Slides for Chapter 11:
Coordination and Agreement
From Coulouris, Dollimore and Kindberg
Distributed Systems:
Concepts and Design
Edition 3, © Addison-Wesley 2001
Figure 11.1
A network partition
Cras hed
router
Instructor’s Guide for Coulouris, Dollimore and Kindberg Distributed Systems: Concepts and Design Edn. 3
© Addison-Wesley Publishers 2000
Figure 11.2
Server managing a mutual exclusion token for a set of processes
Queue of
reques ts
Server
4
2
1. Request
token
p
1
p2
3. Grant
token
2. Rel ease
token
p
3
Instructor’s Guide for Coulouris, Dollimore and Kindberg Distributed Systems: Concepts and Design Edn. 3
© Addison-Wesley Publishers 2000
p4
Figure 11.3
A ring of processes transferring a mutual exclusion token
p
1
p
2
p
n
p
3
p
4
T oken
Instructor’s Guide for Coulouris, Dollimore and Kindberg Distributed Systems: Concepts and Design Edn. 3
© Addison-Wesley Publishers 2000
Algoritmo de Ricart e Agrawala
Ricart e Agrawala [1981]
Implementa exclusão mútua distribuída entre N
processos.
usa “multicast” e clocks lógicos
Idéia básica: Processos que requerem entrar em
uma seção crítica “multicast” uma mensagem de
“request”, e pode entrar somente quando todos os
outros processos têm respondido a esta mensagem
de “request”.
Instructor’s Guide for Coulouris, Dollimore and Kindberg Distributed Systems: Concepts and Design Edn. 3
© Addison-Wesley Publishers 2000
Algoritmo de Ricart e Agrawala
As condições sob as quais um processo responde a um
“request” são projetadas para garantir que as condições
ME1(segurança), ME2(vivacidade)-ME3(ordenação) são
satisfeitas.
Os processos p1, p2,..., pN arcam com identificadores
numéricos distintos.
É assumido existirem canais de comunicação entre os
processos e cada processo guarda um clock lógico de
Lamport, atualizado de acordo com as regras LC1-LC4
(Cap10 – Tempo em SDs).
Instructor’s Guide for Coulouris, Dollimore and Kindberg Distributed Systems: Concepts and Design Edn. 3
© Addison-Wesley Publishers 2000
Algoritmo de Ricart e Agrawala
Mensagens de “request” são da forma <T,pi>, onde
T é o rótulo de tempo do processo enviando o
“request” e pi é o identificador do processo que
envia o “request”.
Cada processo registra seu estado em uma variável
state:
- de estar fora da seção crítica (RELEASED),
- esperando entrar na seção crítica (WANTED),
- ou estando na seção crítica (HELD)
Instructor’s Guide for Coulouris, Dollimore and Kindberg Distributed Systems: Concepts and Design Edn. 3
© Addison-Wesley Publishers 2000
Algoritmo de Ricart e Agrawala
Se um processo requisita entrar e o estado de todos
os processos é RELEASED, então todos os
processo responderão imediatamente ao “request” e
o processo requerente obterá a entrada na seção
crítica.
Se algum processo está em HELD, então aquele
processo não responderá a “requests” até que ele
tenha terminado sua seção crítica.
Instructor’s Guide for Coulouris, Dollimore and Kindberg Distributed Systems: Concepts and Design Edn. 3
© Addison-Wesley Publishers 2000
Algoritmo de Ricart e Agrawala
E assim, o processo requerente não pode ganhar a
entrada enquanto isso.
Se dois ou mais processos requerem entrar ao
mesmo tempo em suas seções críticas, então
qualquer que seja o processo requerente, aquele
que suporta o menor rótulo de tempo será o
primeiro a coletar N-1 respostas (replies),
concedendo a ele próxima entrada na seção crítica.
Instructor’s Guide for Coulouris, Dollimore and Kindberg Distributed Systems: Concepts and Design Edn. 3
© Addison-Wesley Publishers 2000
Algoritmo de Ricart e Agrawala
Se os “requests” têm rótulos de tempo iguais, os “requests”
são ordenados pelos identificadores correspondendo aos
processos.
Note que, quando um processo “requests” entrada, ele adia o
processamento de “requests” de outros processos até que
seu próprio “request” tenha sido enviado e ele tenha
registrado o rótulo de tempo T do “request”.
É assim que processos tomam decisões consistentes
quando processando “requests”.
Instructor’s Guide for Coulouris, Dollimore and Kindberg Distributed Systems: Concepts and Design Edn. 3
© Addison-Wesley Publishers 2000
Algoritmo de Ricart e Agrawala
O algoritmo alcança a propriedade ME1:
Se fosse possível para dois processos pi e pj (i
diferente de j) entrarem nas suas seções críticas ao
mesmo tempo, então ambos os processos teriam
que ter respondido ao outro.
Mas, visto que, os pares <Ti,pi> e <Tj,pj> são
totalmente ordenados, isto se torna impossível.
O algoritmo também satisfaz a ME2 e ME3.
Instructor’s Guide for Coulouris, Dollimore and Kindberg Distributed Systems: Concepts and Design Edn. 3
© Addison-Wesley Publishers 2000
Figure 11.4
Ricart and Agrawala’s algorithm
On initialization
state := RELEASED;
To enter the section
state := WANTED;
Multicast request to all processes;
request processing deferred here
T := request’s timestamp;
Wait until (number of replies received = (N – 1));
state := HELD;
On receipt of a request <Ti, pi> at pj (i ≠ j)
if (state = HELD or (state = WANTED and (T, pj) < (Ti, pi)))
then
queue request from pi without replying;
else
reply immediately to pi;
end if
To exit the critical section
state := RELEASED;
reply to any queued requests;
Instructor’s Guide for Coulouris, Dollimore and Kindberg Distributed Systems: Concepts and Design Edn. 3
© Addison-Wesley Publishers 2000
Algoritmo de Ricart e Agrawala
Para ilustar o algoritmo, considere a Figura 11.5,
seguinte.
Instructor’s Guide for Coulouris, Dollimore and Kindberg Distributed Systems: Concepts and Design Edn. 3
© Addison-Wesley Publishers 2000
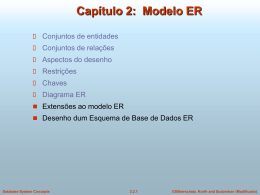
Figure 11.5
Multicast synchronization
41
p
41
p
3
Reply
1
34
Reply
34
Reply
41
p
34
2
Instructor’s Guide for Coulouris, Dollimore and Kindberg Distributed Systems: Concepts and Design Edn. 3
© Addison-Wesley Publishers 2000
Algoritmo de Ricart e Agrawala
Assuma que p3 não está interessado em entrar na
sua seção crítica.
P1 e p2 “requests” entrar concorrentemente.
O rótulo de tempo de p1, T1, é 41.
O rótulo de tempo de p2, T2, é 34.
Instructor’s Guide for Coulouris, Dollimore and Kindberg Distributed Systems: Concepts and Design Edn. 3
© Addison-Wesley Publishers 2000
Algoritmo de Ricart e Agrawala
Quando p3 recebe seus “requests”, ele responde
imediatamente, a p1 e a p2.
Quando p2 recebe o “request” de p1, ele descobre
que seu próprio “request” tem o rótilo de tempo
menor e assim, não “reply”, retendo p1 a esperar.
Contudo, p1 descobre que o “request” de p2 ^tem o
rótulo de tempo menor do que o seu próprio
“request” e assim responde imediatamente.
Instructor’s Guide for Coulouris, Dollimore and Kindberg Distributed Systems: Concepts and Design Edn. 3
© Addison-Wesley Publishers 2000
Algoritmo de Ricart e Agrawala
No recebimento do segundo “reply”, p2 pode então entar na
sua seção crítica.
Quando p2 sai da sua seção crítica, ele responderá ao
“request” de p1 e assim, concede a ele a entrada.
Para obter a entrada, o algoritmo proporciona 2(N-1)
mensagens, seguidas por (N-1) respostas.
A vantagem do algoritmo é que seu atraso de sincronização
é “round-trip syncronization”, ou seja, somente sobre o tempo
de ida-e-volta para transmissão das mensagens “requests” e
“replies”.
Instructor’s Guide for Coulouris, Dollimore and Kindberg Distributed Systems: Concepts and Design Edn. 3
© Addison-Wesley Publishers 2000
Figure 11.6
Maekawa’s algorithm – part 1
On initialization
state := RELEASED;
voted := FA LSE;
For pi to enter the critical section
state := WANTED;
Multicast request to all processes in Vi – {pi};
Wait until (number of replies received = (K – 1));
state := HELD;
On receipt of a request from pi at pj (i ≠ j)
if (state = HELD or voted = TRUE)
then
queue request from pi without replying;
else
send reply to pi;
voted := TRUE;
end if
Continues on next slide
Instructor’s Guide for Coulouris, Dollimore and Kindberg Distributed Systems: Concepts and Design Edn. 3
© Addison-Wesley Publishers 2000
Figure 11.6
Maekawa’s algorithm – part 2
For pi to exit the critical section
state := RELEASED;
Multicast release to all processes in Vi – {pi};
On receipt of a release from pi at pj (i ≠ j)
if (queue of requests is non-empty)
then
remove head of queue – from pk, say;
send reply to pk;
voted := TRUE;
else
voted := FALSE;
end if
Instructor’s Guide for Coulouris, Dollimore and Kindberg Distributed Systems: Concepts and Design Edn. 3
© Addison-Wesley Publishers 2000
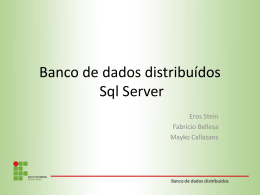
Figure 11.7
A ring-based election in progress
3
17
4
24
9
1
15
28
24
Note: The election was started by process 17.
The highest process identifier encountered so far is 24.
Participant processes are shown darkened
Instructor’s Guide for Coulouris, Dollimore and Kindberg Distributed Systems: Concepts and Design Edn. 3
© Addison-Wesley Publishers 2000
Figure 11.8
The bully algorithm
elect ion
The election of coordinator p2,
after the failure of p4 and then p3
C
elect ion
Stage 1
p
answer
1
p
p
2
p
3
4
answer
elect ion
elect ion
elect ion
C
Stage 2
p1
p
2
answer
p
3
p
4
timeout
Stage 3
p
p
1
Eventually. ... .
2
p
3
p
4
coordinator
C
Stage 4
p
1
p
2
p
Instructor’s Guide for Coulouris, Dollimore and Kindberg Distributed Systems: Concepts and Design Edn. 3
© Addison-Wesley Publishers 2000
3
p
4
Figure 11.9
Open and closed groups
Clos ed group
Instructor’s Guide for Coulouris, Dollimore and Kindberg Distributed Systems: Concepts and Design Edn. 3
© Addison-Wesley Publishers 2000
Open group
Figure 11.10
Reliable multicast algorithm
Instructor’s Guide for Coulouris, Dollimore and Kindberg Distributed Systems: Concepts and Design Edn. 3
© Addison-Wesley Publishers 2000
Figure 11.11
The hold-back queue for arriving multicast messages
Mes sage
proc es si ng
deli ver
Hold-bac k
queue
Incoming
mes sages
Deli very queue
When delivery
guarantees are
met
Instructor’s Guide for Coulouris, Dollimore and Kindberg Distributed Systems: Concepts and Design Edn. 3
© Addison-Wesley Publishers 2000
Figure 11.12
Total, FIFO and causal ordering of multicast messages
T1
Notice the consistent
ordering of totally ordered
messages T1 and T2,
the FIFO-related messages
F1 and F2 and the causally
related messages C1 and
C3
– and the otherwise
arbitrary delivery ordering of
messages.
T2
F1
F3
F2
T ime
C1
C2
P1
C3
P2
Instructor’s Guide for Coulouris, Dollimore and Kindberg Distributed Systems: Concepts and Design Edn. 3
© Addison-Wesley Publishers 2000
P3
Figure 11.13
Display from bulletin board program
Bulletin board:os.interesting
Item
From
Subject
23
A.Hanlon
Mach
24
G.Joseph
Microkernels
25
A.Hanlon
Re: Microkernels
26
T.L’Heureux
RPC performance
27
M.Walker
Re: Mach
end
Instructor’s Guide for Coulouris, Dollimore and Kindberg Distributed Systems: Concepts and Design Edn. 3
© Addison-Wesley Publishers 2000
Figure 11.14
Total ordering using a sequencer
Instructor’s Guide for Coulouris, Dollimore and Kindberg Distributed Systems: Concepts and Design Edn. 3
© Addison-Wesley Publishers 2000
Figure 11.15
The ISIS algorithm for total ordering
P2
1 Message
3
22
P4
1
3 Agreed Seq
1
2
P1
3
P3
Instructor’s Guide for Coulouris, Dollimore and Kindberg Distributed Systems: Concepts and Design Edn. 3
© Addison-Wesley Publishers 2000
Figure 11.16
Causal ordering using vector timestamps
Instructor’s Guide for Coulouris, Dollimore and Kindberg Distributed Systems: Concepts and Design Edn. 3
© Addison-Wesley Publishers 2000
Figure 11.17
Consensus for three processes
P1
d1 :=proc eed
d2 :=proc eed
P2
v2=proceed
v1 =proceed
1
Consens us algori thm
v3=abort
P3 (crashes)
Instructor’s Guide for Coulouris, Dollimore and Kindberg Distributed Systems: Concepts and Design Edn. 3
© Addison-Wesley Publishers 2000
Figure 11.18
Consensus in a synchronous system
Instructor’s Guide for Coulouris, Dollimore and Kindberg Distributed Systems: Concepts and Design Edn. 3
© Addison-Wesley Publishers 2000
Figure 11.19
Three byzantine generals
p1 (Commander)
p1 (Commander)
1:v
1:v
1:w
2:1:v
2:1:w
p3
p2
1:x
p2
3:1:u
p3
3:1:x
Faulty processes are shown shaded
Instructor’s Guide for Coulouris, Dollimore and Kindberg Distributed Systems: Concepts and Design Edn. 3
© Addison-Wesley Publishers 2000
Figure 11.20
Four byzantine generals
p1 (Commander)
p1 (Commander)
1:v
1:v
1:u
1:w
1:v
1:v
2:1:v
p2
2:1:u
p3
3:1:u
4:1:v
p2
4:1:v
2:1:v
4:1:v
3:1:w
p3
3:1:w
4:1:v
2:1:u
p4
3:1:w
p4
Faulty processes are shown shaded
Instructor’s Guide for Coulouris, Dollimore and Kindberg Distributed Systems: Concepts and Design Edn. 3
© Addison-Wesley Publishers 2000
Baixar