ET720 – Sistemas de Energia Elétrica I
Capı́tulo 2: Cálculo de fluxo de carga
2.1
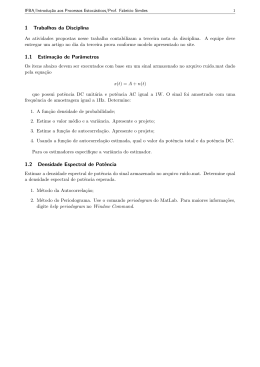
Estrutura geral dos sistemas de potência
Centro de Supervisão e Controle
controle
aquisição de dados
unidade terminal remota (UTR)
c.a.
~
Distribuição
Transmissão
Geração
c.a.
c.a.
medidor
disjuntor
Conversor (inversor)
c.c.
Conversor (retificador)
transformador
~
gerador
– 1–
Carga
2.2
Definição do problema
I Fluxo de carga (FC): obtenção das condições de operação (tensões, fluxos de
potência) de uma rede elétrica em função da sua topologia e dos nı́veis de
demanda e geração de potência.
SISTEMA ELÉTRICO
USINA
15,9 kV
PSfrag replacements
42,7 MW SUBESTAÇÃO 72,2 MW
138,4 kV
15,4 Mvar
12,1 Mvar
3,3 MW
1,0 Mvar
13,4 kV
INDÚSTRIA
I Fluxo de carga: Modelagem dos componentes → obtenção do sistema de
equações e inequações algébricas → métodos de solução → estado de
operação da rede em regime permanente.
ET720
– 2–
I Modelagem é estática → rede representada por um conjunto de equações e
inequações algébricas.
Análise estática: obtém-se o estado de operação da rede em regime
permanente → comportamento dinâmico não é considerado.
2.3
Aplicações
I FC é utilizado tanto no planejamento como na operação de redes elétricas.
I Em geral é parte de um procedimento mais complexo.
I Alguns exemplos:
Operação
análise de segurança: várias contingências (acidentes, distúrbios) são
simuladas e o estado de operação da rede após a contingência deve ser
obtido. Eventuais violações dos limites de operação são detectados e ações
de controle corretivo e/ou preventivo são determinadas.
Planejamento
planejamento da expansão: novas configurações da rede são determinadas
para atender ao aumento da demanda e o estado de operação da rede para
a nova configuração deve ser obtido.
ET720
– 3–
I Ao longo dos anos, vários métodos de solução do FC foram propostos. Para
cada aplicação existem os métodos mais apropriados. Os fatores considerados
na escolha são mostrados nas tabelas a seguir.
Tipos de solução
Precisa Aproximada
Sem controle de limites Com controle de limites
Off-line On-line
Caso simples Casos múltiplos
Propriedades dos métodos de solução do FC
Alta velocidade
especialmente
redes de grandes dimensões
para:
aplicações em tempo real
casos múltiplos
aplicações interativas
Pequeno espaço especialmente
redes de grandes dimensões
de
armazena- para:
mento
computadores
com
pequena
memória
Confiabilidade
especialmente
problemas mal-condicionados
para:
análise de contingências
aplicações em tempo real
Versatilidade
habilidade para incorporação de caracterı́sticas especiais (controle de
limites operacionais, representação
de diversos equipamentos etc.); facilidade de ser usado como parte de
processos mais complexos
Simplicidade
facilidade de manutenção e melhoramento do algoritmo e do programa
ET720
– 4–
I Em geral uma aplicação requer várias caracterı́sticas.
Exemplo: na análise de segurança pode-se necessitar de um método de
solução aproximado, sem controle de limites operacionais, on-line, com
solução de casos múltiplos.
2.4
História
I Network analyzer – painéis em que os equipamentos do sistema eram
emulados através de conjuntos de fontes, resistores, capacitores e indutores
variáveis.
Para redes reais, network analyzers eram enormes (ocupando várias salas),
consumiam muita energia e modificações na rede exigiam alterações na fiação
e ajustes nos valores dos componentes.
Network analyzers foram utilizados antes e também algum tempo depois da
utilização de computadores digitais.
I Primeiro método prático de solução do problema do FC através de um
computador digital → Ward e Hale, 1956 (método baseado na matriz Y)
I Métodos baseados na matriz Y : espaço de armazenamento pequeno
(adequado aos computadores da época), convergência lenta.
I Começo da década de 60: métodos baseados na matriz Z (Gupta e
Davies,1961). Convergência mais confiável, requerem mais espaço de
armazenamento, mais lentos.
I Na mesma época: método de Newton (Van Ness, 1959). Caracterı́sticas de
convergência excelentes. Computacionalmente não era competitivo.
ET720
– 5–
I Meados da década de 60: técnicas de armazenamento compacto e
ordenamento da fatoração (Tinney e Walker, 1967) tornaram o método de
Newton muito mais rápido e exigindo pequeno espaço de memória, mantendo
a caracterı́stica de ótima convergência → método de Newton passou a ser
considerado como o melhor método e foi adotado pela maioria das empresas
de energia elétrica.
I Década de 70: métodos desacoplados (Stott e Alsaç, 1974) baseados no
método de Newton foram propostos → ainda mais rápidos, mantendo precisão
e convergência. Somente em 1990 foi apresentado um estudo teórico
aprofundado das caracterı́sticas dos métodos desacoplados.
I Foram propostos ainda: variações dos métodos desacoplados básicos, métodos
para redes mal-condicionadas, métodos para redes de distribuição (média e
baixa tensões), fluxo de carga da continuação, fluxo de carga ótimo, etc.
ET720
– 6–
2.5
Motivação e idéias gerais
I Considerar o seguinte sistema de potência:
fechado
~
Região em operação
Transmissão
Distribuição
Geração
aberto
Carga
~
ET720
– 7–
I Considerar que:
a função do sistema de geração é produzir a energia elétrica que será
consumida → modelado como uma injeção de potência no barramento
a linha de transmissão é modelada como um circuito RL série,
representando as perdas ôhmicas de potência e a presença de campo
magnético em torno dos condutores
o sistema de distribuição consome a energia transportada pelo sistema de
transmissão → modelado como uma injeção de potência no barramento
I Diagrama unifilar correspondente:
Região em operação
~
Distribuição
Transmissão
Geração
ag replacements
2
1
P1 + j Q 1
E1 = V1 ∠θ1
Geração
ET720
r+jx
P12 + j Q12
Transmissão
P2 + j Q 2
E2 = V2 ∠θ2
Distribuição
– 8–
PSfrag replacements
I Circuito por fase:
r
1
+
−
Geração
I Dados:
I Pede-se:
I
P1
Q1
∼ E1
jx
2
+
P2
Q2
E2
−
Distribuição
Transmissão
V2 =| E2 |= 500 kV
(tensão de linha)
S2 = P2 + j Q2 = 100 + j 0 = 100∠0◦ MVA
r = 25 Ω/fase
x = 125 Ω/fase
(100 MW, 0 Mvar)
V1
S1 = P 1 + j Q 1
Conhecendo essas grandezas, pode-se dizer que o estado de operação da rede
é totalmente conhecido. A partir daı́ outras análises podem ser realizadas.
I Os cálculos serão feitos em pu (por unidade), cuja idéia é muito importante
no caso de circuitos com vários nı́veis de tensão.
I Valores de base:
Sb = 100 MVA
ET720
Vb = 500 kV
– 9–
Conversão dos dados para pu:
E2 = 1∠0◦ pu
S2 = 1∠0◦ pu
25
r=
= 0,01 pu
(Vb2 /Sb)
125
x=
= 0,05 pu
(Vb2 /Sb)
(referência angular)
Corrente pelo circuito:
I=
S2
E2
∗
=
1∠0◦
1∠0◦
∗
= 1∠0◦ pu
Tensão na fonte:
E1 = E2 + I (r + j x)
= 1∠0◦ + 1∠0◦ (0,01 + j 0,05) = 1,0112∠2,8◦ pu
Potência fornecida pela fonte:
S1 = E1I ∗ = 1,0112∠2,8◦ = 1,01 + j 0,05 pu
PSfrag replacements
(101 MW, 5 Mvar)
V1 = 1,0112 pu
V2 = 1 pu
1
2
perdas na transmissão
101 MW
100 MW
5 Mvar
0 Mvar
1 MW
5 Mvar
ET720
– 10–
I Na prática, os dados e incógnitas não são os especificados anteriormente.
I Dados:
S2 = P2 + j Q2 = 100 + j 0 = 100∠0◦ MVA
V1 = 1,0112 pu (*)
(linha)
r = 25 Ω/fase
x = 125 Ω/fase
(100 MW, 0 Mvar)
(*) Tensão na saı́da do transformador elevador na subestação da usina,
mantida constante através de um complexo sistema de controle.
I Pede-se:
V2
S1 = P 1 + j Q 1
I A resolução analı́tica é mais complicada. Pode-se também resolver por
tentativa e erro.
I Resolução analı́tica
Lei das tensões de Kirchhoff:
E1 = E2 + ZI
= E2 + Z (S2 /E2)∗
(×E2∗ )
E1 E2∗ = V22 + ZS2∗
Considerando E1 = V1 ∠0◦ e E2 = V2 ∠θ2 :
V1V2 ∠ − θ2 = V22 + (r + j x) (P2 − j Q2 )
Separando as partes real e imaginária:
V1 V2 cos θ2 = V22 + (rP2 + xQ2)
V1 V2 sen θ2 = (rQ2 − xP2 )
ET720
– 11–
Elevando as duas equações ao quadrado e somando-as, elimina-se θ2 :
V12 V22 = V24 + (rP2 + xQ2)2 + 2V22 (rP2 + xQ2) + (rQ2 − xP2 )2
i
h
2
2
4
2
2
V2 + V2 2 (rP2 + xQ2) − V1 + (rQ2 − xP2) + (rP2 + xQ2) = 0
que pode ser reescrita como:
V24 + bV22 + c = 0
∆ = b2 − 4c
1/2
y1 = −b + ∆
/2
y2 = −b − ∆1/2 /2
n
o
1/2
1/2
V2 = ±y1 , ±y2
Para os dados fornecidos: V2 = {±1, ±0,05} pu.
A resposta esperada é V2 = 1 pu. Então:
θ2 = sen−1 [(rQ2 − xP2) /V1V2 ] = −2,8◦
∗
S2
= 1∠ − 2,8◦ pu
I=
E2
S1 = E1I ∗ = 1,0112∠2,8◦ = 1,01 + j 0,05 pu
(101 MW, 5 Mvar)
→ Mesma solução anterior.
ET720
– 12–
PSfrag replacements
I Interpretação:
As duas soluções negativas não têm significado fı́sico → são desprezadas.
Supor que a potência ativa da carga no barramento 2 seja variável e que a
potência reativa seja nula:
V2 [pu]
operação estável
1
0,8
V2cr
caso base
0,6
0,1
0,4
P2cr
0,2
0
operação instável
0
1
2
3
4
5
6
7
8
9
P2 [pu]
P2cr – máximo carregamento da rede para as condições especificadas.
V2cr – tensão para a qual ocorre o máximo carregamento.
Exercı́cio
(1) Apresentar a curva [V2 × P2 ] completa para o circuito exemplo, considerando
Q2 = 0.
(2) Obter P2cr e V2cr analiticamente e comparar com os valores obtidos através da
análise da curva PV.
(3) Apresentar a curva [V2 × Q2 ] considerando P2 = 0 no mesmo gráfico de (1).
cr
Obter Qcr
2 e V2 analiticamente e comparar com os valores obtidos através da
análise da curva PV.
ET720
– 13–
I Os sistemas elétricos de potência são dinâmicos:
P2
frag replacementsP cr
2
V2cr
t
V2
processo de instabilidade
de tensão que resulta no
COLAPSO DE TENSÃO
t∗
t
→ Modelagem dos aspectos dinâmicos e métodos de resolução especı́ficos são
necessários.
I Para redes maiores:
Resolução por meios
analı́ticos é impossı́vel.
Tentativa e erro?
ET720
– 14–
I Resolução por tentativa e erro
Uma idéia de um procedimento de cálculo iterativo:
(a) Inicializar contador de iterações ν = 0
(b) Escolher E2ν = E20
(c) Calcular a corrente pela carga:
I2ν =
S2
E2ν
∗
(d) Calcular a queda de tensão na linha de transmissão:
∆E ν = (r + j x) I2ν
(e) Calcular a tensão na barra de carga:
E2ν+1 = E1 − ∆E ν = E1 − (r + j x)
S2
E2ν
∗
(f) Incrementar contador de iterações (ν ← ν + 1) e voltar para o passo (c)
Começando com E2 = 1∠0◦ pu tem-se:
Iteração
E2 [pu]
0
1
2
3
4
1+j0
1,0012 − j 0,0500
0,9987 − j 0,0493
0,9987 − j 0,0494
0,9987 − j 0,0494
Solução: E2 = 1∠ − 2,8◦ pu
Na realidade este método iterativo (Gauss) foi o primeiro a ser proposto para
a resolução das equações de fluxo de carga (∼ 1956).
ET720
– 15–
I Resumo:
É necessário o desenvolvimento de técnicas de resolução especı́ficas e
eficientes para o problema da determinação do estado de operação de
redes elétricas em regime permanente
CÁLCULO DE FLUXO DE
CARGA
Fluxo de carga (load flow) = Fluxo de potência (power flow)
É uma ferramenta básica para a análise de redes elétricas
2.6
Representação por fase
I A rede trifásica equilibrada é representada somente por uma das fases →
diagrama unifilar:
Furnas (Campinas)
Tanquinho (138 kV)
Taquaral
42 MVA
x = 21,24%
Tanquinho (69 kV)
Souzas
Barão Geraldo
Itatiba
r = 1,41%
x = 3,68%
b = 0,06%
Nova Aparecida
Trevo (69 kV)
PSfrag replacements
x = 24,26%
x = 28%
Trevo (138 kV)
barramento
Viracopos
ET720
– 16–
I Barramento (barra) – nó do circuito.
I Ramos – linhas de transmissão ou transformadores, que conectam duas barras.
I Dados dos ramos – em % na base 100 MVA e tensão nominal (pu × 100%).
ET720
– 17–
I Para as linhas de transmissão – utiliza-se o modelo π, em que r é a resistência
série, x é a reatância série e b é o carregamento total charging da linha (o
dobro da admitância shunt):
PSfrag replacements
r
jx
j b/2
j b/2
Para a linha Tanquinho-Trevo:
acements Tanquinho
Para a linha do exemplo da Seção
2.5:
PSfrag replacements
Trevo
1
0,0141 j 0,0368
j 0,0003
2
0,01 j 0,05
j 0,0003
I Geração e carga – injeções de potência nas barras.
ET720
– 18–
2.7
Formulação básica do problema de fluxo de carga
I Rede composta por barras e ramos (linhas de transmissão e/ou
transformadores).
I Barras: 4 grandezas básicas: V
θ
P
Q
–
–
–
–
magnitude da tensão nodal
ângulo de fase da tensão nodal
injeção de potência ativa nodal
injeção de potência reativa nodal
2 grandezas são conhecidas e 2 devem ser calculadas. Para a rede exemplo da
Seção 2.5 :
Grandezas Grandezas
Barra conhecidas a calcular
1
V 1 , θ1
P1 , Q 1
2
P2 , Q 2
V 2 , θ2
I As barras são classificadas em:
→ barras de carga (PQ) – são conhecidas as potências ativa e reativa
consumidas. Deve-se calcular a tensão (magnitude e ângulo de fase) →
conhece-se P e Q, calcula-se V e θ.
→ barras de geração (PV) – são conhecidos a potência ativa gerada e a
magnitude da tensão terminal. Deve-se calcular o ângulo da tensão e a
potência reativa gerada (ou consumida) → conhece-se P e V , calcula-se θ e Q.
→ barra(s) de referência (Vθ, também chamadas de slack) – a tensão
(magnitude e ângulo de fase) é conhecida. Deve-se calcular as potências ativa
e reativa → conhece-se V e θ, calcula-se P e Q.
ET720
– 19–
I A barra slack tem duas funções:
Fornecer uma referência angular para a rede (a referência da magnitude de
tensão é o próprio nó terra)
PSfrag replacements
Exemplo
Calcular a potência ativa consumida pela impedância Z2 do circuito a seguir.
Z1 = 4∠90◦ Ω
+ V1 −
+
∼ E
−
V
+
100 V
−
+
V2
−
Z2 = 3∠0◦ Ω
I
Utilizando a medição feita pelo voltı́metro, define-se a tensão da fonte E como:
E = 100∠α V
A corrente pelo circuito é:
I=
E
= 20∠ (α − 53,1◦) A
(Z1 + Z2 )
A potência complexa consumida por Z2 vale:
S2 = V2 · I ∗ = (Z2 · I) · I ∗ = Z2 · | I |2 = 1,2∠0◦ kVA
que resulta em uma potência ativa de 1,2 kW.
ET720
– 20–
Comentários:
→ os fasores de tensão e corrente dependem de α.
→ as defasagens entre os fasores não dependem de α.
→ determinou-se a potência consumida sem que se conhecesse o valor de
α.
→ as potências não dependem dos ângulos de fase das tensões e correntes
e sim das diferenças angulares entre as grandezas.
→ α pode ser escolhido livremente pois não altera os resultados finais.
x
Fechar o balanço de potência da rede, levando em conta as perdas de
transmissão. As perdas de transmissão não são conhecidas a priori, e
devem ser supridas pelas unidades geradoras. Em geral, especifica-se uma
barra da rede que suprirá as perdas.
Exemplo
Considerar
a rede de 3 barras e 3 ramos mostrada a seguir.
PSfrag replacements
20 MW +
P
i
perdas1
perdasi
∼
(slack)
2 100 MW
1
perdas3
perdas2
3
∼
ET720
80 MW
– 21–
Comentários:
→ a barra slack deve fornecer 20 MW adicionais para satisfazer a demanda
na barra 2, pois o gerador da barra 3 entrega somente 80 MW.
→ a barra slack deve fornecer ainda uma quantidade adicional de potência
para suprir as perdas de potência nos ramos.
Exemplo
frag replacements
Relembrando a solução da rede exemplo da Seção 2.5 :
V1 = 1,0112 pu
V2 = 1 pu
1
2
perdas na transmissão
101 MW
100 MW
5 Mvar
0 Mvar
1 MW
5 Mvar
I Outros tipos de barras podem ser definidos, em função de situações de
operação particulares.
ET720
– 22–
Exemplo
Considere a rede a seguir.
1
PSfrag replacements
3
2
4
5
∼
∼
6
7
∼
• Barras 3 e 4: barras de carga (PQ) → P e Q são conhecidos e deve-se
calcular V e θ
• Barras 2 e 6: não têm carga nem geração associados → são consideradas
como barras de carga (PQ) com P = Q = 0
• Barras 1, 5 e 7: conectadas a geradores → barras de geração → em geral P e
V são conhecidos e deve-se calcular θ e Q
• Uma das barras deve desempenhar o papel especial de:
? ser a referência angular da rede (θ especificado)
? permitir o balanço de potência da rede
• Pode-se escolher, por exemplo, a barra 1 como a slack, atribuindo um valor
para θ1. Logo, P1 passa a ser desconhecido.
• As barras 5 e 7 continuam a ser PV.
ET720
– 23–
2.7.1
Formulação nodal – equações de corrente
I Considerar a rede de três barras e três linhas mostrada a seguir.
∼
1
V1 , θ 1
P12 , Q12
∼
V2 , θ 2
r12 , x12
bsh
12
Pc1 , Qc1
r13 , x13
bsh
13
Pg2 , Qg2
Pg1 , Qg1
2
Pc2 , Qc2
P23 , Q23
P13 , Q13
r23 , x23
bsh
23
V3 , θ 3
3
Pc3 , Qc3
I Barras – 1 e 2 (gerador e carga) e 3 (carga)
→ Define-se a injeção lı́quida de potência ativa:
∼
PSfrag replacements k
P1 = Pg1 − Pc1
Pck
P2 = Pg2 − Pc2
P3 = 0 − Pc3
Pgk
Pgk − Pck = Pk
potencia transmitida
pelas linhas
→ o mesmo vale para potência reativa.
ET720
– 24–
→ o mesmo vale para as correntes – injeção lı́quida de corrente:
I1 = Ig1 − Ic1
I2 = Ig2 − Ic2
I3 = 0 − Ic3
I Três linhas de transmissão conectando as barras.
→ Linhas representadas pelos seus modelos π nominais.
→ impedância série z12 = r12 + jx12
→ admitância série:
1
−x12
r12
y12 =
+
j
= g12 + jb12 = 2
PSfrag replacements
2 + x2
z12
r12 + x212
r12
12
→ admitância shunt jbsh
12
I Levando em conta as definições anteriores tem-se o circuito equivalente da
rede por fase em pu:
I1
1
I2
V1 , θ 1
y12
I13
I12
V2 , θ 2
2
I23
sh
j bsh
12 j b23
sh
j bsh
13 j b12
y13
y23
V3 , θ 3
3
I3
j bsh
13
ET720
j bsh
23
– 25–
I Aplicando a lei das correntes de Kirchhoff para o nó 1:
→ a injeção de corrente I1 entrando na barra se distribui pelas linhas 1-2 e 1-3.
→ as correntes pelas linhas, por sua vez, têm duas componentes, uma pela
admitância série e outra pela admitância shunt.
I1 = I12 + I13
= y12 (E1 − E2 ) + jbsh
E1 + y13 (E1 − E3) + jbsh
1
12
13 E}
|
{z
} |
{z
I12
I13
sh
I1 = y12 + y13 + jbsh
+
jb
12
13 E1 + (−y12 ) E2 + (−y13 ) E3
em que Ej = Vj ∠θj , j = 1, . . . , 3.
I Realizando o mesmo procedimento para as demais barras, obtém-se o
seguinte sistema de equações:
sh
I1 = y12 + y13 + jbsh
+
jb
12
13 E1 + (−y12 ) E2 + (−y13 ) E3
sh
I2 = (−y12) E1 + y12 + y23 + jbsh
12 + jb23 E2 + (−y23 ) E3
sh
I3 = (−y13) E1 + (−y23 ) E2 + y13 + y23 + jbsh
+
jb
13
23 E3
I Na forma matricial:
sh
E1
−y12
−y13
I1
y12 + y13 + jbsh
12 + jb13
sh
· E2
I2 =
−y12
y12 + y23 + jbsh
−y23
12 + jb23
sh
sh
E3
I3
−y13
−y23
y13 + y23 + jb13 + jb23
ET720
– 26–
ou:
I =Y·E
em que I é o vetor de injeções nodais de corrente (n × 1), E é o vetor das
tensões nodais (n × 1) e Y é a matriz admitância nodal (n × n). n é o número
de barras da rede.
I De acordo com os resultados obtidos obtém-se uma regra para a formação da
matriz Y:
elementos fora da diagonal – o negativo da admitância série:
Ykm = −ykm
elementos da diagonal – soma das admitâncias conectadas à barra:
P
Ykk = m∈Ωk ykm + jbsh
km
em que Ωk é o conjunto formado pelas barras vizinhas da barra k.
I A matriz Y pode ser colocada na seguinte forma:
Y = <{Y} + j={Y} = G + jB
em que G é a matriz condutância nodal e B é a matriz susceptância nodal.
Logo:
I = (G + jB) · E
ET720
– 27–
em que:
g12 + g13
−g12
−g13
G = −g12
g12 + g23
−g23
−g13
−g23
g13 + g23
e
sh
b12 + b13 + bsh
+
b
−b
−b
12
13
12
13
sh
sh
−b23
B=
−b12
b12 + b23 + b12 + b23
sh
−b13
−b23
b13 + b23 + bsh
13 + b23
Exemplo
Para a rede da seção 2.5 :
PSfrag replacements
1
2
r
jx
z = r + jx = 0,01 + j0,05 = 0,051∠78,69◦ pu
y = z −1 =
Y=
1
= 19,6116∠ − 78,69◦ = 3,8462 − j19,2308 pu = g + jb
◦
0,051∠78,69
y −y
−y
y
=⇒
3,8462 −3,8462
G = < {Y} =
−3,8462 3,8462
−19,2308 19,2308
B = = {Y} =
19,2308 −19,2308
ET720
– 28–
PSfrag replacements
2.7.2
Formulação nodal – equações de potência
I Na prática são especificadas as injeções de potência (P e Q) e não as
correntes.
I Da equação das correntes:
I =Y·E
I1
I2
..
.
Ik
..
.
In
=
Yk1 Yk2 · · · Ykk · · · Ykn
E1
E2
..
.
Ek
..
.
En
Logo:
Ik = Yk1E1 + Yk2 E2 + · · · + Ykk Ek + · · · + Ykn Ekn
X
X
= Ykk Ek +
Ykm Em =
Ykm Em
m∈Ωk
m∈K
em que K é o conjunto formado pela barra k e suas vizinhas (K ← Ωk ∪ k).
ET720
– 29–
Exemplo
PSfrag replacements
1
3
8
n
k
De acordo com a regra de formação da matriz admitância:
Yk1 , Yk3, Yk8, Ykn , Ykk 6= 0
e os demais Ykj = 0. Portanto:
Ik = Yk1 E1 + Yk3 E3 + Yk8 E8 + Ykn En + Ykk Ekk
I Para uma barra k:
Sk = Pk + jQk = Ek Ik∗
Logo:
Sk∗
= Pk − jQk =
Ek∗ Ik
=
Ek∗
X
Ykm Em
m∈K
ET720
– 30–
I Lembrando que Ek = Vk ∠θk e Em = Vm ∠θm :
Pk − jQk = Ek∗
X
Ykm Em
m∈K
= Vk ∠ (−θk )
= Vk
X
X
(Gkm + jBkm ) Vm ∠θm
m∈K
Vm (Gkm + jBkm ) e−j(θk −θm )
m∈K
= Vk
X
Vm (Gkm + jBkm ) e−jθkm
m∈K
= Vk
X
Vm (Gkm + jBkm ) · (cos θkm − j sen θkm)
m∈K
Pk = V k
X
Vm (Gkm cos θkm + Bkm sen θkm)
m∈K
Qk = Vk
X
Vm (Gkm sen θkm − Bkm cos θkm)
m∈K
que são as equações das potências nodais → 2 equações para cada barra.
ET720
– 31–
Exemplo
Considerar a rede de 2 barras da Seção 2.5 :
Geração (slack)
PSfrag replacements
Carga (PQ)
1
2
r
jx
Em princı́pio tem-se 2 equações para cada barra, ou seja, um total de 4 equações:
P1 = V 1
X
Vm (G1m cos θ1m + B1m sen θ1m)
m∈K1
=
V12G11
+ V1
X
Vm (G1m cos θ1m + B1m sen θ1m)
m∈Ω1
P1 = V12G11 + V1 V2 (G12 cos θ12 + B12 sen θ12)
X
Q1 = V1
Vm (G1m sen θ1m − B1m cos θ1m)
m∈K1
= −V12B11 + V1
X
Vm (G1m sen θ1m − B1m cos θ1m)
m∈Ω1
Q1 = −V12B11 + V1 V2 (G12 sen θ12 − B12 cos θ12)
ET720
– 32–
P2 = V 2
X
Vm (G2m cos θ2m + B2m sen θ2m)
m∈K2
=
V22G22
+ V2
X
Vm (G2m cos θ2m + B2m sen θ2m)
m∈Ω2
P2 = V22G22 + V2 V1 (G21 cos θ21 + B21 sen θ21)
X
Q2 = V2
Vm (G2m sen θ2m − B2m cos θ2m)
m∈K2
= −V22B22 + V2
X
Vm (G2m sen θ2m − B2m cos θ2m)
m∈Ω2
Q2 = −V22B22 + V2 V1 (G21 sen θ21 − B21 cos θ21)
Exemplo
Considerar a rede de 3 barras a seguir.
Geração (slack )
Geração (PV)
∼
∼
2
1
PSfrag replacements
3
Carga (PQ)
ET720
– 33–
Em princı́pio tem-se 2 equações para cada barra, ou seja, um total de 6 equações:
P1 = V 1
X
Vm (G1m cos θ1m + B1m sen θ1m)
m∈K1
P1 = V12 G11 + V1 V2 (G12 cos θ12 + B12 sen θ12) + V1 V3 (G13 cos θ13 + B13 sen θ13)
Q1 = V1
X
Vm (G1m sen θ1m − B1m cos θ1m)
m∈K1
Q1 = −V12 B11 + V1 V2 (G12 sen θ12 − B12 cos θ12) + V1 V3 (G13 sen θ13 − B13 cos θ13)
Obtenha as equações para P2 , Q2, P3 e Q3 .
2.7.3
Idéia geral dos métodos de resolução
I A idéia básica é obter as 4 grandezas (P , Q, V e θ) para todas barras da rede.
→ Supor que sejam conhecidas todas as potências (P e Q) de todas as barras.
→ A idéia é determinar todas as tensões (V e θ) de forma que satisfaçam as
equações das potências nodais.
Exercı́cio
Considerar a rede de 2 barras da Seção 2.5 . Verificar que as equações das
potências nodais são satisfeitas para a solução encontrada (E1 = 1,0112∠0◦ pu,
E2 = 1∠ − 2,8◦ pu, S1 = 101 + j5 MVA, S2 = 100 + j0 MVA).
ET720
– 34–
I Uma idéia para a resolução do problema:
→ Arbitrar tensões e testar se satisfazem as equações das potências nodais.
→ Se satisfizerem → solução do problema foi encontrada.
→ Se não satisfizerem → alterar as tensões e repetir o processo.
I Na Seção 2.5 foi mostrado um procedimento que segue esta idéia geral
(método de Gauss).
I Primeiro problema: como alterar as tensões convenientemente a fim de
sempre caminhar em direção à solução correta?
Segundo problema: não se conhece todas as potências → existem diferentes
tipos de barras e para cada tipo existem valores fornecidos e valores a serem
calculados.
I Procedimento geral de resolução do problema de fluxo de carga:
Tomar as equações de Pk para as barras dos tipos PQ (carga) e PV
(geração), para as quais existem valores especificados de Pk .
Tomar as equações de Qk para as barras do tipo PQ (carga), para as quais
existem valores especificados de Qk .
Supor que existam NPQ barras do tipo PQ e NPV barras do tipo PV.
Tem-se (NPQ + NPV) equações de Pk e NPQ equações de Qk . O total de
equações é (2NPQ + NPV).
As incógnitas são Vk e θk para as barras PQ e θk para as barras PV. O total
de incógnitas é também igual a (2NPQ + NPV).
Tem-se um sistema de (2NPQ + NPV) equações algébricas não-lineares e
mesmo número de incógnitas.
ET720
– 35–
Obter as incógnitas por algum método (que será mostrado adiante).
Calcular Pk para a barra de referência e Qk para a barra de referência e
barras PV.
Exemplo
Descreva o procedimento de cálculo de fluxo de carga para a rede de 2 barras da
Seção 2.5 , mostrada a seguir.
Geração (slack)
PSfrag replacements
Carga (PQ)
1
2
r
jx
• Equações das potências nodais:
P1 = V 1
X
Vm (G1m cos θ1m + B1m sen θ1m)
m∈K1
Q1 = V1
X
Vm (G1m sen θ1m − B1m cos θ1m)
m∈K1
P2 = V 2
X
Vm (G2m cos θ2m + B2m sen θ2m)
m∈K2
Q2 = V2
X
Vm (G2m sen θ2m − B2m cos θ2m)
m∈K2
• Tomar P2 = . . ., pois P2 é especificado.
Tomar Q2 = . . ., pois Q2 é especificado.
ET720
– 36–
• NPQ = 1 e NPV = 0 → o número de equações é igual a 2 NPQ + NPV = 2.
As incógnitas são V2 e θ2 → 2 incógnitas.
• Equações de fluxo de carga:
∆P2 = P2esp − P2calc = P2esp − V2
X
Vm (G2m cos θ2m + B2m sen θ2m) = 0
m∈K2
∆Q2 =
Qesp
2
−
Qcalc
2
=
Qesp
2
− V2
X
Vm (G2m sen θ2m − B2m cos θ2m) = 0
m∈K2
• Resolver as equações de fluxo de carga, obtendo V2 e θ2 .
• Calcular P1 e Q1 .
Exercı́cio
Descreva o procedimento de cálculo de fluxo de carga para a rede de 3 barras
mostrada a seguir.
Geração (slack )
Geração (PV)
∼
∼
1
2
PSfrag replacements
3
Carga (PQ)
ET720
– 37–
2.8
Métodos de solução
I Através de algum método determina-se as tensões desconhecidas (magnitude
e/ou fase).
I As equações das potências nodais são:
Pk = V k
X
Vm (Gkm cos θkm + Bkm sen θkm )
k = {barra PQ ou PV}
Vm (Gkm sen θkm − Bkm cos θkm )
k = {barra PQ}
m∈K
Qk = Vk
X
m∈K
Tem-se portanto (NPQ + NPV) equações de potência ativa e NPQ equações
de potência reativa.
I Supor que sejam arbitrados os valores das tensões desconhecidas (V e θ). A
partir das equações das potências nodais pode-se calcular:
Pkcal = Pk (V , θ)
Qcal
k = Qk (V , θ)
k = {barra PQ ou PV}
k = {barra PQ}
I No entanto, os valores de Pk e Qk dessas barras são conhecidos (dados do
problema) e valem Pkesp e Qesp
k .
I Se os valores de tensão arbitrados estiverem errados (o que é provável),
pode-se estimar o erro resultante da escolha desses valores:
∆Pk = Pkesp − Pkcal
cal
∆Qk = Qesp
k − Qk
ET720
k = {barra PQ ou PV}
k = {barra PQ}
– 38–
em que ∆Pk e ∆Qk são chamados de erros de potência, resı́duos de potência,
ou mismatches de potência (denominação mais comum).
Se os valores das tensões arbitrados corresponderem à solução exata do
problema tem-se mismatches de potência nulos:
∆Pk = 0
∆Qk = 0
k = {barra PQ ou PV}
k = {barra PQ}
I As chamadas equações de fluxo de carga são:
∆Pk = Pkesp − Pkcal = 0
cal
∆Qk = Qesp
k − Qk = 0
k = {barra PQ ou PV}
k = {barra PQ}
que podem ser escritas de maneira geral como:
g (x) = 0
em que o vetor g é o vetor dos mismatches de potência e x é o vetor das
incógnitas (magnitudes e ângulos de fase das tensões).
I A solução xs faz as funções g se anularem → g (xs ) = 0.
Os métodos de solução consistem na obtenção de xs que anula g
(mismatches).
ET720
– 39–
2.8.1
Método de Newton
Equação algébrica não-linear
I Considere a equação algébrica não-linear:
g (x) = 0
que é um caso particular (unidimensional) de um sistema de equações
algébricas não-lineares (n-dimensional).
I Pretende-se determinar o valor de x para o qual a função g (x) se anula. Em
termos geométricos a solução da equação acima corresponde ao ponto xs em
que a curva g(x) corta o eixo horizontal x:
g (x)
PSfrag replacements
xs
ET720
x0
x
– 40–
I A resolução do problema pelo método de Newton resulta em um processo
iterativo cujos passos serão detalhados a seguir:
(1) Inicializar contador de iterações ν = 0 e escolher um ponto inicial
x = x(ν) = x(0) .
(2) Calcular o valor da função g (x) no ponto x = x(ν) → g x(ν) .
(3) Comparar o valor calculado g x(ν) com uma tolerância especficada ε.
Se | g x(ν) |≤ ε, então x = x(ν) será a solução procurada dentro da faixa
de tolerância ±ε.
Se | g x(ν) |> ε, prosseguir com a execução do processo iterativo.
g (x)
g x(0)
PSfrag replacements
+ε
−ε
x
xs
x(0)
(4) Linearizar a função g (x) em torno do ponto x(ν) , g x(ν) por intermédio
da série de Taylor desprezando os termos de ordem superior a 2:
d (ν) (ν)
0
(ν)
(ν)
+ g x
∆x(ν)
≈g x
g x + ∆x
+g x
∆x = g x
dt
Este passo se resume de fato ao cálculo da derivada g 0 x(ν) .
ET720
(ν)
(ν)
(ν)
– 41–
(5) Resolver o problema linearizado, ou seja, encontrar ∆x(ν) tal que:
g x
(ν)
+g
0
x
(ν)
∆x(ν) = 0
ou:
∆x(ν)
x(ν+1) − x(ν)
x(ν+1)
g x(ν)
= − 0 (ν) g x
g x(ν)
= − 0 (ν) g x
(ν)
g
x
= x(ν) − 0 (ν) g x
g (x)
g x(0)
PSfrag replacements
+ε
−ε
x
xs
x(1)
x(0)
(6) Fazer ν + 1 → ν e voltar para o passo (2).
ET720
– 42–
I Uma visão geral do procedimento é mostrada a seguir.
g (x)
PSfrag replacements
g x(0)
g x(1)
g x(2)
+ε
−ε
x
xs x
(3)
(2)
x
x(1)
solução
x(0)
I Uma variação do método acima é obtida considerando-se a derivada
constante (Von Mises), ou seja, ela é calculada somente uma vez no ponto
x(0) e utilizada em todas as iterações:
PSfrag replacements
g (x)
g x(0)
g x(1)
g x(2) g x(3)
+ε
−ε
ET720
x
xs
x(3)x(2) x(1)
x(0)
– 43–
I O número de iterações é maior que no método original.
Cada iteração é mais rápida pois a derivada não precisa ser calculada a cada
passo (esse fato ficará mais claro quando for tratado o caso multidimensional).
Sistema de equações algébricas não-lineares
I Considere agora o caso de um sistema n-dimensional de equações algébricas
não-lineares:
g1 (x1, x2, · · · , xn) = 0
g2 (x1, x2, · · · , xn) = 0
g3 (x1, x2, · · · , xn) = 0
..
.
gn (x1, x2, · · · , xn) = 0
ou:
g (x) = 0
em que g (funções) e x (incógnitas) são vetores (n × 1):
g (x) = [g1 (x)
g2 (x)
···
T
x = [x1
x2
· · · xn ]
gn (x)]T
I Os passos do processo iterativo de resolução para o caso n-dimensional são
basicamente os mesmos do caso unidimensional. A diferença está no passo
(4) onde, ao invés da derivada de uma função, aparece a matriz Jacobiana.
ET720
– 44–
I A linearização de g (x) em torno de x = x(ν) é dada por:
g1 x
(ν)
(ν)
+ ∆x
≈ g1 x
(ν)
(ν)
(ν)
+ ∂g1/∂x1|x(ν) ∆x1 + ∂g1/∂x2|x(ν) ∆x2 + · · · +
∂g1/∂xn|x(ν) ∆x(ν)
n
(ν)
(ν)
g2 x(ν) + ∆x(ν) ≈ g2 x(ν) + ∂g2/∂x1|x(ν) ∆x1 + ∂g2/∂x2|x(ν) ∆x2 + · · · +
∂g2/∂xn|x(ν) ∆x(ν)
n
..
.
(ν)
(ν)
(ν)
(ν)
(ν)
+ ∂gn/∂x1|x(ν) ∆x1 + ∂gn/∂x2|x(ν) ∆x2 + · · · +
≈ gn x
gn x + ∆x
∂gn /∂xn|x(ν) ∆x(ν)
n
Logo:
g x
(ν)
+ ∆x
(ν)
≈g x
(ν)
(ν)
+J x
∆x(ν)
sendo a matriz Jacobiana J dada por:
J x
(ν)
∂
∂x1 g1
∂
g
∂x1 2
∂ (ν)
g x
=
=
∂x
...
∂
∂x1 gn
∂
∂x2 g1
∂
g
∂x2 2
...
∂
∂x2 gn
...
...
...
...
∂
∂xn g1
∂
g
∂xn 2
...
∂
∂xn gn
x(ν)
O vetor de correção das incógnitas ∆x é calculado impondo-se:
(ν)
g x
ET720
+J x
(ν)
∆x(ν) = 0
– 45–
I Caso particular em que n = 2:
∂
(ν) (ν)
(ν)
PSfrag replacements
g1 [(x1 + ∆x1) , (x2 + ∆x2)] ≈ g1 x1 , x2 +
g1 ∆x1 +
∂x1
∂
(ν)
(ν) (ν)
g2 ∆x1 +
g2 [(x1 + ∆x1) , (x2 + ∆x2)] ≈ g2 x1 , x2 +
∂x1
∂
(ν)
g1 ∆x2
∂x2
∂
(ν)
g2 ∆x2
∂x2
e:
g1
g2
(ν)
(ν)
x1 , x2
(ν)
(ν)
x1 , x2
+
∂
∂x1 g1
∂
g
∂x2 1
∆x1
∂
∂x1 g2
∂
∂x2 g2
(ν)
∆x2
(ν)
0
=
0
matriz Jacobiana
I Algoritmo para a resolução do sistema de equações g (x) = 0 pelo método de
Newton:
(1) Inicializar contador de iterações ν = 0 e escolher um ponto inicial
x = x(ν) = x(0) .
(2) Calcular o valor da função g (x) no ponto x = x(ν) → g x(ν) .
(3) Testar convergência:
Se | gi x(ν) |≤ ε para i = 1, · · · , n, então x = x(ν) será a solução procurada
dentro da faixa de tolerância ±ε e o processo convergiu.
Caso contrário, prosseguir com a execução do algoritmo.
(4) Calcular a matriz Jacobiana J x(ν) .
ET720
– 46–
(5) Determinar o novo ponto x(ν+1) :
∆x
(ν)
= −J
−1
x
(ν)
g x
x(ν+1) = x(ν) + ∆x(ν)
(ν)
(6) Fazer ν + 1 → ν e voltar para o passo (2).
I Idéia geral da evolução do processo iterativo (para n = 2):
x1
g1
0
0
1
lacements
2
3
1
g2
2
3
x2
ET720
– 47–
Problema de fluxo de carga
I No método de Newton para a resolução do sistema de equações g (x) = 0, o
ponto central consiste em determinar o vetor de correção ∆x através de:
g (xν ) = −J (xν ) ∆xν
I Para o problema de fluxo de carga tem-se:
g (xν ) =
∆P ν
∆Qν
ν
∆x =
=
P esp − P calc
Qesp − Qcalc
∆θν
∆V ν
∂ (∆P ) ∂ (∆P )
ν
} NPQ + NPV
} NPQ
} NPQ + NPV
} NPQ
(ν)
∂V
∂θ
J (xν ) = ∂ ∆
( Q) ∂ (∆Q)
∂V
∂θ
|{z}
|{z}
} NPQ + NPV
} NPQ
NPQ + NPV NPQ
I Lembrando das equações dos mismatches (cujas derivadas aparecem na
matriz Jacobiana) e de que os valores especificados das potências são
constantes∗ , pode-se escrever:
J (xν ) = −
ET720
∂ (P )
∂ (P )
∂θ
∂ (Q)
∂V
∂ (Q)
∂θ
∂V
(ν)
(∗)
calc
esp
(V , θ)
∆P = P
|{z} −P
↓
constante → derivada nula
– 48–
I As submatrizes que compõem a matriz Jacobiana são geralmente
representadas por:
∂ (P )
∂θ
∂ (Q)
M=
∂θ
∂ (P )
∂V
∂ (Q)
L=
∂V
H=
N=
As expressões para os elementos das matrizes H, M, N e L são deduzidas a
partir das expressões básicas de fluxo de potência (expressões de Pk e Qk ).
I Finalmente as equações podem ser colocadas na forma:
∆P ν
∆Qν
=
H N
M L
(ν) ∆θ ν
∆V ν
Exemplo
Considerar a rede de 2 barras da Seção 2.5 :
Geração (slack)
PSfrag replacements
Carga (PQ)
1
2
r
jx
As equações a serem resolvidas neste caso são:
ET720
∆P2
∆Q2
=
H22 N22
M22 L22
∆θ2
∆V2
– 49–
∂
∂ V2 V1 (G21 cos θ21 + B21 sen θ21) + V22 G22
P2 =
∂θ2
∂θ2
= −V2V1 (G21 sen θ21 − B21 cos θ21) +V22 B22 −V22 B22
|
{z
}
H22 =
−Q2
= −Q2 −
V22 B22
∂
P2
∂V2
= V1 (G21 cos θ21 + B21 sen θ21) + 2V2G22
= P2 + V22 G22 /V2
N22 =
× (V2 /V2)
∂
∂ Q2 =
V2 V1 (G21 sen θ21 − B21 cos θ21) − V22 B22
∂θ2
∂θ2
= V2V1 (G21 cos θ21 + B21 sen θ21) +V22G22 −V22 G22
|
{z
}
M22 =
P2
= P2 −
V22 G22
∂
Q2
∂V2
= V1 (G21 sen θ21 − B21 cos θ21) − 2V2 B22
= Q2 − V22 B22 /V2
L22 =
× (V2 /V2 )
I Dedução das expressões dos elementos da matriz H:
A expressão da potência ativa em uma barra k é:
Pk = V k
=
X
m∈K
2
Gkk Vkk
Vm (Gkm cos θkm + Bkm sen θkm )
+ Vk
X
Vm (Gkm cos θkm + Bkm sen θkm)
m∈Ωk
ET720
– 50–
A segunda equação corresponde a uma separação dos termos correspondentes
à própria barra k. Logo, a somatória contém agora somente as barras vizinhas
da barra k.
Elemento fora da diagonal k-m – derivada da potência Pk em relação ao
ângulo de uma certa barra vizinha m:
Hkm =
∂
Pk = Vk Vm (Gkm sen θkm − Bkm cos θkm)
∂θm
Elemento fora da diagonal m-k – derivada da potência Pm em relação ao
ângulo de uma certa barra vizinha k – basta inverter os ı́ndices k e m da
expressão de Hkm :
Hmk =
∂
Pm = Vm Vk (Gmk sen θmk − Bmk cos θmk )
∂θk
Como:
Gmk = Gkm
Bmk = Bkm
θmk = −θkm
tem-se finalmente:
Hmk = −Vk Vm (Gkm sen θkm + Bkm cos θkm)
Elemento da diagonal k-k:
Hkk
X
∂
Pk = −Vk
Vm (Gkm sen θkm − Bkm cos θkm)
=
∂θk
m∈Ωk
ET720
– 51–
Somando e subtraindo Bkk Vk2 :
Hkk =
−Bkk Vk2
+
Bkk Vk2
− Vk
X
Vm (Gkm sen θkm − Bkm cos θkm)
m∈Ωk
= −Bkk Vk2 − Vk Vk
Vk
X
!
Gkk |sen{zθkk} −Bkk |cos{zθkk}
=0
=1
−
Vm (Gkm sen θkm − Bkm cos θkm )
m∈Ωk
Incluindo a barra k na somatória:
Hkk = −Bkk Vk2 − Vk
|
= −Bkk Vk2 − Qk
X
m∈K
Vm (Gkm sen θkm − Bkm cos θkm )
{z
=Qk
}
A expressão em termos da potência é mais simples mais econômica em
termos de cálculo, pois aproveita o valor da potência que já foi calculado
anteriormente (este fato ficará mais claro quando for apresentado o algoritmo
de solução do fluxo de carga).
Resumindo:
Hkk =
Hkm =
Hmk =
ET720
∂
∂θk Pk
∂
∂θm Pk
∂
P
∂θk m
=
=
=
=
P
−Bkk Vk2 − Vk m∈K Vm (Gkm sen θkm − Bkm cos θkm)
−Bkk Vk2 − Qk
Vk Vm (Gkm sen θkm − Bkm cos θkm )
−Vk Vm (Gkm sen θkm + Bkm cos θkm )
– 52–
Os elementos das demais matrizes são:
Nkk =
∂
∂Vk Pk
Nkm =
Nmk =
Mkk =
Mkm =
Mmk =
∂
∂Vm Pk
∂
∂Vk Pm
∂
∂θk Qk
Lkk =
∂
∂θm Qk
∂
∂θk Qm
Lkm =
Lmk =
=
=
=
=
∂
∂Vk Qk
∂
∂Vm Qk
∂
∂Vk Qm
=
=
=
=
=
=
=
=
P
Gkk Vk + m∈K Vm (Gkm cos θkm + Bkm sen θkm)
Vk−1 Pk + Gkk Vk2
Vk (Gkm cos θkm + Bkm sen θkm)
Vm (Gkm cos θkm − Bkm sen θkm)
P
−Gkk Vk2 + Vk m∈K Vm (Gkm cos θkm + Bkm sen θkm)
−Gkk Vk2 + Pk
−Vk Vm (Gkm cos θkm + Bkm sen θkm )
−Vk Vm (Gkm cos θkm − Bkm sen θkm )
P
−Bkk Vk + m∈K Vm (Gkm sen θkm − Bkm cos θkm)
Vk−1 Qk − Bkk Vk2
Vk (Gkm sen θkm − Bkm cos θkm)
−Vk (Gkm sen θkm + Bkm cos θkm)
I As matrizes H, M, N e L têm as mesmas caracterı́sticas de esparsidade que a
matriz admitância nodal Y.
I As matrizes H, M, N e L têm dimensões distintas, em função dos dados do
problema. A seguinte técnica é normalmente utilizada:
1. Construir as matrizes completas (dimensão [NB × NB]).
2. Na matriz H colocar um número muito grande (→ ∞) nas posições das
diagonais correspondentes a barras de referência.
3. Na matriz L colocar um número muito grande (→ ∞) nas posições das
diagonais correspondentes a barras de referência e PV.
ET720
– 53–
ments
Quando essas matrizes forem invertidas, os elementos das linhas e colunas
correspondentes aos elementos grandes das diagonais serão praticamente
iguais a zero, assim como as correspondentes correções das variáveis de
estado, ou seja:
∆θk = 0
∆Vk = 0
k ∈ {referência}
k ∈ {referência,PV}
I Conhecendo-se os elementos da matriz Jacobiana e a maneira de calcular os
mismatches de potência, pode-se aplicar o método de Newton para o
problema do fluxo de carga.
Exemplo
Considerar a rede de 2 barras da Seção 2.5 :
Geração (slack)
Carga (PQ)
1
2
r
jx
Barra Dados Incógnitas
1
V 1 , θ1
P1 , Q 1
2
P2 , Q 2
V 2 , θ2
Para se conhecer o modo de operação da rede de forma completa deve-se
conhecer as tensões em todas as barras (Vk ∠θk ).
Incógnitas de tensão → V2 , θ2
→
2 incógnitas
São necessárias 2 equações → P2 , Q2
∆P2 = P2esp − P2 (V , θ) = 0
∆Q2 = Qesp
2 − Q2 (V , θ) = 0
ET720
SUBSISTEMA 1 (obter os V e θ que faltam)
– 54–
Problema iterativo a ser resolvido (fluxo de carga):
∆P2
H22 N22
=
∆Q2
M22 L22
∆θ2
∆V2
Resolvido o SUBSISTEMA 1, pode-se calcular as potências desconhecidas:
P1 = · · ·
Q1 = · · ·
SUBSISTEMA 2 (calcular as potências que faltam)
Exemplo
Considerar a rede de 3 barras a seguir.
Geração (slack )
Geração (PV)
∼
∼
1
2
PSfrag replacements
3
Carga (PQ)
ET720
– 55–
Barra Dados Incógnitas
1
V 1 , θ1
P1 , Q 1
P2 , V 2
Q 2 , θ2
2
3
P3 , Q 3
V 3 , θ3
Para se conhecer o modo de operação da rede de forma completa deve-se
conhecer as tensões em todas as barras (Vk ∠θk ).
Incógnitas de tensão → θ2 , V3 , θ3
→
3 incógnitas
São necessárias 3 equações → P2 , P3 , Q3
∆P2 = P2esp − P2 (V , θ) = 0
∆P3 = P3esp − P3 (V , θ) = 0
∆Q3 = Qesp
3 − Q3 (V , θ) = 0
SUBSISTEMA 1 (obter os V e θ que faltam)
Problema iterativo a ser resolvido (fluxo de carga):
∆P2
H22 H23 N23
∆P3 = H32 H33 N33
∆Q3
M32 M33 L33
∆θ2
∆θ3
∆V3
Resolvido o SUBSISTEMA 1, pode-se calcular as potências desconhecidas:
P1 = · · ·
Q1 = · · ·
Q2 = · · ·
ET720
SUBSISTEMA 2 (calcular as potências que faltam)
– 56–
I Algoritmo de resolução dos subsistemas 1 (pelo método de Newton) e 2:
(1) Fazer contador de iterações ν = 0.
Escolher os valores iniciais das tensões (magnitudes para as barras PQ e
ângulos de fase para as barras PQ e PV) → Vk0 , θk0 .
(2) Calcular Pk (V ν , θν ) para as barras PQ e PV.
Calcular Qk (V ν , θ ν ) para as barras PQ.
Calcular os resı́duos (mismatches) de potência ∆Pkν e ∆Qνk .
(3) Testar a convergência:
Se
ν
o processo iterativo
max {| ∆Pk |}k=PQ,PV ≤ εP
e
=⇒ convergiu para a solução
ν
max {| ∆Qk |}k=PQ ≤ εQ
(V ν , θν ) → ir para o passo (7).
Caso contrário, prosseguir.
(4) Calcular a matriz Jacobiana:
ν
ν
J (V , θ ) =
H (V ν , θ ν ) N (V ν , θ ν )
M (V ν , θ ν ) L (V ν , θ ν )
(5) Determinar a nova solução V ν+1, θ ν+1 :
θ ν+1 = θ ν + ∆θν
V ν+1 = V ν + ∆V ν
sendo as correções ∆θ ν e ∆V ν determinadas pela resolução do sistema
linear:
ET720
∆P (V ν , θ ν )
∆Q (V ν , θ ν )
=
H (V ν , θ ν ) N (V ν , θ ν )
M (V ν , θ ν ) L (V ν , θ ν )
∆θ ν
∆V ν
– 57–
(6) Incrementar o contador de iterações (ν + 1 ← ν) e voltar para o passo (2).
(7) Calcular Pk para a barra de referência e Qk para as barras de referência e
PV (subsistema 2).
Exemplo
Considerar a rede de 2 barras da Seção 2.5 :
Geração (slack)
PSfrag replacements
Carga (PQ)
1
2
r
Dados:
jx
S2 = P2 + j Q2 = 1 + j 0 = 1∠0◦ pu
V1 ∠θ1 = 1,0112∠0◦ pu
r = 0,01 pu
x = 0,05 pu
(100 MW, 0 Mvar)
Passo (1)
ν=0
V20 = 1,0112 pu , θ2 = 0 (valores arbitrários)
Passo (2)
P2 = V2V1 (G21 cos θ21 + B21 sen θ21) + V22G22
3,8462 −3,8462
−19,2308 19,2308
G=
B=
−3,8462 3,8462
19,2308 −19,2308
P2 = 1,0112V2 (−3,8462 cos θ2 + 19,2308 sen θ2) + 3,8462V22 para V20 e θ20 → P2 = 0
Q2 = V2 V1 (G21 sen θ21 − B21 cos θ21) − V22 B22
Q2 = 1,0112V2 (−3,8462 sen θ2 − 19,2308 cos θ2) + 19,8462V22 para V20 e θ20 → Q2 = 0
ET720
– 58–
∆P2 = P2esp − P2calc = −1 − 0 = −1
calc
=0−0=0
∆Q2 = Qesp
2 − Q2
Passo (3)
Considerar εP = εQ = 0,01
max {| ∆P2 |, | ∆Q2 |} = 1 > 0,01
Passo (4)
−V22B22 − Q2
J=
P2 − V22 G22
P2 + V22 G22 /V2
19,6640 3,8894
=
Q2 − V22B22 /V2
−3,9329 19,4462
Passo (5)
0,0489
−0,0098
J−1 =
0,0099 0,0494
−1
−0,0489
∆P2
∆θ2
−1
−1
=J
=
=J
0
−0,0099
∆Q2
∆V2
V2 = 1 − 0,0099 = 0,9901 pu
θ2 = 0 − 0,0489 = −0,0489 rad
Passo (6)
ν=1
Passo (2)
P2 = −1,0169 pu
Q2 = −0,1905 pu
∆P2 = 0,0169
∆Q2 = 0,1905
Passo (3)
max {| ∆P2 |, | ∆Q2 |} = 0,1905 > 0,01
Passo (4)
19,0424 2,7812
J=
−4,7874 18,8480
ET720
– 59–
Passo (5)
0,0506 −0,0075
−1
J =
0,0129 0,0512
∆θ2
−0,0006
=
∆V2
0,0100
V2 = 0,9901 + 0,0100 = 1,0001 pu
θ2 = −0,0489 − 0,0006 = −0,0495 rad
Passo (6)
ν=2
Passo (2)
P2 = −1,0002 pu
Q2 = 0,0028 pu
∆P2 = 0,0002
∆Q2 = −0,0028
Passo (3)
max {| ∆P2 |, | ∆Q2 |} = 0,0028 < 0,01
convergiu para V2 = 1,0001 pu
θ2 = −0,0495 rad
−2,8◦
Passo (7)
PSfrag replacements
P1 = V12G11 + V1 V2 (G12 cos θ12 + B12 sen θ12) = 1,0102 pu
Q1 = −V12 B11 + V1 V2 (G12 sen θ12 − B12 cos θ12) = 0,0472 pu
101,02 MW
4,72 Mvar
∆P2
0,02
V2
1,02
0,01
1,00
0,98
−0,10−0,05
−0,02−0,01
0,01 0,02 ∆Q2
θ2
−1
ET720
– 60–
2.9
Métodos desacoplados
I Submatrizes da matriz Jacobiana representam sensibilidades entre as
potências e a tensão (magnitude e ângulo), por exemplo:
H=
∂
P
∂θ
⇒
H≈
∆P
∆θ
→ uma variação no ângulo da tensão implica em uma variação da potência
ativa. O mesmo tipo de análise vale para as outras submatrizes.
I Nos métodos desacoplados, assume-se que as sensibilidades
∂
P
∂θ
e
∂
Q
∂V
∂
Q
∂θ
e
∂
P
∂V
são maiores que
ou seja, existe um acoplamento forte entre
[P e θ]
e
[Q e V ]
e um acoplamento fraco (desacoplamento) entre
[Q e θ]
e
[P e V ]
I Este fato é em geral verificado para redes de transmissão de extra e ultra
altas tensões (tensões acima de 230 kV). Não se verifica para redes de
distribuição em geral (nı́veis de tensão mais baixos).
ET720
– 61–
I O desacoplamento permite que outros métodos de solução do fluxo de carga
(que são derivados do método de Newton) sejam obtidos.
I Métodos desacoplados → simplificação da matriz Jacobiana.
→ modelo da rede é o mesmo utilizado no método de Newton.
→ o processo de convergência (caminho percorrido durante o processo
iterativo) é diferente.
→ o resultado final é o mesmo.
2.9.1
Método de Newton desacoplado
I Método de Newton:
∆P (V ν , θ ν ) = H (V ν , θν ) ∆θ ν + N (V ν , θν ) ∆V ν
∆Q (V ν , θ ν ) = M (V ν , θ ν ) ∆θν + L (V ν , θν ) ∆V ν
θ ν+1 = θ ν + ∆θν
V ν+1 = V ν + ∆V ν
I Devido ao desacoplamento, as matrizes de sensibilidade entre P e V (N) e
entre Q e θ (M) são ignoradas:
∆P (V ν , θν ) = H (V ν , θν ) ∆θν
∆Q (V ν , θν ) = L (V ν , θ ν ) ∆V ν
θ ν+1 = θ ν + ∆θν
V ν+1 = V ν + ∆V ν
ET720
– 62–
I Esta é a forma simultânea. Aplica-se agora o esquema de solução alternado:
∆P (V ν , θν ) = H (V ν , θν ) ∆θν
θ ν+1 = θ ν + ∆θν
∆Q (V ν , θν ) = L (V ν , θ ν ) ∆V ν
V ν+1 = V ν + ∆V ν
I Duas primeiras equações → meia-iteração ativa
Duas últimas equações → meia-iteração reativa
I Aproximações na matriz Jacobiana são parcialmente compensadas pela
atualização das variáveis V e θ a cada meia-iteração.
I Os subproblemas ativo e reativo podem ter velocidade de convergência
diferentes. Existem várias formas de implementar os métodos desacoplados.
ET720
– 63–
0
Método de Newton Desacoplado
KP = KQ = 1 p = q = 0
V 0 , θ0
Diagrama de Blocos
∆P (V q , θp )
≤
max {| ∆Pk |} : εp
k = {PQ, PV}
KP = 0
>
acements
Meia-iteração ativa
p
q
p −1
∆θ = H (V , θ )
q
KQ : 0
p
∆P (V , θ )
θ p+1 = θp + ∆θp
=
6=
p←p+1
KQ = 1
Solução
p
q
Meia-iteração reativa
∆Q (V , θ )
≤
max {| ∆Qk |} : εq
k = {PQ}
KQ = 0
>
q
q
p −1
∆V = L (V , θ )
q
p
∆Q (V , θ )
V q+1 = V q + ∆V q
KP : 0
=
6=
q ←q+1
KP = 1
ET720
– 64–
I No diagrama de blocos tem-se:
p,q são os contadores das iterações ativa e reativa.
KP e KQ são indicadores de convergência dos subproblemas ativo e reativo.
sempre que alguma variável de estado é alterada (p.ex. θ), o indicador de
convergência do outro subproblema (p.ex. subproblema reativo) é feito
igual a 1, forçando que os mismatches do outro subproblema (p.ex. ∆Q)
sejam avaliados, mesmo que este já estivesse convergido. Este
procedimento evita afastamentos do ponto de solução.
o diagrama de blocos corresponde à solução do subsistema 1. Após a
convergência, o subsistema 2 pode ser resolvido. Outras grandezas podem
também ser calculadas, como fluxos de potência nos ramos.
Método de Newton desacoplado – uma versão diferente
I Esta versão pode apresentar uma convergência mais rápida para alguns
sistemas.
I Considerar a matriz diagonal V:
V=
V1
V2 0
0 ...
Vn
I As matrizes jacobianas podem ser colocadas na seguinte forma:
H = V H0
L = V L0
ET720
– 65–
I Os elementos de H0 e L0 são:
0
Hkk
= −Qk /Vk − Vk Bkk
0
Hkm
= Vm (Gkm sen θkm − Bkm cos θkm )
0
Hmk = −Vk (Gkm sen θkm + Bkm cos θkm )
L0kk = Qk /Vk2 − Bkk
L0km = (Gkm sen θkm − Bkm cos θkm )
L0mk = − (Gkm sen θkm + Bkm cos θkm )
I As equações do método de Newton desacoplado ficam:
∆P /V = H0 ∆θ
∆Q/V = L0 ∆V
2.9.2
Método desacoplado rápido
I O diagrama de blocos é o mesmo que para o método desacoplado, mas as
matrizes utilizadas são diferentes.
I Considerar as seguintes aproximações:
cos θkm ≈ 1 (θkm pequeno) – válida para sistemas em geral, especialmente
para EAT (extra alta tensão) e UAT (ultra alta tensão).
Bkk Gkm sen θkm – válida para sistemas em geral, especialmente para EAT
(extra alta tensão) e UAT (ultra alta tensão) – Bkm /Gkm ≈ 5 para linhas de
transmissão acima de 230 kV, podendo chegar a 20 em linhas de 500 kV.
ET720
– 66–
Bkk Vk2 Qk – se baseia no fato de que as reatâncias shunt são em geral
muito maiores que as reatâncias série.
Vk ≈ 1 (valores em pu).
I As matrizes H0 e L0 ficam:
0
Hkk
= −Bkk
0
Hkm
= −Bkm
0
Hmk = −Bkm
L0kk = −Bkk
L0km = −Bkm
L0mk = −Bkm
ou:
H0 ≈ B 0
L0 ≈ B00
I As matrizes B0 e B00 dependem somente dos parâmetros da rede → são
constantes ao longo do processo iterativo.
São semelhantes à matriz B = ={Y} com as seguintes diferenças:
linhas e colunas referentes às barras de referência não aparecem em B0.
linhas e colunas referentes às barras de referência e PV não aparecem em
B00.
I As matrizes B0 e B00 têm estruturas idênticas às matrizes H e L.
I Pode-se trabalhar com as matrizes B0 e B00 com dimensões (NB × NB) e
colocar um número grande nas diagonais apropriadas.
ET720
– 67–
I As equações do método desacoplado rápido ficam:
∆P /V = B0 ∆θ
∆Q/V = B00 ∆V
I Melhorias no desempenho do método desacoplado rápido foram observadas
alterando-se a matriz B0, resultando em:
0
Bkk
0
Bkm
=
=
NB
X
x−1
km
m=1
0
Bmk
= −x−1
km
00
Bkk
= −Bkk
00
00
Bkm = Bmk
= −Bkm
em que xkm é a reatância série do ramo que conecta as barras k e m.
Exemplo
Considerar a rede de 2 barras da Seção 2.5 :
Geração (slack)
PSfrag replacements
Carga (PQ)
1
2
r
Dados:
ET720
jx
S2 = P2 + j Q2 = 1 + j 0 = 1∠0◦ pu
V1 ∠θ1 = 1,0112∠0◦ pu
r = 0,01 pu
x = 0,05 pu
(100 MW, 0 Mvar)
– 68–
G=
3,8462 −3,8462
−3,8462 3,8462
B=
−19,2308 19,2308
19,2308 −19,2308
(1)
KP = KQ = 1
p=q=0
V20 = 1,0112 pu, θ20 = 0 rad
(2)
P2 = V2V1 (G21 cos θ21 + B21 sen θ21) + V22G22 = 0
∆P2 = −1 − 0 = −1
(3)
| ∆P2 |= 1 > 0,01
(4)
∆P /V = B0 ∆θ
∆θ2 = −0,0494 rad
→
0
∆P2/V2 = B22
∆θ2
0
(B22
= 1/x = 20)
(5)
θ2 = 0 − 0,0494 = −0,0494 rad
(6)
p=1
(7)
KQ = 1
(8)
Q2 = V2 V1 (G21 sen θ21 − B21 cos θ21) − V22 B22 = 0,2182
∆Q2 = 0 − 0,2182 = −0,2182
(9)
| ∆Q2 |= 0,2182 > 0,01
ET720
– 69–
(10)
∆Q/V = B00 ∆V
∆V2 = −0,0112 rad
→
00
∆Q2/V2 = B22
∆V2
00
(B22
= 19,2308)
(11)
V2 = 1,0112 − 0,0112 = 1 pu
(12)
q=1
(13)
KP = 1
(14)
P2 = −0,9986
∆P2 = −1 + 0,9986 = −0,0014
(15)
| ∆P2 |= 0,0014 < 0,01
(16)
KP = 0
(17)
KQ 6= 0
(18)
Q2 = 0,0004
∆Q2 = 0 − 0,0004 = −0,0004
(19)
| ∆Q2 |= 0,0004 < 0,01
(20)
KQ = 0
ET720
– 70–
(21)
KP = 0
convergiu para V2 = 1 pu
θ2 = −0,0494 rad
−2,8◦
2.10
Controles e limites
I Os métodos mostrados tratam apenas da determinação do estado de
operação da rede (resolução do sistema de equações algébricas não-lineares).
I Complicações:
→ os equipamentos da rede apresentam limites de operação.
→ certos equipamentos realizam controle de certas grandezas.
I Limites:
→ injeção de potência reativa em barras PV (relacionado com as curvas de
capacidade, que serão vistas adiante).
→ limites de tensão em barras PQ.
→ limites dos taps de transformadores.
→ limites de fluxos em circuitos.
ET720
– 71–
I Controles:
→ controle de magnitude de tensão nodal (local e remota) por injeção de
reativos.
→ controle de magnitude de tensão nodal por ajuste de tap de
transformadores em fase.
→ controle de fluxo de potência ativa por ajuste do tap de transformadores
defasadores.
→ controle de intercâmbio entre áreas.
2.11
Programação por computador
I Redes elétricas reais em geral são de grande porte, resultando em matrizes
grandes e esparsas.
Considerar uma rede com 100 barras e 200 ramos.
A matriz Y terá dimensão (100 × 100) → 10000 elementos.
Destes, serão não nulos:
100 + 2| ·{z
200} = 500 elementos
|{z}
diag fora diag.
ou seja, um grau de esparsidade de:
GE =
ET720
10000 − 500
10000
· 100% = 95%
→
95% dos elementos são nulos!
– 72–
I Armazenamento compacto de matrizes
Inversão de matrizes → fatoração (eliminação de Gauss)
→ método de resolução robusto e eficiente.
ET720
– 73–
Referências
[1] F.L. Alvarado, R.J. Thomas, A Brief history of the power flow, IEEE
Spectrum, 2001.
[2] B. Stott, Review of load-flow calculation methods, Proceedings of the IEEE,
vol.62, n.7, 1974.
[3] A.J. Monticelli, A.V. Garcia, Introdução a sistemas de energia elétrica,
Unicamp, 1999.
[4] C.A. Castro, Material da disciplina IT601 – Cálculo de fluxo de potência,
disponı́vel em http://www.dsee.fee.unicamp.br/∼ccastro
ET720
– 74–
Download