Sistema Eletrônico para Controle do Nível de Água em
Reservatórios
Rodrigo Moreira Bacurau1, Júlio César Ferreira de Melo Júnior2, Brauliro
Gonçalves Leal3, Sérgio Aurélio Ferreira Soares1
1
Graduando do Curso de Engenharia da Computação da Universidade Federal do Vale
do São Francisco – UNIVASF
CEP 48.902-300 – Juazeiro – BA – Brasil
2
Professor do Colegiado de Engenharia Agronômica da UNIVASF
CEP 56.300-000 – Petrolina – PE – Brasil
3
Professor do Colegiado de Engenharia da Computação da UNIVASF
CEP 48.902-300 – Juazeiro – BA – Brasil
{rodrigo.bacurau, julio.melo, brauliro.leal}@univasf.edu.br,
[email protected]
Abstract. In several practical applications and experimental activities it is
desirable to keep the water level in a reservoir in a pre-established interval.
In this work, we modeled, developed, and tested a system to automate the
control of the level of a water reservoir. The system is composed by one
sensor element (pressure transductor), connected to a circuit electronic
microcontrolled, that controls the water column height by open and close
commands of a hydraulic electrically controlled valve. In the system interface,
the water level and its variation are configured using a LCD display and
buttons. The main features of this control system is the efficiency, usefulness
and easy maintenance.
Resumo. Em diversas aplicações práticas e atividades experimentais é
desejável manter o nível de água em reservatórios dentro de um intervalo préestabelecido. Neste trabalho foi modelado, desenvolvido e avaliado um
sistema para automatizar o controle da carga hidráulica de reservatórios. O
sistema controla a carga hidráulica utilizando um transdutor de pressão
conectado a um circuito eletrônico mediante a abertura e fechamento de uma
válvula hidráulica de acionamento elétrico. Neste sistema, a altura do nível
d’água desejado e sua variação percentual são configuradas por meio de um
display LCD e botões. O sistema de controle desenvolvido mostrou-se
eficiente, de fácil manutenção e de grande utilidade.
1. Introdução
A manutenção do nível de água constante em reservatórios, ou sua variação em
intervalos que não comprometam a vazão programada é muitas vezes necessária, em
diversas aplicações práticas da engenharia, atividades experimentais e didáticas.
Fernandes e Gorgulho Júnior (2009), com objetivo de desenvolver um
equipamento para uso didático para automatizar o controle dos níveis inferior e superior
de um reservatório, utilizaram bóias conectadas a um computador para detectar os
momentos de acionamento e parada da motobomba.
Vidor e Oliveira (2006), para controlar o nível de água dos conversores de
corrente contínua de Furnas, que possuem os seus tiristores refrigerados por este fluido
e cujo funcionamento adequado é dependente da sua refrigeração eficiente, propuseram
a utilização de um sensor de nível potenciométrico.
Segundo Esser e Gularte (2008), o sistema de controle de nível em reservatórios
superiores dos sistemas urbanos de distribuição de água é feito geralmente por sensores
e cabos de comando instalados em poste da concessionária de energia, terrenos e
residências particulares. Conforme os autores, este sistema apresenta um elevado índice
de manutenção, pois o rompimento dos cabos é comum, assim como falha em seu
isolamento.
Teve-se como objetivo, desenvolver um sistema eletrônico capaz de manter a
carga hidráulica em um reservatório dentro de um nível configurável. Para tal foi
desenvolvido um sistema constituído de circuito eletrônico microcontrolado (Figura 6),
elemento sensor (transdutor de pressão) (Figura 1-b) e válvula hidráulica de
acionamento elétrico (Figura 1-c).
b)
a)
c)
Figura 1. a) reservatório e régua utilizada para medir a carga hidráulica; b)
detalhe da conexão da mangueira com o reservatório e sensor de pressão e c)
válvula hidráulica de acionamento elétrico.
O sistema foi instalado e avaliado no Laboratório de Hidráulica, Irrigação e
Drenagem da UNIVASF. A automação do nível de água deste reservatório contribuirá
para melhorar as atividades didáticas e pesquisa no âmbito dos cursos de graduação em
Engenharias Agrícola e Ambiental e Engenharia Agronômica e também na pósgraduação.
2. Fundamentação Teórica
O componente responsável pela aquisição e tratamento de dados provenientes
do sensor, tomada de decisão e acionamento da motobomba é o microcontrolador. Um
microcontrolador nada mais é do que um computador simplificado embarcado em um
único chip (BATES, 2006).
Um microcontrolador possui três elementos principais: periféricos de entrada e
saída, para se comunicar com o mundo exterior; memórias, para armazenar programas e
dados; e um processador, para fazer cálculos e manipular dados (BATES, 2008).
Observa-se que um microcontrolador além de possuir uma unidade de processamento,
como um microprocessador, possui memória de leitura e escrita para armazenamento
de dados, memória de somente leitura para o armazenamento de programa, dispositivos
periféricos como conversores A/D e D/A (em alguns casos) e interfaces para entrada e
saída digital. Na Figura 2 esses elementos são apresentados com mais detalhes em um
esquema.
Figura 2. Representação esquemática dos elementos de um microcontrolador
(BATES, 2008).
Existem diversos tipos de microcontroladores disponíveis no mercado
produzidos por diversos fabricantes, sendo os principais: AMCC, Atmel, Freescale
Semiconductor, Intel, National Semiconductor, Microchip Technology Silicon
Laboratories e Texas Instruments. Para a implementação deste projeto foi escolhido um
microcontrolador PIC da família 16 da Microchip, o PIC 16F877A (MICROCHIP,
2006).
A carga hidráulica do reservatório foi medida indiretamente por meio de um
transdutor de pressão. Como a pressão exercida na parte inferior do reservatório é
diretamente proporcional a altura da coluna d’água presente nele, a pressão pôde ser
convertida em carga hidráulica.
Atualmente os sensores de pressão com interface elétrica mais usados são os
construídos com elementos piezoresistivos (que variam sua resistividade
proporcionalmente a variação de pressão). Estes sensores são compostos por uma ou
mais unidades de elementos piezorresitivos, geralmente envoltos por uma substancia
gelatinosa (para prover proteção e estabilidade ao sistema), em contato com um
diafragma. Uma alteração na pressão induz uma tensão no diafragma e
consequentemente nos resistores de material piezorresistivo internos. Os valores dos
resistores mudam em proporção a força aplicada, permitindo a conversão de pressão em
um sinal de tensão proporcional à pressão (TUCATEL, 2005).
Nos casos mais comuns, a pressão é medida tendo por referência a pressão
atmosférica normal, que é a que corresponde à atmosfera que nos cerca. Essa pressão é
denominada relativa. No entanto, em muitas aplicações é importante que a pressão de
um determinado ambiente seja medida em relação ao vácuo. Nesse caso, é medida a
pressão absoluta.
Neste trabalho foi usado o transdutor de pressão Motorola MPX5050DP
(MOTOROLA, 1997).
3. Materiais e Métodos
O projeto, desenvolvimento e análise do equipamento foram realizados em
condições de laboratório, no setor de Hidráulica, Irrigação e Drenagem, da
Universidade Federal do Vale do São Francisco (UNIVASF), no município de JuazeiroBA. Como reservatório foi utilizado um castelo de água instalado dentro do
Laboratório, com altura de 3,50 m e diâmetro de 1,00 m (Figura 1-a).
O desenvolvimento do projeto foi dividido nas seguintes etapas: a) elaboração
do algoritmo descritivo para o sistema de controle; b) implementação do algoritmo em
linguagem de programação C; c) simulação do funcionamento do circuito eletrônico
microcontrolado em aplicativo computacional; d) implementação do circuito em placa
de protótipo; e) confecção da placa permanente; e f) calibração e avaliação final do
funcionamento do sistema.
Inicialmente o funcionamento do sistema de automação foi representado na
forma de fluxograma. A construção do algoritmo descritivo permite obter uma melhor
compreensão do problema a ser solucionado e paralelamente iniciar a implementação
de uma solução. A partir do fluxograma, foi desenvolvido o programa controlador do
sistema embarcado em linguagem de programação C utilizando o compilador PIC C
Compiler v.4.010 (CSS – Custom Computer Services1).
O funcionamento do circuito eletrônico e seu software embarcado foi simulado
com auxílio do aplicativo computacional Proteus Isis Professional v.7.6 (LABCENTER
ELECTRONICS LTD2). Após as correções dos erros observados durante a simulação
do sistema, foi executada a montagem do circuito eletrônico microcontrolado em placa
de protótipo e feita a gravação do arquivo hexadecimal no microcontrolador PIC
16F877A. Após novos testes e correções de erros, o circuito foi implementado em placa
definitiva.
Para a medida do nível de água no reservatório, necessária no processo de
calibração e avaliação do sensor, foi fixada na sua lateral externa uma régua composta
por uma trena metálica, uma ripa de madeira e uma mangueira fina e transparente,
Figura 1-a,b. Levando em consideração a precisão e a dilatação do metal constituinte da
trena, as imperfeições da ripa de madeira no qual a régua foi construída estimou-se o
erro da régua em ± 1 cm.
1
http://www.ccsinfo.com/
2
http://www.labcenter.co.uk/index.cfm
A calibração em software do sensor de pressão foi realizada utilizando 30 cargas
hidráulicas medidas na régua e suas respectivas leituras digitais exibidas no sistema. A
estes 30 pares de dados foi ajustado um modelo linear que relaciona a altura da coluna
d’água do reservatório com o valor obtido pelo transdutor de pressão, Figura 1-b.
Por fim, foi executada a avaliação da exatidão do sistema em determinar a carga
hidráulica. Esse processo consistiu na comparação de 10 cargas hidráulicas obtidas por
medição direta no reservatório com o valor obtido pelo sistema microcontrolado.
4. Resultados e Discussões
O Sistema de Controle de Nível de Reservatórios é formado por dois componentes
básicos: circuito eletrônico (hardware) e algoritmo (software) embarcado. A
manutenção do nível do reservatório foi automatizada por meio de um sistema
constituído por válvula hidráulica de acionamento elétrico, elemento sensor (transdutor
de pressão) e circuito eletrônico microcontrolado. A interface com o sistema de
automação foi realizada por intermédio de botões e interruptores (chaves táteis) e
display de cristal líquido (LCD). Desta forma, o usuário pode definir a altura de água no
reservatório e o sistema de automação o manterá conforme pré-estabelecido.
Após a definição dos requisitos do sistema, foi desenvolvido o fluxograma do
sistema de controle, apresentado na Figura 3, sendo h – a altura da coluna de água lida
pelo sensor em metros de coluna d’água (mca); H – a altura da coluna de água
configurada pelo usuário em metros de coluna d’água (mca); e V – a variação
percentual de H (%).
NÃO
SIM
CONFIGURAÇÃO
ESTA ATIVADO?
INÍCIO
SIM
H = ALTURA
V = VARIAÇÃO
CONFIGURAÇÃO
ESTA ATIVADO?
NÃO
h = ALTURA
ATUAL
SIM
CONFIGURAÇÃO
ESTA ATIVADO?
FECHAR
VÁLVULA
SIM
h <= H + V/100*H
e
h >= H - V/100*H
NÃO
ABRIR VÁLVULA
NÃO
Figura 3. Fluxograma do sistema de monitoramento do nível de água do Reservatório.
Inicialmente, o usuário deve ligar a chave de configuração do sistema e digitar
os dois parâmetros de configuração, a altura de água desejada (mca) e sua variação (%).
Em seguida deve-se desligar a chave de configuração para que o sistema entre em
estado de monitoramento e passe a controlar o nível de água do reservatório. No estado
de monitoramento o sistema executa um loop onde é executada a leitura da altura da
água no reservatório no sensor de nível, compara-o com os parâmetros de configuração
e, se necessário, atua na abertura ou fechamento da válvula de alimentação do
reservatório. O sistema pode ser reconfigurado a qualquer instante.
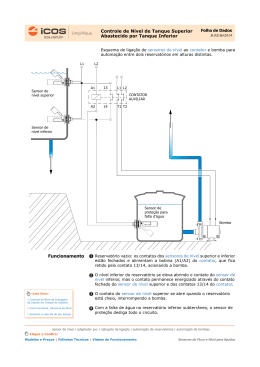
A arquitetura de hardware do sistema está esboçada na Figura 4. O
funcionamento do sistema é gerenciado pelo microcontrolador. Seus periféricos de
entrada de dados são os botões de configuração e o sensor de nível de água. Os
periféricos de saída são o display LCD e a válvula hidráulica de acionamento elétrico.
O display LCD exibe o valor do nível do reservatório e os dados de configuração. A
válvula hidráulica, quando aberta, permite a entrada de água no reservatório.
Válvula
Botões
Microcontrolador
Sensor de
Nível
Display LCD
Figura 4. Esboço da arquitetura de hardware do sistema proposto.
O microcontrolador utilizado para montagem do circuito eletrônico foi o
PIC16F877A de 8 bits e núcleo de 14 bits fabricado pela Microchip Technology, com
memória FLASH de programa com 8.192 palavras de 14 bits, memória RAM com 368
bytes, memória EEPROM com 256 bytes e conjunto RISC com 35 instruções. Sua
freqüência de operação clock possui limite superior de 20 MHz, resultando em uma
velocidade de processamento de 5 MIPS. Ele funciona com a tensão de alimentação de
2 a 5,5 V e seu encapsulamento DIP é de 40 pinos (MICROCHIP, 2006).
O circuito eletrônico do hardware foi simulado no aplicativo Proteus Isis, Figura
5. Nesta figura estão representados os botões e a chave de configuração, o
microcontrolador (PIC 16F877A), o sensor de pressão (representado por um
potenciômetro), o display LCD de 2 linhas de 16 caracteres cada e o buffer
(SN74HC541N). O principal objetivo desta fase é verificar o correto funcionamento do
software de controle. Os erros encontrados no software controlador do
microcontrolador foram corrigidos.
Figura 5. Simulação do Sistema de Monitoramento do Nível de Água de
Reservatórios em aplicativo computacional.
Para a maior organização do código do sistema de embarcado, ele foi
modularizado em quatro procedimentos, com funcionalidades bem definidas: main,
configuração, monitoramento e nível.
Na função main, são executadas as configurações básicas do microcontrolador:
a) definição da freqüência de funcionamento do sistema; b) definição dos pinos de
entrada e saída; c)_habilitação das interrupções; d) configuração do conversor A/D
interno; e e) inicialização do display LCD.
Na rotina de configuração se obtém a altura de água desejada para o reservatório
e a sua variação. Estes dados são armazenados em variáveis internas do
microcontrolador e utilizados durante o monitoramento.
Na rotina de monitoramento foi implementado o controle de nível do
reservatório. Esta rotina é responsável pela decisão de abertura e fechamento da válvula
hidráulica de acionamento elétrico. A função nível é utilizada para obter a altura atual
por intermédio da interface com o elemento sensor (transdutor de pressão). Nesta
função ocorre a conversão dos dados do transdutor de pressão em altura de água. O
microcontrolador efetua a conversão do sinal analógico do transdutor de pressão em um
sinal digital constituído de 10 bits, este valor digital é transformado em altura da água
no reservatório, através de uma função linear cujos coeficientes foram obtidos por meio
de experimentos. O nível obtido é então comparado com os dados obtidos pela rotina de
configuração; se ele estiver abaixo do intervalo programado o sistema abre a válvula ou
a mantém aberta e, em caso contrário, ele fecha a válvula ou a mantém fechada.
Em seguida foi feita a construção do sistema em placa de protótipos. Neste
circuito, além desses componentes presentes na simulação, foram necessários
capacitores adicionais, cristal oscilador de quartzo de 20 Mhz, um relê para isolação do
sistema da eletroválvula e um driver (ULN2806AG) para elevar a tensão de 5 VCC para
12 VCC (necessária para acionamento do relê). Este circuito está mostrado na Figura 6.
Figura 6. Circuito controlador do nível de água do reservatório em placa de
protótipos.
Ao ser inicializado, o sistema de automação exibe no LCD a mensagem de
apresentação: “Sistema de Monitoramento do Nível de Água do Reservatório
S.M.N.A.R”. Caso a chave configuração esteja desligada, o sistema apresentará no
display a mensagem solicitando o acionamento dela para que a rotina de configuração
seja iniciada. Na configuração o sistema solicitará a altura de água desejada e o seu
percentual de variação, após esta operação o sistema exibe um resumo da configuração
e aguarda o desligamento da chave configuração para dar início ao monitoramento. No
estado de monitoramento, o sistema lê periodicamente a altura de água do reservatório,
a exibe no LCD e o controla a abertura e o fechamento da válvula. A chave
configuração poderá ser acionada a qualquer momento para que os parâmetros de
configuração sejam modificados.
O circuito eletrônico microcontrolado é alimentado por uma fonte com as
seguintes tensões de saída: a) 5 VCC – utilizada para alimentação do microcontrolador
(PIC 16F877A), do transdutor de pressão (Motorola MPX5050DP) (MOTOROLA,
1997) e do buffer (SN74HC541N); b) 12 VCC – utilizada para alimentação do driver de
corrente (ULN2806AG); e c) 24 VAC – para ativação do solenóide da válvula
hidráulica (S-390-2-R Bermad). Uma foto do S.M.N.A.R é apresentada na Figura 7.
Figura 7. Circuito eletrônico microcontrolado para controle do nível de água de
reservatórios em placa definitiva e sua interface.
Durante a fase de testes, a maior dificuldade foi ajustar a função de conversão
do sinal analógico em carga hidráulica. Para a calibração do elemento sensor do sistema
foram utilizadas 29 alturas do nível de lamina d’água distintas e seu correspondente
valor digital, o que gerou o modelo linear de elevada precisão: ALTURA = 0,1126 +
0,0056 x VALOR DIGITAL, r2 = 0,9999 (Figura 8). Esta foi a equação utilizada no
sistema, conseguindo-se excelente precisão na determinação da altura pelo sistema de
automação.
O Sistema de Monitoramento de Nível de Água de Reservatórios foi avaliado
para verificação do funcionando adequado, mantendo a carga hidráulica conforme
configurado. Foram realizadas medições de dez níveis de água do reservatório. Os
valores medidos na régua (Hm), os obtidos pelo sistema eletrônico (Hs) e o erro relativo
percentual (ERP) estão apresentados da Tabela 1.
Figura 8. Representação dos pares de valores que relacionaram a resposta digital
do conversor A/D do microcontrolador e a altura do nível do reservatório (m).
Tabela 1. Valores da carga hidráulica medidas na régua (Hm), obtidas pelo sistema
eletrônico (Hs) e o erro relativo percentual (ERP).
Hm (cm)
50,0
80,0
109,9
140,0
170,1
200,1
229,8
258,7
288,5
318,7
Hs (cm)
50,0
80,0
110,0
140,0
170,0
200,0
230,0
260,0
290,0
320,0
ERP (%)
0,000
0,000
0,0910
0,000
0,0588
0,0500
0,0870
0,502
0,520
0,408
O erro relativo percentual variou de 0 a 0,52 %. Vale ressaltar que esse valor é
da ordem de grandeza da precisão da trena utilizada na medição da altura da coluna de
água que foi igual a 0,31 % para o maior valor medido.
O Sistema de Monitoramento de Nível de Água de Reservatórios mostrou-se
bastante robusto. Durante toda a fase de avaliação do carneiro hidráulico alternativo,
que durou cerca de 40 h, o sistema funcionou corretamente e não houve nenhum
componente queimado ou danificado. Esta robustez se deve a três fatores principais: a)
boa qualidade dos projetos dos circuitos; b) boa qualidade das placas finais; e c) boa
qualidade dos componentes utilizados na construção do circuito eletrônico final.
5. Conclusão
Com base no objetivo proposto e nos resultados obtidos, foi possível automatizar o
nível de água de reservatórios, por intermédio de um sistema simples, eficiente, de alto
desempenho, pouca e fácil manutenção, constituído por um circuito eletrônico
microcontrolado, transdutor de pressão e eletroválvula hidráulica.
O sistema desenvolvido revelou-se bastante preciso, robusto e versátil, podendo
ser utilizado em qualquer reservatório em instalações rurais, condomínios, instituições
de pesquisa e ensino e até mesmo por empresas responsáveis pela distribuição de água
urbana.
Referências
BATES, M. Interfacing PIC microcontrollers: Embedded design by interactive
simulation. Amsterdam, Holanda. Newnes, 2006. 312 p.
BATES, M. Programming 8-bit PIC Microcontrollers in C: with Interactive
Hardware Simulation. Amsterdam, Holanda. Newnes, 2008. 304 p.
ESSER, J. C.; GULARTE, C. B. Controle de nível automatizado através da pressão
no recalque elevatórias com reservatório superior. Disponível em:
<http://www.semasa.sp.gov.br/admin/biblioteca/docs/pdf/35Assemae013.pdf>.
Acesso em: 12 Nov 2008.
FERNANDES, A. R.; GORGULHO JÚNIOR, J. H. C. Equipamento didático
automático de controle de nível e temperatura da água em dois reservatórios.
Disponível em: <http://www.iem.efei.br/dpr/td/dezembro2001/pdf/11td1201.pdf>.
Acesso em: 5 Fev 2009.
MICHOCHIP. MICROCHIP PIC 16F87XA DATA SHEET: 28/40/44 Pin Enhanced
Flash Microcontrollers. Michochip Technology Incorporated. Arizona, USA. 234p.
2003. Dipsponível em: <http://ww1.microchip.com/downloads/en/devicedoc/39582b
.pdf>. Acesso em 8 Fev. 2011.
MOTOROLA. Integrated Silicon Pressure Sensor On-Chip Signal Conditioned,
Temperature Compensated and Calibrated. Semiconductor Technical Data. Rev.
3. 1997. Dipsponível em: < http://www.ebn1.gaw.ru/doc/Motorola/mpx5
050rev3.pdf>. Acesso em 8 Mar. 2011.
TURCATEL, R. L. et al. Sensores de Pressão. Universidade de Caxias do Sul, 2005.
VIDOR, T. F. R.; OLIVEIRA, R. A. Sistema de baixo custo para o controle do nível
de água da refrigeração do HVDC de Furnas. CRICTE 2006, XXI Congresso de
Iniciação Científica e Tecnológica em Engenharia, Ijuí. 2006. CD-ROM.
Baixar