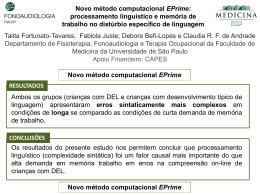
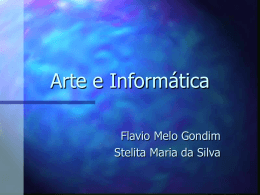
PARALELIZAÇÃO DO CÓDIGO DE MECÂNICA DOS FLUIDOS BRU3D Leonardo Ostan Bitencourt IC [email protected] João Luiz Filgueiras de Azevedo PQ [email protected] Resumo Este artigo tem por finalidade paralelizar o código BrU3D. Este código é capaz de simular escoamentos de mecânica dos fluidos em torno de configurações aeroespaciais complexas de interesse do Instituto de Aeronáutica e Espaço (IAE), como o Veículo Lançador de Satélites brasileiro (VLS). Quanto maior a complexidade das geometrias simuladas, mais recursos computacionais como memória e, principalmente, tempo de processamento são necessários. A paralelização do código BrU3D possibilitará suprir estas duas limitações e representa um avanço no desenvolvimento das ferramentas de CFD do Instituto de Aeronáutica e Espaço. Para tal, foi necessário um estudo minucioso de todo o processamento do código BrU3D original para identificar todos os processos paralelizáveis. Como resultado, a solução do código BrU3D paralelizado é idêntica ao do código serial, o que é mostrado nos resultados. Abstract The present paper has the objective of describing the strategy adopted for parallelization of the BrU3D CFD code. This code is able to simulate aerodynamic flows over complex aerospace configurations of interest to Instituto de Aeronáutica e Espaço (IAE), with particular emphasis on the configuration of the first Brazilian Satellite Launcher (VLS). Complex configurations usually require additional computational resources, namely memory and CPU time. The parallelization of the BrU3D code has the objective of lessening such limitations by allowing the use of distributed memory PC clusters for the simulations of interest. In this context, the work here reported represents an important advancement in the development of CF tools at IAE. A careful analysis of the flow of information in the original BrU3D code was performed, aiming at identifying the parallelizable processes. As a result, the solutions of the parallelized BrU3D code are identical to those obtained with the serial code, as the simulations here reported indicate. 1. INTRODUÇÃO O campo da mecânica computacional dos fluidos (CFD)[1] já causou um grande impacto na ciência e engenharia de dinâmica dos fluidos, com aplicações amplas que vão desde o projeto externo completo de um avião até o projeto de motores mais eficientes. Contudo problemas de mecânica dos fluidos apresentam dificuldade em sua resolução, mesmo em casos simples. A quantidade de problemas de engenharia que não apresenta solução analítica supera em muito os que as têm. Por isso, antigamente, engenharia se fazia principalmente por exaustivos ensaios em laboratório. Após o surgimento do computador, programas começaram a auxiliar o engenheiro em todo o seu projeto, desde a concepção estrutural em ferramentas CAD até a fase de testes. O trabalho desenvolvido se insere no desenvolvimento de ferramentas numéricas de mecânica dos fluidos computacional que simulem escoamentos em configurações aeroespaciais de interesse para o Instituto de Aeronáutica e Espaço (IAE/CTA), sendo desenvolvido pelo grupo de CFD deste instituto. A meta do grupo de CFD do IAE é o desenvolvimento de ferramentas computacionais utilizadas no estudo das propriedades aerodinâmicas e aerotermodinâmicas de problemas de interesse aeroespacial, como veículos de sondagem e do primeiro veículo lançador de satélites brasileiro (VLS). O código BrU3D[2-3] resolve numericamente as equações de Navier-Stokes para o regime estacionário através do método de volumes finitos em malhas não-estruturadas. Ele apresenta precisão de 2ª. ordem no tempo e espaço, pois utiliza um método de Runge-Kutta de 5 estágios adaptado para avançar no tempo. A implementação foi feita na linguagem de programação Fortran 77 e apresenta quase 22500 linhas de código. O objetivo deste trabalho foi implementar uma solução eficiente e barata que aumentasse a capacidade de processamento do laboratório computacional do IAE, expandindo a memória disponível e reduzindo o tempo necessário para a resolução dos problemas de CFD. A solução encontrada foi utilizar microcomputadores já existentes ligados em rede e distribuir o processamento que antes só se dava em uma máquina. Para distribuir o processamento entre os computadores [4], ou nós, utilizou-se da biblioteca MPI[5-7] (Message Passing Interface), além da biblioteca METIS para particionar de maneira muito eficiente grafos não-estruturados. 2. ASPECTOS TEÓRICOS E NUMÉRICOS A Mecânica Computacional dos Fluidos (CFD) pretende desenvolver a capacidade de simular o comportamento de um fluido tridimensional, compressível, viscoso e turbulento. Para isso, é necessário modelar matematicamente e numericamente o fluido através das equações de Navier-Stokes, que serão descritas abaixo. 2.1 FORMULAÇÃO TEÓRICA DE MECÂNICA DOS FLUIDOS Estas equações representam a formulação mais geral para um escoamento de um fluido contínuo. As equações de Navier-Stokes, para um gás perfeito, sem a geração de calor e com forças de campo negligenciáveis podem ser escritas conforme apresentado na Eq. 1-3. dfsdfsdfdsfdsfsdfsdfsdfsdfsdfsdfsdfsdfsadfasdfdsfsdfd(1) dfsdfsdfdsfdsfsdfsdfsdfsdfsdfsdfsdfsdfsadfasdfdsfsdfd sdfdsdsdfsdfsdfsdfasdfsdfsdfsadfsadfsadfsadfsdafasdf(2) vsdfsdfsdfsdfdsfsdfsdfsfsadfsads fsadfsdfsdfsdfsdfsadf(3) Nas equações acima, ρ, p e H são, respectivamente, a densidade, a pressão e a entalpia total ou de estagnação; é a velocidade do fluido, é o tensor viscoso, é o vetor do fluxo de tranferência de calor e t é o tempo. Este sistema de equações não está fechado, ainda são necessárias mais equações para que o número de variáveis seja igual ao de incógnitas. No contexto do código BrU3D, o fluido pode ser aproximado a um gás perfeito. Então, a equação para um gás perfeito pode ser adicionada ao sistema, (4) p = ρ R T = (γ – 1) ρ ei, onde a enegia interna específica, é dada por ei = Cv T . (5) Aqui, Cv é o calor específico à volume constante, T é a temperatura do fluido e γ = Cp/Cv é a razão dos calores específicos. O vetor de fluxo de calor é calculado de acordo com a lei de Fourier para a condução de calor como , (6) onde k é o coeficiente de condutividade térmica do fluido. As componentes do tensor viscoso são dadas por ddddddddddddddddddddddddddddddddddd(7) onde µ é o coeficiente de viscosidade do fluido e λ é o segundo coeficiente de viscosidade. Para as aplicações de interesse, a hipótese de Stokes pode ser assumida, que fornece λ = -2/3 µ . (8) A entalpia total ou de estagnação de um fluido é definida como 2 , (9) e a derivada substancial é dada por . (10) 2.2 COMPUTAÇÃO PARALELA O processamento paralelo[4] permite a solução de problemas que exigem muito processamento e memória utilizando computadores de modestos recursos computacionais, pois decompõe processamento do problema entre vários computadores. Assim, contribui para o desenvolvimento da ciência, seja por reduzir limitações de memória, seja por aumentar a velocidade de processamento, ou na maioria dos casos ambas. No presente trabalho, a arquitetura distribuída foi adota, pois era necessário expandir a capacidade de processamento a um custo baixo. As arquiteturas de memória compartilhada apresentam a grande vantagem de serem mais rápidas, pois não há necessidade da troca de dados e o acesso ao bus é centenas de vezes mais veloz. Contudo, o custo de cada supercomputador é altíssimo, sendo da ordem de alguns milhões de dólares. A decomposição do problema, independente da forma como é feita, deve priorizar um balanço adequado de carga e a minimização de comunicação entre processadores no caso de memória distribuída. O balanço de carga adequado consiste em dividir igualmente o trabalho entre os processadores disponíveis. Já a minimização da comunicação entre os nós, como o nome já indica, visa diminuir ao máximo a comunicação ou troca de mensagens, pois representam tempo a menos de processamento que seria gasto na solução do problema. 2.3 PARTICIONAMENTO DE MALHAS COMPUTACIONAIS A malha computacional representa um espaço discretizado descrito por células tridimensionais formadas por pontos em coordenadas cartesianas. A paralelização do código BrU3D utiliza o conceito de decomposição de domínios, ou seja, cada nó do cluster resolve as equações de Navier-Stokes para somente algumas partições de células. Por isso, é necessário previamente dividir/particionar o domínio/malha computacional para que todos os processadores atuem em seus respectivos domínios. Para isso, utilizou-se uma biblioteca robusta de particionamento de malhas e grafos chamada METIS. O resultado do particionamento de uma malha não-estruturada pode ser visualizado na Fig. 1. Figura 1 : Visualização de uma malha computacional particionada pelo METIS. 3. SOLUÇÃO IMPLEMENTADA NO CÓDIGO BRU3D Após estudar detalhadamente o funcionamento do código BrU3D, e pesquisar na literatura trabalhos semelhantes de paralelização, chegou-se à conclusão que a melhor estratégia de paralelização seria efetuar a decomposição de domínios ou decomposição da malha computacional. Adotando esta estratégia, alterações mínimas no código BrU3D original foram necessárias, pois cada partição ou domínio decomposto é tratado como uma malha computacional. Nas interfaces entre domínios é criada uma nova condição de contorno, que é atualizada com as propriedades das partições vizinhas. Logo, o projeto possui duas etapas: 3 • • Decomposição da malha computacional; Gerenciamento da comunicação entre os processadores. 3.1. DECOMPOSIÇÃO DA MALHA COMPUTACIONAL A decomposição da malha, ou domínio computacional, consiste em gerar N subdomínios que, juntos, reconstituem o domínio original. Uma decomposição bem feita, considerando-se o mesmo tempo de processamento por volume, deve gerar subdomínios com aproximadamente o mesmo número de volumes. O resultado é um array de tamanho igual ao número de vértices do grafo que carrega como informação a relação nó-partição. Com esta informação, dois arquivos são gerados. Um contendo a volume-partição e outro contendo as faces de interface entre cada partição. 3.2. COMUNICAÇÃO ENTRE OS PROCESSADORES A condição de contorno de interface representa uma extensão do subdomínio. Esta condição de contorno é implementada através de volumes ghost atualizados, a cada iteração, com as propriedades do volume pertencente ao subdomínio vizinho e que compartilha a face onde foi aplicada a condição de contorno de interface. A Fig. 2 ilustra o funcionamento da condição de contorno. Figura 2: O volume ghost p na partição 1 possui as propriedades do volume p na partição 2, já o volume ghost k na partição 2 possui as propriedades do volume k da partição 1. 4. VISÃO GERAL DO FUNCIONAMENTO DO CÓDIGO BRU3DPAR Cada processador ou nó do cluster possui uma cópia do programa BrU3DPar, assim como uma cópia dos arquivos de malha.. Após o comando “mpirun”, o programa BrU3DPar é acionado simultaneamente em todos os computadores/nós do cluster. A inicialização do código Bru3dPar diferencia-se muito pouco da inicialização do código BrU3D original. Os arquivos de malha anteriores são lidos normalmente, contudo, cada processador somente armazena os volumes e condições de contorno do seu domínio. Isso é possível através da leitura do arquivos que contém as relações volume-partição e as condições de contorno de interface. A cada iteração do código, o resíduo máximo e as condições de contorno são autalizadas, inclusive, as novas condições de contorno de interface. O pseudo-algoritmo abaixo mostra o funcionamento do BrU3DPar. Início Inicialização do MPI ; Carrega malha computacioanl; Atualiza Condições de Contorno de Interface; // INTERFACE Enquanto (A solução não Converge OU número de iterações não excedeu o limite) Início Avança no tempo; // Aplicação do Runge-Kutta de 5 passos Atualiza condições de contorno; Se (Necessário SALVAR a solução atual) Então Início Gera o arquvio TECPLOT Gera o arquivo com a solução atual Fim Fim 4 5. RESULTADOS O resultado apresentado neste relatório foi simulado num cluster formado por dois nós ligados a uma rede 100Mbits. A solução numérica convergida apresenta máximo resíduo da densidade no escoamento da ordem de 10-7 . Compara-se o resíduo do código BrU3D original com o código BrU3DPar, faz-se o mesmo com a distribuição de Cp ao longo do hemisfério-cilindro. Também é exibida uma visão 2D da configuração simulada. O resultado apresentado não tem por objetivo comparar desempenho, apenas mostrar a coerência dos resultados numéricos. A malha computacional mostrada na Fig. 3 é uma malha tridimensional sobre a configuração de um hemisfério-cilindro. Ela é composta por 21916 tetraedros e é considerada uma malha modesta em relação às malhas nas quais se pretende utilizar o código BrU3DPar. Especificamente, a Fig. 3 apresenta apenas a malha superficial, composta evidentemente de triângulos. Figura 3: Visão da malha superficial sobre o hemisfério-cilindro Os parâmetros de simulação utilizados foram número de CFL=0.2, número de Mach do escoamento não perturbado, M∞ = 2.0 e ângulo de ataque α = 0 graus. O decaimento do resíduo máximo exibido na Fig. 4(a) demonstra que as duas soluções numéricas estão convergindo, ou seja, a solução numérica do escoamento está a cada iteração se aproximando da solução exata. Além disso, as duas curvas sobrepuseram-se exatamente mostrando que a paralelização não alterou em nada o processo de cálculo do código original. O gráfico da Fig. 4(b) demonstra a coerência dos resultados. Figura 4: (a) Gráfico comparativo do decaimento do resíduo máximo pelo número de iterações do BrU3D Serial e do BrU3DPar Paralelo. (b) Gráfico comparativo de Cp ao longo da superfície do hemisfério. 5 Como é possível observar na Fig. 4(a), os resultados do BrU3D original se sobrepuseram aos valores calculados pelo BrU3DPar, como não poderia ser diferente. Logo abaixo, na Fig. 5 é apresentada uma visão 2D do campo de velocidade e pressão em torno do hemisfério-cilindro, mostrando contornos de pressão e vetores velocidade em um plano longitudinal do escoamento e sobre a superfície do corpo. Figura 5: Campo de velocidades ao longo do hemisfério-cilindro além das curvas de pressão 6. CONSIDERAÇÕES FINAIS A paralelização do código BrU3D foi realizada com sucesso, os resultados numéricos foram consistentes e o resíduo convergiu como esperado, mostrando a consistência da paralelização e das bibliotecas utilizadas, como LAM-MPI e Metis. Contudo, devido à falta de tempo e máquinas suficientes para realizar testes de desempenho, não foi possível medir o ganho de desempenho natural decorrente da paralelização. Na próxima bolsa de iniciação científica, o trabalho de paralelização terá continuidade e avaliações de desempenho serão feitas. AGRADECIMENTOS Os autores agradecem ao CNPq pelo suporte fornecido através do Processo No. 501200/2003-7 e do Processo No. 502053/2004-6. O primeiro autor gostaria ainda de agradecer aos colegas Edson Basso e Enda Bigarella pela ajuda fornecida, que se mostrou essencial para o bom desenvolvimento do presente projeto. REFERÊNCIAS BIBLIOGRÁFICAS [1] Fletcher, C.A.J., Computational Techniques for Fluid Dynamics, Vol. I, Spring-Verlag, New York, 1988. [2] Scalabrin, L.C., “Numerical Simulations over Three-Dimensional Flows over Aerospace Configurations”, Master Thesis, Divisão de Engenharia Aeronáutica, Instituto Tecnológico de Aeronáutica, São José dos Campos, SP, 2002. [3] Bigarella, E.D.V, Basso, E., and Azevedo, J.L.F., “Multigrid Adaptative-Mesh Turbulent Simulations of Launch Vehicle Flows”, AIAA Paper No.2003-4076, Proceedings of the 21st AIAA Applied Aerodynamics Conference, Orlando, FL, June 2003. [4] http://www.cs.uncc.edu/~abw/parallel/par_prog/ - “Parallel Programming: Techniques and Applications” – UNC Charlotte. [5] http://www.ncsa.uiuc.edu/Divisions/eot/Training/ - Tutorial on-line de MPI do National Center for Supercomputing Applications (NCSA). [6] http://www.lam-mpi.org – Site oficial da biblioteca LAM-MPI.. [7] http://www-unix.mcs.anl.gov/mpi/learning.html - Tutorial on-line de MPI. 6
Download