Curso Prático & Objetivo
Direitos Autorais Reservados
ESTÁTICA DOS CORPOS RÍGIDOS
1.
Forças no plano
A Força representa a ação de um corpo sobre o outro e é caracterizada pelo seu
ponto de aplicação, sua intensidade, direção e sentido.
A intensidade de uma força é expressa em Newton (N) no Sistema Internacional de
Unidades (SI).
A direção de uma força é definida por sua linha de ação, ou seja, é a reta ao longo
da qual a força atua, sendo caracterizada pelo ângulo que forma com algum eixo fixo,
como indicado na Figura 1 abaixo.
F
F
α
α
Figura 2.1
O sentido da força é indicado por uma seta (vetor).
Denomina-se Grupo de forças, o conjunto de forças aplicadas em um único ponto
de um corpo.
Sistema de forças é o conjunto de forças aplicadas simultaneamente em pontos
diversos de um mesmo corpo.
2.
Equilíbrio de um ponto material
Ponto material é uma pequena porção de matéria que pode ser considerada como se
ocupasse um ponto no espaço.
Quando a resultante de todas as forças que atuam sobre um ponto material é nula,
este ponto está em equilíbrio. Este princípio é conseqüência da primeira lei de Newton: “se
a força resultante que atua sobre um ponto material é zero, este ponto permanece em
repouso (se estava originalmente em repouso) ou move-se ao longo de uma reta com
velocidade constante (se originalmente estava em movimento)”.
Para exprimir algebricamente as condições de equilíbrio de um ponto material,
escreve-se:
ΣF = R = 0
onde:
F = força
R = resultante das forças
Curso Prático & Objetivo
Direitos Autorais Reservados
01
Curso Prático & Objetivo
Direitos Autorais Reservados
F4
F1
A representação gráfica de todas as
forças que atuam em um ponto material
pode ser representada por um diagrama de
corpo livre, como indica a figura ao lado.
A
F2
F3
Figura 2.2
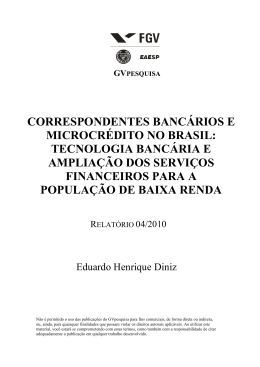
Exemplo: verificar se o sistema de forças indicado está em equilíbrio
As condições necessárias e suficientes
para o equilíbrio são:
y
ΣFx = 0
ΣFx = 1500 − 1000 sen30º −2000sen30º = 0
ΣFx = 1500 − 500 − 1000 = 0 ok
F4 = 2000N
30°
A F1 = 1500N
x
Σ Fy = 0
ΣFy = 2000 cos 30º −1000 cos 30º −866 = 0
F3 = 1000N
ΣFy = 1732 − 866 − 866 = 0 ok
30°
F2 = 866N
Resposta: O sistema de forças está em equilíbrio
3.
Resultante de uma força
Constata-se experimentalmente que duas forças P e Q que atuam sobre um ponto
material podem ser substituídas por uma única força R que tenha o mesmo efeito sobre
esse ponto material. Essa força é chamada de resultante de P e Q. Portanto, a resultante de
um grupo de forças é a força que, atuando sozinha, produz ação idêntica à produzida pelo
grupo ou sistema de forças. A resultante pode ser determinada por soluções gráficas ou
analíticas.
a) Soluções gráficas: quando um ponto material está em equilíbrio sob a ação de mais de
três forças o problema pode ser resolvido graficamente pelo desenho de um polígono de
forças, como indicado nas figuras abaixo.
Q
R
Q
R
Regra do paralelogramo
A
P
A
P
Curso Prático & Objetivo
Direitos Autorais Reservados
02
Curso Prático & Objetivo
Direitos Autorais Reservados
P
R=P+Q
Q
Regra do Triângulo
Q
R=P+Q
A
A
F1
P
F3
F2
R=F1+F2+F3
F1
Composição de forças
F3
F2
R=F1+F2
F3
F3
R=F1+F2-F3
y
F
Decomposição de forças
Fy
x
Fx
b) Soluções analíticas: os métodos analíticos utilizam a trigonometria e as equações de
equilíbrio.
Q=60 N
Exemplos
Determinar a Resultante das duas forças P e
Q agem sobre o parafuso A.
25º
A
Curso Prático & Objetivo
Direitos Autorais Reservados
20º
P=40 N
03
Curso Prático & Objetivo
Direitos Autorais Reservados
a. Soluções gráficas
R=98 N
R=98 N
Q=60 N
Q=60 N
35.0°
25º
A
20º
P=40 N
35.0°
P=40 N
A
Regra do paralelogramo
Regra do triângulo
b. Solução analítica: trigonometria
Cálculo da força resultante:
Lei dos cossenos: R 2 = P 2 + Q 2 − 2 PQ cos B
R 2 = 60 2 + 40 2 − 2 × 40 × 60 × cos 155º
R = 97,7 N
C
R
Cálculo do ângulo α
Lei dos senos
senA senB
senA sen155º
=
=
Q
R
60
97,7
senA = 0,25
A = 15º
α = A + 20º
α = 15º +20º = 35º
155°
A
Q=60 N
B
α
P=40 N
Sabendo-se que o parafuso está fixo, portanto em equilíbrio, existem forças de
reação que equilibram as forças Q e P. Este princípio é explicado pela terceira lei de
Newton: “A toda ação corresponde uma reação, com a mesma intensidade, mesma direção
e sentido contrário”.
R=97,7 N
Portanto, o parafuso está
reagindo por uma força de
Q=60 N
mesma intensidade da resultante
de P e Q, mas em sentido
35.0°
contrário. A força de reação
25º
P=40 N
Fx=80 N
pode ser decomposta em duas
20º
A
forças Fx e Fy, que são suas
35°
projeções sobre os eixos (x e y).
Fx = 97,7 × cos 35º = 80 N
Fy = 97,7 × sen35º = 56 N
R=97,7 N
Curso Prático & Objetivo
Direitos Autorais Reservados
Fy=56 N
04
Curso Prático & Objetivo
Direitos Autorais Reservados
Verificação do equilíbrio do ponto A
Para que o ponto A esteja em equilíbrio é necessário que a somatória de todas as forças que
n
∑F
agem no ponto A sejam nulas, ou seja:
n
=0
i =1
y
∑F
∑F
Q=60 N
25º
Fx=80 N
A
20º
x
=0
x
= 60 × cos 45º +40 × cos 20º −80 = 0
0=0
P=40 N
x
∑F
∑F
ok
y
=0
y
= 60 × sen 45º +40 × sen 20º −56 = 0
0=0
ok
Fy=56 N
Um caso particular da terceira lei de Newton é a lei da gravitação que trata da
atração da Terra sobre um ponto material localizado em sua superfície. A força de atração
exercida pela Terra sobre o ponto material é definida como o seu peso (P). a intensidade do
peso P de um ponto material de massa m é expresso como.
P = m⋅g
onde g=9,81 m/s2 é a aceleração da gravidade.
2. Determinar as forças
nos cabos.
B
C
P = m⋅g
P = 75 ( kg ) × 9,81 (m / s 2 )
P = 736 N
30°
75 kg
T AC
T AB
736
=
=
sen 60º sen 40º sen80º
40°
80°
60°
A
solução gráfica: desenho do polígono de forças.
TAB
736 N
50°
T AC
TAB = 647 N e TAC = 480 N
Curso Prático & Objetivo
Direitos Autorais Reservados
05
Curso Prático & Objetivo
Direitos Autorais Reservados
solução analítica: equações de equilíbrio.
ΣFx = 0
TAC ⋅ cos 30º −TAB ⋅ cos 50º = 0
T ⋅ cos 50º
T AC = AB
(1)
cos 30º
ΣF y = 0
TAB
TAC
50°
A
30°
T AB ⋅ sen50º +T AC ⋅ sen30º −736 = 0
Substituindo TAC pela relação (1), tem-se
736 N
T AB ⋅ cos 50º
⋅ sen 30º = 736
cos 30º
TAB = 647 N e TAC = 480 N
T AB ⋅ sen50º +
Exercícios
1. Determinar a força F e o ângulo α.
y
F
F
α
C
α
20°
A
B
50°
20°
x
50°
TA =2,5 kN
TB = 2,5 kN
Respostas: F=2,85 kN e α = 74,7º
2. Determinar as forças nos cabos
y
TA
A
60°
60°
x
20°
20°
m=50 kg
TB
B
P
Respostas: TA = 761,3 N e TB = 381 N
F3 = 15 N
3. Determinar a resultante do
sistema de forças indicado e o seu
ângulo de inclinação em relação ao
eixo x.
F2 = 20 N
70°
50°
F1 = 10 N
Curso Prático & Objetivo
Direitos Autorais Reservados
x
06
Curso Prático & Objetivo
Direitos Autorais Reservados
Roteiro:
a. Determinar inicialmente a resultante entre as forças F1 e F2 e seu respectivo ângulo (α12)
em relação ao eixo x. Chamar a resultante de R12;
b. Em seguida, determinar a resultante de todo o sistema, chamando-a de R123 (R123 é a
resultante entre R12 e F3);
c. Finalmente, determinar o ângulo (α123) de R123 em relação ao eixo x.
Respostas: R123 = 32,19 N e α123 = 61,46º
4. Determinar o valor da força F.
a)
b)
y
y
200 N
300 N
60°
159,65 N
60°
F
x
30°
20°
x
346,41 N
F
Resp. F = 314,41 N
c)
Resp. F = 400 N
d)
y
y
250 N
141,42 N
F
45°
F
30°
x
45°
45°
120 N
60°
91,9 N
x
141,42 N
Resp. F = 200 N
e)
Resp. F = 255,45 N
f)
y
450 N
329,36 N
F
100 N
65°
100 N
45°
60°
45°
x
70°
61 kg
F
Resp. F = 321,74 N
Resp. F=268,95 N
Curso Prático & Objetivo
Direitos Autorais Reservados
07
Curso Prático & Objetivo
Direitos Autorais Reservados
4.
Momento de uma força
Define-se Momento como a tendência de uma força F fazer girar um corpo rígido
em torno de um eixo fixo. O Momento depende do módulo de F e da distância de F em ao
eixo fixo.
Considere-se uma força F que atua em um
corpo rígido fixo no ponto 0, como indicado na
figura.
A força F é representada por um vetor que
define seu módulo, direção e sentido. O vetor d é a
distância perpendicular de 0 à linha de ação de F.
M0
F
d
0
A
Define-se o momento escalar do vetor F em relação a 0, como sendo
M0 = F × d
onde: M0= momento escalar do vetor F em relação ao ponto 0
0 = pólo ou centro de momento
d= distância perpendicular de 0 à linha de ação de F, também chamada de braço de
alavanca
O momento M0 é sempre perpendicular ao plano que contém o ponto 0. O sentido
de M0 é definido pelo sentido de rotação imposto pelo vetor F.
Convenciona-se momento positivo
se a força F tender a girar o corpo no
M+
Msentido anti-horário e negativo, se tender a
girar o corpo no sentido horário.
No SI, onde a força é expressa em newtons (N) e a distância em metros (m).
Portanto, o momento é expresso em newtons × metros (N × m).
4.1.
Momento de um sistema de forças coplanares
Chama-se Momento de um sistema de forças coplanares S={(F1,A1),....,(Fn,An)} em
relação ao ponto 0, à soma algébrica dos Momentos de cada força em relação ao mesmo
ponto 0.
F1
F2
b1
A1
4.2.
b2
0
A3
A2
b3
F3
n
M S ,0 = ∑ M F i ,0
i =1
Teorema de Varignon
Seja R a resultante do sistema de forças S. “O
Momento da resultante de um sistema de forças em relação a
um ponto é igual ao momento do sistema ou seja, a soma
algébrica dos Momentos de todas as forças componentes em
relação ao mesmo ponto O”.
Curso Prático & Objetivo
Direitos Autorais Reservados
n
M R ,0 = M S ,0 = ∑ M F i ,0
i =1
08
Curso Prático & Objetivo
Direitos Autorais Reservados
4.3.
Momento de um binário
Duas forças F e –F que tenham o mesmo módulo, linhas de ação paralelas e
sentidos opostos formam um binário. A soma das componentes das duas forças em
qualquer direção é zero. Entretanto, a soma dos momentos das duas forças em relação a um
dado ponto não é zero. Apesar de as duas forças não transladarem o corpo no qual atuam,
tendem a fazê-lo girar.
A1
F1
b
-F1
A2
Exemplos
1. Uma força de 450 N é aplicada no ponto A como ilustrado na figura. Determinar:
30°
300mm
a) o momento da força em relação a D;
A
125mm
b) a menor força aplicada em D que ocasiona
o mesmo momento em relação a D;
D
225mm
c) o módulo e o sentido da força vertical que,
aplicada em C, produz o mesmo momento em
relação a D;
d) a menor força que, aplicada em C,
ocasiona o mesmo momento em relação a D.
30°
125mm
300mm
a) braço de alavanca 197,3 mm
225mm
Momento M=F×b
.3m
m
M=450×197,3= 88785 N.mm ou
225mm
C
125mm
M= 88,8 N.m
B
30°
300mm
225mm
B
Solução
30°
52.6°
19
7
C
450 N
37.4°
D
225mm
A
22.6°
325
450 N
A
D
450 N
b) Para se obter a menor força aplicada
em B que ocasiona o mesmo momento
em relação a D, deve-se utilizar o
maior braço de alavanca, ou seja:
b = 225 2 + 300 2 = 375 mm
37
5m
m
F=
36.9°
225mm
C
53.1°
B
M
b
c) F =
F=
M
b
88,8
= 236,8 N
0,375
F=
Curso Prático & Objetivo
Direitos Autorais Reservados
88,8
= 394,7 N
0,225
09
Curso Prático & Objetivo
Direitos Autorais Reservados
30°
300mm
b = 225 2 + 225 2 = 318,2 mm
F=
M
b
F=
A
D
31
8,
2
225mm
125mm
d) A menor força que, aplicada em C,
ocasiona o mesmo momento em relação a D é
aquela cujo braço de alavanca é o maior
possível, ou seja:
450 N
88,8
= 279 N
0,3182
m
m
225mm
C
B
2. A figura abaixo representa uma junta rebitada, composta por dois rebites de mesmo
diâmetro. Determinar as forças horizontais e verticais atuantes nos rebites.
Como os rebites são iguais, as cargas e as reações verticais em cada rebite também
são iguais: RAV= RBV= 3000÷2= 1500 N.
O rebite A está sendo “puxado” para a direita, portanto, possuirá uma reação
horizontal para a esquerda;
3000 N
600mm
O rebite B está sendo
“empurrado” para a esquerda,
portanto, possuirá uma reação
horizontal para a direita.
dos
esforços
A
RAV
200mm
Determinação
horizontais:
∑MA = 0
R AH
B
RBH×200=3000×600 = 9000 N
RAH= RBH=9000 N
R BH
RBV
B
30
0m
m
3. Determinar o Momento em A devido ao
binário de forças ilustrado na figura
30°
MA= F×b
MA= 500×0,12 = 60 N.m
120mm
F1=500 N
A
F2=500 N
Curso Prático & Objetivo
Direitos Autorais Reservados
10
Curso Prático & Objetivo
Direitos Autorais Reservados
B
30
0
mm
4. Substituir o binário da figura por uma
força F vertical aplicada no ponto B.
30°
F1=F2= 500 N
F=400 N
F=
M
b
F=
120mm
MA= F×b
60
= 400 N
0,15
A
150mm
MA =60N.m
5. Substituir o binário e a força F ilustrados
na figura por uma única força F=400 N,
aplicada no ponto C da alavanca.
Determinar a distância do eixo ao ponto de
aplicação desta força.
C
300
mm
AC
B
MA= (400×0,15) + (200×0,12) = 84 N.m
AC =
F=400 N
200 N
210
= 420 mm
cos 60º
A
120mm
84
d=
= 0,21 m = 210 mm
400
M
d=
F
30°
MA
200 N
150mm
d=210mm
5. Determinar a intensidade da força F para que
atue no parafuso o torque (momento) de 40 N.m.
a=
200
= 217 mm = 0,217 m
cos 23º
MA= F×b
F=
M
b
F=
40
= 184,1 N
0,217
6. Um grifo é utilizado para rosquear um tubo de φ 20 mm a uma luva, como mostra a
figura. Determinar a intensidade da força F exercida pelo grifo no tubo, quando a força
aplicada no aperto for 40 N.
∑M
A
=0
40 × 180 = F × 30
F=
40 × 180
= 240 N
30
Curso Prático & Objetivo
Direitos Autorais Reservados
11
Curso Prático & Objetivo
Direitos Autorais Reservados
4.4.
Equilíbrio de corpos rígidos
Um corpo rígido está em equilíbrio quando todas as forças externas que atuam
sobre ele formam um sistema de forças equivalente a zero, isto é, quando todas as forças
externas podem ser reduzidas a uma força nula e a um binário nulo.
ΣF = 0
ΣM 0= 0
As expressões acima definem as equações fundamentais de Estática.
Decompondo cada força e cada momento em suas componentes cartesianas,
encontram-se as condições necessárias e suficientes para o equilíbrio de um corpo rígido
no espaço:
z
0
ΣFx = 0
Σ Fy = 0
ΣFz = 0
ΣM x= 0
ΣM y= 0
ΣM z= 0
x
y
Equilíbrio ou em duas dimensões
As condições de equilíbrio de um corpo rígido simplificam-se consideravelmente
no caso de uma estrutura bidimensional. Escolhendo os eixos x e y no plano da estrutura,
tem-se:
y
Fz = 0
0
M x= M y= 0
M z= M 0
x
para cada uma das forças aplicadas ao corpo rígido, então as seis equações de equilíbrio no
espaço reduzem-se a:
ΣFx = 0
ΣFy = 0
ΣM A= 0
onde A é um ponto qualquer no plano da estrutura. Estas três equações podem ser
resolvidas para um máximo de três incógnitas.
O equilíbrio em duas dimensões é também conhecido como equilíbrio no plano.
Curso Prático & Objetivo
Direitos Autorais Reservados
12
Curso Prático & Objetivo
Direitos Autorais Reservados
5.
Apoios
Para o estudo do equilíbrio dos corpos rígidos não bastam conhecer somente as
forças externas que agem sobre ele, mas também é necessário conhecer como este corpo
rígido está apoiado.
Apoios ou vínculos são elementos que restringem os movimentos das estruturas e
recebem a seguinte classificação:
Apoio móvel
• Impede movimento na direção normal (perpendicular) ao
plano do apoio;
• Permite movimento na direção paralela ao plano do
ou
apoio;
• Permite rotação.
Apoio fixo
• Impede movimento na direção normal ao plano do apoio;
• Impede movimento na direção paralela ao plano do
apoio;
• Permite rotação.
Engastamento
• Impede movimento na direção normal ao plano do apoio;
• Impede movimento na direção paralela ao plano do
apoio;
• Impede rotação.
Curso Prático & Objetivo
Direitos Autorais Reservados
13
Curso Prático & Objetivo
Direitos Autorais Reservados
6.
Tipos de Estruturas
As estruturas são classificadas em função do número de reações de apoio ou
vínculos que possuem. Cada reação constitui uma incógnita a ser determinada.
Para as estruturas planas, a Estática fornece três equações fundamentais:
ΣFx = 0
6.1.
ΣFy = 0
ΣM A= 0
Estruturas hipostáticas
Estruturas hipostáticas são aquelas cujo número de reações de apoio ou vínculos é
inferior ao número de equações fornecidas pelas condições de equilíbrio da Estática.
A figura ao lado ilustra um tipo de estrutura
hipostática. As incógnitas são duas: RA e RB. Esta
estrutura não possui restrição a movimentos
horizontais.
P
A
B
L
RA
6.2.
RB
Estruturas isostáticas
Estruturas isostáticas são aquelas cujo número de reações de apoio ou vínculos é
igual ao número de equações fornecidas pelas condições de equilíbrio da Estática.
No exemplo da estrutura da figura, as
incógnitas são três: RA, RB e HA. Esta estrutura está
fixa; suas incógnitas podem ser resolvidas somente
pelas equações fundamentais da Estática.
P
HA
A
B
L
RA
6.3.
RB
Estruturas hiperestáticas
Estruturas hiperestáticas são aquelas cujo número de reações de apoio ou vínculos é
superior ao número de equações fornecidas pelas condições de equilíbrio da Estática.
Um tipo de estrutura hiperestática es’ta
ilustrado na figura ao lado. As incógnitas são quatro:
RA, RB, HA e MA. As equações fundamentais da
Estática não são suficientes para resolver as equações
de equilíbrio. São necessárias outras condições
relativas ao comportamento da estrutura, como, p.
ex., a sua deformabilidade para determinar todas as
incógnitas.
MA
P
HA
Curso Prático & Objetivo
Direitos Autorais Reservados
A
B
L
RA
RB
14
Baixar