Capítulo 2
Movimento de Partículas em Campos
Elétricos e Magnéticos
Considere conhecidos os campos E e B, estudaremos a trajetória das partículas sob a
influência da força de Lorentz
F = q ( E + v × B)
(2.1)
2.1 Campo Elétrico Apenas
m
dv
= qE
dt
(2.2)
As órbitas dependem somente da razão q / m . E Uniforme ⇒ aceleração uniforme. Em
uma dimensão z, o campo Ez é trivial. Em múltiplas dimensões o problema é diretamente
análogo ao da partícula se movendo sob a ação da gravidade. Aceleração da gravidade
q
g ↔ E . As órbitas são parábolas. A energia é conservada levando em consideração a
m
Figura 2.1: Em um campo elétrico uniforme, as órbitas são parabólicas, análogo ao campo gravitacional.
energia potencial
EP = qφ
potencial elétrico
[Prova se necessária, embora a variação espacial de E,
m
dv
dφ
⋅ v = − q∇φ ⋅ v = − q
dt
dt
42
(2.3)
(2.4)
d ⎛1 2⎞
d
⎜ mv ⎟ = − ( qφ )
dt ⎝ 2
dt
⎠
(2.5)
1 2
mv + qφ = const.]
2
A particular ganha energia cinética qφ quando a partícula cai para uma posição de menor
potencial φ . Assim considere a aceleração e a análise eletrostática subseqüente das
partículas: Qual será o desvio apresentado pela partícula?
isto é,
Figura 2.2: Análise e esquema da aceleração eletrostática.
Depois do estágio de aceleração EC =
vx =
1 2
mvx = − qφs
2
−2qφs
m
(2.6)
Suponha que Ea , puramente na direção ẑ , seja o campo do analisador; a velocidade da
partícula é subseqüentemente constante. Dentro do analisador
m
dvz
q
q
x
= qEa ⇒ vz = Ea t = Ea
dt
m
m vx
(2.7)
então
z = ∫ vz dt =
q
t2 q
1 x2
Ea = Ea
m
2 m 2 vx2
Conseqüentemente a altura da cota na saída do analisador é
q
1 L2 q
1
m
z0 = Ea
= Ea L2
2
m 2 vx m 2 ( −2qφs )
43
(2.8)
=−
1 Ea 2
1 φ L2
L =+ a
4 φs
4 φs d
(2.9)
usando Ea = −φa / d . Note que este resultado é independente de q e m! Poderíamos ver isto
diretamente eliminando o tempo de nossas equações fundamentais, notando
d
d
=v
dt
dl
(= v ⋅∇)
se há energia inicial
com
v=
2 q (φ − φ s )
m
ou
v=
εs ⎞
2q ⎛
⎜ φ − φs + ⎟
m⎝
q⎠
(2.10)
ε s . Assim a equação do movimento é
m 2 q (φ − φ s ) d ⎛ 2 q (φ − φ s ) d ⎞
d
⎜
x ⎟ = 2 (φ − φs )
q
m
dl ⎜
m
dl ⎟
dl
⎝
⎠
(φ − φ s )
dx
= Ea = −∇φ (2.11)
dl
a qual é independente de q e de m. A trajetória da partícula, em um campo puramente
eletrostático, depende somente do campo (e da energia cinética inicial da partícula/q). Se a
energia cinética inicial é nula, não se pode deduzir nada sobre q, m.
2.2 Aceleração Eletrostática e Focagem
Feixes de partículas aceleradas e carregadas são extensamente usadas na ciência e em
aplicações cotidianas.
Exemplos:
Geração de raios-X através de feixes de elétrons (Médica, Industrial)
Microscópios Eletrônicos
Soldas. (Feixes de elétrons)
Implantação de íons de superfície
Ativação nuclear (feixe de íons)
Geração de neutrons
Televisores e Monitores de Vídeo
Mais largamente usado em aplicações que requerem < cem keV de energia para uso
aceleração eletrostática. Esquematicamente:
44
Figura 2.3: A obtenção de energia, a partir da aceleração eletrostática, é em princípio direta. A focagem do feixe e o transporte até o alvo
é crucial.
É simples adquirir a energia exigida. Assegure-se que a diferença potencial é a correta e
que as partículas estejam carregadas com a mesma carga: Energia (eV) ↔ Potencial V .
Pergunta mais interessante: Como focalizar o feixe? O que queremos dizer por focagem?
Figura 2.4: Analogia entre focagem ótica e de feixe de partículas.
O que se requer da “Lente”? Para que possamos focalizar em um único lugar requeremos
que o raio (caminho da partícula) desviado por uma lente “fina” seja sistemático.
Especificamente, todos os raios paralelos iniciais convergem em um ponto se a lente desvia
a direção dos raios por um ângulo θ , tal que
Figura 2.5: Requerimento para a focagem é que o desvio angular do raio deve ser uma função linear da distância ao eixo.
45
r = f tan θ
(2.12)
e para ângulos pequenos θ, r = − f θ . Esta dependência linear (θ = −r / f ) do desvio θ,
sobre a distância a partir do eixo, r, representa uma propriedade chave. Lentes eletrostáticas
admitiriam ter (por exemplo)
Er =
Ea
r
a
(2.13)
mas as lentes não podem ter sólidos carregados em seu meio porque o feixe têm que
atravessá-las, assim (inicialmente) ρ = 0 ⇒ ∇ ⋅ E = 0 .
1 ∂ ( rEr )
= 2 Ea / a ⇒ Ea = 0 ). Para
Conseqüentemente Er puro é impossível ( 0 = ∇ ⋅ E =
r ∂r
uma lente eixo-simétrica ( ∂ / ∂θ = −0 ) devemos ter ambos Er e Ez . Talvez o modo mais
simples para arrumar um Er apropriado é ter uma lacuna entre duas
Figura 2.6: Variação do potencial próximo a uma lacuna entre duas regiões de diferentes campos elétricos dá origem à focagem.
regiões de campos elétricos desiguais. Os contornos do potencial “se curvam para fora” na
direção da região de campo mais baixo: fornecendo Er .
46
Cálculo da distância focal para uma fenda Aceleração radial.
Figura 2.7: Coordenadas próximas a uma fenda.
dvr q
= Er
dt m
(2.14)
dvr 1 dvr q
=
= Er
dz vz dt m
(2.15)
Assim
Mas
∇⋅ E = 0 ⇒
1 ∂ ( rEr ) ∂Ez
+
=0
r ∂r
∂z
(2.16)
Próximo ao eixo, somente a parte linear de Er é importante, isto é
Er ( r , z )
r
∂Er
∂r
(2.17)
r =0
Assim
1 ∂
rEr
r ∂r
2
e assim
47
∂Er
∂r
(2.18)
r =0
∂Ez
=0
∂z
(2.19)
dvr
qr ∂Ez
=−
dz
2mvz ∂z
(2.20)
2
e podemos escrever Er
∂Er
∂r
+
r =0
1 ∂E
− r z . Então
2 ∂z
que pode ser integrado de forma aproximada, assumindo que as variações em r e vz possam
ser negligenciadas nas lentes para obter
−qr
2
Ez ]1
[
2mv z
(2.21)
−δ vr
+ qr
=
[ E z 2 − E z1 ]
vz
2mvz2
(2.22)
δ vr = [ vr ]inicial =
final
O desvio angular é então
θ=
e a distância focal é f = r / θ
2mvz2
4ε
=
f =
q ( E z 2 − E z 1 ) q ( E z 2 − E z1 )
(2.23)
Quando E1 é uma região aceleradora e E2 é zero ou pequeno, a lente é divergente. Isto
significa que dependendo apenas de um eletrodo extrator, para formar um feixe de íons,
obteremos um feixe divergente. Precisamos fazer mais focagem no decurso do fluxo: mais
eletrodos.
2.2.1 Lentes de Imersão
Dois tubos com potenciais diferentes entre si, separados por uma lacuna. Neste caso a
região de lacuna pode ser encarada como uma fenda mas com campos elétricos E1 e E2
iguais (zero) em ambos os lados. O efeito prévio é zero. Porém outros dois efeitos,
previamente negligenciados, fornecem focagem:
1. vz não é constante.
2. r não é constante.
Considere uma lacuna aceleradora: q (φ2 − φ1 ) < 0 .
48
Figura 2.8: Um único eletrodo de extração sempre fornece um feixe divergente.
Figura 2.9: Uma lente de imersão consiste de seções adjacentes de tubo a potenciais diferentes
Efeito (1) São convergidos íons na região 1, divergidos na região 2. Porém por causa da
aceleração na direção z, vz é maior na região 2. A ação divergente dura um tempo curto.
Conseqüentemente há uma convergência global.
Efeito (2) O campo elétrico Er é mais fraco quanto menor for r. Por causa do desvio, r é
menor na região de divergência. Conseqüentemente há uma convergência global.
Para uma lacuna desaceleradora você pode convencer-se facilmente que ambos os efeitos
ainda estão convergindo. [a simetria de reversão do tempo requer isto]. Podemos estimar a
distância focal como
1
f
3 q 2 ⎛ ∂φ ⎞
⎜ ⎟
16 ε 2 ∫ ⎝ ∂z ⎠
2
dz
(para focagem fraca)
(2.24)
r =0
mas cálculos numéricos fornecem os valores da figura 2.10 onde φ1 = ε q . Aqui ε
representa a energia na região 1. O efeito (2) acima, que o desvio da focagem ou da
desfocagem é mais fraco em pontos mais próximos do eixo, significa que isto é um
princípio geral onde, lentes alternadas de igual potência de convergência e divergência, dão
origem a um efeito líquido convergente. Podemos considerar este princípio como básico
49
Figura 2.10: Distância focal das lentes de imersão eletrostática. Dependência em energia por unidade de carga (
φ ) nas duas regiões, de
S. Humphries 1986
2.2.2 Focagem Gradiente Alternada
A idéia é abandonar a geometria cilindricamente simétrica para obter uma focagem mais
forte. Considere a configuração eletrostática com Ez = 0 e
Ex =
dEx
x
dx
com
dEx
= const.
dx
(2.25)
Desde que ∇ ⋅ E = 0 , temos que ter
dE
dEx dE y
dE
+
= 0 ⇒ y = const. ⇒ E y = − x y
dx
dx
dy
dx
Esta situação surge de um potencial
⎛ 1 dEx ⎞
⎟
⎝ 2 dx ⎠
φ = ( x2 − y 2 ) ⎜
(2.26)
(2.27)
assim as equipotenciais são hipérboles x 2 − y 2 = const . Se q dEx dx for negativo, então
este campo está convergindo na direção x, mas dE y dy = − dEx dx , assim, ao mesmo
tempo, o campo está divergindo na direção y. Usando seções alternadas de +ve e
−ve dEx dx , podemos obter um foco convergente líquido em ambas as direções x e y. Esta
aproximação alternada gradiente é muito importante para aceleradores de partículas de alta
50
energia, mas são utilizados geralmente campos magnéticos e não eletrostáticos. Assim
iremos analisar este caso posteriormente.
2.3 Campo Magnético Uniforme
m
dv
= q (v × B)
dt
(2.28)
Tome B na direção-z. Nunca existirá qualquer força na direção-z ⇒ vz = const . Dinâmica
perpendicular está separada.
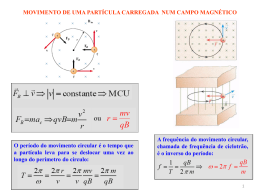
Figura 2.11: Órbita de uma partícula em um campo magnético uniforme.
2.3.1 Solução Força Bruta:
vx =
q
vy B
m
vy =
2
⎛ qB ⎞
⇒ vx = − ⎜
⎟ vx
⎝ m⎠
−q
vx B
m
(2.29)
2
⎛ qB ⎞
vy = − ⎜
⎟ vy
⎝ m⎠
(2.30)
qB
t
m
m
qB
y=v
t + y0
sin
qB
m
(2.31)
A solução
vx = v sin
qB
t
m
v y = v cos
m
qB
x = −v
t + x0
cos
qB
m
representa a equação de um círculo. O centro ( x0 , y0 ) e raio ( vm qB ) são determinados
pelas condições iniciais.
51
2.3.2 Solução “Física”
1. A força magnética não efetua trabalho sobre a partícula porque F ⊥ v .
Conseqüentemente o v total é constante.
2. Assim a força é constante, ⊥ a v . Dá origem a uma órbita circular.
3. A aceleração centrípeta fornece v 2 r = força/massa = q ( vB m ) , isto é, r = mv qB .
Este raio é chamado de raio de Larmor (ou de giro).
4. A freqüência de rotação v r = qB m ≡ Ω é chamada freqüência de “ciclotron”
(freqüência angular, s −1 , não ciclos/seg, Hz).
Quando somamos a constante vz , obtemos uma órbita helicoidal. A freqüência de ciclotron
Ω = qB m depende somente do caráter da partícula q, m e do módulo de B v e não depende
de v (não relativístico, veja aparte). Raio de Larmor r = mv qB depende do momento da
partícula mv . Todas as partículas (não relativísticas) com o mesmo q m possuem o mesmo
Ω . Partículas com diferentes energias possuem diferentes r . Esta variação pode ser usada
para fazer espectrômetros de momento.
2.3.3 Parte Relativística.
A dinâmica relativística pode ser escrita como
d
p = q ([ E + ] v × B )
dt
(2.32)
onde o momento relativístico é
p = mv =
m0v
1 − v2 c2
(2.33)
A massa m é aumentada pelo fator
⎛ v2 ⎞
γ = ⎜1 − 2 ⎟
⎝ c ⎠
−1 2
(2.34)
relativo à massa de repouso m0 . Desde que para E = 0 a velocidade v = const , γ é
também constante, e assim o é m. Então a dinâmica de uma partícula em um campo
puramente magnético pode ser calculada como se fosse não relativística:
m dv dt = q ( v × B ) , exceto pelo fato da partícula possuir uma massa maior, por um fator γ ,
que a sua massa de repouso.
52
2.3.4 Espectrômetro de Momento
Partículas que passam verticalmente através de uma fenda tomam caminhos diferentes,
dependendo de mv q . Medindo onde a partícula atinge plano de detecção,
Figura 2.12: Partículas com momentos diferentes colidem com o plano de detecção em posições diferentes.
medimos seu momento q :
2
mv
=x
qB
:
mv Bx
=
2
q
(2.35)
Por que construir o plano de detecção de um diâmetro? Porque a posição de detecção é
menos sensível à direção da velocidade. Esta é uma forma de focagem magnética. Claro
que não precisamos fazer uma detecção total de 360o, assim podemos reduzir o tamanho do
analisador.
Figura 2.13: (a) A focagem é obtida para diferentes ângulos de entrada usando 180 graus de órbita.
(b) A outra metade da órbita é redundante.
Ainda assim, pode ser inoportuno produzir um campo B uniforme de intensidade suficiente,
por sobre uma área grande o bastante, se impulso de partícula for grande.
53
2.3.5 Devaneios Históricos (J.J. Thomson 1897)
“Raios catódicos”: Como observar a sua carga e massa?
Deflexão Eletrostática
Fornece-nos somente a sua energia q = ε q e não temos um método independente para
medir ε , visto que a mesma quantidade ε q é exatamente igual ao potencial acelerador,
que é a grandeza que medimos.
Deflexão Magnética
O raio de curvature é
r=
mv
qB
(2.36)
deste modo, a combinação da eletrostática e eletromagnética fornecem
1
2
mv 2
= M1
q
e
mv
= M2
q
(2.37)
Portanto
2M 1 q
=
M 22 m
(2.38)
Podemos medir a razão Carga Massa . A fim de completar a tarefa, foi necessária uma
medida independente de q (ou de m).Millikan (1911-13). [Recentemente Townsend fez um
experimento no laboratório J. J. Thomson, para medir a carga q a qual estava dentro de um
fator de correção ∼ 2 .]
2.3.6 Espectrômetro Prático
O espectro de ions rápidos, em pesquisas sobre fusão, é freqüêntemente obtido pela análise
eletrostática e eletromagnética simultânea, E paralelo a B. Esta análise permite a
determinação de ε q e q m ⇒ velocidade da partícula [ε = mv 2] . Assim, por exemplo,
deuterons e prótons podem ser distinguidos.
54
Figura 2.14: Para E paralelo a B, o analisador produz na saída, uma trajetória parabólica em função da velocidade de entrada. As
trajetórias são diferentes para diferentes valores de q/m.
Porém, He4 e D2 possuem o mesmo q m assim não podemos distinguir seus espectros com
base nas órbitas dos íons.
2.4 Aceleradores Dinâmicos
Além dos aceleradores eletrostáticos, há vários tipos diferentes de aceleradores baseados
em campos variáveis no tempo. Com a exceção do Betatron, todos estes são baseados no
princípio geral de organização para uma ressonância entre a partícula e os campos
oscilantes, tal que a energia é dada continuamente à partícula. Exemplo simples
Figura 2.15: Seqüência de eletrodos com potenciais dinamicamente variáveis, produz aceleração contínua. São indicados os valores para
três tomadas de tempo.
A partícula é acelerada através da sucessão de 3 eletrodos às vezes (1) (2) (3). O potencial
do eletrodo é elevado do negativo para + ve enquanto a partícula estiver dentro do eletrodo.
Assim a cada intervalo a partícula sofre uma aceleração Ez . Pode ser pensado como colinas
de potencial em movimento sucessivo: “Ondas” de potencial que se propagam numa
mesma velocidade como partícula, assim está continuamente acelerado. O ciclotron foi o
acelerador mais difundido na história recente, baseado neste princípio.
55
Figura 2.16: Potenciais oscilantes dão origem a uma propagação de ondas
Figura 2.17: Esquema de um acelerador cilotron.
2.4.1 Ciclotron
Tire proveito da freqüência de órbita em um campo uniforme B Ω = qB m . Aplique um
potencial oscilante aos pólos elétricos, nesta freqüência. A cada intervalo de tempo a
partícula cruza a abertura (duas vezes/volta) e sofre a ação de um campo elétrico
acelerador. Freqüência de Ressonância
f =
Ω
qB
=
= 1,52 ×107 B Hz
2π m2π
(2.39)
15, 2Mhz/T para prótons. Se o raio do imã é R, a particular deixa o acelerador quando seu
raio de Larmor for igual a R.
mv
1
1 q2 2 2
= R ⇒ mv 2 =
B R
2
2m
qB
Se o ferro é usado para os pólos magnéticos, então
56
(2.40)
B < 2T
(onde satura).
Conseqüentemente é requerido um acelerador maior para energias mais altas ε ∝ R 2 . [Mas
armazenou energia no ímã ∝ R 2 → R3 ].
2.4.2 Limitações da Aceleração do Ciclotron: Relatividade
(
Aumento de massa ∝ 1 − v 2 c 2
)
− 12
quebra ressonância, restringindo a energia máxima para
∼ 25MeV (prótons). Melhoria: freqüência de varredura do oscilador (descendente).
“Sincrociclotron” permitiu energias até ∼ 500MeV mas com fluxo reduzido.
Alternativamente: Aumenta B com o raio. Leva para divergência de órbita paralela a B.
Retribui correspondentemente com campo azimutalmente variável para focagem AVFciclotron . Vantagem feixe contínuo.
2.4.3
Sincrotron
Varia a freqüência e campo no tempo para manter o feixe em ressonância, com raio
constante. Física de alta energia (para 800GeV ).
2.4.4
Aceleradores Lineares
Evitam limitações de radiação sincrotron de elétron. Apresentam 2 tipos principais. (1)
indução (2) RF (linacs) com diferentes prós e contras. (RF para elétrons de energia mais
altas). Aceleração de elétron: v = c problemas diferentes de íon
2.5 Focagem
Alternado)
de
Quadrupolo
Magnético
(Gradiente
Focagem magnética é preferida para partículas de alta energia. Por que? Sua força é mais
poderosa.
Força magnética em uma partícula relativística qcB .
Força elétrica em uma partícula relativística qE .
Exemplo: B = 2T ⇒ cB = 6 × 108 mesma força como um campo elétrico de intensidade
6 ×108 V/m = 0,6MV/mm ! Porém a força magnética é perpendicular a B assim uma lente
eixo-simétrica gostaria de ter um campo B puramente azimutal B = θˆB . Porém isto
θ
requereria uma corrente
57
Figura 2.18: Ideal impossível para a focagem magnética: campo magnético puramente azimutal.
onde se encontra o feixe:
∫ B ⋅ dl = µ I
(2.41)
0
Lente magnética eixo-simétrica é impossível. Porém podemos focalizar em uma direção
cartesiana ( x, y ) de cada vez. Então use o fato de que sucessivas focagens e desfocagens
combinadas fornecem um foco líquido.
2.5.1 Matemática Preliminar
Considere ∂ ∂z = 0 campo puramente transversal (aproximado) Bx , By . Isto pode ser
representado por B = ∇ × A com A = zˆA assim ∇ × A = ∇ × ( zˆA ) = − zˆ∇ × A (desde que
∇ × zˆ = 0 ). Na região de vácuo temos j = 0 (nenhuma corrente), assim
0 = ∇ × B = ∇ × ( − zˆ × ∇A ) = − zˆ∇ 2 A + ( zˆ ⋅∇ ) ∇A
(2.42)
=0
isto é, ∇ 2 A = 0 . A satisfaz a equação de Laplace. Note então que as soluções de problemas
eletrostáticos, ∇ 2φ = 0 também são soluções de problemas de magnetostática em (2-d) no
vácuo. Aplicam-se as mesmas técnicas de solução.
2.5.2 Expansão Multipolar
O potencial pode ser expandido em algum ponto do espaço por meio da expansão de
Taylor. Escolha a origem no ponto de expansão e use as coordenadas ( r ,θ ) , x = r cos θ ,
y = r sin θ .
1 ∂ ∂A 1 ∂ 2 A
∇ A=
r
+
=0
r ∂r ∂r r 2 ∂θ 2
2
58
(2.43)
Considere soluções da forma A = u ( r ) ⋅ w ( r ) . Estas requerem
d 2w
= −const. × w
dθ 2
(2.44)
d du
r
= const. × u
dr dr
(2.45)
e
r
Conseqüentemente as soluções w são senos e cosenos
w = cos nθ
ou
sin nθ
(2.46)
onde n 2 é a constante presente na equação prévia e n inteiro a fim de satisfazer a
periodicidade.
Correspondentemente
u = r n ou ln r , r − n
Estas soluções são chamadas “harmônicos cilíndricos” ou multipolos (cilíndricos):
1
(2.47)
ln r
r n cos nθ
r − n cos nθ
r n sin nθ
r − n sin nθ
(2.48)
Se não houverem fontes presentes em nosso ponto de expansão (nenhuma corrente), então a
coluna da direita não se aplica porque não é permitida nenhuma singularidade em r = 0 . Os
multipolos restantes são
1
r cos θ ( = x )
Constante irrelevante para o potencial
Campo uniforme, ∇A ∝ xˆ
(
)
r 2 cos 2θ = r 2 cos 2 θ − sin 2 θ = x 2 − y 2
Campo não uniforme
Ordens mais altas
Desprezadas
A solução de segunda ordem, x 2 − y 2 é denominada campo de “quadrupolo” (embora seja
uma designação incorreta). [Semelhantemente r 3 cos3θ “hexapolo”, r 4 cos θ , “octupolo”].
Nós já tratamos com este potencial no caso elétrico.
(
)
∇A = ∇ x 2 − y 2 = 2 xxˆ − 2 yyˆ
Assim
59
(2.49)
− zˆ × ∇A = −2 xyˆ − 2 yxˆ
(2.50)
Força sobre uma carga em movimento longitudinal:
F = qv × B = qv × ( ∇ × A )
(2.51)
= qv × ( zˆ × ∇A ) = − q ( v ⋅ zˆ ) ∇A ≡ − qvz∇A
(2.52)
A força de quadrupolo magnético é identica à força de “quadrupolo” elétrico, substituindo
φ ↔ Avz
(2.53)
Por conseguinte, focagem na direção x ⇒ desfocagem na direção y, mas gradientes
alternados dão focagem líquida. Esta é base de toda a “focagem forte”.
2.6 Força sobre distribuição de densidade de corrente
Nós consideramos a força de Lorentz
F = q( E + v × B)
(2.54)
como uma lei fundamental. Porém as forças são geralmente medidas em sistemas de
engenharia pela interação de fios ou barras condutoras com campos B. Historicamente é
claro que a eletricidade e o magnetismo estavam baseados nestes medidas. Uma corrente (I)
é um fluxo de cargas: Coulombs/s ≡ Ampère . A densidade de corrente j é o fluxo de cargas
por unidade de área A/m2. O carga é levada através das partículas:
∑
j=
ni vi qi
(2.55)
espécies i
Conseqüentemente, a força total sobre a corrente de portadores por unidade de volume é
F = ∑ ni qi ( vi × B ) = j × B
(2.56)
i
Também, para um fio fino percorrido pela corrente I, se sua área transversal for Ω, a
densidade de corrente média pela seção é
j=
I
Ω
(2.57)
60
Volume por unidade de comprimento é Ω. E a
força/unidade de comprimento = j × BΩ = I × B perpendicular ao fio.
2.6.1 Forças sobre dipolos
Nós vimos que o campo de uma distribuição localizada de correntes, longe das correntes,
pode ser aproximado como um dipolo. De forma semelhante, as forças sobre uma corrente
localizada, por um campo magnético externo que varia lentamente na região da corrente,
pode ser expressa em termos de um dipolo magnético. [O mesmo critério é válido em
eletrostática com um dipolo elétrico].
Força total
F = ∫ j × Bd 3 x′
(2.58)
onde B é um campo externo que varia lentamente e assim pode ser aproximado por
B ( x′ ) = B0 + ( x′ ⋅∇ ) B
(2.59)
onde o tensor ∇B ( ∂B j ∂xi ) é simplesmente uma constante (matriz). Conseqüentemente
F = ∫ ⎡⎣ j × B0 + j × ( x′ ⋅∇B ) ⎤⎦ d 3 x′
=
( ∫ jd x′) × B + ∫ j × ( x′ ⋅∇B ) d x′
3
3
0
(2.60)
O primeiro termo integral é zero e o segundo é transformado pela nossa identidade prévia,
que pode ser escrito como
x × ∫ ( x′ × j ) d 3 x′ = 2 x ⋅ ∫ jx′d 3 x′ = −2 x ⋅ ∫ x′jd 3 x′
(2.61)
para qualquer x. Use a quantidade ∇B para x (isto é, xi ↔ ∂B j ∂xi ) fornecendo
1
( x′ × j )d 3 x × ∇B = m × ∇B = ∫ j ( x′ ⋅∇ )Bd 3 x
∫
2
(2.62)
Esta identidade tensorial é então contraída por um produto vetorial “interno” para dar a
identidade vetorial
( m × ∇ ) × B = ∫ j × ⎡⎣( x′ ⋅∇ ) B ⎤⎦ d 3 x
61
(2.63)
Assim
F = ( m × ∇ ) × B = ∇ ( m ⋅ B ) − m (∇ ⋅ B )
(2.64)
(lembre-se que ∇ opera somente sobre B e não em m). Esta é a força sobre um dipolo:
F = ∇(m ⋅ B)
(2.65)
Torque Total (Momento de força)
é
M = ∫ x′ × ( j × B ) d 3 x′
(2.66)
= ∫ j ( x′ ⋅ B ) − B ( x′ ⋅ j ) d 3 x′
(2.67)
aqui B é (para a ordem mais baixa) independente de x′ : Assim o segundo termo B0 é zero
desde que
∫ x ′ ⋅ jd
3
x′ = ∫
{ (
)
}
1
2
2
∇ ⋅ x′ j − x′ ∇ ⋅ j d 3 x′ = 0
2
(2.68)
O primeiro termo é da forma padrão da nossa identidade.
1
M = B ⋅ ∫ x′jd 3 x′ = − B × ∫ ( x′ × j ) d 3 x′
2
(2.69)
M = m×B
(2.70)
Momento sobre o dipolo
Figura 2.19: Circuito elementar para o cálculo da força magnética.
2.6.2 Força sobre um Circuito Elementar de Momento Magnético
Considere um circuito retangular plano percorrido pela corrente I, e que possui área
elementar dxdy = dA . Considere dA como um vetor que aponta na direção z. F é força
62
sobre esta corrente,imersa em um campo B ( r ) , tal que
Fx = Idy ⎡⎣ Bz ( x + dx ) − Bz ( x ) ⎤⎦ = Idydx
∂Bz
∂x
(2.71)
Fy = − Idx ⎡⎣ Bz ( y + dy ) − Bz ( y ) ⎤⎦ = Idydx
∂Bz
∂y
(2.72)
Fz = − Idx ⎡⎣ Bz ( y + dy ) − Bz ( y ) ⎤⎦ − Idy ⎡⎣ Bz ( x + dx ) − Bz ( x ) ⎤⎦
⎡ ∂B ∂B ⎤
∂B
= − Idxdy ⎢ x + y ⎥ = Idydx z
∂y ⎦
∂z
⎣ ∂x
(2.73)
(usando ∇ ⋅ B = 0 ). Conseqüentemente, resumindo: F = Idydx∇Bz . Agora definimos
m = IdA = Idydxzˆ e o tomemos constante. Então claramente a força pode ser escrita como
F = ∇(B ⋅m)
(2.74)
ou exatamente ( ∇B ) ⋅ m .
Figura 2.20: Momento sobre um imã de barra em um campo uniforme
Figura 2.21: O momento magnético de uma imã na forma de barra é atraído ou repelido na direção da região de campo
mais intenso, dependendo de sua orientação.
63
2.6.3 Exemplo
Ímã de barra pequeno: arquétipo de dipolo. Em um campo uniforme B, o imã sofre apenas
um torque que o alinha com B. Em um campo uniforme, não há nenhuma força líquida.
Campo não uniforme: Se o ímã atinge sua direção natural de descanso, m paralelo a B, a
força é
F = m∇ B
(2.75)
Um ímã de barra é atraído para a região de campo mais intenso. Alternativamente se m é
anti paralelo a B, o ímã aponta para o outro sentido
F = −m∇ B
repelido de B alto
(2.76)
O mesmo seria verdade para um circuito elementar de dipolo. É atraído/repelido de acordo
se ele age para aumentar ou diminuir B localmente. Uma partícula carregada que se move
em sua órbita de Larmor, é sempre diamagnética: repelida de B alto
2.6.4 Intuição
Há algo ligeiramente não intuitivo entre o comportamento “natural” de um circuito
elementar de fio e a órbita de uma partícula, considerada como semelhante a este circuito
elementar. Suas correntes fluem em direções opostas quando o fio estiver em sua orientação
estável. A razão é que a força do fio, o sustenta contra a força de expansão magnética para
fora, enquanto a partícula precisa de uma força para dentro que causa a aceleração
centrípeta.
Figura 2.22: Circuito elementar atuando da mesma forma que um dipolo experimenta uma força em um campo magnético não uniforme.
64
Figura 2.23: Diferença entre uma espira circular e uma partícula orbitando em sua orientação “natural”.
2.6.5 Momento Angular
Se a corrente local é composta de partículas que têm uma relação constante entre a carga e
massa: q m dizemos (por contingência de notação que m é o momento magnético). Então
o momento angular é L = ∑ i M i xi × v e momento magnético é m = 1 2 ∑ i qi xi × vi . Assim
m=
q
L
2M
“Clássico”(2.77)
Isto
seria
verdade
também
para
um
corpo
contínuo
com
(densidade de carga) (densidade de massa) ( ρ ρ m ) constante. Partículas elementares, por
exemplo elétrons etc., tem “spin” com momentos m, L. Entretanto elas não obedecem a
equação acima. Ao invés
m=g
q
L
2M
(2.78)
com o fator g Landé ( 2 para elétrons). Isto é atribuído a efeitos quânticos e relativísticos.
Porém o valor “clássico” poderia não ocorrer se ( ρ ρ m ) não fosse constante. Assim não
deveríamos ficar surpresos que g não é exatamente 1 para o spin das partículas.
2.6.6 Precessão de um Dipolo Magnético (formado de uma partícula
carregada)
O resultado de um torque m × B é uma mudança no momento angular. Desde que
m = gLq 2 M temos
dL
q
= m×B = g
( L× B)
dt
2M
65
(2.79)
Figura 2.24: Precessão do momento angular L e do momento magnético m alinhado sobre o campo magnético.
Esta é a equação de um círculo ao redor de B. [Compare com equação da órbita
dv dt = q m v × B ]. A direção de L precessa como um “pião” inclinado ao redor da direção
de B com uma freqüência
ω=g
qB
2M
(2.80)
Para um elétron ( g = 2 ) ela é igual à freqüência de ciclotron. Para prótons g = 2 × 2,79
[Escrito assim porque o spin é 1 2 ]. Para nêutrons g = 2 × ( −1,93) .
A freqüência de precessão é assim
f =
ωelétron
= ( 28GHz ) × ( B / Tesla )
2π
(2.81)
ωpróton
= ( 43GHz ) × ( B / Tesla )
2π
(2.82)
=
Esta é a base (clássica) da Ressonância Nuclear Magnética, mas é claro que precisamos
realmente da Mecânica Quântica (MQ).
66
Baixar