APLICAÇÃO DA TRANSFORMADA DE PARK NA DETECÇÃO ADAPTATIVA DE
FALTAS DE ALTA IMPEDÂNCIA EM SISTEMAS DE DISTRIBUIÇÃO DE ENERGIA
ELÉTRICA CONSIDERANDO A PRESENÇA DE RUÍDOS
A.L. BETTIOL*
NEO DOMINO
Brasil
L.U. IURINIC
UFRGS
Brasil
R.G. FERRAZ
UFRGS
Brasil
A.S. BRETAS
UFRGS
Brasil
A. CARNIATO
NEO DOMINO
Brasil
L.F.N. PASSOS
NEO DOMINO
Brasil
I.K. KHAIRALLA
CELESC DISTRIBUIÇÃO
Brasil
R.Z. HOMMA
CELESC DISTRIBUIÇÃO
Brasil
A. BAADER
CELESC DISTRIBUIÇÃO
Brasil
Resumo – Este artigo aborda o problema das faltas de alta impedância e a sua detecção em sistemas
de distribuição de energia elétrica. Uma formulação para detectar este tipo de falta é proposta, a qual
consiste na consideração de um sinal apropriado, obtido mediante a transformada de Park e um conjunto de
filtros digitais. O sinal de detecção é avaliado por um algoritmo de discriminação cujo funcionamento é
baseado em um limiar adaptativo segundo o nível de ruído presente no sinal monitorado e uma lógica de
confidência acumulativa. Para avaliar a abordagem proposta, são apresentados estudos de casos simulados
e um caso real, os quais demonstram que os distúrbios são corretamente detectados com uma relação sinalruído de até 40 dB. Vários distúrbios podem ser detectados de forma automática e transitórios de baixa
energia também podem ser capturados pelo algoritmo. O presente trabalho faz parte de um projeto de
Pesquisa e Desenvolvimento (projeto 5697-7112/2012) em conjunto com a Centrais Elétricas de Santa
Catarina - Distribuição, que atualmente se encontra na etapa de implementação do algoritmo proposto em
um relé digital.
Palavras chave: Detecção – Faltas de Alta Impedância – Sistemas de Distribuição – Transformada de
Park
1
INTRODUÇÃO
Uma falta (ou defeito) é caracterizada pelo contato acidental entre fases ou entre fases e a terra, ocasionando
mudanças nos valores nominais de tensões e correntes de um Sistema Elétrico de Potência (SEP). Ainda,
uma Falta de Alta Impedância (FAI) resulta do contato de um condutor energizado com uma superfície de
elevada resistência elétrica e caracteriza-se por baixas correntes de falta e ocorrência de arco elétrico [1]. Em
Sistemas de Distribuição de Energia Elétrica (SDEE), as FAI apresentam correntes de falta com magnitude
menor do que as correntes nominais das cargas, em muitos casos da ordem de 10 a 50 A. Também
apresentam reignição do arco elétrico próximo da passagem da corrente por zero e podem apresentar
correntes de falta com comportamentos erráticos Devido a estas características, uma FAI não pode ser
detectada e eliminada por dispositivos convencionais de proteção, tais como relés de sobrecorrente [2].
Embora muitas técnicas para detecção de FAI tenham sido desenvolvidas ao longo das últimas décadas, a
detecção deste tipo de falta continua sendo um grande desafio para pesquisadores, engenheiros e
concessionárias de energia elétrica. Uma extensa revisão da literatura sobre detecção de FAI é apresentada
em [3], onde são apresentadas as principais técnicas, tais como aos baseadas em: magnitude de fase, espectro
de alta frequência, filtros, transformada wavelet e inteligência artificial. Sendo a Transformada Wavelet
Discreta (TWD) a técnica para detecção de FAI mais utilizada.
* Dirección postal completa del Autor principal (opcional) – e-mail (obligatorio)
A TWD [4] consiste na decomposição de um dado sinal discreto original em um conjunto de sinais, onde
cada um destes sinais é um detalhe do sinal original em uma distinta faixa de frequência. Tal decomposição
pode ser utilizada para a detecção do instante da ocorrência de um dado transitório eletromagnético e
identificar uma FAI pela periodicidade da reignição do arco elétrico próximo da passagem da corrente por
zero [5] [6]. Entretanto, como desvantagem da aplicação da TWD destaca-se a dependência do significado de
cada detalhe com relação à frequência de amostragem. Portanto, outras técnicas de filtragem podem ser
utilizadas como as baseadas na transformada de Park [7] [8].
Além das dificuldades inerentes às características elétricas das FAI, a presença de ruídos nos sinais
amostrados de tensões e correntes, registrados por dispositivos de oscilografia (como relés de proteção e
registradores digitais de perturbações), mostra-se como a principal limitação dos algoritmos de detecção
apresentados na literatura técnica. Desta forma, a abordagem proposta neste trabalho se baseia na
transformada de Park e utiliza o nível de ruído presente nos sinais registrados na subestação de distribuição
como limiar adaptativo para a correta detecção de FAI em sistemas de distribuição.
A robustez do algoritmo proposto é analisada inicialmente a partir de simulações de FAI fase-terra,
realizadas no programa Alternative Transient Program (ATP) [9] e utilizando-se o sistema teste IEEE-13
barras. Contudo, sua aplicação em dados de oscilografias de faltas reais, como parte do projeto de Pesquisa e
Desenvolvimento (P&D) em conjunto com a Centrais Elétricas de Santa Catarina - Distribuição (CELESC
DISTRIBUIÇÃO), ratifica a validade da abordagem proposta. Assim, os resultados preliminares comprovam
que o algoritmo proposto possui grande potencial para a detecção de FAI em sistemas de distribuição.
2
FORMULAÇÃO PROPOSTA
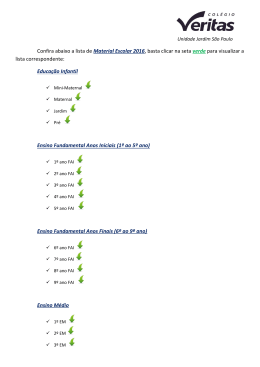
A Fig. 1 apresenta um diagrama de blocos que mostra de forma geral o método proposto. Nesta figura é
possível observar duas etapas básicas denominadas como transformação e discriminação, a primeira consiste
em gerar um sinal onde as características dos distúrbios são mais simples de detectar e a segunda consiste em
um algoritmo lógico capaz de discriminar o início dos distúrbios. Desta forma, a transformada de Park
(TDQ) é aplicada ao sinal trifásico composto pelas tensões de fase. Tal transformada realiza uma projeção do
sinal trifásico sobre um marco de referência rotatório, cuja frequência angular é fixada na frequência nominal
do sistema de potência. Desta maneira os sinais vd e vq apresentam um valor constante exceto nos momentos
em que existe um transitório, característica interessante para gerar sinais de detecção. Posteriormente os
sinais vd e vq são compostos (trigonometricamente) pelo bloco “abs” e o sinal resultante é enviado a um bloco
de filtragem digital encarregado de gerar o sinal de detecção d. O bloco de filtragem é projetado para
eliminar a componente contínua dos sinais e eliminar a segunda harmônica gerada pelo desequilíbrio do sinal
trifásico, como é explicado na seguinte subsecção.
A segunda etapa da abordagem proposta consiste em enviar o sinal d ao bloco de discriminação. Este bloco
consiste em um algoritmo que gera um limiar baseado no valor máximo de amostras contidas em uma janela
móvel. Finalmente, mediante uma lógica de confidência acumulativa os distúrbios são detectados e
armazenados no vetor Td.
Nas secções seguintes, cada parte do método proposto é explicado em detalhe.
vc
vd
vq
vdq
Filtragem
d
Bloco de discriminação
vb
abs
va
Transformada de
Park
Bloco de transformação
Td
Fig. 1. Diagrama de blocos da abordagem proposta.
3
BLOCO DE TRANSFORMAÇÃO
O bloco de transformação tem a finalidade de transformar os sinais medidos no sistema elétrico de potência
em um ou mais sinais onde as características do distúrbio a ser detectado são mais significativas. Este bloco
está composto pela transformada de Park mais um bloco de filtragem, ambos sub-blocos são explicados a
seguir.
2
3.1 Transformada de Park
A aplicação mais conhecida da Transformada de Park se encontra na análise de máquinas elétricas rotativas,
transformando as indutâncias variáveis do estator em indutâncias constantes sobre um marco de referência
rotatório com velocidade síncrona [10]. Esta transformada pode ser escrita em forma matricial para um
instante de tempo t, da seguinte maneira:
cos p (t )
cos p (t ) 2 3
cos p (t ) 2 3 v (t )
vd (t )
a
v (t ) 2 sen (t ) sen (t ) 2 3 sen (t ) 2 3 v (t ) .
(1)
p
p
p
b
q
3
v0 (t )
1 2
vc (t )
1 2
1 2
Na equação (1), a rotação do marco de referência foi escrita de forma generalizada utilizando a função de
fase variante no tempo p(t), considerada como p(t)=pt+p, onde p é a velocidade angular constante de
rotação em dada em radianos/s e p um ângulo qualquer dado em radianos.
A fins analíticos, os sinais vd e vq são compostos para formar sinal complexo:
vdq (t ) vd (t ) j vq (t )
m(t ) e j (t ) e
j p ( t )
,
(2)
m(t ) m12 (t ) m22 (t ),
(3)
onde:
m1 (t )
2
1
1
va (t ) vb (t ) vc (t ) ,
3
2
2
(4)
2 3
vb (t ) vc (t ) ,
3 2
(5)
m2 (t )
(t ) arg m1 (t ) j m2 (t ) .
(6)
O sinal v0 não é utilizado na abordagem proposta. Visando entender o sentido da aplicação da transformada
de Park de uma maneira simples, define-se o seguinte sinal:
(7)
M (t ) m(t ) e j (t ) .
Finalmente, substituindo na equação (2) o sinal definido em (7) resulta na seguinte expressão para o sinal vdq:
j ( t )
vdq (t ) M (t ) e p .
(8)
Esta última equação diz que a transformada de Park modula o sinal complexo M(t) com a função exp(jp(t)),
deslocando o seu espectro de frequências para a parte negativa do mesmo segundo a quantidade p.
O sinal M(t) definido na equação (7) equivale à aplicação da transformada αβ, amplamente utilizada na
análise de SEP [11]. Por conseguinte, quando a equação (8) é aplicada em um conjunto trifásico de sinais
(tensões de fase neste caso), denominados como va, vb e vc, é possível salientar os seguintes casos
particulares:
vd e vq são constantes se o conjunto trifásico va, vb e vc. é balanceado, sem harmônicos nem componentes
transitórias;
aparece uma componente de segunda harmônica superposta nos sinais constantes vd e vq, se existe algum
desequilíbrio no conjunto va, vb e vc;
se existem harmônicos presentes no conjunto va, vb e vc, vd e vq apresentam o mesmo harmônico deslocado
segundo p (considerado igual a 0), o mesmo acontece com o espectro de frequências das componentes
transitórias;
os harmônicos balanceados múltiplos de três são cancelados pela transformada de Park e não têm
influência sobre vd e vq.
A primeira característica é considerada como a razão base para utilizar a transformada de Park como técnica
de filtragem, por permitir uma eliminação eficiente da influência da componente de frequência fundamental.
3.2 Filtragem
3
O bloco de filtragem é constituído por três etapas: um filtro de diferença finita, um filtro de entalhe e um
filtro não linear de densidade de potência. A primeira etapa, diferença finita, consiste em subtrair o valor da
amostra anterior ao valor da amostra atual atual do sinal dado pelo módulo de vdq:
x[n] vdq [n] vdq [n 1] .
(9)
Esta operação tem o objetivo de eliminar a componente contínua do sinal vdq e facilitar a implementação do
algoritmo de detecção.
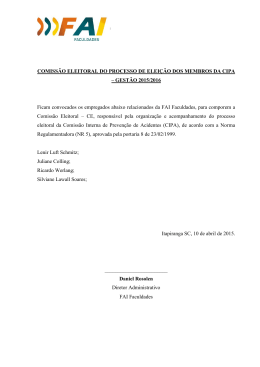
A segunda etapa, filtro de entalhe, consiste em eliminar a componente de segunda harmônica produzida pelo
desequilíbrio das tensões. O filtro é implementado segundo a estrutura apresentada na Fig. 2.
x[n]
b2
z 11
z4[n]
z 11
z3[n]
-a3
b1
z 11
z2[n]
-a2
b0
z 11
z1[n]
G
y[n]
-a1
Fig. 2. Estrutura direta tipo II do filtro IIR para eliminação da segunda harmônica.
Os valores utilizados nos coeficientes do filtro são apresentados na TABELA I. Tais coeficientes foram
projetados para uma frequência de amostragem de 15360 Hz (ou 256 amostras por ciclo de 60 Hz) utilizando
o processamento de ponto flutuante de 64 bits do Matlab®. Os mesmos são diferentes para outras
frequências de amostragem e podem apresentar variações segundo a plataforma em que o filtro é
implementado. O valor adotado para a constante G é de 10.
TABELA I. VALORES DOS COEFICIENTES DO FILTRO
coeficiente\i
ai
bi
0
1
0,01
1
-3,599
-0,019976
2
4,859
0,01
3
-2,9155
-
4
0,6561
-
Na etapa final da filtragem é proposta a utilização de um filtro não linear para aumentar a influência dos
transitórios e diminuir a influência do ruído. Este filtro eleva ao quadrado cada amostra atingindo um valor
proporcional à densidade de potência no tempo do sinal y[n]. Desta maneira é gerado o sinal de detecção d[n]
que é analisado pelo bloco de discriminação.
2
(10)
d [n] y[n] .
4
BLOCO DE DISCRIMINAÇÃO
Após a etapa de filtragem é possível assumir que o sinal de detecção d[n] está composto unicamente por
ruído e transitórios. Se nenhum tipo de ruído estiver presente no sinal a detecção seria simples porque
qualquer valor diferente de zero seria uma anomalia para detectar e analisar. Entretanto, como nos casos
reais o ruído é inevitável, o algoritmo de detecção deve considerar obrigatoriamente esta característica. Tal
consideração é feita geralmente pela fixação de algum limiar em conjunto com algum algoritmo de decisão.
O problema que decorre ao se considerar um limiar fixo é que previamente deve ser realizado um estudo
visando conhecer os níveis normais de ruído presentes no sistema. Ainda, se este nível de ruído varia por
alguma razão, o limiar fixado pode não funcionar como deveria. Portanto, a ideia neste projeto é definir um
limiar que automaticamente se adapte aos níveis de ruído presentes no sinal de detecção e esta tarefa é
implementada dentro do bloco de discriminação.
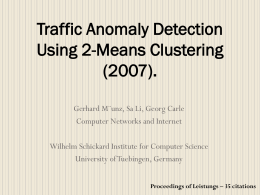
O bloco de discriminação está composto pelo algoritmo de detecção, o qual define um limiar em função do
valor máximo do sinal d[n], contido dentro de uma janela localizada em amostras passadas. Esta proposta é
explicada de forma mais clara pelo fluxograma da Fig. 3. Onde as seguintes variáveis ajustáveis são
definidas: N: tamanho da janela [amostras]; D: atraso da janela [amostras]; η: um fator de tolerância; Tc:
limiar contador; Tτ: limiar de tempo.
Basicamente o algoritmo começa com a definição das variáveis internas, assumindo que L é o comprimento
do sinal d[n]. Verifica-se no fluxograma da Fig. 3 que os transitórios não podem ser detectados nas primeiras
N+D amostras, pois o algoritmo ainda está sendo adaptado. Quando este processo finaliza, o limiar é
4
definido como o valor máximo dentro da janela de tamanho N que se encontra atrasada D amostras a partir
da amostra atual n. O valor assim obtido é multiplicado por um fator de tolerância η para gerar o limiar e
cada vez que a amostra atual em d[n] excede tal limiar, a variável c é incrementada em 1. Na primeira vez
que o limiar é excedido, o mesmo fica estático, enquanto que cada passo das amostras na sequência d[n]
incrementa em 1 a variável t. Se a variável c atinge o valor Tc antes que t chegue ao valor Tτ, o transitório é
confirmado e o cálculo do limiar é reinicializado. A partir desta primeira detecção, o algoritmo é incapaz de
detectar outros transitórios durante as seguintes N+D amostras. Por outro lado, se t chega ao valor Tτ antes
que c chegue ao valor de Tc, o evento é considerado como um sinal espúrio ou alguma mudança nos níveis
de ruído, portanto nenhum transitório é detectado.
inicio
n=1; q=0; in=1; Fl=0;
kn=1; c=0; t=0;
n>L
Sim
fim
Não
Não
Fl=0
Sim
q=q+1
q≤ N
Sim
M=max{d[in-1+q],d[in-2+q],...,d[in]}
Thr[n]=M*η
Não
M=max{d[n-D],d[n-D-1],...,d[n-D-N+1]}
Thr[n]=M*η
Não
Não
n=n+1
q≤ N+D
Thr[n]=M*η
d[n]>Thr[n]
Não
Fl=1;
c=c+1;
na[c]=n
Não
Não
Fl=1
Sim
t=t+1
t>Tτ
Sim
Não
Detecção & Reset
T[kn]=na[1];
kn=kn+1; t=0; c=0;
Fl=0; q=0; in=n+1
Sim
c>Tc
Reset
t=0; c=0; Fl=0;
q=N+D+1; in=n+1;
Não
Fig. 3. Bloco de discriminação: algoritmo de detecção.
5
ESTUDOS DE CASO E RESULTADOS
Esta secção expõe a validação da formulação proposta para detecção de FAI mediante simulações e um
exemplo de um caso real. As simulações foram realizadas sobre o do sistema padrão de 13 barras da IEEE
[12], substituindo o regulador de tensão da subestação por um transformador. A modelagem e simulação foi
realizada mediante o programa ATP [9] e toda a formulação proposta para detecção de FAI foi
implementada e avaliada mediante o programa Matlab® [13]. Visando modelar o efeito dos conversores
5
analógico-digitais, as simulações foram feitas com um passo de integração de 10-7 s, os sinais obtidos foram
passados por filtros anti-aliasing e foram amostrados com uma frequência de 15360 Hz. As FAI foram
modeladas segundo [14].
5.1 Simulações de faltas de alta impedância
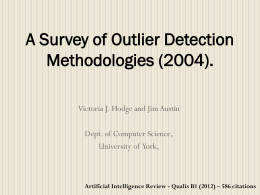
Várias simulações foram realizadas aplicando FAI em todos os nós do sistema de distribuição teste e todas
resultaram em detecções satisfatórias. Nesta secção são apresentados dois casos considerados como os mais
desfavoráveis, em que a FAI está situada na metade do trecho que conecta os nós mais afastados da
subestação, os nós 684 e 652. As FAI aplicadas são denominadas como F1 e F2 e os seus parâmetros se
mostram na TABELA II. O algoritmo foi avaliado com e sem ruído presente nos sinais de tensão, sendo a
Relação Sinal-Ruído (RSR) igual a 40 dB para o caso com ruído. A Fig. 4 mostra o sinal de detecção d[n] e o
limiar adaptativo para os casos acima mencionados. Nesta figura é possível observar que a pesar de existir
uma RSR considerável, o limiar adaptativo aumenta em forma automática e o algoritmo continua
funcionando de forma correta.
Fig. 4. Sinal de detecção (linha-ponto) e limiar adaptativo (linha cheia): a) FAI F1 sem ruído; b) FAI F1 com
ruído (RSR = 40 dB); c) FAI F2 sem ruído; d) FAI F2 com ruído (RSR = 40 dB).
Os parâmetros fixados no o algoritmo de detecção apresentado na Fig. 3, que constitui o bloco de
discriminação mostrado na Fig. 1 são: N: 256; D: 64; η: 0.1; Tc: 32; Tτ: 256.
TABELA II. PARÂMETROS DAS FAI SIMULADAS.
F1
F2
Resistência [Ω]
50
100
Indutância [H]
0.0424
0.0531
Tensão fonte + [V]
1495
1269
Tensão fonte – [V]
1580
1675
5.2 Um Caso real
A formulação proposta também foi avaliada sobre um sinal oscilográfico real obtido mediante um registrador
digital de perturbações instalado em uma subestação na cidade de Brusque (Santa Catarina). Este registrador
monitora o sistema de transmissão e alguns alimentadores, sendo que o evento foi uma FAI que evoluiu para
um curto monofásico, sendo assim registrado no período de pré-falta este comportamento. A Fig. 5 mostra a
evolução no tempo do sinal de detecção d[n] e o limiar adaptativo. Os detalhes apresentados na figura
mostram a detecção de três eventos denominados como T1 a 0,481 s, T2 a 0,536 s e T3 a 1,41 s. Foi
verificado que os eventos pertencem a uma FAI ocorrida no sistema de distribuição. Os parâmetros
utilizados no algoritmo de detecção são os mesmos utilizados nas simulações.
6
Fig. 5. Sinal de detecção (linha-ponto) e limiar adaptativo (linha cheia).
6
CONCLUSÕES
Neste artigo foi apresentada uma nova formulação para detectar FAI, baseada na detecção dos transitórios
que esta produz nos sinais de tensões de fase. A abordagem se encontra dividida em duas etapas básicas: a
primeira consiste na geração de um sinal de detecção onde as características dos distúrbios são simples de
detectar, a qual é realizada mediante a transformada de Park e um conjunto de filtros digitais; a segunda é
constituída por um algoritmo de discriminação dedicado à detecção da FAI, que compara o sinal de detecção
com um limiar ajustável segundo o nível de ruído contido nos sinais.
Os estudos realizados com simulações do sistema padrão de 13 barras da IEEE mostrou resultados
satisfatórios quando as FAI foram aplicadas em todos os nós do sistema. As figuras apresentadas mostram
que a pesar de inserir uma RSR elevada, o sinal de detecção excede significativamente o limiar adaptativo,
intuindo que a detecção é confiável para uma generalidade de casos. O caso real que foi apresentado mostra
como o algoritmo proposto pode detectar de forma automática vários eventos em uma mesma oscilografía.
Ainda mostra que transitórios que são imperceptíveis nos sinais trifásicos, como o caso do evento T3, podem
ser detectados com sucesso.
A formulação aqui proposta forma parte de um projeto P&D na CELESC DISTRIBUIÇÃO que atualmente
se encontra na etapa de implementação do algoritmo em um relé digital, destinado à indicação de um alarme
quando uma FAI é detectada.
7
REFERENCIAS
[1] J. Tengdin, R. Westfall e K. Stephan, “High impedance fault detection technology,” Report of PSRC
Working group D, vol. 15, 1996.
[2] R. D. Christie, H. Zadehgol e M. M. Habib, “High impedance fault detection in low voltage networks,”
IEEE Transactions on Power Delivery, vol. 8, pp. 1829-1836, October 1993.
[3] M. Sedighizadeh, A. Rezazadeh e N. I. Elkalashy, “Approaches in high impedance fault detection: a
chronological review,” Advances in Electrical and Computer Engineer, vol. 10, pp. 114-128, 2010.
[4] Z. Xiaoli, Z. Xiangjun, L. Li, S. Choi e W. Yuanyuan, “Fault location using wavelet energy spectrum
analysis of traveling waves,” em Power Engineering Conference, 2007.
[5] C.-H. Kim, H. Kim, Y.-H. Ko, S.-H. Byun, R. K. Aggrawall e A. T. Johns, “A novel fault-detection
technique of high-impedance arcing faults in transmission lines using the wavelet transform,” IEEE
Transactions on Power Delivery, vol. 14, pp. 921-929, October 2002.
[6] N. I. Elkalashy, M. Lehtonen, H. A. Darwish, A. M. Taalab e M. A. Izzularab, “DWT-based detection
and transient power direction-based location of high-impedance faults due to leaning trees in unearthed
MV networks,” IEEE Transactions on Power Delivery, vol. 28, pp. 94-101, January 2008.
[7] R. G. Ferraz, L. U. Iurinic, A. S. Bretas e A. D. Filomena, “Park’s transformation analytical approach of
transient signal analysis for power systems,” in North American Power Symposium, Illinois, 2012.
[8] F. V. Lopes, D. Fernandes e W. L. A. Neves, “A traveling-wave detection method based on Park's
transformation for fault locators,” IEEE Transactions on Power Delivery, vol. 28, pp. 1626-1634, July
2013.
[9] “Comité argentino de usuários del EMTP/ATP,” [Online]. Available:
https://sites.google.com/site/atpcaue/home.
[10] P. Kundur, Power system stability and control, New York: McGraw-Hill, 1997.
7
[11] G. C. Paap, “Symmetrical components in the time domain and their applicatin to power network
calculations,” IEEE Transactions on Power Systems, vol. 15, pp. 522-528, May 2000.
[12] W. H. Kersting, “Radial distribution test feeders,” in Power Engineering Society Winter Meeting, 2001.
[13] “The Mathworks,” [Online]. Available: http://www.mathworks.com/.
[14] A. E. Emanuel, D. Cyganski, J. A. Orr , S. Shiller and E. M. Gulachenski, "High impedance fault arcing
on Sandy soil in 15 kV distribution feeders: contributions to the evaluation of the low frequency
spectrum," IEEE Transactions on Power Delivery, vol. 5, pp. 676-686, April 1990.
8
Baixar