3):181–193, 2006. [Ferreira 09] A. Ferreira, S. Marini, M. Fonseca M. Attene, M. Spagnuolo, J. Jorge, and B. Falcidieno. Thesaurus-based 3d object retrieval with part-in-whole matching. International Journal of Computer Vision, 2009. [Golovinskiy 09] A. Golovinskiy and T. Funkhouser. Consistent segmentation of 3d models. Computers & Graphics, 33(3):262– 269, 2009. [Katz 03] S. Katz and A. Tal. Hierarchical mesh decomposition using fuzzy clustering and cuts. In ACM SIGGRAPH 2003 papers, pages 954–961, NY, USA, 2003. ACM. [Katz 05] S. Katz, G. Leifman, and A. Tal. Mesh segmentation using feature point and core extraction. The Visual Computer, 21(8–10):649–658, 2005. [Kazhdan 03] Michael Kazhdan, Thomas Funkhouser, and Szymon Rusinkiewicz. Rotation invariant spherical harmonic representation of 3d shape descriptors. In Proceedings of the 2003 Eurographics/ACM SIGGRAPH symposium on Geometry processing, SGP ’03, pages 156–164, Aire-la-Ville, Switzerland, Switzerland, 2003. Eurographics Association. [Zuckerberger 02] E. Zuckerberger. Polyhedral surface decomposition with applications. Computers and Graphics, 26(5):733– 743, 2002.
Download