O Problema da Braquistócrona com Dissipação
Lúcio S. Fassarella, Willian S. Panni, Géssica L. Siqueira
Universidade Federal do Espírito Santo
Resumo
Formulação e resolução do problema da braquistócrona sob ação da gravidade e de forças dissipativas
do tipo viscosa e de atrito (dependentes da velocidade e da reação normal da curva, respectivamente).
Apresentamos uma abordagem segundo a teoria do controle ótimo, na qual formulamos e resolvemos
analiticamente o problema pela aplicação do Princípio do Máximo. Também apresentamos um algoritmo
para calcular aproximações do tempo de percurso mínimo e construir linhas poligonais inscritas na
braquistócrona, com implementação no software Mathematica.
Sumário
1 Introdução
2
2 Modelagem Matemática do Problema
5
3 Resolução Analítica via Princípio do Máximo
8
4 Resolução Numérica via Aproximação Poligonal
4.1 Introdução . . . . . . . . . . . . . . . . . . . . . . . . .
4.2 Movimento de uma partícula ao longo de um segmento
4.3 Tempo de percurso . . . . . . . . . . . . . . . . . . . .
4.4 Algoritmo . . . . . . . . . . . . . . . . . . . . . . . . .
5 Conclusão
. . . . .
de reta
. . . . .
. . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
10
10
10
11
15
16
A Teoria do Controle
18
A.1 Sistema de Controle e Problemas de Controle Ótimo . . . . . . . . . . . . . . . . . . . . . . . 18
A.2 Princípio do Máximo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
1
1
Introdução
Neste artigo, discutimos o Problema da Braquistócrona considerando efeitos dissipativos. Começamos pelo
enunciado preciso do problema:
Problema da Braquistócrona com Dissipação
Dados dois pontos numa região com campo gravitacional constante, determinar a trajetória
ao longo da qual uma partícula massiva vai do ponto mais alto ao ponto mais baixo no menor
tempo possível, sob ação da gravidade e de forças dissipativas de atrito e resistência do ar.
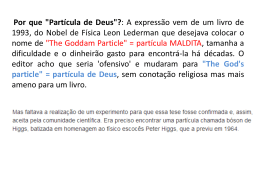
O Problema da Braquistócrona desconsiderando efeitos dissipativos foi proposto pela primeira vez por
Galileu em 16381 , mas foi em 1896 que o problema se tornou célebre, quando John (Johann ou Jean) Bernoulli
desa…ou os matemáticos contemporâneos a resolvê-lo [6, p.30]. Várias pessoas da época resolveram independentemente esse problema, dentre elas o próprio John Bernoulli, seu irmão James (Jacques or Jacobus)
Bernoulli2 , Gotfried Leibniz e Isaac Newton3 : a Braquistócrona é um segmento da ciclóide (invertida), cuja
parametrização em coordenadas cartesianas é dada explicitamente por
R3
7! a (
0
0.5
cos ) j 2 R2 :
sin ) i + a (
1
1.5
2
2.5
3
x
3.5
0
-0.5
-1
-1.5
y
-2
Arco de ciclóide com a = 1
Neste trabalho, obtemos uma solução analítica para o problema da Braquistócrona com efeitos dissipativos
pela aplicação do Princípio do Máximo da teoria do controle ótimo; também apresentamos um algoritmo
para construção de aproximações poligonais da Braquistócrona e estimar o tempo de percurso mínimo.
Ambas abordagens possuem formulações que independem das expressões das forças dissipativas, mas seus
desenvolvimentos requerem que sejam resolvidas equações diferenciais bastante sensíveis a tais expressões;
assim, podemos dizer que nossas abordagens são genéricas no sentido de que possuem adaptações naturais
1 Galileu
Galilei: Two New Sciences. 1938: pp.97, 212-213. Opus Cit. [6, p.30].
Bernoulli: Jacobi Bernoulli Solution problematum traternorum. Acta Eridotorum (Leipzig), May 1697: p.214.
3 Newton resolveu o problema anonimamente, mas sua autoria foi descoberta por Bernoulli, que disse poder “reconhecer o
leão pelo seu toque”[6, p.xiv]. Galileu, na obra Two New Sciences de 1938 (pp.97, 212-213), propôs erroneamente que a solução
do problema seria um arco de círculo [6, p.30].
2 J.
2
para quaisquer que sejam as expressões das forças dissipativas, mas essas expressões devem ser de…nidas
explicitamente em algum momento para que os cálculos possam ser completados.
Nossa motivação para usar o Princípio do Máximo da teoria do controle ótimo na resolução do problema
da Braquistócrona com efeitos dissipativos é o fato dele generalizar o Cálculo Variacional, adequado para
resolver o problema quando não há dissipação. Embora o Cálculo Variacional possa ser usado para resolver
o problema da Braquistócrona com dissipação (citamos referências abaixo), acreditamos que o Princípio do
Máximo nos permite uma abordagem mais abrangente do problema, passível de ser naturalmente adaptada
para resolver outros problemas mecânicos com dinâmicas não-conservativas.
No problema da Braquistócrona formulado como problema de controle ótimo, o tempo de percurso ao longo
das trajetórias que podem ser seguidas pela partícula é o índice de performance que deve ser minimizado.
Naturalmente pensamos na curvatura como variável de controle das trajetórias seguidas por uma partícula no
plano, motivados pelo Teorema Fundamental das Curvas Diferenciáveis (que estabelece uma correspondência
biunívoca entre funções contínuas de curvatura e curvas parametrizadas pelo comprimento de arco módulo
isometrias espaciais [?, Theorem p.19; Ex.9, p.24]). Entretanto, visando simpli…car os cálculos implicados
pelo Princípio do Máximo, acabamos por escolher como variável de controle a força de reação normal da
trajetória dividida pelo momento da partícula, a qual está relacionada a curvatura por uma função a…m
dependente da velocidade e aceleração.
Breve revisão bibliográ…ca
Segundo Goldstine [6, p.78], Euler abordou o problema da Braquistócrona para uma partícula sujeita a
uma força dissipativa já em meados do século XVIII, tendo resolvido o problema no caso em que essa força
é do tipo viscosa e proporcional a uma potência par da velocidade.4
Pars [14, p.241] resolve o Problema da Braquistócrona para uma partícula sob ação da gravidade e de
uma força de resistência dependente da velocidade; a solução de Pars é discutida em [10].
Ashby et.al. [1], Hayen [8], Šalinić [17] e Lipp [11] resolvem o Problema da Braquistócrona para uma
partícula sujeita a uma força de atrito coulombiana (sem considerar viscosidade) usando diferentes técnicas.
Ashby et.al. [1] e Hayen [8] resolvem o problema no âmbito do cálculo variacional (sem restrições), mas
tratam somente do caso em que a rapidez (norma da velocidade) inicial é nula. Lipp [11] formula o problema
em termos da teoria do controle ótimo, usando como variável de controle o ângulo de inclinação da trajetória
(i.e., o ângulo entre a velocidade da partícula e o eixo-x) e resolve o problema mediante o Princípio do
Mínimo (versão alternativa do Princípio do Máximo). Šalinić [17] aborda o problema como um problema
variacional com restrições; nessa abordagem, o ângulo de inclinação da trajetória é usado como parâmetro, o
problema é transformado num problema sem restrições pela introdução de variáveis auxiliares e as equações
de Euler-Lagrange são resolvidas pelo método da evolução diferencial.
Golubev [7] aborda o Problema da Braquistócrona para uma partícula sob ação da gravidade, de uma
força de viscosidade linear na velocidade e de uma força de atrito coulombiana. Ele formula o problema em
termos da teoria do controle usando como variável de controle a força de reação normal da trajetória dividida
pela rapidez da partícula e resolve o problema recorrendo ao Princípio do Máximo (“Okhotsimsky–Pontryagin
method ”). Nossa abordagem e método de resolução analíticos são similares aos dele:
“The problem is reformulated in terms of control theory, and as the control the normal
component of the reaction of the support curve is chosen. This gives the opportunity to obtain
necessary optimality conditions and completely investigate them, to obtain analytically the equation of brachistochrones in a parametric form, to …nd the attainability domain and the motion
time, to formulate a numerical procedure for calculating optimal trajectories, and for certain
particular values of friction coe¢ cients to demonstrate their form.” Golubev, [7].
4 L. Euler: Methodus Inveniendi Lineas Curvas Maximi Minimive Proprietate Guadentes sive Solutio Problematis Isoperimetrici Latissimo Sensu Accepti de 1744.
3
Giambò e Gianonni [5] consideram o problema da braquistócrona sob ação de um potencial arbitrário e
força de viscosidade dependente da velocidade. Além de obter explicitamente a braquistócrona no caso em
que a força de viscosidade depende linearmente da velocidade, eles também caracterizam as condições que
garantem a existência e a unicidade da braquistócrona mediante técnicas da Análise Funcional.
Outras referências que tratam do problema da braquistócrona com dissipação, mas que não foram discutidas aqui são: [9], [18], [19].
Estrutura do Texto
Na Seção 2, o problema da braquistócrona com dissipação é modelado matematicamente, com a introdução
de variáveis, parâmetros e funções adequados; nessa seção também deduzimos algumas relações e resultados
necessários para os desenvolvimentos subsequentes. Na Seção 3, formulamos o problema em termos da
teoria do controle ótimo, usando a curvatura da trajetória como variável de controle; aplicamos o Princípio
do Máximo e obtemos a solução analítica do problema. Na Seção 4 construimos um algoritmo para calcular
aproximações poligonais da braquistócrona, o que requer a resolução da equação de movimento de uma
partícula que se desloca ao longo de segmentos de reta sob ação das forças de gravidade, de atrito e da
resistência do ar. Na Seção 5 discutimos os resultados e comentamos tópicos relacionados. O Apêndice A
apresenta o Princípio do Máximo utilizado na parte principal do texto.
4
2
Modelagem Matemática do Problema
Nesta seção, modelamos matematicamente o problema da Braquistócrona com dissipação
decorrente da ação das forças de atrito e de resistência do ar. Aqui, caracterizamos a trajetória
seguida pela partícula por sua curvatura e deduzimos a equação de movimento da partícula em
termos de suas coordenadas cartesianas.
Consideramos o problema da Braquistócrona no qual a velocidade inicial da partícula é paralela ao
plano vertical que contem os pontos inicial e …nal da trajetória, caso em que a trajetória da partícula …ca
inteiramente contida nesse plano.
Para modelar matematicamente o problema, escolhemos o sistema de eixos cartesianos com o eixo das
ordenadas tendo orientação vertical e sentido para cima e o eixo das absissas tendo orientação horizontal,
com respeito ao qual as posições inicial e …nal da partícula são dadas por, respectivamente,
r0 = (0; h) ; r> = (d; 0) :
Denotamos o tempo por t e de…nimos as seguintes funções, parâmetros e variáveis:
Trajetória da partícula:
r (t) = (x (t) ; y (t)) ;
Posição inicial, posição …nal e velocidade inicial:
r0 = (0; h) ; r| = (d; 0) ; r_ 0 = (x_ 0 ; y_ 0 ) ;
Equação de movimento (2 a Lei de Newton):
m•
r = Fg + Far + Fat + Fn ;
onde:
– m : massa da partícula (constante positiva);
– Fg : força peso;
– Fn : força de reação normal da trajetória;
– Far : força de resistência do ar;
– Fat : força de atrito.
Denotamos a derivada em relação ao tempo por um ponto, de modo que a posição, velocidade e aceleração
da partícula são dadas por
r = (x; y) ; r_ = (x;
_ y)
_ ; •
r = (•
x; y•) :
(2.1)
A rapidez (norma da velocidade) e os campos de vetores tangente e normal da trajetória são dados por:
v = k_rk =
p
r_
x_ 2 + y_ 2 ; T =
=v
k_rk
1
(x;
_ y)
_ ; N=v
Forças atuantes na partícula
Força normal:
Fn = Fn N
= Fvn ( y;
_ x)
_ ;
5
1
( y;
_ x)
_ :
(2.2)
Força da gravidade:
Fg = mg
= (0; mg) ;
Força de resistência do ar, dependente da rapidez v da partícula mediante uma função não-negativa
' (v):
Far =
' (v) T
_ y)
_ ;
= '(v)
v (x;
Força de atrito, dependente da intensidade Fn da força de reação normal mediante uma função nãonegativa (Fn ):
Fat =
(Fn ) T
(Fn )
=
(x;
_ y)
_ ;
v
Equação de movimento:
1
1
1
Far + Fat + Fn :
m
m
m
•
r=g+
Agora, deduziremos a relação entre a curvatura da trajetória e a intensidade da força de reação normal
(para uso posterior).
Pela equação de movimento, temos
1
1
1
Far N + Fat N + Fn N
m
m
m
1
= g N + Fn N
m
g
Fn
=
x_ +
:
v
m
•
r N = g N+
Como
(•
x; y•) v 1 ( y;
_ x)
_
1
(x•
_ y y•
_ x) ;
v
•
r N =
=
segue
1
(x•
_y
v
y•
_ x) =
g
Fn
x_ +
:
v
m
Portanto:
mg
m
x_ +
(x•
_ y y•
_ x) :
v
v
Considerando a Geometria Diferencial [4, Exercice 12, p.25], a curvatura da trajetória r = (x; y) é dada por:
Fn =
k=
x•
_y
y•
_x
v3
:
Segue que a relação entre a intensidade da força normal e a curvatura da trajetória é dada por:
Fn =
mg
x_ + mv 2 k:
v
Observação 1 Observamos que Fn pode assumir valores positivos, nulo ou negativos –de modo que a norma
da força normal é dada por
kFn k = jFn j :
6
Coordenadas cartesianas da equação de movimento
' (v)
(x;
_ y)
_
mv
(•
x; y•) = (0; g)
Equivalentemente,
(
(Fn )
Fn
(x;
_ y)
_ +
( y;
_ x)
_ :
mv
mv
x
•=
y• =
'(v)+ (Fn )
Fn
x_ mv
y_
mv
(Fn )
Fn
g '(v)+
y
_
+
_
mv
mv x
Fn =
m
mg
x_ +
(x•
_y
v
v
onde
:
y•
_ x) :
(2.3)
(2.4)
Lema 1 O Sistema 2.3 é redundante, i.e., toda solução de uma equação é também solução da outra!
Prova. Suponha que (x (t) ; y (t)) seja solução da primeira equação do sistema 2.3; multiplicando essa
equação por y=
_ x_ e usando que v 2 = x_ 2 + y_ 2 , obtemos:
y_
x
• =
x_
y_
x_
=
=
=
' (v) + (Fn )
Fn
x_
y_
mv
mv
' (v) + (Fn )
Fn y_ 2
y_
mv
mv x_
' (v) + (Fn )
Fn v 2 x_ 2
y_
mv
mv
x_
' (v) + (Fn )
Fn v
Fn
y_
+
x:
_
mv
m x_
mv
De 2.4, segue
Fn v
y_
= g + y•
x
•:
m x_
x_
Substituindo essa identidade na igualdade precedente, segue
y_
x
•=
x_
' (v) + (Fn )
y_
mv
g
y• +
y_
Fn
x
•+
x;
_
x_
mv
donde segue 2.3:
y• =
g
' (v) + (Fn )
Fn
y_ +
x:
_
mv
mv
Problema 1 (Braquistócrona com Dissipação) Determinar a trajetória
[0; T ] 3 t 7! r (t) = (x (t) ; y (t)) 2 R2
para a qual que T > 0 seja mínimo e que cumpra
8
(Fn )
Fn
x_ mv
y_
x
• = '(v)+
>
mv
>
>
>
<
(Fn )
Fn
;
y• = g '(v)+
y_ + mv
x_
mv
>
>
>
>
:
x (0) = 0; y (0) = h > 0; x (T ) = d > 0; y (T ) = 0
sendo Fn a força de reação normal e k a curvatura da trajetória:
Fn =
mg
x•
_ y y•
_x
x_ + mv 2 k; k =
:
v
v3
7
3
Resolução Analítica via Princípio do Máximo
Nesta seção, resolvermos o Problema da Braquistócrona com Dissipação pelo Princípio do
Máximo (o Teorema ??). Cálculos intermediários extensivos estão registrados na Subseção (??).
Para enquadrarmos o Problema 1 no formato do Princípio do Máximo (Teorema 1), de…nimos:
Variáveis de estado:
z = (z1 ; z2 ; z3 ; z4 ) 2 R4 ; z1 := x; z2 = y; z3 = x;
_ z4 = y:
_
Variável de controle:
Fn
:
mv
w
Lagrangeano:
R4
L:R
R ! R ; L (t; z; k) = 1:
Variedades de restrição nos estados inicial e …nal:
R4 ; S> = (d; 0;
S0 = f(0; h; x_ 0 ; y_ 0 )g
3; 4)
2 R4 =
3; 4
2R
R4 :
S0 é uma variedade regular degenerada (num ponto) e Sf é uma variedade regular:
1
S> =
1
1
(0) \
2
(0) ;
onde
1;
2
: R4 ! R;
1
(z) = z1
d;
2
(z) = z2 :
Função dinâmica:
f : R4
onde
1
z3
C
z4
C;
1
A
('
(v)
+
(vw))
z
wz
3
4
mv
1
g mv
(' (v) + (vw)) z4 + wz3
0
B
R ! R4 ; f (z; k) = B
@
v=
q
z32 + z42 :
Com essas de…nições, o Problema 1 assume a forma:
8
RT
>
Minimizar J [w (t)] = 0 dt
>
<
sujeito as condições:
>
z_ = f (z; w)
>
:
z (0) = S0 ; z (T ) 2 S> :
(3.1)
Nesse caso, o Hamiltoniano relacionado é dado por:
H (t; z; ; w) =
=
0 L (z; k)
0
+
1 z3
+
+
+
=
0
+
h
1
+
(3.2)
f (z; k)
2 z4
4
h
+
g
h
'(v)+ (mvw)
z3 wz4
mv
i
'(v)+ (mvw)
z4 + wz3
mv
3
'(v)+ (mvw)
h mv
2
w
3
3
+w
g+
4
i
i
z3 +
'(v)+ (mvw)
mv
4
+
i
z4 :
Para podermos desenvolver os cálculos subsequentes, temos que explicitar as expressões de ' (v) e
Assumiremos as seguintes condições:
8
(Fn )!
A força de atrito é do tipo Coulombiana, i.e., proporcional a intensidade da força normal:
(Fn ) :=
jFn j = mv jwj ; onde
> 0;
A força de resistência do ar é proporcional a velocidade
' (v) = v; onde
> 0:
Nesse caso, o Hamiltoniano assume a forma:
i
h
h
+ jwj 3 + w 4 z3 + 2 w 3
H (t; z; ; k) = 0 + 1
m
Escrevemos:
H (t; z; ; w) = A (z; ; ) w + B (z; ) ;
onde
e
8
< A (z; ; ) =
:
B (z; ) =
4 z3
3 z4
(w) (
3 z3
+
g+
m
+ jwj
4
i
z4
(3.3)
(3.4)
4 z4 ) ;
(3.5)
0+
1
m
z3 +
3
2
g+
4
m
z4 ;
(w) = sinal de w:
~ T~ é solução desse Problema (??), então existem uma constante
Pelo Princípio do Máximo ??, se z~; k;
h
i
~ 0 0 e uma função ~ : 0; T~ ! R4 satisfazendo as condições seguintes:
1. Condição de minimalidade:
H t; z~; ~ ; w
~ = min H t; z~; ~ ; w ; 8t 2 0; T ; 8 2 R4 ;
w
2. Condição de transversalidade:
H 0; x
~ (0) ; u
~ (0) ; ~ 0 ; ~ (0) = 0 = H T~; x
~ T~ ; u
~ T~ ; ~ 0 ; ~ T~
;
3. Condição de ortogonalidade:
~ (0) 2 R4 ; ~ T~ =
dim Sf
X
k=1
k
d k
= ( 1;
dx x~(T~)
2 ; 0; 0)
4. Condição de não-acoplamento:
~ 0 + ~ 2 + ~ 2 + ~ 2 + ~ 2 6= 0;
1
2
3
4
5. Sistema dinâmico (omitindo o subescrito “~”):
8
z_1 = z3
>
>
>
>
z_2 = z4
>
>
>
>
+ w z3 wz4
z_3 =
>
>
< z_ = g m
4
m + w z4 + wz3
_
>
1 =0
>
>
_2 = 0
>
>
>
>
>
_
>
w
1 + m + jwj
3
> 3=
:
_4 =
+
w
+
+
jwj
2
3
m
(3.6)
4
4:
Como o Hamiltoniano é linear no controle, a condição de mínimo para o controle ótimo implica:
A (z; ; (w))
0
4 z3
3 z4
= (w) (
3 z3
+
4 z4 ) :
Com isso, nosso problema está reduzido a resolver o sistema Eq.?? com a identidade Eq.3.7.
9
(3.7)
Resolução Numérica via Aproximação Poligonal
4
4.1
Introdução
Nesta seção, vamos obter aproximações poligonais da Braquistócrona.
4.2
Movimento de uma partícula ao longo de um segmento de reta
Considere dois pontos do plano
p0 = (x0 ; y0 ) ; p1 = (x1 ; y1 ) :
(4.1)
Parametrizamos o segmento de reta p0 p1 que liga esses pontos por
r (s) = p0 + s (p1
p0 ) ;
(4.2)
em termos de coordenadas:
x (s) = x0 + (x1
y (s) = y0 + (y1
x0 ) s
; 0
y0 ) s
s
1:
(4.3)
Para uso adiante, registramos as derivadas:
r0 (s) = p1
p0 ; r00 (s) = 0;
(4.4)
e
d
d2
d2
d
(4.5)
x = x1 x0 ; y 0 =
y = y1 y0 ; x00 = 2 x = 0 ; y 00 = 2 y = 0:
ds
ds
ds
ds
Assim, o movimento da partícula ao longo do segmento p0 p1 é caracterizado pela função s = s (t), determinada pela equação de movimento Eq.(2.3).
x0 =
Para deduzirmos a equação diferencial que caracteriza s (t), calculamos
x_ =
y_ =
e
(
x
•=
y• =
d
_ 0 = (x1
dt x (s (t)) = sx
d
_ 0 = (y1
dt y (s (t)) = sy
d2
dt22 x (s (t))
d
dt2 y (s (t))
=
=
d
dt
d
dt
x0 ) s_
y0 ) s;
_
(4.6)
(sx
_ 0 ) = s•x0 + s_ 2 x00 = (x1
(sy
_ 0 ) = s•y 0 + s_ 2 y 00 = (y1
Substituindo Eq.(4.6) nas identidades Eq.(2.2), obtemos
q
p
v = x_ 2 + y_ 2 = jsj
_ ;
:= (x1
2
x0 ) + (y1
x0 ) s•
y0 ) s•:
(4.7)
2
y0 ) :
(4.8)
Assumindo s_ > 0, substituindo Eq.(4.6) na expressão Eq.(2.4), obtemos:5
Fn =
mg
(x1
x0 ) :
(4.9)
Substituindo as identidades Eq.(4.7), Eq.(4.8), Eq.(4.9) na equação de movimento Eq.(2.3), obtemos:
5 Explicitamente:
Fn
=
=
=
mg
m
x_ +
(x•
_ y y•
_ x)
v
v
mg
m
(x1 x0 ) s_ +
((x1
jsj
_
v
mg
s_
(x1 x0 )
:
jsj
_
x0 ) s_ (y1
10
y0 ) s•
(y1
y0 ) s_ (x1
x0 ) s•)
8
< s• =
: s• =
1
m
g
h
i
mg
g
' ( s)
_ +
(x1 x0 )
y0 )
2 (y1
h
i
:
2
(x
mg
g
1
' ( s)
_ +
(x1 x0 ) + 2 y11 xy00)
m
(4.10)
Pelo Lema 1, basta considerarmos uma das equações –vamos escolher a primeira:
s• =
mg
' ( s)
_ +
(x1
1
m
x0 )
g
2
(y1
y0 ) :
(4.11)
Daqui por diante, vamos considerar que a força de resistência do ar e a força de atrito da trajetória
sejam dadas pelas seguintes expressões:
' (v) = v ;
(Fn ) = Fn
(4.12)
Nesse caso, a equação 4.11 reduz-se a seguinte equação:
s• +
m
g
s_ + z = 0 ; z :=
( (x1
2
x0 ) + (y1
y0 )) :
(4.13)
A solução dessa equação é dada por:
mt
s (t) = C2 e
mz
t + C1
(4.14)
Determinamos as constantes de integração em termos de condições iniciais:
s (0) = 0
s_ (0) = v0 =
Assim:
s (t) =
v0
m
C1 =
+
mz
1
C2 =
e
mv0
+
mz
mt
m2 z
2
t; t
:
(4.15)
0:
(4.16)
Para uso adiante, registramos:
v0
s_ (t) =
4.3
+
mz
e
mz
mt
; t
0:
(4.17)
Tempo de percurso
Naturalmente, o tempo de percurso de uma poligonal física é a soma dos tempos de percurso de cada um
dos seus segmentos.
Para determinar o tempo de percurso de um segmento da poligonal física, temos que especi…car a velocidade inicial (além das coordenadas dos vértices inicial e …nal).
Se v0 > 0, o tempo
de percurso do segmento p0 p1 é caracterizado pela condição
s ( ) = 1;
Explicitamente,
> 0;
é uma solução positiva da equação
v0
+
m
z
1
e
m
11
z
m
= 0:
(4.18)
Se < 1, então a velocidade no …nal do percurso de…nida pelas expressões Eq.(4.8) e Eq.(4.17) é, explicitamente:6
z :
(4.19)
v1 = s_ ( ) = v0
m
Para uso na proposição seguinte, de…nimos o discriminante da solução Eq.(4.16) e equação Eq.(4.18):
v0
$ :=
Proposição 1 Assumindo m > 0;
nas seguintes situações:
+
mz
:
(4.20)
> 0; v0 > 0, a equação transcendental Eq.(4.18) possui solução
i) Caso $ = 0, Eq.(4.18) reduz-se a uma equação linear para
=
v0
>0
com solução explicitamente dada por
;
ii) Caso $ < 0, a Eq.(4.18) constitui uma equação transcendental que possui uma (única) solução positiva;
iii) Caso $ > 0, temos os seguintes subcasos:
a) mv0 < z < 0: a Eq.(4.18) constitui uma equação transcendental que possui uma (única) solução
positiva;
b) z = 0: a Eq.( 4.18) possui uma (única) solução positiva se, e somente se,
mv0
> 0;
Nesse caso,a solução é dada explicitamente por7
=
m
mv0
mv0
ln
; mv0
> 0;
c) z > 0: a Eq.(4.18) constitui uma equação transcendental que possui uma (única) solução positiva
se, e somente se,
v0
m
mz
+ z ln
0;
m
mz + v0
6 Realmente,
da Eq.(4.18) temos
v0
+
m
z
e
=
m
v0
+
m
z
z
m
substituindo nas equações Eq.(4.8) e Eq.(4.17), obtemos:
v1
=
s_ (t)
v0
=
v0
=
=
7A
v0
+
+
mz
m
m
z
e
m
m
0.
12
mz
mz
z
z :
Eq.(4.18) não possui solução positiva caso z = 0 e mv0
t
;
Prova. Caso i) Se $ = 0, então
mz
v0
=
e a equação Eq.(4.18) reduz-se a
z =
;
m
donde concluimos que sua única solução é positiva e dada por
=
> 0:
v0
Caso ii) Se $ < 0, então
v0
< 0:
m
z<
Considere a função auxiliar, cujo zero positivo corresponde ao tempo de percurso
v0
f (t) =
m
+
z
1
e
mt
zt
m
; t
> 0:
0:
Então
f (0) =
e8
f_ (t) =
v0
m
m
mz
+
mt
e
z
v0
:
m
Portanto, f é crescente; como f (0) < 0 e f ( =v0 ) > 0, concluimos que f possui um único zero e este cumpre
0<
<
v0
:
Caso iii) Se $ > 0, então
v0
:
m
z>
Considere a função auxiliar, cujo zero positivo corresponde ao tempo de percurso
v0
f (t) =
+
m
z
1
e
mt
zt
m
; t
> 0:
0:
Então:
f (0) =
e
f_ (t) =
v0
m
+
m
mz
e
mt
z:
Temos que considerar 3 subcasos:
Caso iii–a) mv0 < z < 0. Nesse caso,
f_ (t) =
v0
m
+
mz
e
mt
z>
z > 0; 8t
0:
Portanto, f é crescente; como f (0) < 0 e f ( =m jzj) > 0, concluimos que f possui um único zero e este
cumpre
0<
8 Para
<
m jzj
:
obtermos a desigualdade, substituimos na expressão de f_ a parcela
t ! 1.
13
z por
v0 = (m ) e depois tomamos o limite
Caso iii-b)
v0
m
< z = 0. Nesse caso, f reduz-se a
v0
f (t) =
1
e
mt
m
:
Portanto, f é crescente, possui um único zero se, e somente se,
mv0 >
;
situação em que seu único zero é dado por
=
m
mv0
mv0
ln
:
Caso iii-c) z > 0. Consideramos a derivada de f :
v0
f 0 (t) =
m
Como f 0 (0) = v0 =m > 0 e limt!1 f 0 (t) =
possui (pelo menos) um zero
> 0:
v0
m
+
m
z e
+
m
z e
mt
z
z < 0, segue do Teorema do Valor Intermediário que f 0
z = 0 ()
m
=
m
ln
mz
:
mz + v0
Como f 0 possui um único zero
e muda seu sinal de positivo para negativo nesse zero, segue que
é ponto
de máximo global de f ! Como f (0) =
=m < 0 e
é ponto de máximo local de f , segue do Teorema do
Valor Intermediário que f possui zero positivo se, e somente se, f ( ) 0. Calculamos o valor de f em :
f(
)
=
=
=
=
v0
v0
+
+
m
m
v0
m
v0
m
z
1
e
v0
z
+
m
z e
m
m
ln
z
m
S egue da iden tidade
z
+z
z
m
( v0 + m z)e
mz
mz + v0
Concluimos que no caso em questão, f possui zero se, e somente se,
v0
m
+z
m
ln
14
mz
mz + v0
0:
m
m
=mz
4.4
Algoritmo
(*) Parâmetros
m; g; ; ; h; d; vo;
(*) Funções Auxiliares
q
2
2
[x1; y1; x2; y2] := (x2 x1) + (y2 y1) ;
g
z [x1; y1; x2; y2] := 2 [x1;y1;x2;y2] ( (x2 x1) + (y2 y1)) ;
v
+ m z [x1; y1; x2; y2] ;
w [x1; y1; x2; y2; v] := [x1;y1;x2;y2]
r [x1; y1; x2; y2; v] :=
v
[x1;y1;x2;y2]
m
v0
m
EQT [x1; y1; x2; y2; v; ]
+
z
+
m
1
[x1;y1;x2;y2] z[x1;y1;x2;y2]
z [x1; y1; x2; y2] ln m m[x1;y1;x2;y2]
z[x1;y1;x2;y2]+ v ;
e
m
z
m;
(*) FUNÇÃO ET = Função Tempo de Percurso de Segmento
ET [x1; y1; x2; y2; v] := solução da equação EQT [x1; y1; x2; y2; v; ] = 0 na variável ;
(*) FUNÇÃO TS = Tempo de Percurso de Segmento
T S[x1; y1; x2; y2; v] :=
fSe [w[x1; y1; x2; y2; v] = 0; então ET [x1; y1; x2; y2; v]; senão
Se [w[x1; y1; x2; y2; v] < 0; então ET [x1; y1; x2; y2; v]; senão
Se [ ( v)=(m [x1; y1; x2; y2]) < z[x1; y1; x2; y2] < 0; então ET [x1; y1; x2; y2; v]; senão
Se [z[x1; y1; x2; y2] = 0 ^ (m v
[x1; y1; x2; y2]) > 0; então ET [x1; y1; x2; y2; v]; senão
Se [z[x1; y1; x2; y2] > 0 ^ r[x1; y1; x2; y2; v] 0; então ET [x1; y1; x2; y2; v]; senão
1]
]
]
]
]g
(*) FUNÇÃO VF = Velocidade Final
V F [x1; y1; x2; y2; v] = v m [x1; y1; x2; y2] [x1; y1; x2; y2] z[x1; y1; x2; y2] T S[x1; y1; x2; y2; v]:
(*) ROTINA TT = Tempo Total de Percurso de Trajetória Poligonal
(*) Argumento a 2: número subdivisões no intervalo [0; d];
(*) Argumento b 1: número de subdivisões no intervalo [0; h];
(*) Argumento J: lista com a + 1 inteiros variando entre b e b;
T T [a; b; J] :=
fT 1; W; K; X; Y g (*) parâmetros auxiliares
T 1 = 0;
W = vo;
K = 0;
X[ ] := (
1) d=a;
Y [ ] := J h=b;
Para i = 1 até i = a, faça: [
Se [T 1 + T S[X[i]; Y [i]; X[i + 1]; Y [i + 1]; W ] < 1;
então f
T 1 = T 1 + T S[X[i]; Y [i]; X[i + 1]; Y [i + 1]; W ];
W = W + V F [X[i]; Y [i]; X[i + 1]; Y [i + 1]; W ];
K = ig
senão f
T 1 = 1;
W = 0;
K = ig
]
]:
15
5
Conclusão
Neste trabalho, descrevemos o problema da Braquistócrona considerando efeitos dissipativos, apresentamos
uma resolução analítica baseada no Princípio do Máximo da teoria do controle ótimo e desenvolvemos um
algoritmo para construir aproximações poligonais da trajetória e calcular aproximações numéricas do tempo
de percurso mínimo.
O problema mostrou ter solução singular, característica relacionada ao fato do Hamiltoniano ser linear na
variável de controle (curvatura da trajetória ou força de reação normal dividida pelo momento da partícula).
Destacamos algumas diferenças técnicas entre a Braquistócrona sem dissipação e com dissipação:
1. A Braquistócrona sem dissipação possui a propriedade de que a taxa de variação do ângulo de inclinação
da trajetória é constante [3].
2. Braquistócrona sem dissipação possui a propriedade de que seus segmentos também são braquistócronas
do problema reduzido (cujas condições de contorno são de…nidas pelos extremos do segmento e pela
rapidez da partícula ao longo da braquistócrona original ao passar pelo primeiro extremo do segmento)
–já que todos os seus segmentos são arcos de ciclóide.
Desenvolvimentos
Alguns desenvolvimentos naturais desse trabalho são:
i) Apresentar uma demonstração simpli…cada do Princípio do Máximo, conforme utilizado aqui;
ii) Estabelecer condições necessárias e su…cientes para a existência da braquistócrona, em função das
condições de contorno, da velocidade inicial da partícula e dos valores da aceleração gravitacional e do
parâmetros de dissipação;
iii) Analisar casos particulares: caso ideal (forças de atrito e de resistência do ar nulas, = 0 e = 0),
na ausência de força de resistência do ar ( = 0) e na ausência de força de atrito ( = 0).
iv) Realizar testes da solução obtida, comparando o tempo mínimo calculado com o tempo de percurso
de trajetórias alternativas.
v) Demonstrar que a Braquistócrona pode ser aproximada por linhas poligonais, como de…nidas na Seção
4.
vi) Aperfeiçoar o algoritmo para construção de aproximações poligonais da Braquistócrona, visando
torná-lo mais e…ciente; há pelo menos duas alternativas promissoras:
vi.a) exprimir o tempo de percurso de um segmento de reta em termos de uma função transcendental,
em substituição resolução da equação transcendental que caracteriza esse tempo;
vi.b) delimitar o conjunto das linhas poligonais que o algoritmo deve analisar na busca por minimizar o
tempo de percurso, usando algum critério preestabelecido teoricamente para excluir linhas poligonais;
vii) Comparar o algoritmo elaborado com outras propostas de abordagens numéricas, tais como a discretização das trajetórias com o auxílio do algoritmo de Davidon-Fletcher-Powell tratada em [16] para o
problema da Braquistócrona sujeita a fricção coulombiana.
Breve discussão de formulações alternativas
Uma formulação natural para o problema da Braquistócrona com dissipação consiste em assumir que a
trajetória da solução é dada pelo grá…co de uma função y = y (x), sendo x função do tempo (ou de um
parâmetro arbitrário do qual o tempo também seja dependente). Nesse caso, temos
p
_
y_ = y 0 x_ ; y• = y 0 x
• + y 00 x_ 2 ; v = 1 + y 02 jxj
e as equações de movimento reduzem-se a:
8
y0
>
• = 1+y
y 00 x_ 2 + g
02
< x
>
: y• =
g+
'(x)
p
m 1 + y 0 (x)2
p
f (v)
1
1+y 02 m
1+y 02
f (v)y 0
p
m 1 + y 0 (x)2
Destacamos os seguintes desenvolvimentos possíveis para essa ideia:
16
y 00 x_ 2 + g
g(v)y 0
p
m 1 + y 0 (x)2
Podemos considerar o problema como do tipo variacional com restrições caracterizadas pelas equações
de movimento. Como nesse caso, as equações de movimento são de segunda ordem, há (pelo menos)
duas alternativas para prosseguir:
– Reduzir a ordem da equação de movimento pela introdução de variáveis auxiliares e introduzir
multiplicadores de Lagrange para obter o problema variacional sem restrições.
– Introduzir multiplicadores de Lagrande para obter o problema variacional sem restrições (sem
reduzir a ordem da equação de movimento) e considerar termos de superfície na resolução das
equações de Euler Lagrange (análogo ao que é feito em [1]);
Podemos considerar o problema como de controle ótimo, reduzindo a ordem do sistema pela introdução
de variáveis auxiliares. Nesse caso, as formulações alternativas são de…nidas pela escolha da variável
de controle:
– Uma alternativa natural é considerar y = y (x) e sua derivada como variáveis de controle, já que
dy=dx aparece explicitamente nas equações de movimento.9
– Em [11], Lipp usa como variável de controle o ângulo de inclinação da trajetória (i.e., o ângulo
entre a velocidade da partícula e o eixo-x); como a derivada temporal desse ângulo aparece
explicitamente nas equações de movimento, essa função é interpretada como nova variável de
controle para que se possa aplicar o Princípio do Mínimo (versão alternativa do Princípio do
Máximo).
– Em [7], Golubev usa como variável de controle a força de reação normal da trajetória dividida
pela rapidez da partícula; nesse caso, não é necessário utilizar
– Aqui, nós usamos a curvatura da trajetória como (única) variável de controle do problema de
controle ótimo e recorremos ao Princípio do Máximo para resolvê-lo.
9 Podemos imaginar usar dy=dx como variável de controle sem mencionar y (x), já que este não aparece explicitamente nas
equações de movimento; entretanto, nesse caso teríamos que levar em conta as restrições em dy=dx decorrentes das condições
de contorno sobre y (x), i.e.,
Z d
(dy=dx) dx = d:
0
17
A
A.1
Teoria do Controle
Sistema de Controle e Problemas de Controle Ótimo
Sistemas de controle são sistemas dinâmicos cuja dinâmica pode ser modulada por uma função
dependente do tempo, visando determinar/delimitar deliberadamente seu comportamento.10 A
teoria dos sistemas de controle é bastante vasta e possui inumeráveis aplicações nas mais variadas
áreas cientí…cas. Aqui, nos limitamos a apresentar os conceitos básicos necessários para de…nir
problemas de controle ótimo e enunciar e discutir o Princípio do Máximo. Para maiores detalhes,
recomendamos [2] e [12].
De…nição 1 (Sistema de Controle) Um sistema de controle é um sistema dinâmico (z; u; f ) da forma
d
z (t) = f (t; z (t) ; u (t))
dt
(A.1)
onde:
z:I !V, V
Rn aberto é uma função integrável, chamada variável de estado;
u :I ! U , U
Rm aberto, é uma função integrável, chamada variável de controle;
f : I V U ! Rn , I R intervalo aberto, é uma função integrável, chamada função característica,.
O contra-domínio V da variável de estado é chamado espaço de estados e o contra-domíno U da
variável de controle é chamado espaço de controle.
Geralmente, exigimos que a variável de estado seja diferenciável por partes e que a variável de controle
seja seja contínua por partes. Nesse caso, escrevemos
z (t) 2 Cp1 I; V
onde
; u (t) 2 Cp0 I; U
Cp1 I; V = funções diferenciáveis por partes de I em V ;
Cp0 I; U = funções contínuas por partes de I em U :
A teoria do controle básica estuda conceitos tais como controlabilidade, observabilidade e estabilidade.
Aqui, nos restringimos aos termos da teoria do controle ótimo.
De…nição 2 (Problema de Controle Ótimo) Considere um sistema de controle (z; u; f ),
d
z (t) = f (t; z (t) ; u (t))
dt
com função característica
f :V
U
[0; 1) ! Rn :
Índice de performance. O índice de performance é uma função do tipo
J : [0; 1)
Cp1
I; V
Cp0
I; U ! R; J [T; z (t) ; u (t)] =
Z
T
L (t; z (t) ; u (t)) dt + M (T; z (T )) ;
0
de…nida por um par de funções contínuas
L : [0; 1)
1 0 Aqui,
V
U ! R ; M : [0; 1)
nos restringimos a considerar sistemas de controle com tempo contínuo.
18
V ! R:
Condições de contorno. De…nidas por subvariedades regulares de Rn contidas em V (i.e., 0 é valor
regular de G0 e G [13, De…nition 1, p.52; Proposition 2, p.59]):
S0 = V ou S0 = G0 1 (0) com S0
S = V ou S = G
1
(0) com S
V; G0 : V ! Rn
V; G : V ! Rn
a
; a = dim S0 2 f0; 1; :::; n
1g ;
b
1g
; b = dim S0 2 f0; 1; :::; n
:
Finalmente, o problema de controle ótimo de…nido por f , L, M , S0 e S consiste em determinar um
controle u (t) 2 Cp0 [0; T ] ; U
Rm que determina um estado do sistema minimiza o índice de performance.
Em síntese:
8
RT
>
Minimizar J [u (t)] := J [T; zu (t) ; u (t)] = 0 L (t; zu (t) ; u (t)) dt + M (zu (T ) ; T ) ;
>
>
>
< sujeito a:
P = P (f ; L; M ; S0 ; S ) :
I T 0; u 2 Cp0 [0; T ] ; U ;
>
d
>
>
> I dt zu (t) = f (t; zu (t) ; u (t)) 8t 2 (0; T ) ;
:
I zu (t) 2 V; zu (0) 2 S0 ; zu (T ) 2 S :
O instante …nal (a duração do processo) T 0 pode ser predeterminado ou não: caso T seja predeterminado,
ele é tratado como parâmetro do problema; caso T não seja predeterminado, ele é tratado como variável a
ser determinada na resolução do problema.11
Observação 2 Escolhendo L 1 para T > 0 indeterminado, o problema se reduz ao problema de minimizar
do tempo para o sistema controlado evoluir do estado inicial z0 ao estado …nal z1 .
A.2
Princípio do Máximo
O Princípio do Máximo pode ser aplicado na resolução de problemas de controle ótimo bastante gerais, com restrições (ou não) nas variáveis de estado e de controle.
Essencialmente, para dado sistema de controle com índice de performance que se pretende
maximizar (ou minimizar), o Princípio do Máximo estabelece que controle ótimo deve ser um valor
crítico do Hamiltoniano do sistema. O Hamiltoniano é um funcional dependente das variáveis
de estado e controle, construido em termos da dinâmica e do índice de performance do sistema.
Denotando o Hamiltoniano por H e a variável de controle por u, vale o seguinte resultado no
caso em que H é uma função convexa de u: a condição @H=@u = 0 é necessária para o controle
ser ótimo e, nesse caso, a condição @ 2 H=@u2 < 0 (respectivamente, @ 2 H=@u2 > 0) é su…ciente
para maximizar (respectivamente, minimizar) o índice de performance.
De…nição 3 (Hamiltoniano) O Hamiltoniano associado ao Problema (2) é a aplicação
H : [0; 1)
V
U
R
Rn ! R
de…nida por
H (t; z; u;
0;
) :=
0 L (t; z; u)
+
f (t; z; u) ;
n
onde “ ” denota o produto interno em R .
Teorema 1 (Princípio do Máximo) Considere o Problema (2) com M
h
i
seja um controle ótimo e seja ~
z : 0; T~ ! Rn o correspondente estado.
h
i
Então existem ~ 0 0 constante e ~ : 0; T~ ! Rn tais que valem:
1 1 Dizemos
h
i
0. Suponha que u
~ : 0; T~ ! U
que o problema é de horizonte …nito quando T não é predeterminado ou quando ele é um valor …nito predeterminado
(T < 1); dizemos que o problema é de horizonte in…nito quando T é predeterminado como in…nito (T = 1).
19
1. ~
z (t) satisfaz o sistema dinâmico:
d
z (t)
dt ~
= f (t; ~
z (t) ; u
~ (t)) ; t 2 (0; t)
z~ (0) = z~0 2 S0 ; z~ (T ) = z~1 2 Sf
2. ~ (t) satisfaz o sistema adjunto:
d~
(t) =
dt
onde
@
~ 0 @ L (t; ~
z (t) ; u
~ (t)) + ~ (t)
f (t; ~
z (t) ; u
~ (t)) ; t 2 (0; t)
@z
@z
n
~
X @fk
@
@ ~
~k
f =
f=
=
@z
@z
@z
k=1
n
X
~ k @fk ; :::;
@z1
k=1
n
X
k=1
~ k @fk
@zn
!
;
3. Condição de mínimo:
H t; ~
z (t) ; u
~ (t) ; ~ 0 ; ~ (t)
h
i
H t; ~
z (t) ; u; ~ 0 ; ~ (t) ; 8t 2 0; T~ q:t:p; 8u 2 U ;
4. Condição de transversalidade:
H 0; z (0) ; u
~ (0) ; ~ 0 ; ~ (0) = 0 = H T~; z T~ ; u
~ T~ ; ~ 0 ; ~ T~
;
5. Condições de ortogonalidade:12
~ (0) ? S0 ; ~ T~ ? S|
6. Condição de não-acoplamento:
~ 0 + ~ (T ) 6= 0:
Observação 3 Dizemos que a solução do problema é patológica quando
patológicas, podemos assumir que 0 = 1 (pois a equação vinculando 0 e
= 0. Para as soluções nãoé linear em ambas variáveis).
0
~
Lema 2 Nas condições do Teorema (1), seja u
~ (t) um controle ótimo e sejam ~
z (t) e
0 ; (t) o estado e
coestado correspondentes.
Então:
d
@
H t; ~
z (t) ; u
~ (t) ; 0 ; ~ (t) = H t; ~
z (t) ; u
~ (t) ; 0 ; ~ (t) :
dt
@t
Em particular, se o Hamiltoniano não depende explicitamente do tempo, então ele permanece constante
ao longo da solução ótima:
H t; ~
z (t) ; u
~ (t) ;
1 2 No
0;
~ (t) = H 0; ~
z (0) ; u
~ (0) ;
0;
~ (0) ; 8t 2 [0; T ] :
caso em que S0 e S| são superfícies de nível, as condições de ortogonalidade reduzem-se as seguintes:
~ (0) =
n X
dim S0
k=1
s0k
d
0
k
dz
; ~ T~ =
n dim S|
X
k=1
z(0)
20
s0k
d
k
dz
z(T~ )
; s0k ; s0j = 1; 2; :::
Referências
[1] A. Ashby, W.E. Brittin, W.F. Love, W. Wyss: Brachistochrone with Coulomb Friction. Am. J. Phys.,
Vol.43, No.10 (October 1975): 902-905. DOI:10.1119/1.9976.
[2] J. Baumeister, A. Leitão: Introdução à Teoria do Controle e Programação Dinâmica – 1a . ed. IMPA:
Rio de Janeiro, 2008.
[3] A.E. Bryson Jr., Y.-C. Ho: Applied Optimal Control: Optimization, Estimation and Control (rev. ed.).
Hemisphere Publishing: Washington, 1975.
[4] M.P. do Carmo: Di¤ erential Geometry of Curves and Surfaces. Prentice-Hall, Inc.: New Jersey, 1976.
[5] R. Giambò, F. Giannoni: The brachistochrone problem with frictional forces. ESAIM Control Optim.
Calc. Var., Vol. 5 (2000): 187-206 (electronic). DOI:10.1051/cocv:2000107.
[6] H.H. Goldstine: A History of the Calculus of Variations from the 17th through the 19th Century.
Springer-Verlag: New York, 1980.
[7] Yu. F. Golubev: Brachistochrone with friction. Journal of Computer and Systems Sciences International,
Vol. 49, Issue 5 (October 2010): 719-730. DOI:10.1134/S1064230710050060.
[8] J.C. Hayen: Brachistochrone with Coulomb Friction. Int. J. Nonlinear Mechanics 40(8) (2005): 10571075.
[9] A.M.A. Vander Heijden, J.D. Diepstraten: On the brachystochrone with dry friction. Int. J. Nonlinear
Mech. 10 (1975): 97–112.
[10] S.E. Jones, T.M. Antanackovic, M. Dehn: Remarks on the brachistochrone with viscous friction. Am. J.
Phys., Vol. 56 (1988): 758. DOI:10.1119/1.15465.
[11] S.C. Lipp: Brachistochrone with Coulomb friction. SIAM J. Control Optim., Vol. 35, No.2 (1997):
562-84. DOI:10.1137/S0363012995287957.
[12] A. Locatelli: Optimal Control – an introduction. Birkhäuser Verlag, 2001.
[13] M.P. do Carmo: Di¤ erential Geometry of Curves and Surfaces. Prentice-Hall, 1976.
[14] L.A. Pars: An Introduction to the Calculus of Variations. Wiley: New York, 1962.
[15] L. S. Pontryagin, V. G. Boltyanskii, R. V. Gamkrelidze, E. F. Mishchenko: The Mathematical Theory
of Optimal Processes. Pergamon Press, 1964.
[16] S. Ramamani, W.-S. Lu, B. Tabarrok: Optimization of a discretized brachistochrone problem. Internat.
J. Mech. Engr. Education, 19 (1990): pp. 79–87.
[17] Slaviša, Šalinic: Contribution to the brachistochrone problem with Coulomb friction. Acta Mechanica,
Vol. 208, No.1. (1 November 2009): 97-115. DOI:10.1007/s00707-008-0134-3.
[18] B. Vratanar, M. Saje: On the analytical solution of the brachistochrone problem in a nonconservative
…eld. Int. J. Nonlinear Mech. 33(3) (1998): 489–505.
[19] C.M. Wensrich: Evolutionary solutions to the brachistochrone problem with Coulomb friction. Mech.
Res. Commun. 31 (2004): 151–159.
21
Baixar