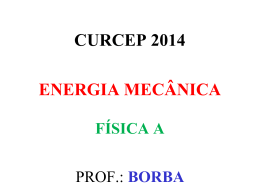
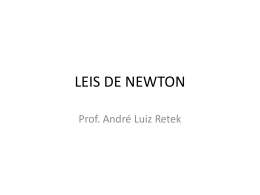
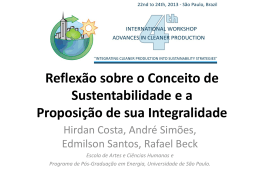
FEP0111 - Fı́sica I Relatório do Experimento 1 Sistema Massa - Mola Fernando Henrique Ferraz Pereira da Rosa 4 de novembro de 2005 Sumário 1 Introdução 2 2 Objetivos 2 3 Procedimento experimental 3.1 Método estático . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.2 Método dinâmico . . . . . . . . . . . . . . . . . . . . . . . . . . . 2 2 2 4 Resultados 4.1 Método estático . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4.2 Método dinâmico . . . . . . . . . . . . . . . . . . . . . . . . . . . 3 3 5 5 Discussão e conclusão 8 1 1 Introdução Esse relatório descreve o experimento Sistema Massa - Mola, realizado no dia 7 de outubro de 2005, na turma A de laboratório de fı́sica da disciplina FEP0111 - Fı́sica I, ministrada para o Instituto Oceanográfico. Aplicam-se conceitos básicos de fı́sica experimental, como teoria de erros e medidas, assim como alguns conceitos de mecânica, centrando-se no estudo de um sistema constituı́do por uma mola e uma massa fixada. 2 Objetivos Este experimento tem como objetivo a determinação da constante elástica k, de uma mola, por meio de análise gráfica. Esta determinação será efetuada de duas maneiras distintas: estática e dinamicamente. 3 3.1 Procedimento experimental Método estático Nessa etapa do experimento, utilizamos corpos de diferentes massas, para medir, com uma escala vertical milimetrada, a distensão de uma mola de constante elástica k. O sistema em estudo pode ser observado na Figura 1. Figura 1: Sistema massa-mola vertical. O corpo de massa m é colocado no apoio ao final da mola, onde é exercida a ação da força peso e a força restauradora da mola, em sentido oposto. Foram colocados 5 objetos de massas diferentes na base da mola, e medido o deslocamento ∆x para cada objeto. O peso de cada objeto foi medido em uma balança digital com precisão de 0, 0001kg. O deslocamento ∆x foi medido através de uma régua graduada de acrı́lico, de 30cm, com incerteza de 0, 0005m. Os dados obtidos estão disponı́veis na Tabela 1. 3.2 Método dinâmico Nessa etapa do experimento utilizamos os Objetos 1, 2, 3, 4 e 5, no mesmo esquema experimental da Figura 1, mas nesse caso colocamos o sistema para 2 medida m ± 0,0001 (kg) x ± 0,0005 (m) F ± 0,0001 (N) Objeto 1 0,0615 0,1040 0,6015 Objeto 2 0,1112 0,1870 1,0875 Objeto 3 0,0184 0,0300 0,1799 Objeto 4 0,0199 0,0345 0,1946 Objeto 5 0,0202 0,0335 0,1976 Tabela 1: Medidas da massa, força e deslocamento vertical da mola oscilar. Utilizando um cronômetro, com precisão de 1 milisegundo, efetuamos a medida do tempo ocorrido após dez oscilações, determinando assim o perı́odo de oscilação da mola. Foram utilizadas 10 oscilações ao invés de somente 1, para obter uma medida mais confiável do perı́odo da mola, pois em experimentos em que se usa cronômetro há sempre um certo atraso do medidor em acioná-lo no começo e fim do evento de interesse a ser medido. Com 10 oscilações se dilui esse efeito na primeira e última oscilação. Os dados desse experimento estão disponı́veis na Tabela 2. medida m ± 0,0001 (kg) t1 0 ± 0,01 (s) T ± 0,001 (s) Objeto 1 0,0615 6,93 0,693 Objeto 2 0,1112 9,04 0,904 Objeto 3 0,0184 4,59 0,459 Objeto 4 0,0199 4,75 0,475 Objeto 5 0,0202 4,28 0,428 Tabela 2: Medidas da massa m, tempo t1 0 de dez oscilações e perı́odo T 4 Resultados 4.1 Método estático Uma maneira de analisar os dados da Tabela 1 é através do diagrama de dispersão de F por ∆x, com o qual temos uma visualização mais direta do comportamento do sistema. No eixo das abscissas colocamos os valores das distensões da mola (deslocamento vertical), no eixo das ordenadas colocamos as correspondentes forças que proporcionam esta variação em x. O gráfico resultante das medidas da Tabela 1 se encontra na Figura 2. Podemos observar uma relação linear bem forte entre as duas quantidades. Sabemos pela Lei de Hooke [2] que: F = kx e portanto: k= ∆F ∆x Podemos portanto obter o valor da constante elástica da mola através do coeficiente angular da reta de regressão linear de mı́nimos quadrados passando pela origem. Fazendo esse ajuste no R [3], obtemos: > mod.reg <- lm(forcas ~ -1 + deltax) > summary(mod.reg) 3 1.0 0.8 0.6 0.4 0.2 Força correspondente (N) 0.05 0.10 0.15 Deslocamento vertical da mola ∆x (m) Figura 2: Sistema massa-mola vertical. Gráfico de diagrama de dispersão dos valores de distensão da mola (∆x) pelas forças F . Call: lm(formula = forcas ~ -1 + deltax) Residuals: 1 2 -0.00268 0.00113 3 4 5 0.00562 -0.00583 0.00298 Coefficients: Estimate Std. Error t value Pr(>|t|) deltax 5.8095 0.0206 283 9.4e-10 *** --Signif. codes: 0 ’***’ 0.001 ’**’ 0.01 ’*’ 0.05 ’.’ 0.1 ’ ’ 1 Residual standard error: 0.00455 on 4 degrees of freedom Multiple R-Squared: 1, Adjusted R-squared: 1 F-statistic: 7.98e+04 on 1 and 4 DF, p-value: 9.42e-10 Onde obtemos que k = 5, 81 ± 0, 02N/m. A reta ajustada se encontra na Figura 3, onde podemos observar que o ajuste se adequou muito bem aos dados. 4 1.0 0.8 0.6 0.4 0.2 Força correspondente (N) 0.05 0.10 0.15 Deslocamento vertical da mola ∆x (m) Figura 3: Sistema massa-mola vertical. Gráfico de diagrama de dispersão dos valores de distensão da mola (∆x) pelas forças F , com a reta ajustada utilizando a relação F = kx, com k = 5, 81 estimado pelo ajuste de mı́nimos quadrados. 4.2 Método dinâmico Analisamos os dados da Tabela 2 através de um gráfico di-log de T por m. No eixo das abscissas colocamos os valores das diferentes massas, e no eixo das ordenadas colocamos os correspondentes valores do perı́odo de oscilação. O gráfico referente aos dados da Tabela 2 se encontra na Figura 4. Temos [1] que o perı́odo T se relaciona à constante elástica da mola k, através da equação: r m T = 2π . k Aplicando o logaritmo nos dois lados da equação acima, obtemos: log T = log 2π r m k √ 2π = log √ + log m k 2π log m = log √ + 2 k 5 0.9 0.8 0.7 0.6 0.5 Perído de osciliação T (s) 0.02 0.04 0.06 0.08 0.10 Massa do objeto m (kg) Figura 4: Comportamento do perı́odo de acordo com a massa do sistema oscilante, T × m. Obtemos assim, que em escala di-log, a relação entre o perı́odo e a massa é linear em k. Basta então ajustarmos uma reta ao gráfico 4, fixado o coeficiente angular em log2 m e obtermos o intercepto. Dado esse ajuste: log T = β0 + log m , 2 (1) 2π , temos um estimador da constante notamos ainda que igualando β0 a log √ k elástica da mola k: 2π β0 = log √ ⇒ k = k 2π eβ0 2 Fazendo esse ajuste no R, obtemos: > mod.dinam <- lm(log(T) ~ offset(log(massas)/2)) > mod.dinam Call: lm(formula = log(T) ~ offset(log(massas)/2)) Coefficients: (Intercept) 1.11 6 (2) assim βˆ0 = 1, 1120. Usando a equação 2, temos k = 4.27. Uma forma alternativa de obter k, é realizar o ajuste baseado diretamente na relação da equação 1. Para isso basta usarmos um procedimento de ajuste de mı́nimos quadrados não lineares. Fazemos isso no R com os comandos abaixo, utilizando como valor de partida a estimativa de k obtida pelo método acima: > mod.nlin <- nls(T ~ 2 * pi * sqrt(massas/k), + start = list(k = 4.27)) > mod.nlin Nonlinear model: data: k 4.7948 residual regression model T ~ 2 * pi * sqrt(massas/k) parent.frame() sum-of-squares: 0.013346 0.7 0.6 0.5 Perído de osciliação T (s) 0.8 0.9 Onde vemos que obtemos a estimativa para k um pouco maior de 4, 79. Na Figura 5 temos as retas no gráfico di-log para os dois ajustes diferentes. Os dois ajustes se aproximam razoavelmente dos valores observados, mas nenhum dos dois fica tão bom quanto o ajuste obtido no gráfico do experimento estático. método linear, k = 4.27 método não−linear, k = 4.79 0.02 0.04 0.06 0.08 0.10 Massa do objeto m (kg) Figura 5: Comportamento do perı́odo de acordo com a massa do sistema oscilante, T × m, com os dois ajustes de k. 7 5 Discussão e conclusão Através desse experimento foi possı́vel obter o valor da constante elástica da mola por meio de dois experimentos diferentes. Duas abordagens de análise no método estático, permitiram ainda obter duas estimativas diferentes para o valor de k. Na Tabela 3 temos um resumo das estimativas obtidas. método estático dinâmico: linear dinâmico: não-linear estimativa 5, 81 ± 0, 02 4, 27 ± 0, 02 4, 79 ± 0, 01 Tabela 3: Estimativas obtidas para a constante elástica da mola k, nesse experimento Consideramos que o melhor valor a ser adotado é o obtido no experimento estático, ou seja k = 5, 81. Por razões analı́ticas, consideramos esse valor melhor pois como pudemos observar na Figura 3 a reta ajustada ficou muito mais próxima dos dados nesse caso. Outra razão para escolhermos essa estimativa é por motivos experimentais. No experimento estático as condições estavam melhor controladas, e haviam menos variáveis influenciadas pelos experimentadores. Bastava colocar uma dada massa no suporte da mola e medir o deslocamento ∆x com a reta. No caso do experimento dinâmico era mais complicado conseguir obter medições confiáveis, principalmente no caso das massas menores, pois muitas vezes o sistema entrava em movimento de pêndulo, e tı́nhamos que começar a medição novamente para aquele objeto. Além disso, as medições ficavam sujeitas aos reflexos do operador do cronômetro, apesar desse efeito ser atenuado pelo uso de 10 oscilações para se obter a estimativa da medição do perı́odo. Referências [1] Máximo, A. e Alvarenga, B. 1997. Curso de Fı́sica 1. São Paulo: Scipione. [2] Halliday, D., Resnick, R. e Walker, J. 2001. Fundamentos de Fı́sica: Mecânica 1. Rio de Janeiro: LTC. [3] R Development Core Team, R: A language and environment for statistical computing, R Foundation for Statistical Computing, (2004). Sobre A versão eletrônica desse arquivo pode ser obtida em http://www.feferraz. net Copyright (c) 1999-2005 Fernando Henrique Ferraz Pereira da Rosa. É dada permiss~ ao para copiar, distribuir e/ou modificar este documento sob os termos da Licença de Documentaç~ ao Livre GNU (GFDL), vers~ ao 1.2, publicada pela Free Software Foundation; Uma cópia da licença em está inclusa na seç~ ao intitulada "Sobre / Licença de Uso". 8
Baixar