Anais XVII Simpósio Brasileiro de Sensoriamento Remoto - SBSR, João Pessoa-PB, Brasil, 25 a 29 de abril de 2015, INPE
Metodologia para Identificação Automática de Feições Oceanográficas
Larissa Marques Freguete 1
Jorge Aching Leonid Samatelo 2
Julio Tomás Aquije Chacaltana 1
1
Universidade Federal do Espírito Santo - Departamento de Engenharia Ambiental Laboratório de Simulação de Escoamento com Superfície Livre - LABESUL
Caixa Postal s/n - 13416-000 - Goiabeiras - ES, Brasil
{aux.adm.marques,juliotac}@gmail.com
2
Universidade Federal do Rio Grande do Sul - FURG - Instituto de Informática
Caixa Postal 15064 - 91501-970 - RS, Brasil
[email protected]
Abstract. In this work we used SST images for vortex detection aiming the development of a methodology for
the automatic recognition of this oceanographic feature by SST imagery. The methodology was based on the
solution of a system of first order partial differential equations to classify their singularities. For a given SST
image, a calculation of the direction field was done for the solution of the eigen-values problem that was
achieved indirectly by the use of cost function minimization technique and then we were able to constructed the
equations system. The singularities classification was based on the eigen-values results and the vortex
localization was obtained by the computing of the Poincaré index (PI). It happens that the IP is high sensitive to
the variability of the orientation field and so it was necessary its analysis combined with the coherence field measurement of the anisotropy of the orientation image - that allows the discrimination of the real singularities
regions from the false ones. Sumamrizing, the eigenvalues associates to the equations system was used to
classified the singularities and the Pointcaré index and coherence were used in order to obtain the vortex location
and validate it. Results shown that this technique is a promisor method for vortex detection and its recommend in
further works the addition of application of the pattern recognition to this methodology presented at this study.
Palavras-chave: SST imagery, automatic recognition vórtices, singularities classification, imagens TSM,
reconhecimento automático, vórtices, classificação de singularidades
1. Introdução
Feições oceanográficas são padrões visuais relacionados a processos oceanográficos que
geram assinaturas em sua vizinhança de ocorrência que geralmente apresentam uma
distribuição de massa específica bem definida (De Paula et al., 2013). Os vórtices são
considerados como um dos exemplos destas feições que possuem uma configuração mais
próxima a forma circular ou semi-elíptica, sendo observado neles um alto gradiente de
propriedades físico-químicas e biológicas, como temperatura e concentração de clorofila-a
(Lentine e Souza,2005; Gaeta et al.,1999).
A importância do estudo desta feição é devido a sua influência no meio marinho pois
causam intensificação da velocidade das correntes, ascensão de águas mais profundas para
níveis mais superficiais e também geram transporte de massa d’águas (Castro et al.,2004;
Souza,2005). Por serem estruturas altamente dinâmicas, o uso da técnica de sensoriamento
remoto é vantajoso pois fornece relevante abrangência temporal e espacial (Robinson,1985;
Souza,2005; Lessa e Spinoza, 2007), contudo os estudos que utilizam imagens de satélite são
geralmente por método supervisionado o que gerou uma demanda, mais recentemente, por
métodos automáticos. Apesar dos esforços para o desenvolvimento de técnicas automáticas ou
semi-automáticas para reconhecimento e classificação de vórtices, ainda há uma lacuna nesta
área, o que gerou o desejo deste trabalho.
O uso de imagens de TSM (Temperatura Superficial do Mar) tornou-se uma alternativa
para o estudo de vórtices uma vez que a distribuição de TSM sofre influência de correntes de
larga escala, da orientação das plataformas continentais e dos próprios processos de mesoescala como: meandros, vórtices e ressurgências. Ademais, outro fator que corrobora na
6773
Anais XVII Simpósio Brasileiro de Sensoriamento Remoto - SBSR, João Pessoa-PB, Brasil, 25 a 29 de abril de 2015, INPE
justificativa do uso deste tipo de parâmetro físico é que existe uma alta correlação do campo
de velocidade com o campo de distribuição de TSM (SUGIMURA et al., 1984; CHAURIS et
al., 2013). Assim que este trabalho objetivou aplicar a metodologia de classificação de
impressões digitais desenvolvida por Samatelo e Vigo (2005) e Samatelo (2007) baseados na
ideia original de Rao e Jain (1990) de classificação de retratos de fase. A decisão por um
método automático foi tomada uma vez que é mais eficiente na disponibilização de resultados
e oferece menor necessidade de interferência humana trazendo um menor erro relacionado a
subjetividade de análise por parte do pesquisador.
2. Metodologia
Este trabalho foi realizado baseado nos métodos publicados por Samatelo e Vigo (2005) e
Samatelo (2007) que foram inspirados pelas ideias de Rao e Jain (1990,1992) de classificação
de texturas ou também chamadas de retratos de fase e pelas ideias de Rao e Schunck (1991) e
Kass e Witkin (1987) de computação de campo de orientação. A construção deste trabalho
seguiu a seguinte ordem: validação das imagens MUR SST ( Multi-scale Ultra-high
Resolution Sea Surface Temperature), aplicação do algoritmo em casos testes e por fim,
aplicação do mesmo em caso real.
A validação foi efetuada por meio do cálculo de parâmetros estatísticos como coeficiente
de correlação (R), RMSE ( root mean square error) e viés
n
(1)
(t s (i) t s )(t o (i) t o )
R
i 1
(n 1)SsSo
RMSE
Viés
(2)
1 n
(t s (i) t b (i)) 2
n i 1
(3)
1 n
(t s (i) tb (i)) .
n i 1
sobre uma série temporal de 2003-2012 de 4 boias PIRATA (Prediction and Research
Moored Array in the Atlantic) referentes a seguintes localizações 0ºS 35ºO, 8ºS 30ºO, 14ºS
32ºO e 19ºS 34ºO, sendo que as informações de TSM utilizadas foram as registradas entre 6h
e 7h GTM, devido a cobertura temporal das imagens de satélite.
Já na parte de aplicação do algoritmo, os procedimentos tiveram que ser subdivididos em
pequenas fases, a primeira dela foi para o cálculo do campo de orientação. Para isto foi
convoluído um filtro de dimensão (7,7) de Prewitt para o calculo do gradiente por diferenças
finitas, uma vez obtido seu valores, foi necessário encontrar os ângulos de orientação do
campo de temperatura após o calculo do gradiente médio
G s,x j.Gs,y (G x j.G y ) 2
(4)
( G 2 x G 2 y ) j.(2G x G y ),
necessário encontrar os ângulos sendo que a distribuição da TSM terá orientação perpendicu
ao seu gradiente, a orientação é encontrada por
1
2
GX ;
w2 W
1
2
GYY 2 W GY ;
w
,
1
GxY 2 W GXGy ;
w
1
(GX GYY ,GXGy )
2
Gxx
(5)
6774
Anais XVII Simpósio Brasileiro de Sensoriamento Remoto - SBSR, João Pessoa-PB, Brasil, 25 a 29 de abril de 2015, INPE
tan 1 ( y, x )
x0
( x, y) tan 1 ( y, x ) para x 0 e y 0 ;
tan 1 ( y, x )
x0e y0
1
0
2
para
,
1
0
2
(6)
onde Gx e Gx são os vetores gradientes referentes ao eixo x e y, respectivamente. E Gxx,
Gyy, e Gxy são o gra diente médio no eixo real x, no eixo y e o último; nos dois eixos, refe
rente a parte imaginária. E Γé o arctangente dos valores de gradiente. Adicionalmente, foi
calculada a coerência (anisotropia) para uma análise concomitante através da Equação 7,
1
(Gs,x , Gs,y )
W2 W
Coh
.
1
G s,x , Gs,y
2 W
W
(7)
A seguinte fase foi a o cálculo do Índice de Poincaré (IP) que é a soma das variações das
direções de um bloco ao longo de uma curva digital fechada, e por isso foi necessária a dupli
cação do valor dos ângulos mencionado anteriormente, pois ângulos opostos apresentam mês
ma orientação, o que levaria, durante a soma, à anulação dos dois, o que não é desejado (BA
ZEN e GEREZ,2000; SAMATELO,2007). Sendo θ(i,j) o campo de orientação, para cada
ponto (i,j), o IP foi computado de acordo como foi descrito por Samatelo (2007)
(k)
(k )
2
1 N1
IP( x, y)
(k) ; (k) (k) se (k) 2 ; (k) (x (k 1) mod N , y (k 1) mod N ) (x k , y k )
2 k 0
(k )
caso contrário
(8)
sendo
o ângulo que se encontra sobre a curva de número N, foi
utilizada apenas uma curva na convolução, e
o ângulo presente no bloco referente a
ponto instantâneo da convolução da curva.
Os valores possíveis para IP são 0o, 180o e 360o sendo esse valores catalogados como
ponto comum, core e delta, respectivamente. Para a fase de classificação os pontos desejados
são apenas o core e o delta.
Finalizada essa fase, deu seguida a fase de classificação e reconhecimento de retratos de
fase, que para a determinação das possíveis singularidades indicadas pelo cálculo do IP, foi
utilizada a técnica de minimização de função de custo por mínimos-quadrados termo sugerido
por Ayres e Rangayyan (2006) quando considerado um outro campo de orientação, sendo este
hipotético.O ajustamento entre o campo hipotético e o calculado foi obtido por
S
A ij
;
i, jW
A ij
1
R 1ijR 2ij sin( 1ij 2ij )
2
(9)
sendo
a área formada do triângulo formado pelos segmentos dos dois campos referentes a
mesma localização e R o comprimento de cada segmento, método de Rao e Jain (1992). A
classificação do padrão está ligada aos valores da matriz característica A formadora do
sistema de equação linear que podem descrever um retrato de fase
.
x
x
c d
V c A X B ; V c x. ; X ;B ; A
,
y
y
a b
y
6775
(10)
Anais XVII Simpósio Brasileiro de Sensoriamento Remoto - SBSR, João Pessoa-PB, Brasil, 25 a 29 de abril de 2015, INPE
assim a minimização de
N
S
si
T
traria os resultados almejados. Dado que,
s i ; s i ri x 2 i y 2 i ;
i 1
ri
a. sin(1 ).x i b sin(1 )y i sin(1 )e
. 2
.
2
...
x i cos(1 ))c y i . cos(1 ) d cos(1 )f
. 2
x i yi
.
2
x i yi
(11)
e de uma forma mais simplificada,pode ser escrita da seguinte forma
x 1 sin(1 ) y 1 sin( 1 ) x 1 cos(1 ) y 1 cos(1 )
U x 2 sin( 2 ) y 2 sin( 2 ) x 2 cos( 2 ) y 2 cos( 2 )
.
sin(1 ) cos(1 )
V sin( 2 ) cos( 2 )
(12)
Assim que S pode ser resumido a S = Uu+Vv, sendo u = [a,b,c,d]T e v = [e,f]T , então a
função de custo fica
(13)
P ss T (u T u 1) ;
T
(Uv Vv ) (u u 1) ,
e o custo mínimo da função é encontrado no ponto estacionário de P, assim
P
2.U T Uu 2U T Vv 2u 0;
u
P
2.V T Vv 2.V T Uu 0 ;
v
P
u T u 1 0;
U T V( V T V ) 1 V T U U T U
u T u 1;;
v ( V T V ) 1.V T Uu;
u u ;
(14)
de acordo com os valores de λ encontrados, o padrão foi classificado como cêntrico ou
espiral. Vale dizer que antes da aplicação do método de mínimos-quadrados foram excluídos
valores de coerência maiores que 0.5 para a não exposição a falsas singularidades. A
verificação da acurácia do programa se procedeu por meio de análise combinada com os
valores de coerência, assim as singularidades puderam ser localizadas.
A seguinte etapa foi a da construção dos casos testes, que foi baseado na resolução
analítica de um vórtice de giro anti-ciclônico com componentes
y
r2
x
v 2
r
u
; 3,
(15)
6776
Anais XVII Simpósio Brasileiro de Sensoriamento Remoto - SBSR, João Pessoa-PB, Brasil, 25 a 29 de abril de 2015, INPE
onde Γ é a sua intensidade e r, o comprimento do raio. De forma que para manter a analogia
dos campos vetoriais com os campos escalares de temperatura foram utilizadas imagens de
magnitude, que pode ser calculada como
V (u 2 v 2 )
.
r
(16)
Foram construídos 3 casos testes sendo testes todos com mesmo valor de = 3, sendo o
primeiro apenas com um núcleo, já o segundo teste foi com dois núcleos distanciados entre si
por e o terceiro, com um distanciamen to de . Após a aplicação dos testes, o algoritmo foi
aplicado sobre uma imagem de caso real.
3. Resultados e Discussão
Uma vez que teve-se a confirmação da aplicabilidade dessas imagens para a região
delimitada para o estudo, toma-se a vez a análise dos casos testes. E pôde ser observado um
funcionamento desejado por parte do algoritmo uma vez que os núcleos foram detectados
corretamente.
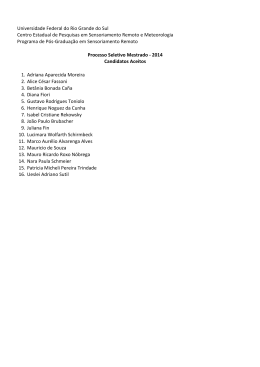
Os resultados para os 3 experimentos controlados mostraram que o modelo de fase
conseguiu identificar a localização dos núcleos dos vórtices com alta acurácia. E exatamente
nos núcleos foram visualizados baixos valores de coerência o que significa uma alta
anisotropia no campo de orientação. Estes valores de anisotropia foram usados para
correlacioná-los com a localização dos vórtices fornecida pelo índice de Poincaré, sendo que
foram restringidas singularidades com valores de coerência maiores que 0,5 evitando a
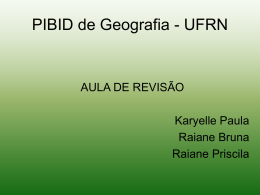
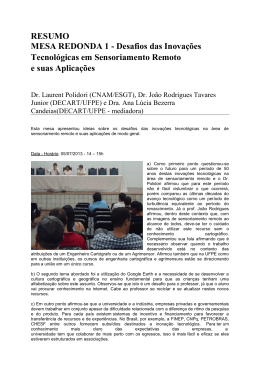
identificação de singularidades indesejadas. Os resultados do caso de núcleo único, de 2
núcleos distanciados de e de 2 núcleos distanciados de
1,2 e 3, respectivamente.
estão disponibilizados nas Figura
Figura 1. Representação das saídas obtidas pelo programa de identificação. Esquerda superior: campo vetorial
construído. Direita superior: representação da intensidade dos vetores. Esquerda inferior: campo de orientação.
Direita inferior: coerência.
6777
Anais XVII Simpósio Brasileiro de Sensoriamento Remoto - SBSR, João Pessoa-PB, Brasil, 25 a 29 de abril de 2015, INPE
Figura 2. Exemplos de saídas para caso de dois vórtices. Esquerda superior: campo vetorial construído. Direita
superior: representação da intensidade dos vetores. Esquerda inferior: campo de orientação. Direita inferior:
coerência.
Figura 3. Exemplo de saídas para caso de dois núcleos próximos. . Esquerda superior: campo vetorial construído.
Direita superior: representação da intensidade dos vetores. Esquerda inferior: campo de orientação. Direita
inferior: coerência.
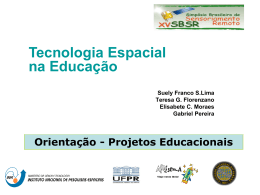
Na imagem MUR SST utilizada, referente a data de 28 de julho de 2006, é observada a
presença de um vórtice próximo ao Cabo de São Tomé - RJ com um gradiente aproximado de
2-3 Co, Vórtices na região sudoeste do Brasil são bem frequentes e bem estudados, tais como
os de São Tomé, Cabo Frio e de Vitória( KAMPEL et al.,2001; PAES,2009, TEIXEIRA et
al.,2009). No entanto, analisando o resultado do campo de orientação e localização obtidos
6778
Anais XVII Simpósio Brasileiro de Sensoriamento Remoto - SBSR, João Pessoa-PB, Brasil, 25 a 29 de abril de 2015, INPE
como saída da execução do algoritmo, notou-se que há a pontuação de singularidades
inverídicas, enquanto que o local do verdadeiro vórtice não foi identificado.
Figura 4. Teste para o dia 28 de julho do ano de 2006 de uma imagem MURSST. À esquerda o campo
orientacional e a representação dos pontos de identificação de singularidades. À direita, a visualização da
coerência.
Analisando o resultado do campo de orientação e localização mostrado na Figura 4 notouse que há a pontuação de singularidades inverídicas enquanto o local do verdadeiro vórtice
(marcado com círculo azul) não foi identificado. Esse erro pode estar ocorrendo devido a
provável inexatidão na minimização da função de custo, pois o campo orientacional está bem
representado, o que indica um bom cálculo do gradiente e da orientação.
Outra possível causa para este comportamento indevido é a característica de
comportamento sensível a mudanças de orientação por parte do IP. Como a metodologia foi
desenvolvida com base na duplicação dos ângulos para a execução do cálculo de IP, isso
implica em utilizar números complexos, o que leva a sugestão de que nos próximos trabalhos
o cálculo dos componentes dos ângulos seja feitos por números reais. A classificação de
singularidades é uma etapa dependente do resultado do IP, logo, se os valores de IP forem
incorretos, a classificação também será. Além disso, as imagens dos testes eram provenientes
de campos ideais, com vórtices com configuração circular perfeita, o que no caso real já não
ocorre; assim que vórtices com formas mais distantes de um semicírculo ou círculo podem
não ser identificados.
4. Conclusão
Assim que concluiu-se que o algoritmo apresentou coerência física e bom funcionamento,
porém apenas para os casos testes, os quais são casos perfeitos. Assim que não foi possível a
aplicação do método para detecção de vórtices ao longo da costa brasileira. Notou-se,
também, que a modificação de certos parâmetros pode levar o programa a se adequar melhor
a imagens reais.
Portanto, para a continuidade da aplicação dessa metodologia, sugere-se o
desenvolvimento de técnica de reconhecimento de padrões para o melhor ajuste do algoritmo
ao padrão de vórtices encontrados na natureza.
6779
Anais XVII Simpósio Brasileiro de Sensoriamento Remoto - SBSR, João Pessoa-PB, Brasil, 25 a 29 de abril de 2015, INPE
5. Citações e Referências
Ayres, F. J.; rangayyan, R. M. Optimization procedures for the estimation of phase portrait parameters of orien
tation fields. In: Electronic Imaging 2006. International Society for Optics and Photonics, v.12,p. 606407606407, 2006.
Bazen,A.M.; Gerez, S. H. Directional field computation for fingerprints based on the principal component
analysis of local gradients. Proceedings of ProRISC2000. Veldhoven,Holanda, p. 215-222,2000.
CASTRO,S.L.;EMERY, W.J.; WICK, G.A. Skin and bulk sea surface temperature estimates from passive
microwave and thermal infrared satellite imagery and their relationships to atmospheric forcing. Gayana. v. 2, n
68, p. 96-101, 2004.
Chauris, H.; Karoui, I.; Wackernagel, H.; Garreau, P.; Craneguy, P.; Bertino,L. Ocean eddy tracking with
circlets. Disponível em: <http://citeseerx.ist.psu.edu/viewdoc/download?doi=10.1.1.164.5552&rep=rep1&type
=pdf.>. Acesso em: ago. 08 de 2013.
De Paula, A. C.; Calado, L.; De Mattos, R. A. O Emprego de Feições Oceanográficas Detectadas por
Plataformas Satelitais em Apoio a Operações Navais. Programa Módulo,p.20.2008. Disponível em: <
http://www.ieav.cta.br/serfa08/arquivos/caderno_resumos_ser fa08.pdf#page =13>.Acesso em: ago. 11 de 2013.
Gaeta, S. A. et al. The Vitória Eddy and its relation to the phytoplankton biomass and primary productivity
during the austral fall of 1995. Archive of Fishery and Marine Research, v. 47, n. 2-3, p. 253-270, 1999.
Kampel, M. et al. Use of Satellite data for Studying and monitoring the southeast coast of Brazil. Selper, v. 17,
n. 1, 2001.
Kass,M.; Witkin, A. Analyzing oriented patterns. Computer vision, graphics, and image processing,v. 37, n.
3, p. 362-385, 1987.
Lentini,C.A.D;Souza,R.B. Eddies e Vórtices de Meso-escala no Oceano Atlântico Sudoeste Medidos por
Satélites. . In: SOUZA, R. B (Ed). Oceanografia por Satélites. São Paulo: Oficina de textos, 2005, p. 166-175.
Lessa, F. T.; Espinoza, H. F. Análise e caracterização das feições oceanográficas da região sudeste e sul do
Brasil observadas nos verões 2001, 2003 e 2005. In: Congresso Latino-Americano de Ciências do Mar COLACMAR, 2007. Florianópolis. Resumos, CD-ROM.
Paes, R.C.O.V. Metodologia de reconhecimento de vórtices a partir de imagens orbitais. Rio de Janeiro,
2009. 97 p. Tese de doutorado ( Doutorado em Engenharia Civil) - Programa de Engenharia Civil COPPE/UFRJ. Uni versidade Federal do Rio de Janeiro,2009.
Rao,A.R;Jain,R. Analyzing oriented textures through phase portraits. Proceedings International Conference
on Pattern Recognition. Atlantic, p. 336-340,1990.
Rao,A.R;Jain,R.C. Computerized flow field analysis: Oriented texture fields. Transactions on Pattern Analysis
and Machine Intelligence, v. 14, n. 7, p. 693-709, 1992.
Rao,A.R.;Schunck,B.G. Computing oriented texture fields. CVGIP: Graphical Models and Image Processing,
v. 53, n. 2, p. 157-185, 1991.
Robinson,I.S. Satellite Oceanography – an introduction for oceanogra phers and remote-sensing scientists.
Chichester: Ellis Horwood Ltd, 1985.
Samatelo, J. L. A.; Vigo, D. A. R. Reconocimiento Biométrico de Huellas Dactilares y su implementación en
DSP. 2005. Monografia de conclusão do curso Engenharia Elétrica.Perú: Faculdade de Engenharia Elétrica Universidad Nacional Mayor de San Marcos; 2005.
Samatelo,J.L.A. Um sistema de classificação de impressões digitais.2007. 111 p. Dissertação (Mestrado em
Engenharia Elétrica) – Programa de Pós-Graduação em Engenharia Elétrica – PPGEE, Universidade Federal do
Espírito Santo,2007.
Souza, R. B. Satellite observations of eddies the Southwestern Atlantic Ocean during 1993 and 1994.In:
Simpósio Brasileiro de Sensoriamento Remoto, 12, 2005, Goiânia. Anais do XII Simpósio Brasileiro de
Sensoriamento Remoto,São José dos Campos,INPE, 2005. Artigos p. 3687-3694.
Sugimura, T.; Tanaka, S.; Hatakeyama, Y. Surface temperature and current vectors in the sea of Japan from
NOAA-7 AAVHRR data. Proceedings of the 15th International Liege Colloquium on Ocean
Hydrodynamics.Kyoikusha, v. 38, p. 133-147,1984.
Teixeira, G. L. G.; Chacaltana, J. T. A.; Acuña, J. R. Análise da distribuição da temperatura superficial do mar
ao largo do estado do Espírito Santo–BR, durante o inverno de 1997. In: Simpósio Brasileiro de Sensoriamento
Remoto,14,2009, Natal. Anais XIV Simpósio Brasileiro de Sensoriamento Remoto,São José dos Campos,
INPE,2009. Artigos p. 6673-6680.
6780
Baixar