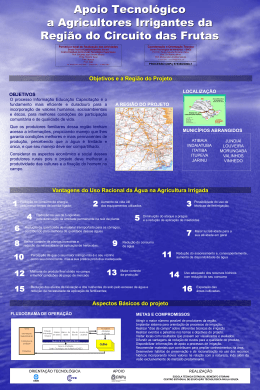
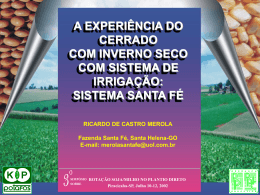
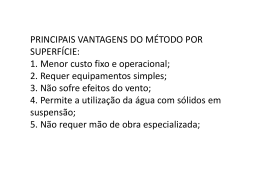
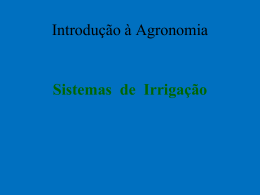
SISTEMA DE IRRIGAÇÃO INTELIGENTE DIONISIO S. PEREIRA, FAETE J. FILHO, JOÃO O. P. PINTO, TEODORICO A. SOBRINHO Departamento de Engenharia Elétrica, Universidade Federal de Mato Grosso do Sul Cidade Universitária, s/n Caixa Postal 549 CEP: 79070-900 Campo Grande, MS - Brasil E-mails: [email protected] [email protected] [email protected] [email protected] Abstract⎯ This work presents an intelligent irrigation system that can reduce the water and electric energy consumption, essential products in irrigation systems. In order to reach this objective, it was applied two artificial intelligence techniques: artificial neural networks and genetic algorithms. The artificial neural networks is used to estimate the reference evapotranspiration coefficient for correct irrigation management. On the other hand, the genetic algorithm is used to determine the command of the inverter/motor/pump system that minimizes the cost with electric energy, considering the electric and mechanical losses, and the billing rules. A complete irrigation system was modeled and simulated and the results were excellent, showing the potentials for application of these techniques in precision agriculture. Keywords⎯ intelligent irrigation systems, artificial neural networks, genetic algorithms, irrigation management, precision irrigation, energy efficiency. Resumo⎯ Este trabalho apresenta um sistema de irrigação inteligente capaz de diminuir o consumo de energia elétrica e água, insumos essenciais à agricultura irrigada. Para isto, foram aplicadas duas técnicas de inteligência artificial: Redes Neurais Artificiais e Algoritmos Genéticos. A rede neural é utilizada para a estimação da evapotranspiração de referência para a determinação do correto manejo da irrigação. Por outro lado, o algoritmo genético é utilizado na determinação do comando do sistema inversor/motor/bomba que minimize os custos com energia elétrica, considerando as perdas elétricas e mecânicas do sistema e as regras de tarifação. Um sistema completo de irrigação foi modelado e simulado e os resultados foram excelentes, demonstrando o potencial de aplicação destas técnicas na agricultura de precisão. Palavras-chave⎯ sistemas inteligentes de irrigação, redes neurais artificiais, algoritmo genético, manejo da irrigação, irrigação de precisão, eficiência energética. 1 Introdução A prática correta da irrigação é essencial para que sejam colhidos bons resultados na agricultura. Um sistema de irrigação tem a função de fornecer água à cultura quando os recursos naturais não forem suficientes para garantir seu bom desenvolvimento. Portanto, o correto manejo da irrigação gera aumento na produtividade e lucratividade. A determinação do volume de água a ser irrigado é feita através do cálculo do balanço hídrico (Bernardo, 1995). Isto se dá pela soma de todas as perdas menos os ganhos de água na região de cultivo em questão. As perdas são representadas principalmente pela quantidade de água que é evaporada no solo e transpirada pela planta, o que é chamada evapotranspiração. O ganho de água normalmente considerado é a precipitação efetiva. O produto entre o coeficiente de evapotranspiração de referência (Eto) e um coeficiente de cultivo (kc) tem como resultado a evapotranspiração da cultura ou efetiva (Ec ou Eef, respectivamente), ou seja, o quanto as plantas realmente perderam de água. A estimativa da Eto permite o cálculo da Ec para qualquer da cultura, pois para cada uma, seu respectivo kc pode ser encontrado na vasta literatura disponível (Bernardo, 1995; Gomes, 1999; Jensem, 1990). Deste modo, a Eto é o fator de incerteza no momento do cálculo do balanço hídrico. Atualmente tem sido dada grande ênfase aos métodos indiretos que são baseados na estimação da Eto através de dados climáticos e modelos matemáticos empíricos (Gomes, 1999). A razão para isto é que eles agilizam e tornam mais barato o manejo da irrigação se comparado aos métodos diretos. Dentre os diversos métodos de estimativa de evapotranspiração, o Comitê Técnico ASCE (American Society of Civil Engineers) de Evapotranspiração na Irrigação e Hidrologia padronizou o método Penman-Monteith no ano 2000. Este método tem sido amplamente recomendado, devido à apresentação de estimativas confiáveis da Eto para culturas de referência (grama e alfafa), com valores bem próximos aos medidos experimentalmente através de lisímetros (Allen, 2000). Uma Rede Neural Artificial (RNA) tem a propensão natural para armazenar conhecimento contido em dados e torná-lo disponível para o uso através de um processo de aprendizagem (Haykin, 2000). Esta técnica permite fazer o mapeamento de um conjunto de entradas a um conjunto de saídas sem a necessidade de um modelo matemático (Kosko, 1992). Tal mapeamento é obtido por um processo chamado de treinamento supervisionado, o qual utiliza um conjunto de dados disponíveis (Dayhoff, 1990). Portanto, o uso das RNAs é promissor para a estimação precisa da Eto, isto, devido a sua grande capacidade de mapeamento. Um dos grandes consumidores de energia elétrica atualmente é o conjunto motor/bomba de sistemas de irrigação. Geralmente, o controle destes sistemas é do tipo on/off, que tem baixo rendimento no uso da energia elétrica (Amigo, 2000). No entanto, o advento do inversor de freqüência, possibilitou um controle mais eficiente de motores do que do modo liga/desliga (Bose, 2001). O seu uso permite um controle contínuo da amplitude e da freqüência da tensão de alimentação do motor, resultando em um controle preciso da velocidade do mesmo segundo uma lei de controle desejada. Fundamentalmente, uma lei de controle define qual é a entrada necessária para se obter uma saída desejada. No problema em análise isto significa: dado um volume de água por unidade de área a ser irrigado em um período de tempo, a lei de controle definirá uma amplitude e uma freqüência para a tensão de alimentação do motor, que levará o motor a operar em uma determinada velocidade. A bomba, sendo acionada nesta velocidade, fornecerá água ao dispositivo de distribuição (aspersores ou gotejadores) a uma pressão desejada. Neste processo, a garantia da eficiência no consumo de energia elétrica depende da definição dos valores de amplitude e freqüência da tensão (Oliver, 1998), levando em consideração o ponto de operação ótimo do sistema motor/bomba e o volume de água por unidade de área a ser irrigado em um período de tempo. No entanto, não existe uma função que relacione estas variáveis, sendo que a mesma é altamente complexa e não-linear. Como resultado disso, a otimização do consumo de energia por este sistema não pode ser feita via técnicas de otimização convencionais. Portanto, o uso de Algoritmo Genético (AG), que é uma técnica de otimização não-linear não baseada no gradiente, é promissor na otimização do processo de acionamento do sistema inversor/motor/bomba para minimizar o consumo de energia elétrica. Principalmente devido sua vantagem de não fazer nenhuma restrição quanto à função a ser otimizada, ou seja, maximizada ou minimizada (Goldberg, 1989). Portanto, neste trabalho foi desenvolvido e avaliado um sistema de controle composto por uma RNA e um AG que, em conjunto, comandam um sistema de irrigação visando a economia de água e do custo com energia elétrica. 2 Sistema de Irrigação Inteligente 2.1 Descrição geral do Sistema de Irrigação Inteligente A Figura 1 mostra o diagrama de blocos simplificado do sistema de irrigação inteligente proposto. Ele é composto por sensores climáticos, controlador inteligente (incluindo a RNA e o AG), inversor de freqüência, motor, bomba centrífuga e um sistema de distribuição com tubulações e aspersores ou gotejadores. Figura 1. Diagrama de blocos do Sistema de Irrigação Inteligente. Os sensores climáticos fornecem os dados de entrada da RNA, que por sua vez estima a Eto para as condições climáticas ao longo de um dia. A saída da RNA multiplicada pela constante kc e subtraído o ganho de água devido a precipitação efetiva, representa a necessidade hídrica da cultura, ou seja, o quantidade de água necessária para seu bom desenvolvimento. Este cálculo está demonstrado através da Equação 1. N = Perdas − Ganhos N = Ec − Pef N = ( Eto * kc) − Pef (1) sendo, N: Necessidade hídrica da cultura, em mm; Ec: Evapotranspiração da cultura, em mm; Eto: Evapotranspiração de referência, em mm; Pef: Precipitação efetiva, em mm; kc: coeficiente de cultivo da cultura. Esta informação é passada para o AG, que por sua vez, tem a função de minimizar os gastos com energia elétrica. Para isto, ele considera o valor da tarifa no instante, neste caso, segundo as características brasileiras. A resposta do AG é o comando de freqüência de acionamento do inversor. Portanto, o motor e a bomba serão acionados segundo o comando de freqüência determinado pelo AG. O sistema de distribuição, com tubulações e aspersores ou gotejadores, terá a função de levar a água à cultura, isto de modo uniforme. Ao final de cada período de irrigação as plantas terão recebido com precisão a quantidade de água perdida por evapotranspiração, suprindo suas necessidades hídricas. Porém, de tal modo que o gasto com energia elétrica terá sido o mínimo necessário. Levenberg-Marquardt, descrito por Hagan & Menhaj, 1994. Como critério de parada do treinamento foi utilizada a validação cruzada, que é uma ferramenta estatística que fornece um princípio orientador atraente para o ajuste dos pesos e bias do processo de treinamento da RNA (Stone, 1978). 2.2 Aplicação da RNA para estimação da Eto Para implementação da Rede Neural Artificial foi utilizado um conjunto de dados climáticos diários, medidos e armazenados através de uma estação meteorológica automática, localizada em Dourados, MS (latitude 22o13’16”S, longitude 54o17’01’’W e altitude de 432 m) entre os meses de outubro de 2002 e setembro de 2003. O clima da região é classificado pelo sistema internacional de Koppen como do tipo Cwa, verão úmido e inverno seco, com precipitação média anual de 1500 mm e temperatura média anual de 22 C°. O total de dados foi dividido em um conjunto de treinamento (362 dias, entre outubro de 2002 e setembro de 2003) e um conjunto de teste (31 dias de outubro de 2003). Para treinamento, validação e comparação de resultados foram necessários dados calculados da evapotranspiração de referência (Eto). Para isto, utilizou-se o programa Reference Evapotranspiration Calculation (REF-ET versão 2.0), desenvolvido por Allen (2000). O REF-ET realiza cálculos padronizados da Eto para quinze dos métodos mais utilizados atualmente, seguindo características e procedimentos que são recomendadas pela ASCE (American Society of Civil Engineers) (Jensen, et al., 1990). O programa para treinamento e teste da RNA foi desenvolvido através do MATLAB, juntamente com seu toolbox de RNAs (The Mathworks, 2003). Visando o mapeamento desejado, foram testadas diversas topologias de RNAs do tipo Perceptron de Múltiplas Camadas Alimentadas Adiante (Feedforward) com uma camada de entrada, camada (as) intermediária (as) e uma camada de saída. Para o treinamento da RNA foram utilizados dados calculados pelo REF-ET para o modelo Penman-Monteith, devido à confiabilidade de suas estimativas. Este método não tem sido muito utilizado na agroindústria devido ao número elevado de sensores climáticos e de seu equacionamento complexo. Visto que a temperatura do ar é um dos principais fatores que influenciam na determinação da Eto, seus valores máximos, mínimos e médios medidos ao longo de um dia foram utilizados como entradas da RNA. Na camada intermediária foram usadas funções de ativação do tipo tan-sigmóide, enquanto que na camada de saída foi utilizada função de ativação linear. Os vetores de entrada foram normalizados entre 0.1 e 0.9, de modo a evitar a saturação dos neurônios da camada intermediária. Para melhorar a velocidade de treinamento foi utilizado o algoritmo 2.3 Resultados da estimação da Eto pela RNA A RNA com melhores resultados na estimação da Eto, tendo como entrada dados de temperatura máxima, mínima e média, foi uma rede neural alimentada adiante cuja camada intermediária é dotada de 10 neurônios. Sua topologia pode ser visita na Figura 2. Através da validação cruzada foi determinado o momento ideal para parar o treinamento. Figura 2. Topologia da RNA obtida. Para teste e validação dos resultados foi realizada uma simulação da RNA obtida para uma situação não apresentada durante o treinamento, neste caso, para os 31 dias do mês de outubro de 2003. Através desta simulação a aplicação da RNA pôde ser comparada com outros métodos indiretos de estimativa da Eto amplamente utilizados no manejo da irrigação. Para esta comparação foi tomado o método Penman-Monteith como referência. Analisando os gráficos apresentados na Figura 3, comprova-se que uma RNA treinada adequadamente é capaz de fazer uma boa estimação da Eto. Seus resultados são superiores aos dos métodos comparados. A Tabela 1 mostra o erro de estimação da Eto calculado para o total dos 31 dias em que a RNA foi testada. O erro acumulado ao longo de um período deve ser considerado devido à característica de operação, normalmente empregada, em sistemas de irrigação com intervalos pré-definidos, chamados turnos de rega. Figura 3. Eto estimada pela RNA e comparação com outros métodos indiretos. Tabela 1. Comparação entre os erros de estimativa da Eto. MÉTODO RNA Blanney-Criddle Hargreaves MSE* 0,859 1,103 1,610 eac** + 5,97 + 13,85 - 25,01 * - Mean Square Error ** - Erros acumulado (medido ao longo de um mês) O método de estimação da evapotranspiração de referência através de uma RNA possui diversas vantagens com relação aos outros métodos. Ele permite estimar a Eto com melhor precisão que outros métodos amplamente utilizados, chegando a valores mais próximos ao do método padrão recomendado. Esta boa estimação da Eto aumenta a eficiência no uso da água e da energia elétrica no manejo da irrigação. Além disso, a necessidade de coleta de dados apenas de temperatura para a operação do sistema, proporciona a diminuição do custo de sistemas automáticos de irrigação devido à minimização do número de sensores climáticos e seus periféricos. 2.4 Aplicação do AG para minimização do consumo de energia elétrica O volume de água estimado pela RNA serve como entrada do sistema de otimização baseado em Algoritmos Genéticos. Neste trabalho, o AG que tem como função custo a ser minimizada, o gasto com a energia elétrica utilizada pelo conjunto inversor/motor/bomba. As saídas do AG são comandos de tensão e freqüência para controle do inversor de freqüência. Algoritmos Genéticos é uma técnica de otimização baseada em populações de seres vivos inspirada na teoria da evolução humana, onde cada individuo representa uma possível solução para o problema em questão. Esta população evolui de acordo com operadores probabilísticos de forma que na média as soluções tendem a se tornarem cada vez melhor. Neste trabalho, cada indivíduo representa uma seqüência de comandos imposta ao inversor de freqüência. A qualidade de cada solução é avaliada a- través do custo total de energia elétrica para cada perfil de comando do inversor, ou seja, cada indivíduo. A faixa de variação de freqüência na qual o motor pode ser submetido foi definida entre 10 Hz e 60 Hz. Esta faixa é definida em função das características do sistema de irrigação, principalmente dos parâmetros do conjunto inversor/motor/bomba e da vazão requerida. Para definição do conjunto motor/bomba mais adequado, é levantada a curva característica da instalação, que é função particular do projeto. É importante o levantamento da curva característica do sistema, para confrontá-la com a curva característica da bomba que melhor se aproxime do seu ponto de maior rendimento. O ponto onde a bomba apresenta seu melhor rendimento é chamado “ponto ótimo”, sendo que este é o ponto de trabalho característico definido no projeto da instalação. Este ponto é a intersecção da curva característica da bomba com a curva característica do sistema. Evita-se sempre optar por um determinado modelo de bomba cujo ponto de trabalho encontra-se próximo aos limites extremos da sua curva característica, isto devido a dois motivos. Primeiro devido ao baixo rendimento da bomba nesta região da curva característica. Segundo, devido a proximidade do limite de máxima pressão e mínima vazão. Após este ponto, a vazão se extingue, ou seja, não há água irrigada, restando apenas a pressão máxima do equipamento denominada shoot-off. Então, considerando as definições do sistema de irrigação, é buscado o ponto ótimo de acionamento do conjunto inversor/motor/bomba a partir dos dados de entrada do AG. Para teste e validação dos resultados foi definido um sistema de irrigação com as seguintes características: • Tipo de cultura: melão; • Área: 10 x 10 metros; • Distância entre área e bomba: 10 metros; • Distância entre bomba e captação: 10 metros; • Tipo do sistema: gotejamento; • Desnível de sucção: 2 metros; • Desnível de recalque: 7 metros; • Altura manométrica total: 31,92 mca; • Potência do conjunto moto-bomba: 2 CV; • Rendimento nominal da bomba: 19,93%. As relações de altura manométrica, vazão e potência se relacionam segundo as Equações 2, 3 e 4, descritas abaixo. ⎛ N novo ⎞ ⎟⎟ HB2 = HB1 * ⎜⎜ ⎝ N no min al ⎠ ⎛ N novo ⎞ ⎟⎟ Q2 = Q1 * ⎜⎜ N ⎝ no min al ⎠ 2 (2) (3) ⎛ N novo P2 = P1 * ⎜⎜ ⎝ N no min al ⎞ ⎟⎟ ⎠ 3 (4) sendo, HB: altura manométrica, em m; N: freqüência de comando, em Hz; Q: vazão da bomba, em m3/h ; P: potência aplicada, Watts . Para uma exposição clara dos resultados, às 24 horas do dia foram divididas em três intervalos: das 12:00 às 21:30; das 21:30 às 06:00; das 6:00 às 12:00. O AG define as freqüências de comando do motor para cada um destes intervalos, de forma a aplicar o volume total de água necessário ao longo de um dia de forma otimizada. O número de intervalos de tempo pode ser bem maior, aumentando a flexibilidade e melhorando o resultado. Em contrapartida isto afeta sensivelmente o tempo de processamento do AG devido ao aumento do número de variáveis. O algoritmo do AG desenvolvido gera inicialmente uma população e em seguida a avalia de acordo com o custo da energia elétrica para cada perfil de acionamento. Por exemplo, os perfis de acionamento do inversor da Figura 4 representam diferentes indivíduos, sendo que e o gasto com energia elétrica relativo a cada um destes avalia o quanto cada individuo está adaptado ao ambiente. Através de varias simulações na tentativa de encontrar os parâmetros que melhor se adaptam ao AG, determinou-se uma taxa de crossover de 60 %, e uma população em torno de 70 indivíduos. Foi utilizado o método da roleta, já que o custo é sempre um valor maior que zero e nunca houve problemas com superindivíduos que costumam causar convergência prematura. A taxa de mutação foi definida em 2%. Com a utilização do controle da freqüência do inversor através do AG seriam gastos R$0,4624. Isto representa uma redução de 60% no gasto com energia elétrica para operação do sistema de irrigação. O perfil de comando do inversor determinado pelo AG para este caso pode ser visto na Figura 4.b. Esta situação utilizada para comparação foi mostrada para um dia de operação, considerando uma tarifa do grupo A categoria rural irrigante. Esta é uma opção tarifária regulamentada no Brasil que é características de agricultores irrigantes. Seus valores tarifários são reduzidos para o horário compreendido das 21:30 ás 6:00, visando incentivar a utilização dos sistemas de irrigação fora do horário de máximo consumo de energia elétrica. Logicamente os valores percentuais de redução mensal irão variar de acordo com o enquadramento tarifário, bem como com a contratação de demanda e excedentes, se for o caso. Porém, independentemente destas características o uso de AG com objetivo de minimizar os custos com energia elétrica para irrigação terá bons resultados. 2.5 Resultados da minimização do consumo de energia elétrica através do AG Para teste e validação dos resultados do AG, foi considerado um sistema de irrigação com as características citadas anteriormente e, com aplicações diárias de lâminas de água. Supôs-se, também, que a RNA estimou a necessidade de aplicação de um volume de 8 m3 no intervalo de um dia. Para comparação foi utilizado o mesmo volume de água e intervalo de tempo. No caso de manejo da irrigação do modo convencional a vazão não é controlada, é feito apenas o controle liga-desliga do sistema de bombeamento. Neste caso a bomba é acionada nas suas características nominais até que toda a água requerida pela cultura seja irrigada. Assim sendo, foi considerada a utilização do sistema de bombeamento aproveitando ao máximo o horário de baixo custo da tarifa de energia elétrica. O perfil de comando do inversor para este caso pode ser visto na Figura 4.a. Deste modo, seriam gastos R$1,1749 em um dia de irrigação. Figura 4. Perfis de comando do inversor: (a) Perfil considerando manejo da irrigação convencional. (b) Perfil definido pelo AG. 3 Conclusão Neste trabalho foi apresentado um sistema de irrigação inteligente capaz de diminuir o consumo de energia elétrica e água no manejo da irrigação. Através de uma Rede Neural Artificial foi determinada a evapotranspiração de referência, e, conseqüentemente a quantidade ideal de água que deve ser irrigada. Por outro lado, um Algoritmo Genético teve a função de otimizar os custos com energia elétrica para irrigação da quantidade de água da quantidade de água necessária para a cultura conforme determinado pela RNA. Os resultados mostraram o grande potencial do sistema proposto. As principais contribuições deste Sistema de Irrigação Inteligente são: aumento da eficiência no uso da água e da energia elétrica; minimização dos gastos com energia elétrica no manejo da irrigação; redução da quantidade de sensores climáticos necessários para o manejo adequado da irrigação. Observando os resultados e as contribuições deste sistema, pode-se concluir que sua implementação trará grandes benefícios aos produtores agrícolas com baixo nível de investimento. Agradecimentos Os autores gostariam de agradecer a Universidade Federal de Mato Grosso do Sul e ao CNPQ, que deram suporte financeiro para a realização deste projeto. Referências Bibliográficas Allen, R. G. (2000). REF-ET: Reference evapotranspiration calculator; Version Windows 2.0, Utah State University, Logan, USA. Amigo, M. R., Oliveira, C. D. (2000). Otimização do Consumo de Energia Elétrica Aplicada ap Controle de Vazão de Bombas Centrífugas Radiais, WEG, São Paulo. Bernardo, S. (1995). Manual de Irrigação, Viçosa, UFV, Imprensa Universitária. Bose, B. K.; Modern Power Electronics and AC Drives; New York; 2001. Campbell Scientific Inc. (1993). On-line measurement of potential evapotranspiration with the Campbell Scientific automated weather station. Dayhoff, J. E. (1990). Neural Networks Architetures: an introduction, Van Nostrand Reinhold, New York. Doorenbos, J., Kassan, A. H. (1994). Efeito da água no rendimento das culturas. Estudos FAO, Irrigação e Drenagem 33, Tradução Gheyi, H.R. e outros, UFPB, Campina Grande. Goldberg E. (1989). Genetic Algorithms in Search, Optimization, and Machine Learning; Addison Wesley. Gomes, H. P. (1999). Engenharia de Irrigação; Universidade Federal da Paraíba; 3ed. Hagan, M. T., Menjah, M. (1994). Training feedforward networks with the Marquardt algorithm, IEEE Transactions On Neural Networks, vol 5, no. 6. Haupt R. L., Haulp S. E. (1998). Pratical Genetic Algorithms; A Wiley-interscience publication. Haykin, S. (1999). Redes Neurais, Ed. Bookman, São Paulo. Jensen, M. E., Burman, R. D., Allen, R. G. (1990). Evapotranspiration and irrigation water requirements, ASCE, Manuals and Reports on Engineering Practice No. 70, New York. Kosko, B. (1992). Neural networks and fuzzy systems: a dynamical system approach to machine intelligence, Prentice Hall, New Jersey. Kovács, Z. L. (2002). Redes neurais artificiais: fundamentos e aplicações, Ed. Livraria da Física – USP, São Paulo. Oliver, J. A. (1998). Adjustable Speed Drives – Applications Guide, EPRI, Eletric Power Research Institute, Palo Alto, California. Pinto J. O. P. (1998). Cluster Analysis Using GA, The University of Tennessee. Stone, M. (1978). Cross-validation: A review, Mathematische Operationsforschung Statistischen; Serie Statistics, vol. 9. The Mathworks, Inc (2003). Neural Network Toolbox User’s Guide.
Download