Mecânica de Partı́culas
(Revisão)
Paulo J. S. Gil
Departamento de Engenharia Mecânica, Secção de Mecânica Aeroespacial
Instituto Superior Técnico
Cadeira de Satélites, Lic. Eng. Aeroespacial
Paulo J. S. Gil (SMA, IST)
Mecânica de Partı́culas (Revisão)
IST, LEAero, Satélites
1 / 73
Sumário
Cinemática
Movimento e Referencial
Coordenadas Polares e Curvilı́neas
Referenciais Relativos
Referenciais e Variação com o Tempo
Velocidade e Aceleração Relativas
Aplicação: Referencial em Rotação Sı́ncrona
Dinâmica de uma Partı́cula
Leis de Newton do Movimento
Lei da Gravitação Universal
Órbitas Circulares
Órbitas LEO e MEO
Órbitas Geostacionárias
Força, Impulso e Quantidade de Movimento; Impactos
Trabalho e Energia
Energia Potencial Gravı́tica
Momento Angular e Momento de Forças
Referenciais não Inerciais e Forças Inerciais
Sistemas de Partı́culas
Introdução
Forças Internas e Externas
Centro de Massa e Momento Angular
O problema geral dos n corpos
Integrais do Movimento
Paulo J. S. Gil (SMA, IST)
Mecânica de Partı́culas (Revisão)
IST, LEAero, Satélites
2 / 73
Cinemática
Sumário
Cinemática
Movimento e Referencial
Coordenadas Polares e Curvilı́neas
Referenciais Relativos
Referenciais e Variação com o Tempo
Velocidade e Aceleração Relativas
Aplicação: Referencial em Rotação Sı́ncrona
Dinâmica de uma Partı́cula
Leis de Newton do Movimento
Lei da Gravitação Universal
Órbitas Circulares
Órbitas LEO e MEO
Órbitas Geostacionárias
Força, Impulso e Quantidade de Movimento; Impactos
Trabalho e Energia
Energia Potencial Gravı́tica
Momento Angular e Momento de Forças
Referenciais não Inerciais e Forças Inerciais
Sistemas de Partı́culas
Introdução
Forças Internas e Externas
Centro de Massa e Momento Angular
O problema geral dos n corpos
Integrais do Movimento
Paulo J. S. Gil (SMA, IST)
Mecânica de Partı́culas (Revisão)
IST, LEAero, Satélites
3 / 73
Cinemática
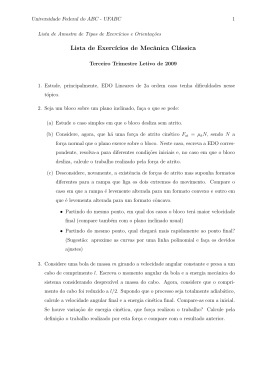
Movimento e Referencial
Movimento no Espaço Fı́sico
Fonte: NASA
I
O que é movimento de um
objecto?
I
I
I
I
O que é Movimento?
Movimento relativo a quê?
Acompanhando o objecto
não há movimento!
O movimento tem que ser
medido relativamente a
qualquer coisa i.e. a um
Referencial com coordenadas
Questão só relacionada com
movimento, ou seja, com
variação no tempo de
Movimentos relativos do Astronauta, da Estação de onde
é feita a observação e da Terra. . . e do Sol. . . e de . . .
posição — Cinemática
Movimento em si não tem que ver com as
causas do movimento: Dinâmica
I
Paulo J. S. Gil (SMA, IST)
Mecânica de Partı́culas (Revisão)
IST, LEAero, Satélites
4 / 73
Movimento e Referencial
Cinemática
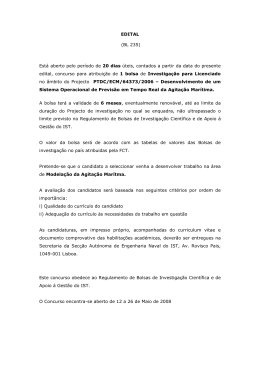
Velocidade e Aceleração
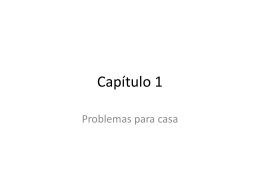
Partı́cula no Espaço
y
~ey
~at
~ey
~a
~ex
I
I
I
~v
I
Para medir posição, velocidade,
etc. — Referencial
I
Variação com o tempo das
coordenadas de uma partı́cula
— velocidade medida (relativa)
ao referencial v i = ẋ i
I
A variação do vector velocidade
é a aceleração
~ex
~an
x
O vectores decompõem-se na base local mas em referenciais
não curvilı́neos a base é sempre a mesma
Aceleração tangencial e normal: at = v̇ , an = v 2 /ρ com centro
instantâneo de curvatura à distância ρ
No caso de referenciais curvilı́neos a coisa complica-se. . .
Paulo J. S. Gil (SMA, IST)
Mecânica de Partı́culas (Revisão)
IST, LEAero, Satélites
5 / 73
Coordenadas Polares e Curvilı́neas
Cinemática
Coordenadas Curvilı́neas Polares
Posição e outras grandezas da partı́cula em coordenadas polares
~v
~eθ
y
~
ey
~eθ
~v
~
ex
~r
~ey
~er
~r
θ
θ
Partı́cula em pontos de
coordenadas diferentes em
instantes diferentes
I
Base diferente ⇒ Componentes
diferentes dos vectores
I
Vectores de base são diferentes
em cada ponto i.e. dependem
do tempo — Necessário levar
em conta a sua variação
~er
θ
− sin θ~
ex
I
x
~ex
Tem-se, em cada ponto,
~er = cos θ ~ex + sin θ ~ey
(1a)
~eθ = − sin θ ~ex + cos θ ~ey
(1b)
~ex ,~ey independentes do tempo porque são iguais em todo o plano
Paulo J. S. Gil (SMA, IST)
Mecânica de Partı́culas (Revisão)
IST, LEAero, Satélites
6 / 73
Cinemática
Coordenadas Polares e Curvilı́neas
Derivadas dos Vectores da Base Polar
~
ey
~eθ
y
Derivando
~er
θ
~er = cos θ ~ex + sin θ ~ey
~
ex
~eθ = − sin θ ~ex + cos θ ~ey
~r
~ey
e lembrando que os vectores
cartesianos são constantes, obtém-se:
θ
x
~ex
d~er
= − sin θ ~ex + cos θ ~ey = ~eθ
dθ
d~eθ
= − cos θ ~ex − sin θ ~ey = −~er
dθ
e ainda. . .
d
{~er ,~eθ } = 0
dr
Paulo J. S. Gil (SMA, IST)
⇒
(2a)
(2b)
~er ,~eθ só dependem de θ!
Mecânica de Partı́culas (Revisão)
(3)
IST, LEAero, Satélites
7 / 73
Cinemática
Coordenadas Polares e Curvilı́neas
Velocidade em Coordenadas Polares
Derivadas em Ordem ao Tempo dos vectores da Base Polar
Finalmente, utilizando a regra da derivada composta,
d~er
d~er dθ
=
= ~eθ θ̇
dt
dθ dt
d~eθ
d~eθ dθ
=
= −~er θ̇
dt
dθ dt
(4a)
(4b)
Velocidade em Coordenadas Polares
A posição da partı́cula em polares é simplesmente ~r = r~er e a
velocidade obtém-se derivando o vector posição
~v =
d~er
d~r
= ṙ ~er + r θ̇ ~eθ .
= ṙ ~er + r
dt
dt
(5)
As componentes da velocidade em coordenadas polares são (ṙ , r θ̇)
Paulo J. S. Gil (SMA, IST)
Mecânica de Partı́culas (Revisão)
IST, LEAero, Satélites
8 / 73
Cinemática
Coordenadas Polares e Curvilı́neas
Aceleração em Coordenadas Polares
Derivando a velocidade ~v = ṙ ~er + r θ̇ ~eθ em coordenadas polares,
incluindo os vectores da base,
~a =
d~v
d~er
d~eθ
+ (ṙ θ̇ + r θ̈)~eθ + r θ̇
= r̈ ~er + ṙ
dt
dt
dt
= r̈ ~er + ṙ θ̇ ~eθ + (ṙ θ̇ + r θ̈)~eθ + r θ̇ −θ̇~er
(6)
obtém-se finalmente a aceleração em coordenadas polares
~a = (r̈ − r θ̇2 ) e~r + (r θ̈ + 2ṙ θ̇)~eθ
(7)
com componentes (r̈ − r θ̇2 , r θ̈ + 2ṙ θ̇). Notas:
I ar 6= dvr , aθ 6= dvθ
dt
dt
I Caso de movimento circular não uniforme em torno da origem
(ṙ = r̈ = 0): Reparar que ~an = −r θ̇2 ~er ⇒ an = r ω 2 = v 2 /r ,
~v = r θ̇ ~eθ ⇒ v = ωr , ~at = r θ̈ ~eθ ⇒ at = r ω̇
Paulo J. S. Gil (SMA, IST)
Mecânica de Partı́culas (Revisão)
IST, LEAero, Satélites
9 / 73
Cinemática
Coordenadas Polares e Curvilı́neas
Velocidade em Coordenadas Curvilı́neas
I
I
Coordenadas curvilı́neas polares
x = r cos θ,
(8a)
y = r sin θ.
(8b)
Velocidade da partı́cula na base natural {~e1 ,~e2 } (componentes
contravariantes)
v i = ẋ i = (ṙ , θ̇)
(9)
0
0
I
Métrica gij = Xii Xjj δi 0 j 0
I
A velocidade fı́sica (definição): v(i) = hi ẋ i
I
Velocidade fı́sica em coordenadas polares
⇒
factores de escala: hi = 1, r
v(i) = (vr , vθ ) = (ṙ , r θ̇)
Paulo J. S. Gil (SMA, IST)
Mecânica de Partı́culas (Revisão)
(10)
IST, LEAero, Satélites
10 / 73
Cinemática
Coordenadas Polares e Curvilı́neas
Aceleração em Coordenadas Curvilı́neas
I
A aceleração contravariante é definida como derivada total para
contar com variação dos vectores da base local
Dv i
dx j
∂v i
=
∇j v i = v j j + Γijk v j v k
dt
dt
∂x
i
i j k
= ẍ + Γjk v v
ai =
I
Os sı́mbolos de Christoffel Γijk , etc. são neste caso
I
Γrrr = Γθθθ = Γθrr = Γrr θ = Γrθr = 0,
1
Γrθθ = −r ,
Γθr θ = Γθθr =
r
As componentes contravariantes da aceleração são então
2
(11a)
(12)
a1 = ẍ 1 + Γrθθ v θ + 0 = r̈ − r θ̇2
(13a)
2
a2 = ẍ 2 + Γθr θ v r v θ + Γθθr v θ v r + 0 = θ̈ + ṙ θ̇
r
(13b)
Paulo J. S. Gil (SMA, IST)
Mecânica de Partı́culas (Revisão)
IST, LEAero, Satélites
11 / 73
Cinemática
Coordenadas Polares e Curvilı́neas
Aceleração Fı́sica em Coordenadas Curvilı́neas
I
As componentes fı́sicas da aceleração obtêm-se das contravariantes multiplicando pelo respectivo factor de escala
a(i) = hi ai :
a(1) = ar = 1 a1 = 1 (r̈ − r θ̇2 ) = r̈ − r θ̇2
2
2
a(2) = aθ = r a = r θ̈ + ṙ θ̇ = r θ̈ + 2ṙ θ̇
r
I
(14a)
(14b)
Ou seja, as componentes fı́sicas da aceleração são
(ar , aθ ) = (r̈ − r θ̇2 , r θ̈ + 2ṙ θ̇)
(15)
TPC: Utilizar este procedimento para outras coordenadas, e.g.
esféricas, e verificar que é mais fácil utilizar o procedimento de
geometria diferencial do que fazer as derivadas directamente. . .
Paulo J. S. Gil (SMA, IST)
Mecânica de Partı́culas (Revisão)
IST, LEAero, Satélites
12 / 73
Cinemática
Coordenadas Polares e Curvilı́neas
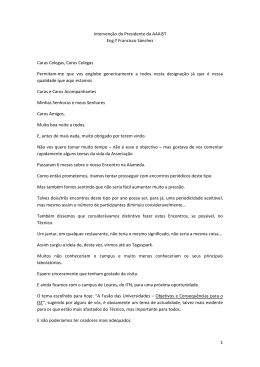
Componentes
Normal e Tangencial
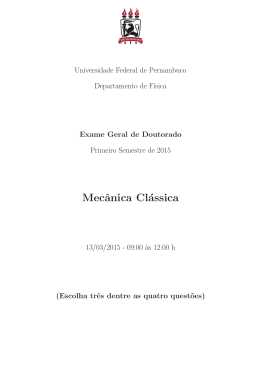
Fonte: Beer & Johnston
Trajectória
I
I
I
I
I
Trajectória arbitrária mas. . .
I
Velocidade sempre tangente
à trajectória ~v = v~et
I
Localmente: trajectória é
curva de raio ρ e centro na
direcção de ~en ; velocidade
escalar v : v dt = ds = ρdθ
et
en
Variação da base local (similar às coord. polares): d~
dθ = ~
Aceleração:
2
et
et dθ ds
dv
dv
v
dv
~a = d~
et + v d~
et + v d~
et + vρ ~en
dt = dt ~
dt = dt ~
dθ ds dt = dt ~
an só muda direcção de ~v , é só centrı́peta; at só varia k~v k
Em 3D a trajectória pode ter torção e sair do plano osculador;
~a tem 3 componentes; a binormal varia de direcção. . .
Paulo J. S. Gil (SMA, IST)
Mecânica de Partı́culas (Revisão)
IST, LEAero, Satélites
13 / 73
Referenciais Relativos
Sumário
Cinemática
Movimento e Referencial
Coordenadas Polares e Curvilı́neas
Referenciais Relativos
Referenciais e Variação com o Tempo
Velocidade e Aceleração Relativas
Aplicação: Referencial em Rotação Sı́ncrona
Dinâmica de uma Partı́cula
Leis de Newton do Movimento
Lei da Gravitação Universal
Órbitas Circulares
Órbitas LEO e MEO
Órbitas Geostacionárias
Força, Impulso e Quantidade de Movimento; Impactos
Trabalho e Energia
Energia Potencial Gravı́tica
Momento Angular e Momento de Forças
Referenciais não Inerciais e Forças Inerciais
Sistemas de Partı́culas
Introdução
Forças Internas e Externas
Centro de Massa e Momento Angular
O problema geral dos n corpos
Integrais do Movimento
Paulo J. S. Gil (SMA, IST)
Mecânica de Partı́culas (Revisão)
IST, LEAero, Satélites
14 / 73
Referenciais Relativos
Referenciais e Variação com o Tempo
Medição de Grandezas e referenciais
I
Referencial com origem diferente: vector posição diferente
I
Referencial que se move relativamente a outro: variação com o
tempo de uma grandeza dependente das coordenadas é
diferente nos dois referenciais
I
Exemplo: velocidade — variação das coordenadas, que são
dependentes do referencial
I
Conceito de grandeza (e.g. velocidade) medida relativamente a
um certo referencial
I
Os vectores podem no entanto ser escritos no referencial que se
quiser
I
Conclusão: Uma grandeza fı́sica pode ser medida num
referencial e ser escrita noutro
Nota: Só se vai considerar transformações entre referenciais ortonormados; a partir de
cada referencial pode-se depois passar para um curvilı́neo parado relativamente a ele
Paulo J. S. Gil (SMA, IST)
Mecânica de Partı́culas (Revisão)
IST, LEAero, Satélites
15 / 73
Referenciais Relativos
Referenciais e Variação com o Tempo
Vectores Escritos Relativamente a Referenciais
Referenciais com movimento relativo
I
2 referenciais ortonormados i e e com vectores de base
respectivamente {~i1 ,~i2 ,~i3 , } (e.g. ref. inercial) e {~e1 ,~e2 ,~e3 , }
I
A variação com o tempo de uma grandeza depende do
referencial onde é observada (medida)
I
Mas do ponto de vista de cada referencial, os vectores de base
não variam com o tempo — como distinguir?
I
Vai-se considerar o que acontece a uma grandeza fı́sica
vectorial:
~ = A(i)~ik = A(e)
A
em
m ~
k
(16)
Nota: válida a convenção da soma: ı́ndices repetidos somam sobre a
gama de variação
Paulo J. S. Gil (SMA, IST)
Mecânica de Partı́culas (Revisão)
IST, LEAero, Satélites
16 / 73
Referenciais Relativos
Referenciais e Variação com o Tempo
Derivadas Temporais e Referenciais
Variação com o tempo depende do referencial utilizado
I
id
dt
é a variação temporal observada (medida) do referencial {i}:
i dA
~
dt
(i)
= Ȧk ~ik
(17)
(a base não varia relativamente ao próprio referencial)
I
ed
dt
é a variação com o tempo medida no referencial {e}:
e dA
~
dt
I
Mas
(e)
= Ȧm ~em
(18)
i dA
~
(e)
(e)
= Ȧm ~em + Am ~e˙ m
(19)
dt
Vistos do referencial {i} os vectores do referencial {e} variam
Paulo J. S. Gil (SMA, IST)
Mecânica de Partı́culas (Revisão)
IST, LEAero, Satélites
17 / 73
Referenciais e Variação com o Tempo
Referenciais Relativos
Translação Relativa de Referenciais
v~0
y
y0
~ O0
Referencial com velocidade V
relativamente ao primeiro
I
Como não há rotação relativa
do referencial os vectores das
bases são sempre os mesmos —
não variam com o tempo!
~
V
~ O0
V
~ey 0
~r
~ey R
~
O
I
~ O0
R
O0
~ex 0
x
~ O0
V
~ =R
~ O 0 + ~r
R
⇒
~ex
x0
Se estivesse rodado um ângulo
constante seria similar
p dR
p ~
p
~
~ = dRO 0 + d~r
≡V
(20)
dt
dt
dt
I
p dR
~ 0
O
~ O 0 é a velocidade do ref. encarnado medida no preto
=V
~ei 0 = Cte logo a velocidade ~v 0 medida no referencial encarnado
p d~
e d~
r
r
~ =V
~ O 0 + ~v 0
=
= v0
⇒
V
(21)
dt
dt
dt
Paulo J. S. Gil (SMA, IST)
Mecânica de Partı́culas (Revisão)
IST, LEAero, Satélites
18 / 73
Referenciais Relativos
Referenciais e Variação com o Tempo
Notas à Translação Relativa de Referenciais
I
Como os vectores de base não variam com o tempo, não há
grandes diferenças nas grandezas medidas num referencial e
noutro
I
Se os referenciais fizerem um ângulo constante os vectores de
base também não variam, embora a decomposição dos vectores
seja diferente nos 2 referenciais
I
Para a aceleração (e outros vectores) tudo é similar, obtendo-se
~a = ~aO 0 + ~a0
(22)
onde ~a0 é a velocidade medida no referencial encarnado
I
Se um referencial roda relativamente ao outro tudo muda pois
os vectores da base vão depender do instante considerado
Paulo J. S. Gil (SMA, IST)
Mecânica de Partı́culas (Revisão)
IST, LEAero, Satélites
19 / 73
Referenciais Relativos
Referenciais e Variação com o Tempo
Referenciais em Rotação
Caso particular 2D
I
Referenciais com a mesma origem, um referencial {s} a rodar
relativamente ao outro {i} com velocidade angular ω
~
I
I
O vector posição de uma partı́cula é o mesmo mas
decompõe-se de modo diferente nos dois referenciais
~ = i d~r
Velocidade medida no referencial {i}: V
I
Velocidade medida no referencial {s}: ~v 0 =
I
~r pode ser escrito no referencial {s}: ~r = x~s1 + y~s2
dt
s d~
r
dt
i
s
~ = d~r = ẋ~s1 + ẏ~s2 + x~s˙1 + y~s˙2 = d~r + x~s˙1 + y~s˙2
V
dt
dt
Paulo J. S. Gil (SMA, IST)
Mecânica de Partı́culas (Revisão)
(23)
IST, LEAero, Satélites
20 / 73
Referenciais e Variação com o Tempo
Referenciais Relativos
Derivadas dos Vectores da Base
y
∆~s2
y
~s2
P
~i2
~r
∆~s1
~s
θ 1
~i1
x
∆θ
x
I
Rotação infinitesimal do
referencial {s} entre t e t + ∆t
I
O referencial roda ∆θ = ω∆t
I
No limite quando ∆t → 0
obtém-se as derivadas
∆~s1 = k~s1 k∆θ~s2 = ∆θ~s2
∆~s2 = k~s2 k∆θ (−~s1 ) = −∆θ~s1
(24b)
∆~s1
∆θ
~s˙1 = lim
~s2 = θ̇~s2 = ω~s2
= lim
∆t→0 ∆t
∆t→0 ∆t
∆~s2
∆θ
~s˙2 = lim
~s1 = −θ̇~s1 = −ω~s1
= − lim
∆t→0 ∆t
∆t→0 ∆t
Paulo J. S. Gil (SMA, IST)
(24a)
Mecânica de Partı́culas (Revisão)
(25a)
(25b)
IST, LEAero, Satélites
21 / 73
Referenciais Relativos
Referenciais e Variação com o Tempo
Transformação Temporal em 2D
Notando que a velocidade angular ω
~ = ω~s3 do referencial {s}
medida em {i} tem a direcção da terceira componente obtém-se
~s˙1 = ω~s2 = ω
~ × ~s1
~s˙2 = −ω~s1 = ω
~ × ~s2
(26a)
(26b)
Finalmente
s
s d~
i
s
r
~ = d~r = d~r +x~s˙1 +y~s˙2 = d~r +~
ω ×(x~s1 )+~
ω ×(y~s2 ) =
+~
ω ×~r
V
dt
dt
dt
dt
(27)
v0 =
s d~
r
dt
é a velocidade medida no referencial {s}
Paulo J. S. Gil (SMA, IST)
Mecânica de Partı́culas (Revisão)
IST, LEAero, Satélites
22 / 73
Referenciais Relativos
Referenciais e Variação com o Tempo
Notas
I
Resultado geral sobre a variação com o tempo
i d( )
dt
=
s d( )
dt
+ω
~ × ()
(28)
I
Aplicado a vectores — válido para quaisquer referenciais
I
Vectores podem ser escritos na base que se quiser, desde que se
possa realizar os cálculos
I
ω
~ também se designa ω
~ si , explicitando os referenciais para
evitar confusões (velocidade angular do referencial {s}
relativamente ao referencial {i})
I
Resultado demonstrado não é geral
Paulo J. S. Gil (SMA, IST)
Mecânica de Partı́culas (Revisão)
IST, LEAero, Satélites
23 / 73
Referenciais Relativos
Referenciais e Variação com o Tempo
Variação Temporal em 2 referenciais — Caso Geral
2 referenciais A e B
0
I
Vector ~v = v i ~ei = v i ~ei 0 escrito respectivamente em A e B
I
Como os vectores ~ei não variam em A
i
A d~
v
dv
~ei = v̇ i ~ei
=
dt
dt
I
(29)
0
0
X são as matrizes de transformação, v i = Xii0 v i ,~ei = Xij ~ej 0 e
A d~
v
dt
=
=
dv i
dt
d i i0 j0
Xi 0 v Xi ~ej 0
dt
~ei =
0
0
Ẋii0 Xij v i
| {z }
matriz T
| {z }
comp. vector em B
Paulo J. S. Gil (SMA, IST)
0
0
~ej 0 + Xii0 Xij (v̇ i )~ej 0
| {z }
Mecânica de Partı́culas (Revisão)
(30)
0
δij0
|
{z
v̇ j 0 ~ej 0 =
B d~
v
dt
}
IST, LEAero, Satélites
24 / 73
Referenciais e Variação com o Tempo
Referenciais Relativos
Matriz Velocidade Angular
Transformações ortonormadas:
R ≡ Xii0
⇒
0
Xij = R −1 = R >
R > = R −1
⇒
T = R > Ṙ
R > R = R −1 R = 1
⇔
(31)
(32)
Diferenciando (32)
d(R > R)
= Ṙ > R + R > Ṙ = 0
dt
⇒
Ṙ > R = −R > Ṙ = −(ṘR > )>
(33)
Tij = R > Ṙ = −(ṘR > )> = −Tji
⇒
T é antissimétrica (34)
Supor T da forma
0
ω 30
T =
−ω20
Paulo J. S. Gil (SMA, IST)
−ω30
0
ω 10
ω 20
−ω10
0
Mecânica de Partı́culas (Revisão)
(35)
IST, LEAero, Satélites
25 / 73
Referenciais e Variação com o Tempo
Referenciais Relativos
Transformação das Derivadas Temporais
O termo da equação (30) vem então
0
j0 i i0
ω 30
Xi Ẋi 0 v ~ej 0 = ~e10 ~e20 ~e30
−ω20
30
0
ω 2 v 10
= ~e10 ~e20 ~e30 ω30 v
0
ω 10 v 2
−ω30
0
ω 10
10
v
ω 20
0
−ω10
v2
0
0
v3
20
− ω 30 v
0
~ × ~v
− ω 10 v 3 = ω
0
1
− ω 20 v
(36)
Finalmente
A d~
v
dt
=
B d~
v
+ω
~ × ~v
(37)
+ω
~ ×()
(38)
dt
Como ~v é arbitrário
Ad
dt
Paulo J. S. Gil (SMA, IST)
=
Bd
dt
Mecânica de Partı́culas (Revisão)
IST, LEAero, Satélites
26 / 73
Referenciais Relativos
Referenciais e Variação com o Tempo
Notas
I
A forma vectorial é invariante, válida para todos os referenciais
admissı́veis (basta concretizar)
I
Referenciais ortonormados direitos
I
~v pode ser qualquer vector!
I
Para cálculos, todos os termos têm que estar no mesmo
referencial mas este é qualquer um (explicar) — mas as
derivadas têm que ser calculadas no referencial certo
I
ω
~ é a velocidade angular de B relativamente a A
A d~
e
dt
i0
=
B d~
e
i0
| dt
{z }
+~
ω × ~ei 0
(39)
=0
Paulo J. S. Gil (SMA, IST)
Mecânica de Partı́culas (Revisão)
IST, LEAero, Satélites
27 / 73
Referenciais Relativos
Velocidade e Aceleração Relativas
Velocidades Relativas — Caso Geral
v~0
Referencial {s} (vermelho) a rodar
com velocidade angular ω
~ si
relativamente ao referencial {i}
I
Os vectores posição relacionam-se
~
V
z0
z R
~ ~ ~r
RO 0
O
x
I
x0
y
O0
y0
~ =R
~ O 0 + ~r
R
(40)
~r ≡ ~r 0 é o vector posição relativo ao
referencial vermelho
Derivando (40) e utilizando a transformação da derivada temporal
i
i
s
~ O 0 + d~r + ω
~ O 0 + d ~r = V
~ ≡V
~ = dR
~ si × ~r
R
dt
dt
dt
dt
(41)
~ =V
~ O 0 + ~v 0 + ω
V
~ si × ~r 0
(42)
id
Nota: Vectores escritos em qualquer referencial
Paulo J. S. Gil (SMA, IST)
Mecânica de Partı́culas (Revisão)
IST, LEAero, Satélites
28 / 73
Referenciais Relativos
Velocidade e Aceleração Relativas
Acelerações Relativas
Para a aceleração (caso geral) o processo é similar
Utilizando
~a ≡
id
dt
i d2 R
~
dt 2
=
=
sd
dt
~ = ~v 0 + V
~ O0 + ω
+ω
~ ×() e V
~ × ~r
i d2 R
~ O0
dt 2
= ~aO 0
= ~aO 0 +
i d2~
r
id
s
d~r
+ω
~ si × ~r
+ 2 = ~aO 0 +
dt
dt dt
s i d~
id
d~r
r
+ω
~˙ si × ~r + ω
~ si ×
+
dt dt
dt
s d2~
r
s d~
r
si
si
˙ si × ~r + ω
~0 + ω
+
ω
~
×
v
~
~
×
+ω
~ si × (~
ω si × ~r )
2
dt
dt
= ~aO 0 + ~a0 + ω
~ si × (~
ω si × ~r ) + ω
~˙ si × ~r + 2~
ω si × v~0 (43)
Obtém-se finalmente a relação entre as acelerações de uma partı́cula
medidas em referenciais diferentes
~a = ~a0 + ~aO 0 + ω
~ si × (~
ω si × ~r 0 ) + ω
~˙ si × ~r 0 + 2~
ω si × v~0
Paulo J. S. Gil (SMA, IST)
Mecânica de Partı́culas (Revisão)
(44)
IST, LEAero, Satélites
29 / 73
Referenciais Relativos
Velocidade e Aceleração Relativas
Significado Fı́sico dos Termos de Aceleração
Observando do referencial{s}:
~ si × (~
ω si × ~r 0 ) − ω
~˙ si × ~r 0 − 2~
ω si × v~0
a~0 = ~a − ~aO 0 − ω
I
I
(45)
~a0 é a aceleração medida em {s}, ~aO 0 é a aceleração da origem
do referencial {s}
ω
~˙ si × ~r 0 tem que ver com a aceleração angular ω
~˙ si do
referencial {s} medida no referencial {i}
I
−~
ω si × (~
ω si × ~r 0 ) é a aceleração centrı́fuga
I
−2~
ω si × v~0 é a aceleração de Coriolis, devido a
I
I
Rotação do vector velocidade relativa quando o referencial roda
Variação da velocidade tangencial quando por acção da
velocidade relativa a distância à origem muda
Paulo J. S. Gil (SMA, IST)
Mecânica de Partı́culas (Revisão)
IST, LEAero, Satélites
30 / 73
Referenciais Relativos
Velocidade e Aceleração Relativas
Notas
Exemplos dos efeitos das acelerações inerciais
I
Foguetão no espaço
I
Autocarro sem janelas a curvar
I
Estação espacial
I
Acelerações inerciais → forças inerciais ”fictı́cias“
Paulo J. S. Gil (SMA, IST)
Mecânica de Partı́culas (Revisão)
IST, LEAero, Satélites
31 / 73
Referenciais Relativos
Aplicação: Referencial em Rotação Sı́ncrona
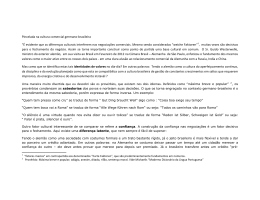
Vertical Local, Horizontal Local
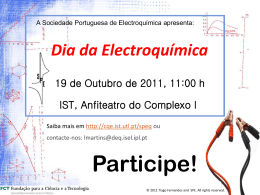
Fonte: NASA
I
I
I
I
Referencial LVLH (Local
Vertical Local Horizon)
I
Eixo z na direcção do
centro da Terra
I
Eixo x no plano da órbita
e sentido geral de avanço
I
Eixo y perpendicular ao
plano da órbita, formando
um triedro direito
Flight Path Angle: ângulo da velocidade com eixo dos x
Órbitas circulares: velocidade tem direcção de x
Eixo z é às vezes definido com sentido de zénite e não de nadir
Referencial com velocidade angular correspondente ao perı́odo
de revolução do satélite
Paulo J. S. Gil (SMA, IST)
Mecânica de Partı́culas (Revisão)
IST, LEAero, Satélites
32 / 73
Dinâmica de uma Partı́cula
Sumário
Cinemática
Movimento e Referencial
Coordenadas Polares e Curvilı́neas
Referenciais Relativos
Referenciais e Variação com o Tempo
Velocidade e Aceleração Relativas
Aplicação: Referencial em Rotação Sı́ncrona
Dinâmica de uma Partı́cula
Leis de Newton do Movimento
Lei da Gravitação Universal
Órbitas Circulares
Órbitas LEO e MEO
Órbitas Geostacionárias
Força, Impulso e Quantidade de Movimento; Impactos
Trabalho e Energia
Energia Potencial Gravı́tica
Momento Angular e Momento de Forças
Referenciais não Inerciais e Forças Inerciais
Sistemas de Partı́culas
Introdução
Forças Internas e Externas
Centro de Massa e Momento Angular
O problema geral dos n corpos
Integrais do Movimento
Paulo J. S. Gil (SMA, IST)
Mecânica de Partı́culas (Revisão)
IST, LEAero, Satélites
33 / 73
Dinâmica de uma Partı́cula
Leis de Newton do Movimento
Leis de Newton do Movimento
Mecânica clássica baseada nas 3 leis do movimento de Newton:
Leis de Newton do movimento
1. Lei da inércia
~ = d (m~v ) ⇔ F
~ = m~a quando m = Cte
2. F
dt
3. Lei da acção/reacção ~fij = −~fji , i, j = 1 . . . N (N partı́culas)
I
I
Primeira Lei é consequência da segunda
Newton explicitou a primeira Lei provavelmente para marcar a
diferença com a Fı́sica Aristotélica
Hipóteses e questões adicionais
I
Dinâmica Newtoniana: Espaço Absoluto e Tempo Absoluto
I
Segunda Lei calculada num Referencial de Inércia — como é
definido?
I
Tautologia Força-Massa. . .
Paulo J. S. Gil (SMA, IST)
Mecânica de Partı́culas (Revisão)
IST, LEAero, Satélites
34 / 73
Dinâmica de uma Partı́cula
Leis de Newton do Movimento
Referenciais Inerciais e Não Inerciais
Referenciais de Inércia
I
Movimento relativo de referenciais podem alterar o movimento
sentido como se fossem forças
I
Einstein: Teoria da relatividade — referencial de inércia não
existe. . .
I
Mundo real: Referencial suficientemente próximo do inercial —
não é necessário resolver todos os problemas no referencial da
Galáxia com orientação definida por quasares distantes
I
Utilização de referenciais não inerciais — necessário saber
escrever as equações nestes referenciais e relacioná-las com as
escritas nos de inércia
Paulo J. S. Gil (SMA, IST)
Mecânica de Partı́culas (Revisão)
IST, LEAero, Satélites
35 / 73
Dinâmica de uma Partı́cula
Leis de Newton do Movimento
Utilização de Referenciais Não Inerciais
I
Necessário saber escrever as equações nestes referenciais e
relacioná-las com as escritas nos de inércia
I
I
I
Escolher referencial
Escrever (determinar) equações do movimento (sempre possı́vel)
Resolver equações do movimento — tarefa mais difı́cil. . .
Outras Questões
I
Soluções em geral não disponı́veis para sistemas reais —
aproximações!
I
Sistemas mais complicados — muitas partı́culas, sistemas
contı́nuos
I
Forças de ligação em sistemas
I
Coordenadas generalizadas: n coordenadas ⇔ n graus de
liberdade ⇔ n equações
Paulo J. S. Gil (SMA, IST)
Mecânica de Partı́culas (Revisão)
IST, LEAero, Satélites
36 / 73
Dinâmica de uma Partı́cula
Lei da Gravitação Universal
Lei da Gravitação Universal de Newton
I
Todos os corpos exercem uma acção à distância, instantânea
de atracção mútua
I
A força de atracção é exercida na direcção da linha que une os
corpos, proporcional às suas massas e ao inverso do quadrado
da distância:
Gm1 m2
F (r ) =
(46)
r2
I
A atracção é mútua (Lei da acção/reacção)
I
A massa gravı́tica que figura na Lei da Gravitação Universal é
de natureza diferente da massa inercial, constante de
proporcionalidade da Segunda Lei de Newton do movimento
I
Experiência: massa inercial ⇔ massa gravı́tica
I
Einstein: massas inercial e gravı́tica são a mesma coisa
Paulo J. S. Gil (SMA, IST)
Mecânica de Partı́culas (Revisão)
IST, LEAero, Satélites
37 / 73
Força Gravı́tica à Superfı́cie da Terra
Ver aulas práticas
Força da gravidade à superfı́cie r = R⊕ + h, R⊕ = 6378 km
1
~ g = − GMm
~er = − (RGMm
F
er = − GMm
2~
r2
R 2 (1+ h
⊕ +h)
⊕
R⊕
~e
)2 r
= m~g (1+ 1h
R⊕
)2
(47)
Sabendo desenvolvimento em série
1
' 1 ∓ αx ± . . .
(1 ± x)α
(48)
Então
~ g ' m~g (1 − 2 h + . . .) ' m~g ,
F
R⊕
Se h = 100 km,
g=
mg − mg (1+ 1h
R⊕
mg
GM
' 9.81m/s2 (49)
2
R⊕
)2
' 3%
(50)
Órbitas Circulares
Ver aulas práticas
I
Órbitas baixas, LEO (Low Earth Orbit): da altitude mı́nima
(cerca de 200 km) a 1000 km de altitude (autores diferentes
usam limites diferentes)
I
Órbitas intermédias, MEO : acima das LEO, perı́odos tı́picos de
2 h a 12 h; satélites GPS e Molniya são desta categoria
I
As MEO passam nas camadas de Van Allen
Órbitas Geostacionárias
Ver aulas práticas
I
Órbitas geostacionárias: perı́odo iguala o dia sideral
I
Têm que estar no equador (se não serão apenas geossı́ncronas)
Dinâmica de uma Partı́cula
Força, Impulso e Quantidade de Movimento; Impactos
Força, Impulso e Quantidade de Movimento
I
I
Quantidade de Movimento ou Momento Linear: ~p = m~v
P~
p
Segunda Lei de Newton:
F = d~
dt
I
Efeito de uma força a actuar ao longo do tempo: Impulso
(intuitivo: quanto mais tempo uma força actua, mais impulso)
I
Definição de Impulso total aplicado numa partı́cula:
Z t2
Z t2
P~
d~p
~I =
F dt =
dt = ~p2 − ~p1 = m~v2 − m~v1
t1
t1 dt
I
(51)
Impulso é um vector
~I = ∆~p
(52)
e o seu total iguala a variação da quantidade de movimento
Paulo J. S. Gil (SMA, IST)
Mecânica de Partı́culas (Revisão)
IST, LEAero, Satélites
41 / 73
Força, Impulso e Quantidade de Movimento; Impactos
Dinâmica de uma Partı́cula
Impacto
Fonte: Beer & Johnston
Impacto
I
Colisão entre 2 corpos num
pequeno intervalo de tempo ⇒
Forças de impacto muito grandes
Durante o impacto — impulso de
outras forças desprezável; só forças
de impacto contribuem para ∆~p
Linha de impacto: normal comum às superfı́cies de impacto
I
I
I
Impacto central: CM das partı́culas está encontra-se na linha
de impacto; se não, o impacto é excêntrico
I
Impacto directo: velocidades dos corpos são colineares; se não,
o impacto diz-se oblı́quo
Paulo J. S. Gil (SMA, IST)
Mecânica de Partı́culas (Revisão)
IST, LEAero, Satélites
42 / 73
Dinâmica de uma Partı́cula
Força, Impulso e Quantidade de Movimento; Impactos
Impacto Central Directo
I
Corpos a moverem-se na mesma direcção; Quando chocam
sofrem uma deformação até igualarem a sua velocidade ~u
I
I
A seguir dá-se a restituição, quando os corpos recuperam a sua
forma ou ficam permanentemente deformado; durante o
choque só as forças de impacto contam e, pela Lei da
Acção/Reacção: ptot = mA vA + mB vB = mA vA0 + mB vB0 = Cte
R
Durante a deformação:
mA vA − P dt = mA u
R
Durante a restituição:
mA u − R dt = mA vA0
I
Similar para partı́cula B!
I
Paulo J. S. Gil (SMA, IST)
Mecânica de Partı́culas (Revisão)
IST, LEAero, Satélites
43 / 73
Dinâmica de uma Partı́cula
Força, Impulso e Quantidade de Movimento; Impactos
Coeficiente de Restituição
Definição de Coeficiente de Restituição
I
O coeficiente de restituição mede a variação de impulso nos
corpos entre a deformação e a restituição
R
R dt
e=R
P dt
(53)
I
O coeficiente de restituição mede a dissipação de energia (em
deformação plástica) 0 6 e 6 1
I
e = 1: deformação elástica (há conservação de energia)
I
e = 0: choque completamente inelástico; R = 0, partı́culas
seguem juntas
Paulo J. S. Gil (SMA, IST)
Mecânica de Partı́culas (Revisão)
IST, LEAero, Satélites
44 / 73
Dinâmica de uma Partı́cula
Força, Impulso e Quantidade de Movimento; Impactos
Choque Inelástico
I
Utilizando as equações do choque
Z
Z
mA vA − P dt = mA u,
mA u − R dt = mA vA0
para A e B obtém-se
R
R dt
u − vA0
R
,
=e=
vA − u
P dt
e=
u − vB0
vB − u
(54)
(55)
ou seja
vB0 − vA0 = e(vA − vB )
I
Impacto perfeitamente plástico (ptot = Cte)
e=0:
I
(56)
vB0 = vA0 = v 0 ,
mA vA + mB vB = (mA + mB )v 0 (57)
Impacto perfeitamente elástico (ptot = Cte, E = Cte)
e=1:
Paulo J. S. Gil (SMA, IST)
vB0 − vA0 = vA − vB
Mecânica de Partı́culas (Revisão)
(58)
IST, LEAero, Satélites
45 / 73
Força, Impulso e Quantidade de Movimento; Impactos
Dinâmica de uma Partı́cula
Impacto
Central Oblı́quo
Fonte: Beer & Johnston
Impacto Oblı́quo
I
I
Componentes tangenciais
mantêm-se inalteradas (choque
sem atrito)
I
Impulso faz variar apenas
componentes normais ao choque
Para além da conservação de quantidade de movimento tem-se:
(vA )t = (vA0 )t ,
(vB0 )n
−
(vA0 )n
(vB )t = (vB0 )t
(59a)
= e [(vA )n − (vB )n ]
(59b)
Fonte: Beer & Johnston
Paulo J. S. Gil (SMA, IST)
Mecânica de Partı́culas (Revisão)
IST, LEAero, Satélites
46 / 73
Exemplo: Choque de Asteróides
Ver aulas práticas
Dinâmica de uma Partı́cula
Trabalho e Energia
Trabalho Realizado por uma Força
I
Trabalho realizado por uma força
Z
~ · d~r
W = F
(60)
d~r é o deslocamento infinitesimal da força
I
~ é a força total aplicada na partı́cula
Se F
Z
~r2
Wtot =
~r1
~ · d~r =
F
Z
t2
t1
d~v
1
m
· ~v dt =
dt
2
1
1
= mv22 − mv12 = ∆Ec
2
2
Wtot = ∆Ec
Paulo J. S. Gil (SMA, IST)
Mecânica de Partı́culas (Revisão)
Z
t2
m
t1
d
(~v · ~v ) dt
dt
(61)
(62)
IST, LEAero, Satélites
48 / 73
Dinâmica de uma Partı́cula
Trabalho e Energia
Forças Conservativas
I
~ =F
~ (~r ) e a
Muitas vezes uma força só depende da posição F
~
quantidade F (~r ) · d~r é uma diferencial exacta
~ (~r ) · d~r = −dU(~r )
F
I
I
I
I
(63)
Tais forças dizem-se conservativas: derivam de uma função
escalar U(x, y , z) que só depende do ponto, a energia potencial
Trabalho realizado é independente da trajectória
Forças conservativas: em qualquer ponto e caminho tem-se
I
~ · d~r = 0
F
(64)
Se a força é conservativa então existe U(x, y , z):
Z
~ · d~r = − [U(~r2 ) − U(~r1 )] (65)
~
F
dW = F · d~r = −dU ⇒
Paulo J. S. Gil (SMA, IST)
Mecânica de Partı́culas (Revisão)
IST, LEAero, Satélites
49 / 73
Dinâmica de uma Partı́cula
Trabalho e Energia
Forças Conservativas
I
Referência de U
Z
~r
U=−
~ · d~r
F
(66)
~r0
I
Sinal menos: W > 0 ⇒ U decresce, há menos capacidade de
realizar trabalho; U definido a menos de uma constante
I
Teorema de Stokes e (64):
~ =0
∇×F
I
⇒
~ = −∇U
F
(67)
∂
∂
∂
Como ∇ = ~ex ∂x
+ ~ey ∂y
+ ~ez ∂z
, então Fx = − ∂U
∂x , etc. e
~ · d~r = −dU = −
F
∂U
∂U
∂U
dx +
dy +
dz
∂x
∂y
∂z
= −∇U · d~r
(68)
Paulo J. S. Gil (SMA, IST)
Mecânica de Partı́culas (Revisão)
IST, LEAero, Satélites
50 / 73
Dinâmica de uma Partı́cula
Trabalho e Energia
Conservação de Energia
I
~ é força conservativa e é a força total então
Se F
Z
~ · d~r = ∆Ec = −∆U ⇒
Wtot = F
Ec2 + U2 = Ec1 + U1
⇒
E = Ec + U = Cte
I
Força conservativa tem que ser a força resultante aplicadas
I
A energia mecânica total conserva-se:
E = Ec + U = Cte
I
(69)
(70)
Forças de atrito são exemplo de forças não conservativas e
portanto não existe conservação de energia quando existe atrito
Paulo J. S. Gil (SMA, IST)
Mecânica de Partı́culas (Revisão)
IST, LEAero, Satélites
51 / 73
Exemplo de Força Conservativa: Força Gravitacional
Ver aulas práticas
~ g = − GMm ~er
F
r2
(71)
~ = −∇U
F
(72)
∂
U só depende de r neste caso ⇒ ∇ = ~er ∂r
GMm
+C
(73)
r
Constante de integração C = 0: potencial zero no infinito
Potencial à superfı́cie da Terra r = R⊕ + h, h R⊕
GM
GMm
GMm
U=−
'−
+
mh + . . . ' |{z}
Cte +mgh (74)
R⊕ + h
R
R2
| {z⊕ } | {z⊕ }
→0
U(r ) = −
Cte
g
Energia Potencial Gravı́tica à Superfı́cie da Terra
Ver aulas práticas
2
~ g = − GMm ~er = − GMm R⊕ ~er = m~g
F
2
r2
r2
R⊕
R⊕
r
2
,
~g = −
GM
~e
2 r
R⊕
(75)
Energia potencial à altitude h
Z R⊕ +h
h
R⊕ 2
2
1
1
·d~r = mgR⊕ R⊕ − R⊕ +h = mg
U(h) = −
m~g
r
1 + Rh⊕
R⊕
(76)
R⊕ ' 6378 km
h R⊕ :
U(h) ' mgh
(77)
Mesmo h = 100km ⇒
mgh − mg 1+h h
R⊕
mgh
' 1.5%
(78)
Dinâmica de uma Partı́cula
Momento Angular e Momento de Forças
Momento Angular de uma Partı́cula
Momento Angular relativamente a um ponto é uma medida da
rotação em torno desse ponto i.e. do movimento tangencial ao ponto
~˙ = ~v
R
Momento Angular Relativo a A
z
m
~˙
~ A = ~r × mR
H
(79)
~r
~
R
A
~˙ é a velocidade medida no
Nota: R
R~A
referencial indicado. Se A se deslocar,
O
y H
~ A foi medido neste referencial e não no
que acompanha A
x
~ =R
~ A + ~r ⇒ R
~˙ = R
~˙ A + ~r˙ ,
~r˙ × m~r˙ = 0
R
(80)
A derivada do momento angular é
~˙ A = ~r × mR
~¨ + ~r˙ × mR
~˙ = ~r × mR
~¨ + ~r˙ × m(R
~˙ A + ~r˙ )
H
Paulo J. S. Gil (SMA, IST)
Mecânica de Partı́culas (Revisão)
(81)
IST, LEAero, Satélites
54 / 73
Dinâmica de uma Partı́cula
Momento Angular e Momento de Forças
Momento das Forças e Momento Angular
I
Seja o referencial Oxyz um Referencial de inércia
I
~ = mR
~¨ que actuam em m,
O momento das forças F
relativamente ao ponto A é, por definição,
~¨
~ A = ~r × F
~ = ~r × mR
M
I
(82)
Comparando com a expressão (81) da derivada do momento
angular
~˙ A = ~r × mR
~¨ + ~r˙ × mR
~˙ A
H
obtém-se
Paulo J. S. Gil (SMA, IST)
~A =H
~˙ A + R
~˙ A × m~r˙
M
Mecânica de Partı́culas (Revisão)
(83)
IST, LEAero, Satélites
55 / 73
Dinâmica de uma Partı́cula
Momento Angular e Momento de Forças
Momento das Forças e Momento Angular
~¨ A = 0, R
~ = ~r :
~˙ A = R
1. Ponto A fixo no espaço ⇒ R
~A =H
~˙ A ,
M
ou
~O =H
~˙ O
M
(84)
É o caso principal!
2. Ponto A move-se com velocidade constante (define um
~¨ = ~¨r
~¨ A = 0 ⇒ R
referencial de inércia), R
~ A = ~r × mR
~¨ = ~r × m~¨r = d ~r × m~r˙ − ~r˙ × m~r˙
M
| {z }
dt
(85)
=0
É o caso anterior no referencial inercial de A (explicar)
3. Outros casos:
~¨ e ~r ou R
~˙ e ~r˙ são paralelos, as equações (84) são válidas
3.1 Se R
(TPC: verificar. . . )
3.2 Caso de sistemas com muitas partı́culas e outros referenciais
estudado à parte — cf. Secção Sistemas de Partı́culas
Paulo J. S. Gil (SMA, IST)
Mecânica de Partı́culas (Revisão)
IST, LEAero, Satélites
56 / 73
Dinâmica de uma Partı́cula
Momento Angular e Momento de Forças
Impulso Angular
Analogamente ao caso da quantidade de movimento, o Impulso
angular iguala a variação de Momento angular
Z t2
~ A = ∆H
~A
~IA =
M
(86)
t1
Notas
I
Discussão de Momento Angular e Rotação
I
Durante um choque todos os momentos excepto os das forças
de impacto serão desprezáveis, logo
~ ponto de impacto = 0
∆H
Paulo J. S. Gil (SMA, IST)
⇒
~ ponto de impacto = Cte
H
Mecânica de Partı́culas (Revisão)
(87)
IST, LEAero, Satélites
57 / 73
Dinâmica de uma Partı́cula
Referenciais não Inerciais e Forças Inerciais
Referencial Terra e Pêndulo de Foucault
I
Referenciais não inerciais e forças
I
I
I
I
Os termos da diferença entre a aceleração nos referenciais
~ ) e não inercial são designados forças de inércia e
inercial (∝ F
sentidos no referencial não inercial como forças —
~ inercia ⇒ F
~ inercia = centrı́fuga, Coriolis, etc.
m~a0 = m~a + F
Efeitos da força de Coriolis: direcção predominante de ventos e
sentido predominante de tornados, correntes marı́timas, etc.
Sentido de rotação em lavatórios e banheiras não determinado
pela força de Coriolis — não é a força predominante. . .
Pêndulo de Foucault
I
I
I
Pêndulo suficientemente grande para a oscilação durar tempo
suficiente sem ser amortecida por atrito e resistência do ar
Efeito da força de Coriolis os pêndulos: plano vertical do
movimento roda na vertical
Perı́odo de rotação do plano: T = Ω⊕2π
sin λ onde Ω⊕ é a
velocidade angular da Terra e λ a latitude do lugar
Paulo J. S. Gil (SMA, IST)
Mecânica de Partı́culas (Revisão)
IST, LEAero, Satélites
58 / 73
Sistemas de Partı́culas
Sumário
Cinemática
Movimento e Referencial
Coordenadas Polares e Curvilı́neas
Referenciais Relativos
Referenciais e Variação com o Tempo
Velocidade e Aceleração Relativas
Aplicação: Referencial em Rotação Sı́ncrona
Dinâmica de uma Partı́cula
Leis de Newton do Movimento
Lei da Gravitação Universal
Órbitas Circulares
Órbitas LEO e MEO
Órbitas Geostacionárias
Força, Impulso e Quantidade de Movimento; Impactos
Trabalho e Energia
Energia Potencial Gravı́tica
Momento Angular e Momento de Forças
Referenciais não Inerciais e Forças Inerciais
Sistemas de Partı́culas
Introdução
Forças Internas e Externas
Centro de Massa e Momento Angular
O problema geral dos n corpos
Integrais do Movimento
Paulo J. S. Gil (SMA, IST)
Mecânica de Partı́culas (Revisão)
IST, LEAero, Satélites
59 / 73
Sistemas de Partı́culas
Introdução
Dinâmica de Sistemas de Partı́culas
Muitos dos conceitos da dinâmica de uma partı́cula são
generalizados imediatamente
I
A energia cinética é a soma das energias cinéticas de cada
partı́cula
I
A quantidade de movimento do sistema é a soma vectorial das
de todas as partı́culas
I
As forças agora estão aplicadas em diversas partı́culas
I
Se só há forças conservativas a energia potencial total é a soma
das de cada força
I
O momento angular total relativamente a um ponto é a soma
dos momentos angulares de todas as partı́culas
I
etc.
Paulo J. S. Gil (SMA, IST)
Mecânica de Partı́culas (Revisão)
IST, LEAero, Satélites
60 / 73
Sistemas de Partı́culas
Forças Internas e Externas
Forças Internas e Externas
mi
m1
~fij
~i
F
~fji = −~fij
mj
~j
F
I
Forças Externas: a sua
reacção está aplicada fora do
sistema
I
Forças Internas: ambas as
forças de acção/reacção
estão aplicadas no sistema
I
Sistema é o que se quiser. . .
mn
I
A soma das forças internas ~fij é nula pela Lei da Acção/Reação
pois cancelam-se aos pares
n
X
~fij = 0
(88)
i,j=1
i6=j
Paulo J. S. Gil (SMA, IST)
Mecânica de Partı́culas (Revisão)
IST, LEAero, Satélites
61 / 73
Sistemas de Partı́culas
Centro de Massa e Momento Angular
Força Total
I
mi
m1
~fij
~i
F
~fji = −~fij
mj
~j
F
Cada partı́cula tem aplicadas
uma força externa resultante
~ i e n − 1 forças internas fik
F
e
~ tot = mi~¨ri
F
(89)
i
~ tot = F
~i +
F
i
n
X
~fij
(90)
j=1
i6=j
mn
Somando todas as forças externas e sabendo que a soma de todas
as internas se anulam
n
n
n
X
X
X
def.
tot
~
~
Fi =
Fi =
mi~¨ri = m~¨rC
(91)
i=1
i=1
i=1
onde m é a massa do sistema e ~rC o Centro de massa do sistema.
Paulo J. S. Gil (SMA, IST)
Mecânica de Partı́culas (Revisão)
IST, LEAero, Satélites
62 / 73
Sistemas de Partı́culas
Centro de Massa e Momento Angular
Centro de Massa
Centro de Massa
mi
z
m1 ~ri
C
~r1
~rC
O
x
~fij
~rj
Pn
~i
F
~rC =
~fji = −~fij
mj
~j
F
ri
i=1 mi~
(92)
m
P
Por definição com m = mi
A equação da força fica
y
mn
n
X
~ i = m~¨rC
F
(93)
i=1
I
Centro de massa é a localização média pesada do sistema
I
O centro de massa move-se como se a massa total do sistema
estivesse concentrada e todas as forças externas actuassem nele
Paulo J. S. Gil (SMA, IST)
Mecânica de Partı́culas (Revisão)
IST, LEAero, Satélites
63 / 73
Sistemas de Partı́culas
Centro de Massa e Momento Angular
Momento Angular
mi
z
m1 ~ri
~r1
ρ
~i
C
~rC
O
x
~fij
~rj
~i
F
I
~fji = −~fij
mj
~j
F
Momento angular total
relativamente à origem
~O =
H
n
X
~ri × mi~r˙i
(94)
i=1
y
mn
i
I
Só dtd é considerada i.e. só o referencial de inércia {i} e outros
que não rodam
I
Mais considerações sobre o Momento Angular mais tarde
Paulo J. S. Gil (SMA, IST)
Mecânica de Partı́culas (Revisão)
IST, LEAero, Satélites
64 / 73
Sistemas de Partı́culas
O problema geral dos n corpos
O Problema dos n Corpos
mi
z
m1 ~ri
ρ
~i
~fij
C
~rC
~rj
~rj − ~ri
y
mn
I
Problema fundamental da
Mecânica Orbital
I
Formulação do problema:
qual o movimento de n
corpos sujeitos a forças
mútuas? e 1? e 2? e 3?
I
Aplicação: sistema solar
(explicar aproximações)
~fji = −~fij
mj
O
x
I
Considerar caso em que a única força é a gravı́tica; definições:
~ri − ~rj
(vector relativo)
rij = |~ri − ~rj |
(módulo do vector relativo)
(~ri − ~rj ) /rij
~fij = Gm1 m2 ~rj − ~ri
rij
rij2
Paulo J. S. Gil (SMA, IST)
(vector unitário)
(força da gravidade)
Mecânica de Partı́culas (Revisão)
IST, LEAero, Satélites
65 / 73
Sistemas de Partı́culas
O problema geral dos n corpos
Movimento do Centro de Massa
I
Segunda Lei de Newton aplicada à partı́cula i
mi~¨r =
n
X
Gmi mj ~rj − ~ri
rij
rij2
(95)
j=1
j6=i
I
I
Sistema com 3n graus de liberdade
Adicionando as equações do movimento de todas as partı́culas
n
X
i=1
I
mi~¨r =
n X
n
X
Gmi mj ~rj − ~ri
=0
rij
rij2
(96)
i=1 j=1
j6=i
pela terceira lei de Newton
Mas, num referencial de inércia,
n
X
def.
mi~¨r = m~¨rC
⇒
~¨rC = 0
(97)
i=1
Paulo J. S. Gil (SMA, IST)
Mecânica de Partı́culas (Revisão)
IST, LEAero, Satélites
66 / 73
Sistemas de Partı́culas
O problema geral dos n corpos
Referencial do Centro de Massa
I
O centro de massa desloca-se com velocidade constante num
referencial de inércia
~ 1t + C
~ 2 = ~v0 t + ~rC 0
~rC = C
(98)
Notas
I
As forças internas, as únicas existentes, não interferem no
movimento da média do sistema
I
Pode-se sempre utilizar o Referencial do Centro de Massa pois
ele é referencial de inércia, simplificando o problema — nesse
referencial C1 = C2 = 0 ⇒ ~rC = 0 (se CM também colocado na
origem)
Paulo J. S. Gil (SMA, IST)
Mecânica de Partı́culas (Revisão)
IST, LEAero, Satélites
67 / 73
Sistemas de Partı́culas
O problema geral dos n corpos
Momento Angular
I
Da derivada do momento angular relativamente à origem
resulta
!
n
n
n
id
X
X
X
~r˙i × mi~r˙i +
~ri × mi~¨ri
~ri × mi~r˙i =
| {z }
dt
i=1
i=1
=
n
X
~ri × ~fi =
i=1
I
I
=0
n
n
XX
i=1 j=1
j6=i
i=1
~rj − ~ri
Gmi mj
~ri ×
= 0 (99)
2
rij
rij
~ri × ~ri = 0 e ~rj − ~ri = −(~ri − ~rj ) anula as forças 2 a 2
Conclusão: o momento angular (relativamente a um ponto fixo
pois a origem é arbitrária) conserva-se
n
X
~ri × mi~r˙i = Cte
(100)
i=1
Paulo J. S. Gil (SMA, IST)
Mecânica de Partı́culas (Revisão)
IST, LEAero, Satélites
68 / 73
Sistemas de Partı́culas
O problema geral dos n corpos
Energia
I
Como a gravidade é uma força conservativa existe conservação
de energia mecânica
I
Fazendo o produto interno do vector velocidade com a força
~ i e somando
aplicada em cada partı́cula F
n
X
~i =
~r˙i · F
i=1
I
n
X
i=1
mi~r˙i · ~¨ri =
n X
n
X
Gmi mj
i=1 j=1
j6=i
rij3
~r˙i · (~rj − ~ri ) (101)
Do lado esquerdo de (101) resulta a variação da energia
cinética total
!
n
n
n
X
X
X
d
1
1
d
dT
2
~r˙i · ~r˙i =
mi~r˙i · ~¨ri =
mi
m i vi =
2 dt
dt
2
dt
i=1
i=1
i=1
(102)
Paulo J. S. Gil (SMA, IST)
Mecânica de Partı́culas (Revisão)
IST, LEAero, Satélites
69 / 73
Sistemas de Partı́culas
I
O problema geral dos n corpos
Do lado direito de (101) resulta
n X
n
X
Gmi mj
i=1 j=1
j6=i
rij3
n X
n
X
Gmi mj
d
d
~r˙i · (~rj −~ri ) =
=
(−U)
dt
rij
dt
i=1 j>i
(103)
I
TPC: demonstrar a expressão (103). . .
I
Da integração da equação (101) resulta então a conservação de
energia
E =T +U =
n
X
1
i=1
Paulo J. S. Gil (SMA, IST)
2
mi vi2
−
n X
n
X
Gmi mj
i=1 j>i
Mecânica de Partı́culas (Revisão)
rij
(104)
IST, LEAero, Satélites
70 / 73
Sistemas de Partı́culas
Integrais do Movimento
Resolução de problemas
Solução dos problemas
I
Integração das equações do movimento: nem sempre é fácil ou
possı́vel integrá-las directamente
I
Uma equação por grau de liberdade (qi = qi (t))
I
Problema de n corpos tem 3n graus de liberdade
Relações entre as coordenadas (generalizadas)
I
Problemas solúveis por quadratura: os que podem ser
completamente resolvidos em termos de funções elementares ou
integrais indefinidos — são raros!
I
Uma solução completa de um problema com 3n graus de
liberdade requer 6n constantes de integração — posições e
velocidades iniciais ou outras equivalentes (e.g. posições em 2
instantes diferentes de tempo)
Paulo J. S. Gil (SMA, IST)
Mecânica de Partı́culas (Revisão)
IST, LEAero, Satélites
71 / 73
Sistemas de Partı́culas
Integrais do Movimento
Integrais do Movimento
I
I
I
I
I
I
Por vezes os sistemas exibem certas caracterı́sticas que
permitem obter muita informação sobre o seu comportamento
sem obter uma solução completa das equações do movimento
(Primeiros) Integrais do Movimento são integrais contendo
derivadas das variáveis uma ordem inferior à que aparece nas
equações do movimento
Uma manipulação das equações do movimento ou uma
mudança adequada de variáveis pode revelar os integrais do
movimento de um sistema, se existirem
f (qi , q̇1 ) = C é um integral do movimento se das equações do
d
movimento se obtiver dt
(f (qi , q̇1 )) = 0; C é a constante de
integração, determinada por e.g. condições iniciais
C representa uma grandeza que se conserva — o integral do
movimento representa uma lei de Conservação
Se o número de integrais do movimento for igual ao de
condições iniciais, o problema fica completamente resolvido
Paulo J. S. Gil (SMA, IST)
Mecânica de Partı́culas (Revisão)
IST, LEAero, Satélites
72 / 73
Sistemas de Partı́culas
Integrais do Movimento
Integrais do Movimento e o Problema dos n Corpos
Solução do problema dos n corpos
I
A Energia, o Momento Angular e as posição e velocidade
iniciais do CM são Constantes do Movimento obtidos de
Integrais do Movimento
I
No problema dos n corpos há 10 integrais do movimento
I
Mas é necessário 6n constantes para resolver o problema
(equivalente aos vectores posição e velocidade iniciais para
cada partı́cula)
I
Possı́vel resolver completamente apenas até 2 corpos!
I
Nota: quando de fazem aproximações nas equações, os
integrais do movimento são alterados
Paulo J. S. Gil (SMA, IST)
Mecânica de Partı́culas (Revisão)
IST, LEAero, Satélites
73 / 73
Download