Projeto Reenge - Eng. Elétrica
Apostila de Sistemas de Controle I
IV-1
&$3Ì78/2 ,9
“MODELAGEM MATEMÁTICA DE SISTEMAS DINÂMICOS”
4.1- INTRODUÇÃO
Inicialmente é necessário que se defina o que é sistema, sistema dinâmico e sistema estático.
Um SISTEMA é uma combinação de componentes que atuam em conjunto para satisfazer um objetivo
especificado. O sistema é dito ESTÁTICO, quando a saída atual do sistema depende somente da entrada atual. A saída do sistema só varia se a sua entrada variar.
O sistema é dito DINÂMICO, se a sua saída depende da entrada e dos valores passados da
entrada. Num sistema dinâmico a saída varia se ela não estiver num ponto de equilíbrio, mesmo que
nenhuma entrada esteja sendo aplicada.
O modelo matemático de um sistema dinâmico é definido como sendo o conjunto de equações que representam a dinâmica do sistema com uma certa precisão. O modelo matemático de um
dado sistema não é único, isto é, um sistema pode ser representado por diferentes modelos dependendo da análise que se deseja fazer.
Na obtenção do modelo matemático para um dado sistema deve-se ter um compromisso entre a simplicidade do modelo e a sua precisão. Nenhum modelo matemático, por mais preciso que
seja, consegue representar completamente um sistema.
Em geral deve-se obter um modelo matemático, que seja adequado para solucionar o problema específico que esta em análise. Porém, é importante ressaltar que os resultados obtidos desta
análise serão válidos somente para os casos em que o modelo é válido.
Quando vamos obter um modelo simplificado de um sistema, geralmente ignoramos algumas
propriedades físicas deste sistema. Se os efeitos que estas propriedades causam na resposta do sistema são pequenos, então uma boa semelhança entre os resultados da análise matemática e os resultados práticos do sistema é obtido.
Em geral os sistemas dinâmicos são não lineares. Porém, os procedimentos matemáticos para
a obtenção de solução de modelos lineares são muito complicados. Por isto, geralmente substituí-se
o modelo não linear por um modelo linear, com validade somente em uma região limitada de operação, ou para um ponto de operação.
A obtenção dos modelos que representam um dado sistema, são baseados nas leis que regem
aquele sistema. Por exemplo, na modelagem de um sistema mecânico, deve-se ter em mente as leis
de Newton; na modelagem de sistemas elétricos deve-se ter em mente as leis das correntes e das
tensões de Kirchoff; na modelagem de sistemas térmicos deve-se ter mente as leis que regem os fenômenos térmicos, isto é, condução, radiação e convenção, etc...
Neste capítulo, nos preocupamos com a modelagem de sistemas mecânicos de translação e
rotação e sistemas eletromecânicos. A modelagem de outros sistemas físicos, tais como, sistemas
térmicos e sistemas hidráulicos não serão objeto de análise.
4.2- MODELAGEM MATEMÁTICA DE SISTEMAS MECÂNICOS
Os sistemas mecânicos são divididos em dois grupos, isto é, sistemas mecânicos de translação, e sistemas mecânicos de rotação. A seguir, alguns conceitos importantes relativos a sistemas
mecânicos, serão revisados.
- Massa
A massa de um corpo, é a quantidade de matéria deste corpo, a qual é constante. Fisicamente, a massa de um corpo é responsável pela inércia do mesmo, isto é, a resistência à mudança de movimento de um corpo. O peso de um corpo, é a força com a qual a terra exerce atração deste corpo.
Prof. Hélio Leães Hey - 1997
Projeto Reenge - Eng. Elétrica
Apostila de Sistemas de Controle I
m=
ω
g
IV-2
Onde:
m é massa (Kg)
ω é o peso (Kgf)
g é a aceleração da gravidade (≈ 9,81 m/s2)
Embora o peso de um corpo possa variar de um ponto para outro, a massa do mesmo não
varia.
- Força
A força é definida como a causa que tende a produzir uma mudança na posição de um corpo,
no qual a força está atuando. As forças, podem ser classificadas de duas formas, FORÇAS DE
CONTATO e FORÇAS DE CAMPO. As forças de contato são aquelas que tem um contato direto com o
corpo, enquanto as forças de campo não apresentam contato direto com o corpo, como por exemplo, força magnética e força gravitacional.
- Torque
O torque, é definido como qualquer causa que tende a produzir uma mudança na posição
angular (rotacional) de um corpo, no qual o torque esteja atuando.
- Deslocamento, Velocidade e Aceleração
O deslocamento χ ( t ) é a troca de posição de um ponto, tomado como referência, para outro.
A velocidade é a derivada temporal do deslocamento χ ( t ) .
ϑ( t) =
d χ( t ) = χ( t )
dt
A aceleração é a derivada temporal da velocidade:
dϑ ( t ) d 2 χ ( t )
a( t ) =
=
∴ a ( t ) = ϑ ( t ) = χ ( t )
dt
dt 2
- Deslocamento Angular, Velocidade Angular e Aceleração Angular
O deslocamento angular “θ(t)”, é definido como a troca de posição angular, sobre um eixo,
de um ângulo tomado como referência e outro. É medido em radianos. A direção anti-horário é tomada como positiva.
A velocidade angular “ω(t)”, é a derivada temporal do deslocamento angular “θ(t)”.
ω( t ) =
dθ( t ) = θ( t )
dt
A aceleração angular “α (t)”, é a derivada temporal da velocidade angular “ω”.
dω( t ) d 2 θ( t )
( t )
( t ) = θ
α( t ) =
=
∴ α( t ) = ω
dt
dt 2
Prof. Hélio Leães Hey - 1997
Projeto Reenge - Eng. Elétrica
Apostila de Sistemas de Controle I
IV-3
Obs:
Se a velocidade ou a velocidade angular é medida em relação a uma referência fixa, então
chamamos de velocidade absoluta ou velocidade angular absoluta. Caso contrário serão grandezas
relativas. O mesmo é válido para a aceleração.
LEIS DE NEWTON
Das três leis que foram formuladas por Newton, a segunda lei é a mais importante, para a
obtenção de modelos matemáticos de sistemas mecânicos.
- Segunda lei de Newton (Translação)
“A aceleração adquirida por de qualquer corpo rígido é diretamente proporcional as forças
que atuam neste corpo, e inversamente proporcional a massa deste corpo”.
Σ forças = m.a
- Segunda lei de Newton (Rotação)
“A aceleração angular de qualquer corpo rígido é diretamente proporcional aos torques que
atuam neste corpo, e inversamente proporcional ao momento de inércia deste corpo”.
ΣT = Jα
Onde: J → Momento de inércia;
4.2.1- SISTEMAS MECÂNICOS DE TRANSLAÇÃO
Nos sistemas mecânicos de translação, há três elementos mecânicos envolvidos que são: elemento de inércia, elemento de amortecimento, elemento de elasticidade.
- Elemento de Inércia (Massa)
M → massa;
f (t) → força aplicada;
χ(t) → deslocamento.
É assumido que a massa é rígida. Desta forma a conexão superior, não deve se mover em
relação a conexão inferior, isto é, ambas conexões se deslocam segundo χ(t).
dϑ ( t )
d 2 χ( t )
=M
f ( t ) = M. a ( t ) = m
dt 2
dt
Onde:
a(t) → aceleração; ϑ(t) → velocidade; χ(t)→ deslocamento.
Prof. Hélio Leães Hey - 1997
Projeto Reenge - Eng. Elétrica
Apostila de Sistemas de Controle I
IV-4
- Elemento de Amortecimento (Amortecedor)
No caso deste elemento existe um deslocamento relativo entre o
ponto de conexão superior e o ponto de conexão inferior. Portanto,
existe a necessidade de duas variáveis deslocamento para descrever este
elemento. A realização física deste elemento é a fricção viscosa associada ao óleo ou ar.
Força de Amortecimento
d χ1 ( t) d χ 2 (t )
−
f ( t ) = B
dt
dt
f(t) = B(ϑ1(t)- ϑ2(t))
B → Coeficiente de amortecimento;
ϑ1(t) → Velocidade relativa ao deslocamento χ 1 ( t )
ϑ2(t) → Velocidade relativa ao deslocamento χ 2 ( t ) .
- Elemento de Elasticidade (Mola)
Este elemento, pode ser deformado por uma força externa, tal
que a deformação é diretamente proporcional a esta força.
f ( t ) = K( χ 1 ( t ) − χ 2 ( t ))
Força de elasticidade
Uma vez que os elementos mecânicos dos movimentos de translação estão definidos, as
equações de sistemas mecânicos de translação podem ser escritas seguindo as leis de Newton.
Ex1:
d 2 χ( t )
d χ( t )
= f ( t) − B
− K χ ( t)
M
2
dt
dt
Neste sistema, três forças exercem influências sobre a massa M: força aplicada f(t), a força de
amortecimento e a força de elasticidade.
A função de transferência , pode ser obtida, considerando-se a força aplicada como entrada e
o deslocamento χ ( t ) como saída.
F(s) = MS2X(s) + BSX(s) + KX(s)
X(s)
1
= G (s) =
=
2
F(s)
MS + BS + K
Prof. Hélio Leães Hey - 1997
1M
B
K
S2 + S +
M
M
Projeto Reenge - Eng. Elétrica
Apostila de Sistemas de Controle I
IV-5
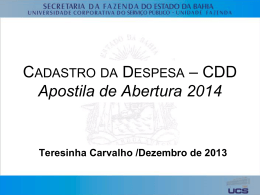
Ex2:
Este sistema mecânico, é o modelo simplificado de um
sistema de suspensão de uma das rodas de um automóvel, onde:
M1 → Massa do automóvel;
M2 → Massa do roda;
K1 → Cte de elasticidade (mola);
K2 → Cte de elasticidade (pneu);
B → Cte de amortecimento (amortecedores).
Se observarmos a figura, existem 2 deslocamentos independentes χ 1 ( t ) e χ 2 ( t ) . Isto significa
que, conhecer o deslocamento χ 1 ( t ) não implica em conhecer o deslocamento χ 2 ( t ) . Portanto devese escrever 2 equações.
d. χ 1 ( t ) d. χ 2 ( t )
d 2 χ1 ( t)
χ
χ
=
−
(
−
)
−
−
M1
K
(
t
)
(
t
)
B
1
2
1
dt
dt
dt 2
“1”
d χ 2 ( t ) d χ 1( t )
d 2 χ 2 (t )
− K 2 χ 2 ( t)
= f ( t ) − K 1 ( χ 2 ( t ) − χ 1 ( t )) − B
−
M2
2
dt
dt
dt
“2”
Supondo que deseja-se obter a função de transferência entre a força aplicada f(t) e o deslocamento do carro χ 1 ( t ) .
M1S2X1(s) = - K1(X1(s) - X2(s)) - B(SX1(s) - SX2(s))
“3”
M2S2X2(s) = F(s) - K1(X2(s) - X1(s)) - B(SX2(s) - SX1(s)) - K2X2(s)
“4”
Pela equação “3”; resulta X1(s)(M1S2 + K1 + BS) = X2(s)(K1 + BS)
X 1 (s) =
BS + K 1
. X (s)
M 1S 2 + BS + K 1 2
“5”
Pela equação “4”, resulta X2(s)(M2S2 + K1 + K2 + BS) = F(s) + (K1 + BS)X1(s)
X 2 (s) =
BS + K 1
1
. F(s) +
X (s)
2
M 2 S + BS + K 1 + K 2
M 2 S + BS + K 1 + K 2 1
2
X 1 (s) = G 1 (s). X 2 (s)
“5”
X 2 (s) = G 2 (s). X 1 (s) + G 3 (s). F(s)
“6”
As equações “5” e “6” fornecem as seguintes representações:
Prof. Hélio Leães Hey - 1997
“6”
Projeto Reenge - Eng. Elétrica
Apostila de Sistemas de Controle I
IV-6
⇒
Diagrama de blocos
⇒
Gráficos de fluxo de sinais
Caminho direto: M1 = G1. G3
Laços individuais: La = G1. G2
Determinante do sistema: ∆ = 1 − G 1G 2
Função de transferência:
X1
G 1G 3
=
F 1 − G 1G 2
Onde:
G1G 2 =
BS + K 1
(M S
2
1
G1G 3 =
(M S
1
BS + K 1
+ BS + K 1 ) ( M 2 S + BS + K 1 + K 2 )
BS + K 1
2
.
.
2
1
+ BS + K 1 ) ( M 2 S + BS + K 1 + K 2 )
2
Com isto, a função de transferência deste sistema é dada por:
BS + K 1
( M 1S + BS + K 1 ).( M 2S 2 + BS + K 1 + K 2 )
X 1 (s)
=
F( s)
( M 1S 2 + BS + K 1 )( M 2 S2 + BS + K1 + K 2 ) − ( BS + K1 ) 2
2
(M S
1
2
+ BS + K 1 )( M 2S 2 + BS + K 1 + K 2 )
X1 (s)
BS + K 1
=
4
3
F(s)
M 1 M 2 S + (M 1 + M 2 )BS + (M 1 K 1 + M 1 K 2 + M 2 K 1 )S 2 + BK 2S + K 1 + K 2
Esta função de transferência, descreve completamente, a dinâmica do sistema apresentado.
Uma vez conhecido, a massa do carro “M1”, massa da roda “M2” e a elasticidade do pneu “K2”, a
suavidade ou conforto do carro é determinado pela definição dos valores de K1 e B.(B → amortecedor; K1 → mola).
Como o coeficiente de amortecimento B varia com o desgaste do amortecedor, a função de
transferência também varia com o tempo mudando o conforto do carro.
4.2.2- SISTEMAS MECÂNICOS DE ROTAÇÃO
Os elementos mecânicos envolvidos nos sistemas mecânicos de rotação, são os mesmos já
definidos para os sistemas mecânicos de translação. A diferença é que agora os deslocamentos são
angulares.
Prof. Hélio Leães Hey - 1997
Projeto Reenge - Eng. Elétrica
Apostila de Sistemas de Controle I
IV-7
- Elementos de inércia (Momento de Inércia)
T( t ) = J α( t ) = J
dω( t )
d 2 θ( t )
=J
∴ T(t) = Jθ( t )
dt
dt 2
Onde:
J → Momento de inércia;
T(t) → Torque aplicado;
θ(t) → Deslocamento angular.
α(t) → Aceleração angular;
ω(t) → Velocidade angular.
- Elemento de Amortecimento (Amortecedor)
(
T(t ) = B θ 1 ( t ) − θ 2 ( t )
)
θ 1 ( t ) − θ 2 ( t ) = Velocidade Relativa;
T = Torque aplicado;
B = Coef. de amortecimento Rotacional.
- Elemento de Elasticidade (Mola)
T(t ) = K(θ 1 ( t ) − θ 2 ( t ))
T (t) = Torque aplicado;
θ1(t) - θ2(t) = Desloc. angular relativo.
Exemplos:
1) Considere o sistema mecânico rotacional, mostrado a seguir:
Jα( t ) = ∑ T( t )
Jω ( t ) = T(t ) − Bω ( t )
T(t ) = Jω ( t ) + Bω ( t )
Aplicando T.L, resulta: T(s) = JS.Ω(s) +B.Ω(s)
1
Ω(s)
=
T(s) J .S + B
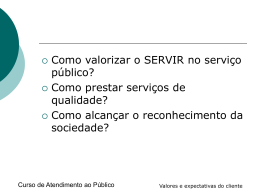
2) Considere o sistema mecânico rotacional, mostrado a seguir:
Este sistema é um exemplo de relógios de pêndulo. O momento
de Inércia do pêndulo, é representado por J; a fricção entre o
pêndulo e o ar é representado por B, e a elasticidade do pêndulo é representada por K.
Jα( t ) = ∑ T( t )
J
Prof. Hélio Leães Hey - 1997
d 2 θ( t )
dθ ( t )
= T(t ) − B
− Kθ( t )
2
dt
dt
Projeto Reenge - Eng. Elétrica
Apostila de Sistemas de Controle I
IV-8
Aplicando T.L, resulta:
J . S 2 θ(s) = T(s) − BS. θ(s) − K. θ(s)
A função de transferência, será então:
θ(s)
1
=
2
T(s) J.S + B.S + K
4.3- MODELAGEM MATEMÁTICA DE SISTEMAS ELÉTRICOS
A modelagem de sistemas elétricos é baseada nas leis das tensões e das correntes de Kirchoff.
Devido a nossa familiaridade com circuitos elétricos, a modelagem dos mesmos torna-se facilitada.
Os elementos envolvidos nos circuitos elétricos são: Resistores, Indutores, Capacitores, amplificadores, etc...
4.3.1- CIRCUITO RLC
di( t )
+ Ri( t ) + ϑc( t ) = ei( t )
dt
dϑc( t )
i( t ) = C
dt
L
Aplicando a T.L nas expressões acima, resulta:
L.S.I(s) + R.I(s) + Vc(s) = Ei(s)
I(s) = C.S.Vc(s)
Substituindo-se a expressão de I(s) na primeira equação, tem-se:
L.S.C.S.Vc(s) + R.C.S.Vc(s) + Vc(s) = Ei(s)
Como:
Vc(s) = E0(s)
LCS2. E0(s) + R.CSE0(s) + E0(s) =Ei(s)
E 0 (s)
1
=
2
Ei(s) L. C. S + R. C.S + 1
Obs:
Em invés trabalharmos com o elemento elétrico podemos trabalhar com o circuito de impedância complexa, facilitando a obtenção da Função de Transferência.
ELEMENTO
R
L
C
Prof. Hélio Leães Hey - 1997
IMPEDÂNCIA CARACTERÍSTICA
R
LS
1/CS
Projeto Reenge - Eng. Elétrica
Apostila de Sistemas de Controle I
IV-9
2)
E 0 (s) =
Ei (s) + R 1 I 1 (s) +
1
(I 1 (s) − I 2 (s)) = 0
C 1S
1
(I 1 (s) − I 2 (s)) + R 2 I 2 (s) + E 0 (s) = 0
C 1S
I 1 (s) =
1
. I 2 (s)
C2S
I 1 (s) − I 2 (s)
= Ei(s) − R 1 I 1 (s)
C 1S
I 1 (s) − I 2 (s)
= E 0 (s) + R 2 I 2 (s)
C 1S
C 1SEi(s) + C 2 SE 0 (s)
1 + R 1 C1S
I 2 (s) = C 2 SE 0 (s)
C SEi (s) + C 2 SE 0 (s)
Ei (s) − R 1 . 1
= E 0 (s) + R 2 C 2 SE 0 (s)
1 + R 1C 1S
Ei (s)(1 + R 1C 1S − R 1C 1S) + R 1C 2 SE 0 (s) = (1 + R 1C 1S)(1 + R 2 C 2 S)E 0 (s)
E0
1
=
Ei (1 + R 1C 1S)(1 + R 2 C 2 S) + R 1C 2 S
4.4- SISTEMAS ANÁLOGOS
Sistemas análogos, são sistemas que embora apresentem características físicas diferentes, são
descritos pelos mesmos modelos matemáticos. A existência deste conceito é muito utilizada na prática. Uma vez que um determinado sistema físico esteja estudado e analisado, um outro sistema análogo a este também estará. Em virtude da construção de um protótipo de um sistema mecânico, hidráulico, etc, ser mais complicado, estes sistemas podem se estudados e analisados através do circuito elétrico análogo.
4.4.1- ANALOGIA ENTRE SISTEMAS ELÉTRICOS E MECÂNICOS
Entre os sistemas elétricos e mecânicos, existem dois tipos de analogias:
• Analogia Força-Tensão;
• Analogia Força-Corrente.
a) Analogia Força-Tensão
Abaixo é mostrado as grandezas análogas entre os sistemas Elétricos e Mecânicos para este
caso.
Prof. Hélio Leães Hey - 1997
Projeto Reenge - Eng. Elétrica
Apostila de Sistemas de Controle I
SISTEMA ELÉTRICO
Tensão ϑ(t)
Indutância L
Resistência R
Inverso da Capacitância 1/C
Carga Elétrica q(t)
Corrente i(t)
IV-10
SISTEMA MECÂNICO DE
TRANSLAÇÃO
Força F(t)
Massa M
Coef. de Atrito B
Coef. de Elasticidade K
Deslocamento χ ( t )
Velocidade χ ( t )
SISTEMA MECÂNICO DE
ROTAÇÃO
Torque T(t)
Momento de Inércia (J)
Coef. de Atrito B
Coef. de Elasticidade K
Desloc. Angular θ(t)
Veloc. Angular θ ( t ) = ω( t )
Sejam os sistemas elétricos e mecânicos, abaixo representados.
Para o sistema mecânico, tem-se que:
d 2 χ( t )
dχ( t )
+B
+ K χ( t ) = f
M
dt
dt
“1”
Para o sistema elétrico, tem-se que:
1
di( t )
+ Ri( t ) + ∫ i( t )dt = ϑ( t )
L
C
dt
dq 2 ( t )
dq ( t ) 1
dq ( t )
+R
+ q(t ) = ϑ(t )
→ L
mas, i( t ) =
2
C
dt
dt
dt
“2”
onde: q(t) → Cargas elétricas.
As equações diferenciais “1” e “2” são idênticas e portanto os dois sistemas apresentados
são análogos.
b) Analogia Força-Corrente
Sejam os sistemas elétricos e mecânicos, abaixo representados.
Prof. Hélio Leães Hey - 1997
Projeto Reenge - Eng. Elétrica
Apostila de Sistemas de Controle I
IV-11
A equação que define o sistema mecânico já foi obtida acima, em “1”.
Para o sistema elétrico, tem-se que:
iL(t) + iR(t) + iC(t) = is(t)
“3”
ϑ( t )
1
dϑ( t )
ϑ ( t ) dt +
+C
= is( t )
∫
L
R
dt
mas: ϑ ( t ) =
dφ ( t )
;
dt
C
onde: φ → fluxo magnético.
dφ 2 ( t ) 1 dφ( t ) 1
+
+ φ( t ) = is( t )
R dt
L
dt 2
“4”
As equações “1” e “4”, são idênticas e portanto os dois sistemas apresentados são análogos.
Abaixo é mostrado as grandezas análogas entre os sistemas elétricos e mecânicos para o caso
da analogia Força-Corrente.
SISTEMA ELÉTRICO
Corrente i(t)
Capacitância C
Inverso da Resistência 1/R
Inverso da Indutância 1/L
Fluxo Magnético φ(t)
SISTEMA MECÂNICO DE
TRANSLAÇÃO
Força F(t)
Massa M
Coef. de Atrito B
Coef. de Elasticidade K
Deslocamento χ ( t )
SISTEMA MECÂNICO DE
ROTAÇÃO
Torque T(t)
Momento de Inércia (J)
Coef. de Atrito B
Coef. de Elasticidade K
Desloc. Angular θ(t)
4.5 - SISTEMAS ELETROMECÂNICOS
Os sistemas eletromecânicos a serem analisados são o servomotor de corrente contínua e o
gerador de corrente contínua.
4.5.1- SERVOMOTORES DE CORRENTE CONTÍNUA
Um servomotor de corrente contínua é um motor de corrente contínua, com características
dinâmicas especiais, para serem usados em sistemas realimentados.
As características desejáveis de um servomotor de CC são:
•
•
•
•
Inércia reduzida;
Máxima aceleração possível;
Alta relação torque-inércia;
Constante de tempo extremamente pequena.
Os servomotores CC de baixas potências são usados em equipamentos computacionais como
acionadores de disco, impressoras, acionadores de fita e também em instrumentação. Já os servomotores CC de médias e altas potências são usados em sistemas robotizados, controles de posição,
etc...
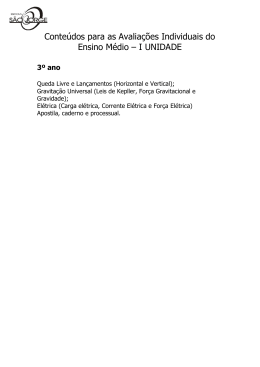
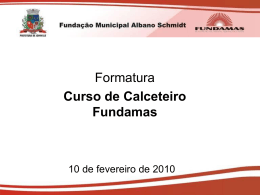
O modelo básico de um servomotor CC, é mostrado a seguir:
Prof. Hélio Leães Hey - 1997
Projeto Reenge - Eng. Elétrica
Apostila de Sistemas de Controle I
IV-12
ϑa(t) → Tensão aplicada na armadura;
Ra → Resistência de armadura;
La → Indutância de armadura;
Ea(t) → Força eletromotriz
ia(t)→ Corrente da armadura;
Lf → Indutância de campo;
Rf → Resistência de campo;
ϑf(t) → Tensão aplicada no campo;
if(t) → Corrente de campo;
T(t) → Torque desenvolvido pelo motor;
Lf, Rf → Enrolamento de campo;
Ra, La → Enrolamento de armadura.
Este servomotor pode ser acionado de 2 formas, que são:
• Controle da Armadura;
• Controle de Campo;
No CONTROLE DE ARMADURA, o enrolamento de campo é excitado separadamente. A corrente de campo é mantida constante e o controle do motor é exercido pela corrente de armadura.
No CONTROLE DE CAMPO, a corrente de armadura é mantida constante e a velocidade é controlada pela tensão de campo. O controle pelo campo dos servomotores, apresenta como desvantagens, o fato de trabalhar com constantes de tempo maiores e também a maior dificuldade de obtenção de uma fonte de corrente contínua.
4.5.1.1- CONTROLE PELA ARMADURA DE SERVOMOTORES CC
Considere o diagrama esquemático do controle de servomotores CC pela armadura. A corrente de campo é mantida constante.
As equações que definem o motor CC em Regime Permanente estão abaixo definidas.
O torque eletromagnético desenvolvido pelo motor CC é dado pela seguinte expressão:
T(t) = Ka.φ(t).ia(t)
Prof. Hélio Leães Hey - 1997
“1”
Onde:
φ → Fluxo no entreferro;
Ka → CTE;
ia(t) → Corrente de armadura.
Projeto Reenge - Eng. Elétrica
Apostila de Sistemas de Controle I
IV-13
Pela curva de magnetização mostrada, o fluxo no entreferro na região linear, é proporcional a
corrente de campo.
φ(t) = Kf . if (t)
“2”
Como neste caso a corrente de campo é constante, resulta que o fluxo também será:
φ(t) = K1
“3”
T(t) = K2 . ia(t)
“4”
Substituindo “3” em “1”, tem-se:
Pela expressão “4”, o torque eletromagnético produzido pelo motor CC é diretamente proporcional a corrente de armadura.
A força eletromotriz “Ea(t)” induzida na armadura é dada por:
“5”
Ea(t) = Ka.φ (t).ωm(t)
Onde:
ωm(t) → Velocidade angular do motor;
Como o fluxo é constante, resulta:
E a ( t ) = K 3 .ωm ( t )
“6”
ou
E a (t) = K 3 .
dθ(t)
dt
A equação diferencial associada a armadura do motor CC, isto é, a equação do motor CC é
definida em “7”.
d. i a (t)
“7”
ϑ a (t) = L a
+ R a . i a (t) + E a ( t )
dt
A equação diferencial mecânica associada ao sistema representado na figura, é definido em
“8”.
T(t ) = J
dθ 2 ( t )
dθ( t )
+B
dt
dt
“8”
Assumindo condições iniciais nulas, a transformada de Laplace das expressões “6”, “7”, “8”
e “4”, será:
“9”
Ea(s) = K3.S.θ(s)
Va(s) = La.S.Ia(s) +Ra.Ia(s) +Ea(s)
T(s) = J.S2.θ(s) + B.S.θ(s)
T(s) = K2.Ia(s)
“10”
“11”
“12”
Considerando que a tensão aplicada na armadura da máquina “Va(s)” é a entrada do sistema,
o deslocamento angular do eixo do rotor “θ(s)” é a saída, pode-se então obter a Função de Transferência deste sistema.
Prof. Hélio Leães Hey - 1997
Projeto Reenge - Eng. Elétrica
Apostila de Sistemas de Controle I
IV-14
Inicialmente, mostra-se o diagrama de blocos para o sistema apresentado.
O diagrama de fluxo de sinais, é mostrado a seguir:
K2
θ(s)
=
Va (s)
( L . S + R )( J . S
+ B. S)
K 2 . K 3 .S
a
1+
2
a
( L . S + R )( J . S
a
2
a
+ B. S)
∴
K2
θ(s)
=
Va (s) ( L a .S + R a ). S.( J .S + B) + K 2 . K 3 .S
K2
θ(s)
=
Va (s) S K 2 . K 3 + ( L a . S + R a )( J . S + B)
{
K2
θ(s)
=
2
Va (s) S L a . J . S + ( L a . B + R a . J )S + R a . B + K 2 . K 3
(
“13”
}
)
“14”
Considerando-se que La é pequena e pode ser desprezada, temos:
K2
θ(s)
=
Va (s) S( R a . J . S + R a . B + K 2 . K 3 )
“15”
Ou:
K2
R a B + K2 . K 3
Km
θ(s)
θ(s)
=
=
⇒
Va (s)
Ra .J
S. ( Tm . S + 1) Va (s)
S
S + 1
R a . B + K 2 . K3
Tm =
R a .J
R a . B + K2 .K3
Km =
K2
R a . B + K 2 . K3
“16”
Km = ganho constante da máquina;
Tm = constante de tempo da máquina.
Pelas expressões acima observa-se que quanto menor for “Ra” e “J”, menor será a constante
de tempo da máquina.
Prof. Hélio Leães Hey - 1997
Projeto Reenge - Eng. Elétrica
Apostila de Sistemas de Controle I
IV-15
As expressões “15” e “16” representam a Função de Transferência para o sistema eletromecânico mostrado. Para obtermos a representação por espaço de estado, basta que se tenha as equações diferenciais relacionadas as expressões “15” e “16”.
Da expressão “15”, resulta:
R a . J .θ( t ) + ( R a . B + K 2 . K 3 )θ ( t ) = K 2 .ϑ a ( t )
“17”
Sejam χ 1( t ) e χ 2 ( t ) as variáveis de estado.
χ 1 ( t) = θ(t )
χ 2 ( t ) = θ ( t )
A saída θ(t) será: y(t) = θ(t) = χ 1(t) e a entrada: ϑa(t) = µ(t)
χ 1 ( t ) = χ 2 ( t )
χ 2 ( t ) = −
(R
a
. B + K2 .K3 )
R a .J
.χ 2 +
K2
ϑ (t )
R a .J a
A representação por Espaço de Estado para a equação “17” resulta:
χ ( t) 0
1
χ 1 ( t ) 0
1
.
.
+
R
B
K
K
2
3 .
χ ( t ) = 0 − a
+ K 2 . µ( t )
χ
2
2 ( t)
R a .J
R a . J
“18”
χ 1( t )
y( t ) = [1 0].
χ 2 ( t)
Em função dos termos “Km” e “Tm”, já definidos, a representação por espaço de estado,
resulta:
1 χ 1 ( t) 0
χ 1 ( t ) 0
χ ( t ) = 0 − 1 . χ ( t ) + K m . µ( t )
2
Tm 2 Tm
χ 1( t )
y( t ) = [1 0].
χ 2( t )
O uso do controle eletrônico de servomotores CC, também conhecido como servo acionamento, melhora significamente a operação dos servomotores. A seguir é mostrado um diagrama de
blocos de um servoacionamento para controle de velocidade de um servomotor CC.
Prof. Hélio Leães Hey - 1997
Projeto Reenge - Eng. Elétrica
Apostila de Sistemas de Controle I
IV-16
Ei → referência de velocidade (volts);
E0 → velocidade de saída (volts);
TN → sensor de velocidade.
O diagrama acima, representa o controle de velocidade de um servomotor CC. O servoacionamento, transforma o erro entre a Velocidade de Referência e a Velocidade medida, num aumento
ou diminuição da tensão que alimenta a armadura do servomotor.
A seguir é mostrado, um diagrama simplificado, para o controle de posição de um servomoKa
1
tor. O bloco
, representa o ganho do servoacionamento Ka e o integrador .
S
S
Atualmente, através do uso de servoacionamentos incorpora-se ao sistema (servoacionamento + servomotor) duas malhas de controle de velocidade e posição, conforme mostrado abaixo.
4.5.1.2- GERADOR CC
O modelo básico do gerador CC, é mostrado a seguir:
As equações que regem este sistema são:
Equação de campo:
ϑ f ( t) = R f i f (t) + L f
Equação de Armadura: E a ( t ) = R a i a ( t ) + La
Prof. Hélio Leães Hey - 1997
d
i f ( t)
dt
“19”
d
i a (t) + ϑ a ( t)
dt
“20”
Equaçã
Projeto Reenge - Eng. Elétrica
Apostila de Sistemas de Controle I
o de carga:
IV-17
ϑ a ( t ) = Z. i a ( t )
“21”
E a ( t ) = K a . φ.
Pela equação “5” temos que:
dθ( t )
dt
Considerando-se que a velocidade do gerador é constante, e que pela equação “2” o fluxo no
entreferro é diretamente proporcional a corrente de campo if(t), resulta:
E a (t ) = K 4 . i f ( t)
“22”
Desta forma, as transformadas de Laplace das equações “19”, “20”, “21” e “22”, são dadas
por:
Vf (s) = ( R f + L f .S). I f (s)
“23”
E a (s) = K 4 . i f (s)
“24”
I a (s) =
1
E a (s)
R a + Z + L a .S
Va (s) = Z. I a (s)
“25”
“26”
O diagrama de bloco para o sistema é mostrado abaixo:
A função de transferência entre Va(s) e Vf(s) é dada por:
Va (s)
K4 . Z
=
Vf (s) ( L f . S + R f )( L a . S + R a + Z)
“27”
Pela expressão acima, verifica-se que a carga “Z” afeta tanto a dinâmica do gerador como
também a própria saída ϑa(t).
4.6- TRANSFORMADORES E ENGRENAGENS
Em um circuito elétrico, um transformador é um dispositivo de acoplamento magnético, cuja
finalidade é transformar os níveis de tensão e corrente de um lado do acoplamento para o outro. Em
nosso estudo todos os transformadores serão considerados ideais, sendo desta forma, a potência de
entrada do mesmo igual a sua potência de saída. A seguir é mostrado o modelo de um transformador
ideal.
P1 ( t ) = e 1 ( t ). i 1 ( t )
P2 ( t ) = e 2 ( t ). i 2 ( t )
P1 ( t ) = P2 ( t )
e1 ( t) i 2 ( t)
=
e 2 ( t) i1 (t )
Prof. Hélio Leães Hey - 1997
Projeto Reenge - Eng. Elétrica
Apostila de Sistemas de Controle I
IV-18
Pela Lei de Faraday sabe-se que a tensão induzida em um bobina é diretamente proporcional
a taxa de variação do fluxo magnético e ao número de espiras da bobina. Com isto, tem-se que:
e1 ( t ) = N 1
dφ( t )
dt
e 2 ( t) = N 2
e
dφ( t )
dt
Portanto:
e1 ( t )
N1
=
e2 (t )
N2
N 1 e1 ( t) i 2 ( t)
=
=
N 2 e 2 ( t) i1 ( t)
e
A função da engrenagem em um sistema mecânico é a mesma, do transformador em um sistema elétrico, isto é, propiciar o acoplamento mecânico. Seja o acoplamento mecânico mostrado a
seguir:
Onde:
T1(t), T2(t) → Torques;
θ1(t), θ2(t) → Deslocamentos angulares;
N1, N2
→ Número de dentes das engrenagens.
Em uma outra perspectiva, o sistema de engrenagens pode ser representado como mostrado
abaixo. O produto entre o número de dente de uma engrenagem (N1) e o deslocamento angular desta
engrenagem (θ1), deve ser igual ao mesmo produto relativo a outra engrenagem. Portanto:
N 1 .θ1 ( t) = N 2 .θ 2 ( t)
ou
N 1 θ 2 ( t)
=
N 2 θ1 ( t )
Já os torques T1(t) e T2(t) são diretamente proporcionais aos números de dentes das engrenagens. Portanto:
N 1 T1 ( t )
=
N 2 T2 ( t )
Por outro lado, o número de dentes de uma engrenagem é diretamente proporcional ao raio
N
R
(ou diâmetro) da engrenagem, isto é, 1 = 1 = n a .
N2 R2
4.7- LINEARIZAÇÃO DE MODELOS MATEMÁTICOS NÃO-LINEARES
Conforme já foi comentado anteriormente, os modelos mais precisos de sistemas físicos são
não-lineares. Entretanto, a transformação de Laplace não pode ser utilizada na solução de equações
diferenciais não-lineares. Por isto, é necessário que seja introduzida uma técnica de linearização de
sistemas não-lineares.
Prof. Hélio Leães Hey - 1997
Projeto Reenge - Eng. Elétrica
Apostila de Sistemas de Controle I
IV-19
Seja o sistema de um pêndulo mostrado abaixo:
L → comprimento do pêndulo;
M → massa do pêndulo;
f → força que atua no pêndulo;
g → gravidade.
A equação diferencial que descreve o movimento do pêndulo, é:
L d 2 θ( t )
= − sen θ( t )
.
g dt 2
Esta equação é não linear, devido a presença do termo sen θ(t). A característica não-linear
para a função f(θ) = sen θ é mostrada abaixo.
O procedimento usual de linearização é substituir a característica da função por uma linha
reta, o que fornece uma precisão razoável para uma pequena região de operação. Por exemplo, suponha que deseja-se linearizar a função f(θ) = sen θ em torno do ponto f(θ0). Através de expansão
em Série de Taylor, representa-se a função f(θ) em torno do ponto “θ0”, por:
f (θ) = f (θ 0 ) +
df
dθ
( θ= θ0 )
.(θ − θ0 ) +
d2f
dθ2
( θ= θ0 )
.
(θ − θ0 ) 2
+......
2!
“2”
Se a variação “θ - θ0” é pequena, os termos de maior grau podem ser desprezados na série de
Taylor. Isto resulta em:
f (θ ) ≅ f (θ 0 ) +
df
dθ
( θ =θ 0 )
. (θ − θ 0 )
“3”
Seja portanto: f(θ) = sen θ. Com isto temos:
sen θ = sen θ0 + {cosθ0 }.( θ − θ0 )
“4”
0
Como, o pêndulo mostrado, opera na região em que θ = 0 , pode-se linearizar a função em torno do ponto θ0 = 0 0 .
sen θ ≅ 0 + 1. ( θ − 0 0 ) ∴ senθ ≅ θ
Prof. Hélio Leães Hey - 1997
“5”
Projeto Reenge - Eng. Elétrica
Apostila de Sistemas de Controle I
IV-20
Substituindo “5” em “1”, resulta:
L d 2 θ( t )
= −θ( t )
.
g dt 2
“6”
ou
θ
( t )
+
g
θ( t ) = 0
L
“7”
Portanto, para linearizar uma função f (χ ) em torno do ponto “ χ 0 ”, deve-se⇒ expandir esta
função através de Série de Taylor, considerando-se desprezível os termos (θ − θ0)n, ⇒para n > 1.
f (χ ) = f (χ 0 ) +
df ( χ)
dχ
χ=χ0
(χ − χ 0 )
A precisão, desta linearização depende da magnitude dos termos ignorados.
Prof. Hélio Leães Hey - 1997
Download