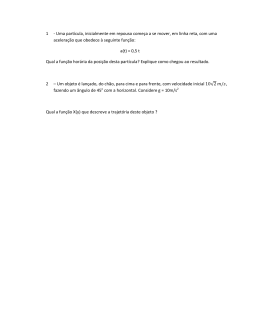
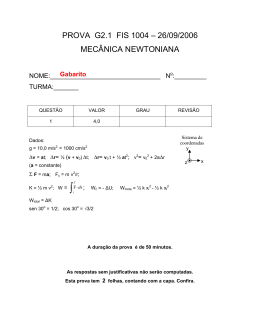
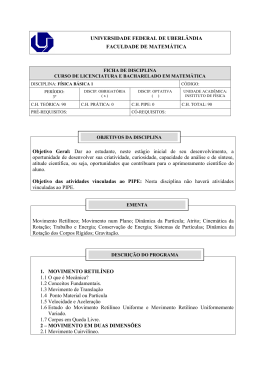
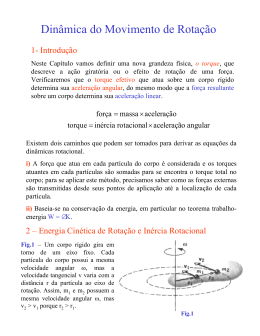
Notas de aula – resumo de mecânica Prof. Robinson RESUMO DE MECÂNICA Prof. Robinson Ano 2014 1 Notas de aula – resumo de mecânica Prof. Robinson 1. DINÂMICA DE UMA PARTÍCULA 1.1. O referencial inercial. O referencial inercial é um sistema de referência que está em repouso ou movimento retilíneo uniforme ao “espaço absoluto”. No entanto, sabemos que não existe espaço absoluto e, portanto, tampouco movimento absoluto, somente existe movimento relativo de um corpo em relação a outro corpo. Desde esse principio, podemos considerar as estrelas fixas como um sistema referencial inercial. Pois, as estrelas fixas não apresentam deslocamento detectável. Nossa experiência do cotidiano diz, porém, que o solo pode ser considerado, em primeira aproximação, como um referencial inercial. Em casos excepcionais podemos, no entanto, observar que a nossa Terra é, na realidade, um sistema referencial não-inercial e as leis de Newton não são estritamente verdadeiras. Isso significa, que para experiências normais vamos sempre supor que os movimentos astronômicos que a Terra realiza, por exemplo a sua rotação, são desprezáveis. Concluindo, qualquer referencial em movimento retilíneo uniforme em relação a um referencial inercial, também é inercial. Outras das conclusões que podemos assumir é que as leis da mecânica são as mesmas em todos os referenciais inerciais. 1.2. Posição de uma partícula. Considere uma partícula descrita baixo um sistema de referencia cartesiano XYZ. onde: , , ãá. 1.3. Deslocamento de uma partícula. 1.4. Velocidade de uma partícula. ∆ = − = − ∙ + − ∙ + − ∙ = 1.5. = ∙ + ∙ + ∙ Aceleração de uma partícula. = = ∙ + ∙ + ∙ = ∙ + ∙ + ∙ 2 Notas de aula – resumo de mecânica 1.6. Prof. Robinson Movimento retilíneo uniformemente variado. As equações são validas para corpos com aceleração constante. Equações úteis: = 1.7. +$∙! As leis de Newton − = − = " ∙ ! + $ ∙ !# # " ∙ ! − $ ∙ !# # " + ! # = # + # ∙ $ − − = # 1ª lei de Newton: A tendência de todo corpo isolado é permanecer em seu estado de equilíbrio em relação ao referencial inercial adotado, exceto se alguma força atuar nesse corpo. 2ª lei de Newton: Se, no corpo de massa m, forem aplicadas forças de intensidades diferentes, serão obtidas acelerações também diferentes, de tal modo que: 3ª lei de Newton: % % %& = = = ' & Quando dois corpos interagem, as forças que cada corpo exerce sobre o outro são sempre iguais mas com sentidos opostos. 1.8. Trabalho e Energia Cinética A energia cinética, simbolizada por EC, é a energia associada ao estado de movimento de um corpo. Quanto mais depressa um corpo se movimenta, maior é a sua energia cinética. Quando um corpo está em repouso sua energia cinética é nula. O valor da energia cinética pode ser determinado pela seguinte equação: () = * 2 Onde * representa a massa do corpo e a sua velocidade em determinado instante. O trabalho da força resultante que atua sobre uma partícula entre duas posições (por exemplo, e ) é igual à variação da energia cinética da partícula entre estas posições. 1.9. Trabalho e Energia Potencial A Energia Potencial é uma forma de energia que pode ser associada com a configuração (ou arranjo) de um sistema de objetos, que exercem forças uns sobre os outros. Se a configuração muda, a energia potencial também pode mudar. Para casos de forças conservativas (forças que dependem da posição da partícula), podemos expressar o trabalho como a diferença de valores de uma quantidade (,, , definidas nos pontos 3 Notas de aula – resumo de mecânica Prof. Robinson inicial e final. Essa quantidade (,, , é conhecida como a energia potencial e é função das coordenadas da partícula. Acrescentamos, se F é uma força conservativa, podemos facilmente deduzir que o trabalho realizado por essa força seria calculada pela equação: 0 - = . % . = (,2 − (,3 1 1.10. Conservação de energia Algumas forças são chamadas de conservativas quando elas não alteram a energia mecânica do corpo ou sistema de corpos sob a ação dessas forças. Neste caso, a energia total do corpo se conserva. Assim: ( = () + (, 1.11. Momento linear de uma partícula 4 = * ∙ 1.12. Rotação (estudar com o livro recomendado pelo professor) 1.13. Relação de variáveis lineares e angulares numa rotação (estudar com o livro recomendado pelo professor) 1.14. Torque da força aplicada em relação a um ponto dado: Quando uma força atua sobre um corpo, este não se move apenas na direção da força; geralmente, também gira ao redor de algum ponto. Isto sugere a definição do torque 5, ou chamado também momento de força. Esta grandeza relaciona a força % que se aplica a um objeto, numa posição definida por , a partir de um ponto definido em um eixo de referencia, produzindo dessa forma um movimento giratório. 1.15. Movimento Angular 5 = × % Momento angular de um ponto material com momento linear 4, em relação ao ponto O, é uma grandeza vetorial definido por: 7 = × 4 = * ∙ × 4 Os componentes do momento angular são calculados a partir dos vetores posição e momento linear: = + + 4 = 48 + 49 + 4: 7 = × 4 = ; ,8 4 ,9 < ,: Notas de aula – resumo de mecânica Prof. Robinson Observações: • • • • =7= = >>>4> sin B = 4 sin B varia em modulo e sentido durante o movimento de uma partícula; Geralmente 7 Se e 4 estão no mesmo plano, a direção 7 é perpendicular a esse plano; Caso especial de movimento circular uniforme de uma partícula com velocidade angular (C , onde os vetores e 4 são perpendiculares, e por tanto: 7 = * = * C 1.16. Relação do Torque e momento angular A taxa de variação do momento angular 7 de uma partícula é igual ao momento da força aplicada à partícula 5 = 7 Esta relação é valida quando 5 7 forem tratados em relação ao mesmo ponto. Observações: • ), então: % = 0 ou % é paralela a . Em ambas situações: Se o torque de uma partícula é zero (5 = 0 = ' 7 O primeiro caso mostra o momento angular constante de uma partícula livre. O segundo caso mostra a ação de uma força central sobre um corpo em movimento, ou seja, o momento angular de uma força central é uma constante de movimento. Exemplo: movimentos planetários. 5 Notas de aula – resumo de mecânica Prof. Robinson 2. DINÂMICA DE UM CORPO SÓLIDO 1.1. Momento angular de um corpo rígido. Considera-se um corpo rígido aquele corpo que conserva sua geometria durante. Com isso, durante sua translação podemos fazer distinção de dois tipos de movimento, um de translação, e outro de rotação. Figura 1: (a) um movimento de um sólido é de translação quando cada uma de suas partículas constituintes descreve o mesmo percurso. Já em uma rotação. Analisemos o movimento de um solido rodando ao redor de um eixo Z, com velocidade angular C. Por exemplo, veja figura do lado, a componente z do F da partícula Ai, na posição , momento angular E G em relação ao ponto “O”, estará dado por: H = * H × H 7 Os vetores H e H são perpendiculares. Portanto, no eixo Z: L 7H: = *H H H cos K − MH N 2 × OH Sendo: H = C 7H: = *H H H sin MH 7H: = * ∙ OH ∙ C A componente z do momento angular total do sólido rodante é: 7: = 7: + 7: + ⋯ + 7H: + ⋯ 7Q: = R 7H: = C ∙ R * ∙ OH Chama-se momento de inércia do sólido em relação ao eixo de rotação z à expressão: Observação • S: = R * ∙ OH O momento angular total 7 não sempre é paralelo ao eixo de rotação. No entanto, existem casos onde 7 é paralelo aos eixos de rotação. Tais eixos são chamados eixos principais de inércia. 6 Notas de aula – resumo de mecânica Prof. Robinson Figura 2: eixos principais de inércia de corpos simétricos. • Caso especial: Quando o eixo de rotação coincide com algum eixo principal de inércia, o momento angular total 7 é: = S ∙ C 7 1.2. Calculo do momento de inércia para um corpo rígido Em relação a um eixo de rotação de sistemas discretos, o momento de inércia é: I = R m ∙ RW Para um sólido rígido o momento de inércia é: I = . R ∙ dm Onde R é a distancia do diferencial dm ao eixo de rotação em analise. Se o corpo rígido for homogêneo dm = ρdv, I = ρ Z R²dv. Observe, a integral depende da geometria: S: = . [² + ² Teorema de Steiner (Ou Teorema dos eixos paralelos) Considere Z um eixo arbitrário que passa por algum furo, e Zc um eixo paralelo que passa através do centro de massa do corpo. Se “d” é a separação entre os dois eixos, o teorema disse que o momento de inércia em relação ao ponto definido pelo furo If é: S\ = S' + * ∙ Exemplo: Calcule o movimento angular de inércia de uma barra fina homogênea em relação a um eixo perpendicular a barra passando através (a) de um extremo (b) centro. 7 Notas de aula – resumo de mecânica Prof. Robinson Solução: (a) Mas ]7 = a e [a = b _ _ S1 = . [ ] = [] . ² = [] ` S1 = _/ Sde = . g_/ [² = Sde = Verificando o teorema de Steiner 1 b7² 3 ` [ 7 & −7 & hi j − i j k 3 2 2 , 7³ 7³ , 7³ l + n= 3 8 8 3 4 1 Sde = b7² 12 S1 = Sde + b² 1 7 4 b7² + b i j = b7² S1 = 12 2 12 1 Sp = b7² 3 8 7³ 3 Notas de aula – resumo de mecânica Prof. Robinson ANEXO 1: MOMENTO DE INÉRCIA DE ALGUNS SÓLIDOS 9 Notas de aula – resumo de mecânica Prof. Robinson ANEXO 2: COMPARAÇÃO ENTRE AS DINÂMICAS DE TRANSLAÇÃO E DE ROTAÇÃO Translação Momento linear Força 4 = * ∙ % = Corpo de massa constante 4 % = * ∙ Energia cinética Potencia 1 (t uçã = * ∙ 2 , = % ∙ Rotação Momento angular 7 = S ∙ C (*) Torque 5 = 7 Corpo de momento de inércia constante 5 = S ∙ qr qs (*) Energia cinética Potencia 1 (t çã = S ∙ C 2 , = 5 ∙ C (*) As formulas marcadas só têm validade para rotações de um eixo principal 10
Download