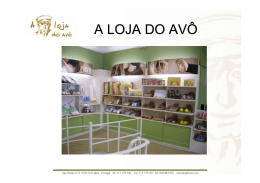
XXIX ENCONTRO NACIONAL DE ENGENHARIA DE PRODUÇÃO A Engenharia de Produção e o Desenvolvimento Sustentável: Integrando Tecnologia e Gestão. Salvador, BA, Brasil, 06 a 09 de outubro de 2009 5ª RODA: MÓDULO PARA SEMIAUTOMATIZAÇÃO DE BAIXO CUSTO E SIMPLES INSTALAÇÃO PARA CADEIRA DE RODAS MECÂNICA CONVENCIONAL Douglas Gameiro (UniA) [email protected] MARCELO DE CASTRO JOSE (UniA) [email protected] Thiago Pinheiro da Silva (UniA) [email protected] Valdir Gomes Ferraz (UniA) [email protected] Kátia Aparecida Abade (UniA) [email protected] Este trabalho foi idealizado ao observarmos a dificuldade encontrada pelos deficientes físicos, principalmente com paralisia parcial ou total nos membros inferiores, em se locomover. Além do problema sócioeconômico: o elevado custo de uma cadeira de rodas automática comum de mercado. O custo deste trabalho é relativamente baixo quando comparamos o mesmo aos similares em desenvolvimento na ordem de R$590,00, sendo 6% de uma cadeira automática comum e aos dispositivos similares em torno de 30% do valor total. Projetamos e construímos um dispositivo eletromecânico de transmissão e direcionamento, adaptável às cadeiras de rodas mecânicas convencionais, independente e de fácil adaptação aos usuários de cadeiras de rodas, com o que chamamos de 5a.Roda, por ser uma roda independente da cadeira original, sendo esta a tracionadora do conjunto. Suporta diferenças de superfícies de 20 graus de inclinação e pode ser instalado com apenas quatro furos na estrutura original da cadeira. O projeto inicial prevê a utilização de bateria veicular automotiva, mas para fins didáticos optamos por uma de no-break. Este dispositivo suporta os testes efetuados na cadeira de rodas com o dispositivo adaptado demonstraram a eficácia do projeto através de dados estatísticos de desempenho, quando comparados aos equipamentos existentes no mercado. Palavras-chaves: acessibilidade, automatização, cadeira de rodas XXIX ENCONTRO NACIONAL DE ENGENHARIA DE PRODUCAO A Engenharia de Produção e o Desenvolvimento Sustentável: Integrando Tecnologia e Gestão Salvador, BA, Brasil, 06 a 09 de outubro de 2009 1. Introdução 1.1 Justificativas São conhecidas por todos as dificuldades que os deficientes físicos encontram em nosso país. Simples direitos primordiais são desrespeitados, como o direito de ir e vir. Estes dados são facilmente observados em uma divulgação recente realizada pelo Instituto Brasileiro de Geografia e Estatística (IBGE), onde se constatou que aproximadamente 25 milhões de brasileiros são portadores de deficiência física. Esse número corresponde a 15% da população do país. Desse total, cerca de 4,3 milhões de pessoas apresentam algum tipo de incapacidade e 3,4 milhões têm grande dificuldade de locomoção. Os demais 17 milhões de deficientes contabilizados na estatística sofrem para realizar simples atividades do dia-a-dia. Observando, perceberemos não apenas os deficientes físicos, mas pessoas com dificuldades permanentes ou temporárias de acesso, como incapacidade temporária nos membros inferiores e mesmos os idosos. Fatos como estes, notórios em nosso cotidiano, foram os propulsores para o desenvolvimento do trabalho aqui relatado. Quando tratamos de deficiência física, diversos trabalhos são facilmente encontrados, mas percebemos que pouco se fala de acesso à facilidade gerada por equipamentos e a baixo custo. Percebemos então uma oportunidade, não só uma fatia de mercado, mas uma gama de pessoas que necessitam de acesso à tecnologia a baixo custo. Nosso projeto baseou-se no alto custo de uma cadeira de rodas automática, ou elétrica, como o mercado costuma tratar. Existem algumas frentes formadas com o intuito de baratear este produto, nacionalizando os componentes que se tornam os grandes vilões na formação final do produto em questão. Mas curioso é perceber que mesmo assim poderíamos diminuir ainda mais o valor do produto, bem como a manutenção de seus componentes, com o que denominamos “Semi-Automatização de Cadeira de Rodas Convencional”, realizada com a instalação de um dispositivo independente na própria cadeira do usuário, sem grandes modificações estruturais, além de ser removível e permitir a utilização da cadeira na forma original a qualquer momento, sem prejudicar seus componentes. Nosso trabalho basicamente consiste em utilizar um motor elétrico para o tracionamento de uma cadeira de rodas convencional, comum de mercado, automatizando-a com controle de velocidade e direcionamento manual, de simples acionamento. A pergunta a que insistentemente nos perguntávamos, a resposta foi: “Como alcançarmos nosso objetivo com um custo acessível?” Optamos então por uma solução prática e viável em todos os aspectos: A utilização dos componentes-chave de maior desgaste e complexidade de desenvolvimento e conseqüentemente maior custo como sendo produtos já existentes no mercado, como peças de bicicleta, por exemplo. Toda a tratativa em todas as etapas do desenvolvimento, bem como o resultado final dos destes, podem ser observados nas páginas que seguem. Esperamos que este projeto seja de utilidade às pessoas que realmente necessitam de equipamentos de apoio para acesso e locomoção no dia-a-dia. 1.2. Tipos de cadeiras similares no mercado Atualmente o mercado disponibiliza para os interessados em cadeiras de rodas, além das tradicionais cadeiras mecânicas, onde toda a força necessária para deslocamento do indivíduo é braçal, poucas opções de cadeira de rodas automáticas (BAXMANN, BRASILIT, BREHMMER, ICP, ORTOBRÁS, SMC, TOCLEVE, FREEDOM, 2008). 2 XXIX ENCONTRO NACIONAL DE ENGENHARIA DE PRODUCAO A Engenharia de Produção e o Desenvolvimento Sustentável: Integrando Tecnologia e Gestão Salvador, BA, Brasil, 06 a 09 de outubro de 2009 As cadeiras de rodas totalmente automáticas possuem um custo elevado para aquisição, com peças de reposição de alto custo por serem praticamente em sua totalidade importadas (RODRIGUES, 2008). Não há normas brasileiras para construção de cadeiras de rodas, o que dificulta ainda mais para que os usuários tenham um produto robusto para agüentar as necessidades de deslocamento do dia-a-dia. Encontramos no mercado produtos em desenvolvimento com as mesmas diretrizes de nosso trabalho, buscando a facilidade para os deficientes físicos a baixo custo e facilidade de instalação. a) Módulo que permite motorizar cadeiras de rodas – Unicamp: Este sistema consiste em um módulo independente que a cadeira de rodas é fixada em cima da mesma. Esta tem o funcionamento similar a de um carro de controle remoto, com sistema de tracionamento e direcionamento automáticos (GALLO, 2008). b) Kit de motorização de cadeira de rodas – UnB: Sistema similar a este trabalho, entretanto com controle total automatizado, da direção e do tracionamento. O agravante é o custo elevado e peças de reposição (INOVABRASIL, 2008). Uma cadeira de rodas básica incorpora um assento e uma parte traseira, duas rodas dianteiras pequenas (de rodízio) e duas rodas grandes, uma em cada lado, e um descanso do pé. A maioria das cadeiras de rodas são variações neste projeto básico, mas há muitos tipos, e frequentemente altamente customizadas para as necessidades do usuário individual. O tamanho do assento (largura e profundidade), a altura do assento ao assoalho, os descansos do pé, os descansos dianteiros de rodízio, os encostos ajustáveis, os controles, e muitas outras características podem ser customizadas, ou serem adicionadas a muitos modelos básicos. Vários acessórios opcionais estão disponíveis, como barras ou rodas antiderrapantes, correias de segurança, encostos ajustáveis, inclinação e/ou reclinação, sustentação extra para os membros ou a garganta, tanques do oxigênio, suportes da bebida, e protetores de roupas. Uma cadeira de rodas ereta é um que suporta o usuário em uma posição quase em pé. Podem ser usados como uma cadeira de roda e um frame ereto, permitindo que o usuário sente-se ou esteja-se no wheelchair enquanto desejam. Vão frequentemente de sentar-se a estar com uma bomba hidráulica ou uma assistência elétrica. Um scooter da mobilidade é um dispositivo motorizado da assistência similar a uma cadeira de rodas elétrica, mas com um steering “rebento” ou barra em vez do manche, e de poucas opções da sustentação médica. Os scooters da mobilidade estão disponíveis sem uma prescrição em alguns mercados, e escala dos modelos grandes, poderosos ao peso leve dobrar-se pretendidos para o curso. As cadeiras de rodas pediátricas também são mais um subconjunto disponível das cadeiras de rodas. O uso por atletas deficientes aerodinamizou as cadeiras de rodas para os esportes que requerem a velocidade e a agilidade, tal como o basquete, o rugby, o tênis e outras competições. Cada esporte tende a usar tipos específicos de cadeiras de rodas e, por este motivo, as cadeiras de rodas esportivas geralmente não são usadas diariamente: são cadeiras especificamente para o uso no esporte, frequentemente secundárias; embora alguns usuários prefiram as opções do modelo esporte para uso diário. As cadeiras para uso diário geralmente não dobram as rodas com um ângulo pronunciado, a fim de se aumentar a solidez; diferentemente das cadeiras para o esporte, onde a angulação entre as rodas fornece a estabilidade durante uma volta afiada, além de serem construídas com materiais compostos e de pouco peso. Outro “esporte” explorado são as opções recreacionais: são as cadeiras para todos os terrenos de movimentação quatro rodas, para uso ao ar livre cadeiras, na praia etc. 3 XXIX ENCONTRO NACIONAL DE ENGENHARIA DE PRODUCAO A Engenharia de Produção e o Desenvolvimento Sustentável: Integrando Tecnologia e Gestão Salvador, BA, Brasil, 06 a 09 de outubro de 2009 2.2. Componentes a) Motoredutor: Para o acionamento (motorização) da cadeira, tínhamos as seguintes opções: Motor elétrico, com uma transmissão ligando o motor ao eixo de movimentação da cadeira. Este sistema se tornou inviável, pois teríamos que usar um transformador de voltagem, uma vez que o motor elétrico é fornecido normalmente em 110/220V. O motor elétrico pode ser fornecido em 12V, porem tem o seu custo elevado. Motoredutor com uma transmissão externa, esta opção se mostrou a melhor opção, pois com essa construção conseguimos reduzir o tamanho do motoredutor e aumentar o torque para a movimentação da cadeira. O motoredutor foi especificado/ dimensionado pelo fabricante em função de dados que lhe fornecemos tais como: velocidade da cadeira, carga a transportar e relação de transmissão. Em função destes dados foi dimensionado o motoredutor modelo MR210VE, 240rpm (rotações por minuto), 12Vcc, 98W da empresa Motron (MOTRON, 2008). b) Pinhão, coroa e corrente: Para a movimentação da cadeira, tínhamos algumas opções tais como: Acionamento direto com o motoredutor fixado/acoplado direto no eixo de transmissão da roda, porém, para esta construção teríamos várias peças usinadas, o que elevaria muito o custo do projeto e um sistema de difícil manutenção. Transmissão por polia e correia sincronizada, este por sua vez era uma boa opção, pois a transmissão fica silenciosa e tem bom rendimento. Contudo caímos mais uma vez no fator custo/manutenção, as polias e a correia sincronizada tem seu custo muito alto e sua reposição em caso de manutenção, é muito difícil, pois são produtos muito específicos. Transmissão por pinhão, coroa e corrente, este sistema mostrou-se bem eficaz, uma vez que dimensionamos o passo da corrente, verificamos que podíamos usar acessórios de bicicletas, o que possibilita um baixo custo e uma fácil manutenção/reposição. Para dimensionar o passo da corrente que utilizamos no projeto, foi utilizado um gráfico do fabricante de corrente DAIDO (www.daido.com.br), este gráfico está em função da potência do motor e da rotação de saída do redutor. Com base nestes dados, determinou-se uma corrente com passo “p” de 1/2 polegada (12,7mm), que é a mesma utilizada em bicicletas. Desta forma optamos por utilizar estes itens de bicicletas, visando o baixo custo e a fácil manutenção. Com isto temos as seguintes especificações: c) corrente: p=1/2 polegada pinhão: p=1/2 polegada; z=13; diâmetro=53,5mm coroa: p=1/2 polegada; z=48; diâmetro=194,2mm. Roda: Com relação à roda de tração tínhamos a opção de usar rodas/rodízio comerciais das empresas NOVEX, SCHIOPPA, RODCAR, e outras, utilizados na indústria, mas como o objetivo deste trabalho é um projeto de baixo custo, está opção ficou inviável. Portanto, seguindo a mesma linha de raciocínio que usamos na escolha dos componentes, utilizamos uma roda aro 12 polegadas de bicicleta, para movimentar a cadeira, desta forma garantimos um sistema de fácil manutenção. d) Bateria e carregador: Para o projeto, definimos uma bateria de 12V e 36A, utilizada em automóveis, com esta temos uma autonomia de aproximadamente 4 horas de uso contínuo, se utilizado em condições de extrema exigência de torque e velocidade do motor. Com relação ao carregador, será utilizado o especificado pelo fabricante da bateria. 4 XXIX ENCONTRO NACIONAL DE ENGENHARIA DE PRODUCAO A Engenharia de Produção e o Desenvolvimento Sustentável: Integrando Tecnologia e Gestão Salvador, BA, Brasil, 06 a 09 de outubro de 2009 No protótipo, optamos por utilizar uma bateria de no-break de 7A e 12V, pelo fato de que utilizamos a cadeira apenas para testes, demonstrações e apresentações. Pois com a bateria original projetada, ficaria mais difícil apresentações rápidas, além de comprometer a utilização da mesma, uma vez que de acordo com o fabricante a mesma não pode permanecer períodos contínuos sem carga. 3. Metodologia 3.1. Sistema de direcionamento O desenvolvimento do sistema de direcionamento foi baseado nas mesmas diretrizes adotadas para o restante do projeto, onde buscamos o baixo custo atrelado à facilidade de fabricação e instalação do sistema da cadeira de rodas convencional. Inicialmente buscamos o desenvolvimento de um joystick, nos mesmos moldes das cadeiras de rodas automatizadas do mercado. Entretanto, entramos em confronto com nossas diretrizes, pois a dificuldade no desenvolvimento seria grande devido aos componentes de difícil fabricação e custos de fabricação e manutenção do sistema. Partimos para uma segunda opção, com um sistema de roda independente, que levaria o conjunto todo na direção determinada por um volante. Este sistema ainda inutilizaria o conjunto de rodas dianteiras originais da cadeira. Esta idéia também foi descartada quando analisamos a dificuldade que o usuário encontraria para seu posicionamento e utilização do conjunto, ainda mais agravado por ser um produto utilizado por pessoas de difícil locomoção. Chegamos então numa idéia que se adequava às nossas expectativas e necessidades, com um sistema de direcionamento que utiliza as rodas dianteiras existentes na cadeira original. O conceito baseia-se num sistema simples de varão de direção, fixada através do suporte de fixação do varão, ligado a uma barra de direção; fixada as duas rodas dianteiras da cadeira através dos garfos de direção. O único inconveniente encontrado foi o posicionamento da alavanca, formada na extremidade do varão da direção, pois quando utilizado pelo usuário para efetuar as manobras, o mesmo se mostrou ergonomicamente inadequado, gerando desconforto no manuseio. Ainda encontramos dificuldades para o acesso do usuário, pois a alavanca ficava em frente ao assento da cadeira. Analisamos os fatos e encontramos uma simples e viável modificação para solucionar e viabilizar o sistema adotado: uma manopla intercambiável, a qual o usuário tem a opção da articulação, auxiliando o acesso à cadeira. No desenvolvimento deste conjunto ainda buscamos mais uma facilidade, onde conseguimos um dispositivo que permite ser utilizado em ambos os lados da cadeira, seja para usuários destros ou canhotos, ou ainda pessoas com dificuldades de coordenação motora em um dos lados do corpo. Com o sistema de direcionamento acertado, buscamos facilidades e segurança ao usuário, onde adotamos um botão de segurança na manopla de direção, no qual o usuário não consegue acionar a cadeira de rodas sem uma das mãos neste local. Para o varão de direção, suporte de fixação do varão, barra de direção, e garfos de direção utilizamos tubo e chapa de aço como matéria-prima, e corte com serra manual, esmeril, solda, torneamento e furação como processos de fabricação. 3.2. Sistema de tracionamento No início do projeto várias idéias surgiram da forma que poderíamos conseguir um tracionamento dentro das expectativas e objetivos do trabalho. Primeiramente, idealizamos um sistema para tracionar as rodas traseiras originais da cadeira, sendo que este procedimento poderia ser realizado de algumas maneiras, as quais analisamos. A primeira solução sugerida foi um eixo de ligação das duas rodas traseiras, pois estas são independentes devido à utilização das mesmas com alternância de rotação para 5 XXIX ENCONTRO NACIONAL DE ENGENHARIA DE PRODUCAO A Engenharia de Produção e o Desenvolvimento Sustentável: Integrando Tecnologia e Gestão Salvador, BA, Brasil, 06 a 09 de outubro de 2009 direcionamento pelo usuário. Esta idéia se tornou inviável quando analisamos os problemas estruturais que enfrentaríamos, principalmente no que diz respeito a manter o máximo de originalidade da cadeira convencional, pois grandes modificações seriam necessárias, além de contradizer diretamente outra diretriz, a de ter fácil instalação. Outros problemas foram levantados, como a angulação existente entre as rodas, que nos obrigaria a desenvolver um sistema de diferencial para a compensação do mesmo; ou ainda o pouco espaço que teríamos para a montagem do restante do conjunto na parte inferior da cadeira. Estes problemas nos fizeram partir para outros caminhos. Partimos então para uma outra sugestão levantada pelo grupo, a de virarmos as rodas, colocando a roda externa utilizada para os usuários moverem a cadeira convencional para o lado interno da cadeira. Nestas rodas seriam aplicadas correntes com passos conhecido, para que conseguíssemos efetuar o tracionamento através delas, com um eixo ligado a um motor. Descartamos esta possibilidade pois, para a fixação de uma corrente na roda, poderia haver problemas de passo no fechamento, além de ser necessária a soldagem da mesma na roda. A solda também seria prejudicial, pois alteraria as características originais da cadeira e dificultaria a retirada do conjunto e utilização convencional da cadeira. Por fim chegamos a idéia utilizada, que consiste em um sistema independente da cadeira, facilmente instalado na cadeira de rodas convencional e de fácil retirada, caso necessário. A base é de uma roda sobressalente, instalada entre as rodas traseiras originais da cadeira, pouco atrás de seu eixo. A idéia consiste em um carro independente, formado com uma roda e pneu de bicicleta, acopladas à um pinhão. Este sub-conjunto é fixado à um garfo que é preso à uma bandeja que suporta os demais componentes, como bateria e motor. A bandeja por sua vez, possui outros componentes para o conjunto de tração, sendo uma coroa de bicicleta conectada à uma flange de fixação, todo este sistema ligado por uma corrente de bicicleta efetua a tração do conjunto. Esta roda sobressalente as rodas originais da cadeira de rodas convencional nomeou este trabalho, como sendo 5ª Roda. Para a fixação na cadeira utilizamos dois mancais fixados na cadeira e a bandeja com um eixo de inclinação ligado aos mancais, permitindo que o conjunto se incline para que o usuário possa subir e descer terrenos inclinados. Para a confecção dos componentes citados, utilizamos como matéria-prima: tubo, tarugo e chapa de aço e, corte com serra manual, esmeril, solda, torneamento e furação como processos de fabricação. 3.3. Sistema de alimentação A alimentação foi projetada para que o usuário tenha controle do sentido de deslocamento, frente e ré, além de velocidade do mesmo. Ainda há um sistema de segurança para que a cadeira só efetue deslocamento caso o usuário esteja com a mão em posição de utilização do varão de direção. Este sistema poka-yoke consiste em um botão de acionamento na extremidade da manopla de controle, para que usuário sempre esteja com a mão do comando de direção da manopla em posição, onde não é permitido que este botão seja travado para uso ininterrupto. 4. Desenvolvimento do projeto Após o desenvolvimento dos componentes, iniciamos o processo de montagem, o qual foi seguido de testes para avaliar a funcionalidade técnica e financeira de cada etapa. As análises dos testes sempre foram efetuadas baseando-se nas diretrizes primordiais do projeto, onde o baixo custo e a facilidade de instalação sempre foram os parâmetros para a análise. Entretanto, por se tratar de um primeiro protótipo, onde o objetivo é demonstrar a viabilidade 6 XXIX ENCONTRO NACIONAL DE ENGENHARIA DE PRODUCAO A Engenharia de Produção e o Desenvolvimento Sustentável: Integrando Tecnologia e Gestão Salvador, BA, Brasil, 06 a 09 de outubro de 2009 do projeto, alguns componentes foram superdimensionados para que não tivéssemos contratempos da aplicação. A seguir, teremos algumas etapas de testes efetuados para que analisássemos o desenvolvimento do projeto em função de cada um de seus sub-sistemas. 4.1. Testes de direção Com o projeto sendo seguido, o desenvolvimento dos componentes nos mostrou alguns problemas logo de início. Os garfos da direção, com a angulação projetada, não poderiam ser conseguidas, uma vez que as mesmas colidiam com a estrutura original da cadeira (vide Figura 1). Figura 1 – Garfo de direção do sistema de direcionamento Com a alteração dos ângulos do garfo, o problema foi resolvido e partimos para o teste seguinte, com a aplicação do varão de direção para testes de acionamento. Os testes mostraram que a ergonomia do varão de direção não favorecia a utilização do sistema, onde fomos obrigados a alterar drasticamente a idéia inicial, tirando a dobra da extremidade do varão de direção, colocando uma manopla no mesmo (vide Figura 2). Os testes mostraram ainda que há uma limitação para curvas em que o sistema chegue a uma angulação de aproximadamente 45° no sentido horário e anti-horário, se adotarmos o deslocamento longitudinal como referência, que permite ao usuário facilmente o deslocamento e manobras necessárias. Os suportes de fixação do varão necessitaram de alinhamento, uma vez que o curso do varão de direção se mostrou pesado devido a este problema, o que gerou um reposicionamento nos mesmos. Figura 2 – Manopla de direção do sistema de direcionamento 7 XXIX ENCONTRO NACIONAL DE ENGENHARIA DE PRODUCAO A Engenharia de Produção e o Desenvolvimento Sustentável: Integrando Tecnologia e Gestão Salvador, BA, Brasil, 06 a 09 de outubro de 2009 O sistema de manopla que permite a alteração de sentido da cadeira, quando em movimento é facilmente acionável, sem grandes esforços pelo usuário. Com a cadeira parada, requer um leve esforço a mais pelo usuário, mas nada que prejudique a utilização. Testes mostraram ainda que buchas de nylon aplicadas nos pontos de atrito entre os componentes, aliviam o esforço citado, entretanto não é necessária a aplicação, uma vez que o funcionamento sem as mesmas é totalmente viável (vide Figura 3). Figura 3 – Sistema de direcionamento 4.2. Testes de tração Logo no início desta fase, alguns problemas foram levantados, necessitando de rápidas soluções e ajustes. Primeiramente nos deparamos com um problema estrutural, que acarretaria em graves conseqüências ao usuário se o projeto fosse seguido a risca: a localização da bandeja da bateria. A modificação foi radical, onde reduzimos drasticamente o tamanho da mesma e a posição, onde conseguimos viabilizar um conjunto homogêneo com um tamanho proporcional à cadeira original, sem grandes agressões ao visual da cadeira e facilidade de transporte. Em seguida, efetuamos um pré-teste de aderência com o conjunto de tração montado, onde concluímos que o mesmo atenderia as necessidades. O teste foi efetuado sem que o sistema de tracionamento fosse totalmente concluído (vide Figura 4). 20o Figura 4 – Conjunto de tração montado 8 XXIX ENCONTRO NACIONAL DE ENGENHARIA DE PRODUCAO A Engenharia de Produção e o Desenvolvimento Sustentável: Integrando Tecnologia e Gestão Salvador, BA, Brasil, 06 a 09 de outubro de 2009 Partimos então para os testes dos mancais do eixo de inclinação, que se mostraram satisfatórios para a aplicação do sistema. Como teste final do sistema de tracionamento, efetuamos a verificação do conjunto com a bateria conectada diretamente ao motor. Onde o sistema demonstrou que seria necessária uma carga extra na bandeja da bateria para que o conjunto tivesse melhor eficiência no tracionamento, pois a bateria que utilizamos para teste não foi a dimensionada para o mesmo. Com a simulação do mesmo peso da bateria de projeto, verificamos uma melhora significativa, suficiente para sanar o problema em questão. Outro problema encontrado nos testes foi do pneu com pouca pressão, que sobrecarrega o sistema de tracionamento, acarretando em esforço excessivo no motor, consumo elevado da bateria e desgaste da transmissão, acarretando na redução da velocidade alcançada pela cadeira. Com a correta pressão no pneu, os problemas citados foram sanados. Pela característica construtiva do dispositivo de tracionamento, o mesmo suporta uma diferença brusca de angulação de aproximadamente 20°, sendo que para casos de inclinações gradativas, a mesma se comporta sem maiores problemas. No gráfico da Figura 5, podemos observar os dados experimentais apresentados para uma melhor análise. Concluímos que para uma perfeita utilização, na condição original do projeto piloto deve-se utilizar o mesmo com uma inclinação máxima de 15°, mas se porta bem com inclinações de até 20°. Figura 5 – Comportamento da cadeira de rodas projetada em planos inclinados Outro estudo efetuado foi do comportamento da cadeira de rodas após a instalação dos dispositivos de semi-automatização em um mesmo plano de inclinação com variações de carga. Este estudo visa verificarmos como será a variação de velocidade em relação ao peso do usuário. Os resultados podem ser observados no gráfico da Figura 6. Este estudo foi realizado com uma inclinação do plano de apoio de 0°. A carga utilizada foi adotada como a máxima suportada pela cadeira de rodas original, indicada pelo fabricante. 9 XXIX ENCONTRO NACIONAL DE ENGENHARIA DE PRODUCAO A Engenharia de Produção e o Desenvolvimento Sustentável: Integrando Tecnologia e Gestão Salvador, BA, Brasil, 06 a 09 de outubro de 2009 Figura 6 – Comportamento da cadeira de rodas projetada com variação de carga do usuário 4.3. Testes do sistema elétrico Os testes do sistema elétrico foram efetuados inicialmente na confecção da placa eletrônica, onde foram efetuadas verificações quanto ao seu funcionamento em bancada. O teste seguinte foi efetuado com o dispositivo montado a cadeira, onde pudemos comprovar a eficácia na prática. As funções testadas foram: a) Potenciômetro: Os testes mostraram que o potenciômetro funciona de forma eficaz, determinando a velocidade de deslocamento da cadeira de rodas de acordo com o ajuste efetuado pelo usuário. Sendo que, se o mesmo encontrar-se na posição de mínimo, o conjunto inteiro é paralisado. Verificamos ainda que com a utilização do potenciômetro, por características construtivas do mesmo, cerca de 10% da potência final do conjunto é perdida. b) Botão de reversão do sentido: O botão foi testado e mostrou-se satisfatório para a aplicação, entretanto é necessário que usuário pare o deslocamento do conjunto antes de reverter o sentido, senão é gerada uma sobrecarga no sistema, podendo acarretar em comprometimento do motor elétrico. c) Botão de acionamento: O botão foi aprovado nos testes, onde pudemos confirmar a utilização do mesmo pelo usuário. Devido à utilização constante deste botão, verificou-se fragilidade do mesmo, o que pode acarretar em problemas de manutenção ao usuário. d) Chicote: Para o funcionamento de todo o dispositivo, é fundamental o correto funcionamento deste item. Fizemos testes de ligação, com multímetro, verificando a corrente de cada etapa antes da montagem final, pois poderíamos ter comprometimento dos componentes se o mesmo estivesse com problemas. Entretanto verificamos a conformidade do projeto e o conjunto funcionou sem maiores problemas. e) Bateria: O projeto prevê a utilização de bateria veicular, devido ao fácil acesso e custo acessível. Entretanto para o desenvolvimento do protótipo utilizamos bateria de no-break, uma vez que para demonstrações e testes a mesma se mostrou eficaz. Realizamos análises com ambas baterias e, o quesito durabilidade foi aprovado em ambas. Os componentes e suas funções serão apresentados no capítulo 5. 5. Resultados e análises A seguir apresentamos a divisão dos custos por sub-sistema deste trabalho, sendo direcionamento, tracionamento e alimentação. Facilmente observamos no gráfico da Figura 7 que 70% dos custos no desenvolvimento do protótipo foi destinado ao sistema de tracionamento, o que se justifica pela aquisição do 10 XXIX ENCONTRO NACIONAL DE ENGENHARIA DE PRODUCAO A Engenharia de Produção e o Desenvolvimento Sustentável: Integrando Tecnologia e Gestão Salvador, BA, Brasil, 06 a 09 de outubro de 2009 motoredutor, que sozinho representa aproximadamente 46% de todo o investimento realizado. Seguido temos o sistema de alimentação, que pelos componentes eletrônicos necessários utiliza aproximadamente 27% de toda verba destinada ao trabalho. Por último temos o sistema de direciomamento, com o restante dos 3% do valor total. Figura 7 – Comparativo de gastos por sub-sistemas do projeto Podemos observar no gráfico da Figura 8 os dados estatísticos que demonstram a relação de custos quando comparamos nosso trabalho aos produtos existentes em mercado, seja as comuns automáticas de mercado ou as similares a este trabalho, com sistemas adaptáveis às cadeiras de rodas convencionais. Nosso Projeto: 5ª Roda Figura 8 – Comparativo de custos das cadeiras de rodas comercializadas 6. Conclusões Nosso trabalho originou-se do objetivo em construir um dispositivo de baixo custo que fosse de fácil instalação em cadeiras de rodas convencionais. No desenvolvimento do projeto diversos imprevistos surgiram, mas analisando os resultados apresentados concluímos a viabilidade do mesmo. Podemos verificar que os sistemas similares disponíveis no mercado possuem aproximadamente o dobro do custo deste trabalho e, se compararmos ainda com as cadeiras de rodas automáticas comuns de mercado, evidenciamos uma esmagadora diferença, de aproximadamente 2000% acima do trabalho aqui apresentado. 11 XXIX ENCONTRO NACIONAL DE ENGENHARIA DE PRODUCAO A Engenharia de Produção e o Desenvolvimento Sustentável: Integrando Tecnologia e Gestão Salvador, BA, Brasil, 06 a 09 de outubro de 2009 Os testes ainda nos mostraram que a autonomia da bateria projetada é suficiente para a utilização do equipamento no cotidiano, com cerca de 4 horas ininterruptas de utilização, bem como a inclinação da pista de rodagem da cadeira de rodas com aproximadamente 20°. Foi possível averiguar que alguns componentes podem ser reduzidos quanto ao dimensionamento, permitindo a colocação de materiais menos robustos, diminuindo assim o peso do sistema, o custo e aumentando a durabilidade em muitos locais, principalmente os locais de atrito entre superfícies, que permite a utilização de buchas de metais ou materiais auxiliares de sacrifício, diminuindo o custo de manutenção, o tempo para a realização da mesma e facilitando a troca dos componentes. Os testes de acoplagem do sistema desenvolvido na cadeira de rodas nos mostrou facilidade de implementação, onde evidenciamos que não são necessários amplos conhecimentos mecânicos para a adaptação do sistema à cadeira de rodas convencional, onde alcançamos um dos objetivos do projeto inicial, permitindo a rápida e fácil instalação. Conseguimos também, através dos testes práticos, verificar a eficiência dos sub-sistemas de direcionamento, responsável por determinar a direção do deslocamento da cadeira quando tracionada; o sistema de tracionamento, onde o usuário possui controle total sobre o sentido de rotação da roda motora, com o controle de velocidade, tendo ainda como ponto forte um botão de segurança, obrigando o usuário a sempre manter uma das mãos no controle da direção. Pelos testes e resultados neste trabalho apresentados, concluímos que é possível o desenvolvimento deste trabalho seriado, para pessoas que possuem dificuldade de locomoção e pouco poder aquisitivo. Esperamos que este seja de grande valia, seja desenvolvido na íntegra ou como base para o desenvolvimento de novos trabalhos. Referências BAXMANN. Fabricante de cadeira de rodas. www.baxmannjaguaribe.com.br/empresa.aspx. Consultado em setembro/2008. BRASILIT. Fabricante de cadeira de rodas. www.bralit.com.br. Consultado em setembro/2008. BREHMMER. Fabricante de cadeira de rodas. www.brehmmer.com.br. Consultado em agosto/2008. GALLO, CARMO NETTO. Módulo que permite motorizar cadeira de rodas. www.unicamp.br/unicamp/unicamp_hoje/ju/abril2006/ju318pag9b.html. Consultado em abril/2008. ICP. Fabricante de cadeira de rodas. www.icpcultural.com.br/site/index.php?option=com_content&task=view&id=19&Itemid=36. Consultado em setembro/2008. FREEDOM. Fabricante de cadeira de rodas e Manual do proprietário. www.freedom.ind.br. Consultado em abril/2008. MOTRON. Catálogo de Motoredutores. www.motron.com.br/motoredutor.htm. Consultado em março/2008. ORTOBRÁS. Fabricante de cadeira de rodas. www.ortobrasfabrica.com.br/produtos_chair.html. Consultado em setembro/2008. RODRIGUES, PEDRO BARBOSA; FIGUEIREDO, ARLINDO E SILVA. Guia de aquisição de cadeira de rodas adaptada em dimensões e capacidades motoras. Instituto Superior Técnico. Lisboa, Portugal; 2008. SMC. Fabricante de cadeira de rodas. www.smccare.com.br/produtos_mobilizacao.html . Consultado em agosto/2008. TOCLEVE. Fabricante de cadeira de rodas. www.tokleve.com.br . Consultado em setembro/2008. INOVABRASIL. UNB desenvolve equipamento para portadores de deficiência. http://inovabrasil.blogspot.com/2007/12/unb-desenvolve-equipamentos-para.html. Consultado em maio/2008. 12
Download