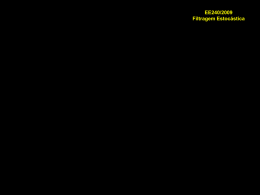
UNIVERSIDADE FEDERAL DA GRANDE DOURADOS AUTOR TESTE DOURADOS-MS 2010 AUTOR TÍTULO Trabalho de Conclusão de Curso de graduação apresentado para obtenção do título de Bacharel em Sistemas de Informação. Faculdade de Ciências Exatas e Tecnologia Universidade Federal da Grande Dourados Orientadora: Profa. Dra. Valguima V. V. A. Odakura Co-Orientador: Prof. M.Sc. Rodrigo Porfírio da Silva Sacchi DOURADOS-MS 2010 Resumo Palavras-chave: Sumário 1 2 3 Introdução 5 1.1 Objetivos Gerais . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5 1.2 Objetivos Especícos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5 1.3 Metodologia . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5 Fundamentos Teóricos 7 2.1 7 Filtro de Kalman . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Conclusão e Trabalhos Futuros 9 Capítulo 1 Introdução 1.1 Objetivos Gerais 1.2 Objetivos Especícos 1. Estudo de técnicas de multi-rastreamento. 2. Implementação de algoritmos para análise de ecácia dos larvicidas. 3. ... 1.3 Metodologia 1. Estudo de técnicas de multi-rastreamento. • Estudo de técnica de rastreamento simples (FK e FKE) • Estudo de técnicas de multi-rastreamento • Escolha da técnica de multi-rastreamento para as larvas 2. Implementação de algoritmos para rastreamento das larvas. • Modelagens das classes a serem utilizadas no sistema • Implementação do algoritmo de multi-rastreamento • Realização de testes • Programação da Interface do Sistema 1.3. Metodologia 3. Escrita da monograa. • Geração de artigo O trabalho esta organizado da seguinte maneira. Inicialmente será abordada a... 6 Capítulo 2 Fundamentos Teóricos Neste capítulo serão explanados os conceitos utilizados neste trabalho. Primeiramente se introduzirá o conceito do ltro de Kalman, para depois mostrar uma variação deste para modelos não-lineares, o ltro de Kalman Estendido. Finalizando, será explanada a técnica de casamento de dados Associação de Dados Probabilísticos Conjuntos - Joint Probabilistic Data Association, utilizada em conjunto com o ltro de Kalman. 2.1 Filtro de Kalman Segundo [1] o Filtro de Kalman(FK) é, em termos simples, um algoritmo de processamento de dados recursivo ótimo. O FK oferece uma solução ótima para o problema de rastreamento do estado de um processo de tempo discreto que serve para equações diferenciais estocásticas lineares. Formalmente, o modelo de movimento é denido pela matriz de transição de estado Fk,k+1 , n × n, que realiza o mapeamento do estado xk do alvo para o estado xk+1 . Todo estado xk é da forma xk = Fk−1,k xk−1 + wk , onde (2.1) wk é o ruído (ou erro) do estado. É necessário fornecer de entrada para o FK qual o ruído médio obtido em cada uma das variáveis em matriz de erro no estado xk , representado pela Qk , n × n. Outra restrição do FK é a necessidade de que todos os erros sejam aditivos, gaussianos e brancos. Temos que, quanto mais correta 2.1. Filtro de Kalman 8 Figura 2.1: Observações, predições e áreas de validação. for a matriz de transição para um determinado alvo, maior é a chance de se obter uma predição que seja bastante próxima do estado real do alvo, ou seja, a matriz de transição de estado é um conjunto de informações que permite ao FK realizar a predição de estado de um modo a diminuir o erro entre o estado predito e o estado real do alvo. Na Figura 2.1, supondo que de validação) e que a, b, c sejam predições (as circunferências são as áreas 1, 2, 3, 4e5 sejam observações, um evento provável seria o se- guinte conjunto de associações χ(k) = (a,2),(b,4),(c,3), um evento não-provável seria (a,1),(b,3),(c,2) pois a observação 1 não se encontra na área de validação de a. Capítulo 3 Conclusão e Trabalhos Futuros Referências Bibliográcas [1] Peter S. Maybeck. Stochastic models, estimation and control, volume 1 of C. Academic Press, 1979.
Baixar