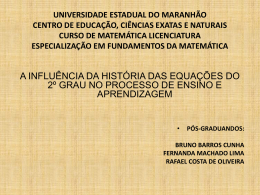
SISTEMAS VEICULARES por Hilbeth Azikri, Dr.1 1 [email protected] www.pessoal.utfpr.edu.br/azikri Núcleo de Mecânica Aplicada e Teórica - NuMAT www.numat.ct.utfpr.edu.br [email protected] Curso de Especialização em Engenharia Automotiva EMENTA Formalismo da dinâmica de múltiplos corpos: propriedades de inécia, equações de Newton-Lagrange, princípios de D’Alambert e de Jordan, considerações energéticas e equações de Euler-Lagrange; Modelos para sistemas de suporte/guia: modelos de suspensão passiva e ativa, modelos de força de contato pneu-rodovia; Modelos de rodovia: modelos elásticos (determinísticos) e rígidos (estocásticos); Modelos para o sistema veículo-rodovia; Critérios de avaliação. EMENTA Formalismo da dinâmica de múltiplos corpos: propriedades de inécia, equações de Newton-Lagrange, princípios de D’Alambert e de Jordan, considerações energéticas e equações de Euler-Lagrange; Modelos para sistemas de suporte/guia: modelos de suspensão passiva e ativa, modelos de força de contato pneu-rodovia; Modelos de rodovia: modelos elásticos (determinísticos) e rígidos (estocásticos); Modelos para o sistema veículo-rodovia; Critérios de avaliação. EMENTA Formalismo da dinâmica de múltiplos corpos: propriedades de inécia, equações de Newton-Lagrange, princípios de D’Alambert e de Jordan, considerações energéticas e equações de Euler-Lagrange; Modelos para sistemas de suporte/guia: modelos de suspensão passiva e ativa, modelos de força de contato pneu-rodovia; Modelos de rodovia: modelos elásticos (determinísticos) e rígidos (estocásticos); Modelos para o sistema veículo-rodovia; Critérios de avaliação. EMENTA Formalismo da dinâmica de múltiplos corpos: propriedades de inécia, equações de Newton-Lagrange, princípios de D’Alambert e de Jordan, considerações energéticas e equações de Euler-Lagrange; Modelos para sistemas de suporte/guia: modelos de suspensão passiva e ativa, modelos de força de contato pneu-rodovia; Modelos de rodovia: modelos elásticos (determinísticos) e rígidos (estocásticos); Modelos para o sistema veículo-rodovia; Critérios de avaliação. EMENTA Formalismo da dinâmica de múltiplos corpos: propriedades de inécia, equações de Newton-Lagrange, princípios de D’Alambert e de Jordan, considerações energéticas e equações de Euler-Lagrange; Modelos para sistemas de suporte/guia: modelos de suspensão passiva e ativa, modelos de força de contato pneu-rodovia; Modelos de rodovia: modelos elásticos (determinísticos) e rígidos (estocásticos); Modelos para o sistema veículo-rodovia; Critérios de avaliação. EMENTA Formalismo da dinâmica de múltiplos corpos: propriedades de inécia, equações de Newton-Lagrange, princípios de D’Alambert e de Jordan, considerações energéticas e equações de Euler-Lagrange; Modelos para sistemas de suporte/guia: modelos de suspensão passiva e ativa, modelos de força de contato pneu-rodovia; Modelos de rodovia: modelos elásticos (determinísticos) e rígidos (estocásticos); Modelos para o sistema veículo-rodovia; Critérios de avaliação. OBJETIVO Geral: O objetivo deste curso é abordar o problema dinâmico do sistema veículorodovia sob a ótica da dinâmica de múltiplos corpos. Abordando os principais modelos adotados para restrições de contato, dissipação e rodovias. Específicos: Compreensão dos modelos matemáticos de veículos, de orientação/sistemas de suspesão e rodovias, e como se dá esta interação destes objetivando a descrição do sistema veículo-rodovia. INTRODUÇÃO Fig. 1: Sistemas veiculares terrestres. INTRODUÇÃO Fig. 2: Abordagens empírica e axiomática. INTRODUÇÃO Modelos Físicos Sistemas multi-corpos; Método de elementos finitos; Sistemas contínuos. Tipos de Forças Internas e externas; Aplicadas e restrição; Corpo e superfície. INTRODUÇÃO Modelos Físicos Sistemas multi-corpos; Método de elementos finitos; Sistemas contínuos. Tipos de Forças Internas e externas; Aplicadas e restrição; Corpo e superfície. INTRODUÇÃO Modelos Físicos Sistemas multi-corpos; Método de elementos finitos; Sistemas contínuos. Tipos de Forças Internas e externas; Aplicadas e restrição; Corpo e superfície. INTRODUÇÃO Modelos Físicos Sistemas multi-corpos; Método de elementos finitos; Sistemas contínuos. Tipos de Forças Internas e externas; Aplicadas e restrição; Corpo e superfície. INTRODUÇÃO Modelos Físicos Sistemas multi-corpos; Método de elementos finitos; Sistemas contínuos. Tipos de Forças Internas e externas; Aplicadas e restrição; Corpo e superfície. INTRODUÇÃO Modelos Físicos Sistemas multi-corpos; Método de elementos finitos; Sistemas contínuos. Tipos de Forças Internas e externas; Aplicadas e restrição; Corpo e superfície. INTRODUÇÃO Modelos Físicos Sistemas multi-corpos; Método de elementos finitos; Sistemas contínuos. Tipos de Forças Internas e externas; Aplicadas e restrição; Corpo e superfície. INTRODUÇÃO FORMALISMO DA DINÂMICA DE CORPOS MÚLTIPLOS Fig. 4: Elementos: Corpo rígido, acoplamento e conectivos. FORMALISMO DA DINÂMICA DE CORPOS MÚLTIPLOS Propriedades de inércia: FORMALISMO DA DINÂMICA DE CORPOS MÚLTIPLOS Exercício FORMALISMO DA DINÂMICA DE CORPOS MÚLTIPLOS Elementos de cinética: FORMALISMO DA DINÂMICA DE CORPOS MÚLTIPLOS Elementos de cinética: FORMALISMO DA DINÂMICA DE CORPOS MÚLTIPLOS Elementos de cinética: FORMALISMO DA DINÂMICA DE CORPOS MÚLTIPLOS Elementos de cinética: FORMALISMO DA DINÂMICA DE CORPOS MÚLTIPLOS Elementos de cinética: FORMALISMO DA DINÂMICA DE CORPOS MÚLTIPLOS Elementos de cinética: FORMALISMO DA DINÂMICA DE CORPOS MÚLTIPLOS Exercício Um carro em trajetória circular de raio R e a uma altura h, possue uma velocidade cte. vF . Em um determinado momento um passageiro joga uma garrafa (partícula K ) a uma velocidade relativa vK sob um ângulo ϕ. Neste sentido, determine vK e ϕ para que a garrafa atinja o centro da trejetória do carro quando cair no chão, e qual a trajetória da garrafa vista pelo passageiro do carro. FORMALISMO DA DINÂMICA DE CORPOS MÚLTIPLOS Equações de Newton-Lagrange: FORMALISMO DA DINÂMICA DE CORPOS MÚLTIPLOS Equações de Newton-Lagrange: FORMALISMO DA DINÂMICA DE CORPOS MÚLTIPLOS Princípio de D’Alambert: FORMALISMO DA DINÂMICA DE CORPOS MÚLTIPLOS Princípio de D’Alambert: FORMALISMO DA DINÂMICA DE CORPOS MÚLTIPLOS Princípio de Jordan: FORMALISMO DA DINÂMICA DE CORPOS MÚLTIPLO Considerações energéticas e equações de Euler-Lagrange: FORMALISMO DA DINÂMICA DE CORPOS MÚLTIPLO Considerações energéticas e equações de Euler-Lagrange: FORMALISMO DA DINÂMICA DE CORPOS MÚLTIPLO Exercício FORMALISMO DA DINÂMICA DE CORPOS MÚLTIPLO FORMALISMO DA DINÂMICA DE CORPOS MÚLTIPLO FORMALISMO DA DINÂMICA DE CORPOS MÚLTIPLO Exercício FORMALISMO DA DINÂMICA DE CORPOS MÚLTIPLO FORMALISMO DA DINÂMICA DE CORPOS MÚLTIPLO FORMALISMO DA DINÂMICA DE CORPOS MÚLTIPLO FORMALISMO DA DINÂMICA DE CORPOS MÚLTIPLO FORMALISMO DA DINÂMICA DE CORPOS MÚLTIPLO Especificação do sistema/Dados de entrada; Considerções elementares/Equações locais; Relações entre as equações locais e globais; Considerações do sistema e equações globais; Cálculo das forças e torques resultantes. FORMALISMO DA DINÂMICA DE CORPOS MÚLTIPLO Especificação do sistema/Dados de entrada; Considerções elementares/Equações locais; Relações entre as equações locais e globais; Considerações do sistema e equações globais; Cálculo das forças e torques resultantes. FORMALISMO DA DINÂMICA DE CORPOS MÚLTIPLO Especificação do sistema/Dados de entrada; Considerções elementares/Equações locais; Relações entre as equações locais e globais; Considerações do sistema e equações globais; Cálculo das forças e torques resultantes. FORMALISMO DA DINÂMICA DE CORPOS MÚLTIPLO Especificação do sistema/Dados de entrada; Considerções elementares/Equações locais; Relações entre as equações locais e globais; Considerações do sistema e equações globais; Cálculo das forças e torques resultantes. FORMALISMO DA DINÂMICA DE CORPOS MÚLTIPLO Especificação do sistema/Dados de entrada; Considerções elementares/Equações locais; Relações entre as equações locais e globais; Considerações do sistema e equações globais; Cálculo das forças e torques resultantes. FORMALISMO DA DINÂMICA DE CORPOS MÚLTIPLO Especificação do sistema/Dados de entrada; Considerções elementares/Equações locais; Relações entre as equações locais e globais; Considerações do sistema e equações globais; Cálculo das forças e torques resultantes. MODELOS PARA SISTEMAS DE SUPORTE/GUIA Geral: Sustententar o veículo sobre a rodovia e permitir a sua guiabilidade ao longo da mesma; Isolamento do corpo do veículo incluindo passageiros e carga(s) de disturbios causados por oscilações no perfil da rodovia e carregamentos externos (vento, etc.). MODELOS PARA SISTEMAS DE SUPORTE/GUIA Geral: Sustententar o veículo sobre a rodovia e permitir a sua guiabilidade ao longo da mesma; Isolamento do corpo do veículo incluindo passageiros e carga(s) de disturbios causados por oscilações no perfil da rodovia e carregamentos externos (vento, etc.). MODELOS PARA SISTEMAS DE SUPORTE/GUIA Geral: Sustententar o veículo sobre a rodovia e permitir a sua guiabilidade ao longo da mesma; Isolamento do corpo do veículo incluindo passageiros e carga(s) de disturbios causados por oscilações no perfil da rodovia e carregamentos externos (vento, etc.). MODELOS PARA SISTEMAS DE SUPORTE/GUIA MODELOS PARA SISTEMAS DE SUPORTE/GUIA MODELOS PARA SISTEMAS DE SUPORTE/GUIA Exercício MODELOS PARA SISTEMAS DE SUPORTE/GUIA Elementos Passivos Não há fonte de energia externa; Manufatura mais barata, projeto mais simples, mais robusto e menor custo de manutenção; Os esforços envolvidos dependem do movimento relativo entre os elementos e os corpos relacionados; Necessidade de conexões suaves entre os corpos contíguos por razões de conforto; As molas secundárias sofrem grande deformações elásticas. MODELOS PARA SISTEMAS DE SUPORTE/GUIA Elementos Passivos Não há fonte de energia externa; Manufatura mais barata, projeto mais simples, mais robusto e menor custo de manutenção; Os esforços envolvidos dependem do movimento relativo entre os elementos e os corpos relacionados; Necessidade de conexões suaves entre os corpos contíguos por razões de conforto; As molas secundárias sofrem grande deformações elásticas. MODELOS PARA SISTEMAS DE SUPORTE/GUIA Elementos Passivos Não há fonte de energia externa; Manufatura mais barata, projeto mais simples, mais robusto e menor custo de manutenção; Os esforços envolvidos dependem do movimento relativo entre os elementos e os corpos relacionados; Necessidade de conexões suaves entre os corpos contíguos por razões de conforto; As molas secundárias sofrem grande deformações elásticas. MODELOS PARA SISTEMAS DE SUPORTE/GUIA Elementos Passivos Não há fonte de energia externa; Manufatura mais barata, projeto mais simples, mais robusto e menor custo de manutenção; Os esforços envolvidos dependem do movimento relativo entre os elementos e os corpos relacionados; Necessidade de conexões suaves entre os corpos contíguos por razões de conforto; As molas secundárias sofrem grande deformações elásticas. MODELOS PARA SISTEMAS DE SUPORTE/GUIA Elementos Passivos Não há fonte de energia externa; Manufatura mais barata, projeto mais simples, mais robusto e menor custo de manutenção; Os esforços envolvidos dependem do movimento relativo entre os elementos e os corpos relacionados; Necessidade de conexões suaves entre os corpos contíguos por razões de conforto; As molas secundárias sofrem grande deformações elásticas. MODELOS PARA SISTEMAS DE SUPORTE/GUIA Elementos Passivos Não há fonte de energia externa; Manufatura mais barata, projeto mais simples, mais robusto e menor custo de manutenção; Os esforços envolvidos dependem do movimento relativo entre os elementos e os corpos relacionados; Necessidade de conexões suaves entre os corpos contíguos por razões de conforto; As molas secundárias sofrem grande deformações elásticas. MODELOS PARA SISTEMAS DE SUPORTE/GUIA Elementos Ativos Necessidade de fonte de energia externa para consumo; Manufatura e manutenção mais onerosas, e projeto mais complexo; Os esforços envolvidos não dependem dos movimentos relativos e sua controlabilidade pode ser por sinal relativa ou absoluta; Suspensão secindária suave do corpo do veículo gerando baixas autofrequências; Possibilidade de ajuste contínuo das condições de equilíbrio; Baixo tempo de reação dos atuadores permitindo uma rápida compensação dos disturbios externos. MODELOS PARA SISTEMAS DE SUPORTE/GUIA Elementos Ativos Necessidade de fonte de energia externa para consumo; Manufatura e manutenção mais onerosas, e projeto mais complexo; Os esforços envolvidos não dependem dos movimentos relativos e sua controlabilidade pode ser por sinal relativa ou absoluta; Suspensão secindária suave do corpo do veículo gerando baixas autofrequências; Possibilidade de ajuste contínuo das condições de equilíbrio; Baixo tempo de reação dos atuadores permitindo uma rápida compensação dos disturbios externos. MODELOS PARA SISTEMAS DE SUPORTE/GUIA Elementos Ativos Necessidade de fonte de energia externa para consumo; Manufatura e manutenção mais onerosas, e projeto mais complexo; Os esforços envolvidos não dependem dos movimentos relativos e sua controlabilidade pode ser por sinal relativa ou absoluta; Suspensão secindária suave do corpo do veículo gerando baixas autofrequências; Possibilidade de ajuste contínuo das condições de equilíbrio; Baixo tempo de reação dos atuadores permitindo uma rápida compensação dos disturbios externos. MODELOS PARA SISTEMAS DE SUPORTE/GUIA Elementos Ativos Necessidade de fonte de energia externa para consumo; Manufatura e manutenção mais onerosas, e projeto mais complexo; Os esforços envolvidos não dependem dos movimentos relativos e sua controlabilidade pode ser por sinal relativa ou absoluta; Suspensão secindária suave do corpo do veículo gerando baixas autofrequências; Possibilidade de ajuste contínuo das condições de equilíbrio; Baixo tempo de reação dos atuadores permitindo uma rápida compensação dos disturbios externos. MODELOS PARA SISTEMAS DE SUPORTE/GUIA Elementos Ativos Necessidade de fonte de energia externa para consumo; Manufatura e manutenção mais onerosas, e projeto mais complexo; Os esforços envolvidos não dependem dos movimentos relativos e sua controlabilidade pode ser por sinal relativa ou absoluta; Suspensão secindária suave do corpo do veículo gerando baixas autofrequências; Possibilidade de ajuste contínuo das condições de equilíbrio; Baixo tempo de reação dos atuadores permitindo uma rápida compensação dos disturbios externos. MODELOS PARA SISTEMAS DE SUPORTE/GUIA Elementos Ativos Necessidade de fonte de energia externa para consumo; Manufatura e manutenção mais onerosas, e projeto mais complexo; Os esforços envolvidos não dependem dos movimentos relativos e sua controlabilidade pode ser por sinal relativa ou absoluta; Suspensão secindária suave do corpo do veículo gerando baixas autofrequências; Possibilidade de ajuste contínuo das condições de equilíbrio; Baixo tempo de reação dos atuadores permitindo uma rápida compensação dos disturbios externos. MODELOS PARA SISTEMAS DE SUPORTE/GUIA Elementos Ativos Necessidade de fonte de energia externa para consumo; Manufatura e manutenção mais onerosas, e projeto mais complexo; Os esforços envolvidos não dependem dos movimentos relativos e sua controlabilidade pode ser por sinal relativa ou absoluta; Suspensão secindária suave do corpo do veículo gerando baixas autofrequências; Possibilidade de ajuste contínuo das condições de equilíbrio; Baixo tempo de reação dos atuadores permitindo uma rápida compensação dos disturbios externos. MODELOS PARA SISTEMAS DE SUPORTE/GUIA Análise de Pneus Rígidos MODELOS PARA SISTEMAS DE SUPORTE/GUIA Análise de Pneus Deformáveis MODELOS PARA SISTEMAS DE SUPORTE/GUIA Análise de Pneus Deformáveis MODELOS PARA SISTEMAS DE SUPORTE/GUIA Análise de Pneus Deformáveis MODELOS PARA SISTEMAS DE SUPORTE/GUIA Forças de Contato: Pneu elástico-Rodovia rígida (Brush Model) MODELOS PARA SISTEMAS DE SUPORTE/GUIA Forças de Contato: Pneu elástico-Rodovia rígida (Brush Model) MODELOS PARA SISTEMAS DE SUPORTE/GUIA Forças de Contato: Pneu elástico-Rodovia rígida (Brush Model) MODELOS PARA SISTEMAS DE SUPORTE/GUIA Forças de Contato: Pneu elástico-Rodovia rígida (Brush Model) MODELOS PARA SISTEMAS DE SUPORTE/GUIA Forças de Contato: Deslizamento lateral puro MODELOS PARA SISTEMAS DE SUPORTE/GUIA Forças de Contato: Deslizamento lateral puro MODELOS PARA SISTEMAS DE SUPORTE/GUIA Forças de Contato: Deslizamento lateral puro MODELOS PARA SISTEMAS DE SUPORTE/GUIA Forças de Contato: Deslizamento lateral puro MODELOS PARA SISTEMAS DE SUPORTE/GUIA Forças de Contato: Deslizamento lateral puro MODELOS PARA SISTEMAS DE SUPORTE/GUIA Forças de Contato: Deslizamento longitudinal puro MODELOS PARA SISTEMAS DE SUPORTE/GUIA Forças de Contato: Deslizamento longitudinal puro MODELOS PARA SISTEMAS DE SUPORTE/GUIA Forças de Contato: Deslizamento longitudinal puro MODELOS PARA SISTEMAS DE SUPORTE/GUIA Forças de Contato: Deslizamento longitudinal puro MODELOS PARA SISTEMAS DE SUPORTE/GUIA Forças de Contato: Deslizamento longitudinal puro (lei linear) BIBLIOGRAFIA Jazar, R. N., Vehicle dynamics: theory and applications, Berlin, Springer, 2008. Crolla, D. A. Automotive engineering, New York, Elsevier, 2009. Popp, K., Schiehlen , W., Ground vehicle dynamics, Berlin, Springer, 2010. Blundell, M., Harty, D., Multibody systems approach to vehicle dynamics, New York, Elsevier, 2004. Jalón, J. G., Bayo, E., Kinematic and dynamic simulation of multibody systems, Berlin, Springer, 2001. Abe, M., Vehicle handling dynamics: theory and application, New York, Elsevier, 2009.
Download